You might also like
- Radiometric Tracking Techniques for Deep-Space NavigationFrom EverandRadiometric Tracking Techniques for Deep-Space NavigationNo ratings yet
- PIC Microcontroller Projects in C: Basic to AdvancedFrom EverandPIC Microcontroller Projects in C: Basic to AdvancedRating: 5 out of 5 stars5/5 (10)
- Mipi RFFE Specification v1-10Document90 pagesMipi RFFE Specification v1-10Tit fuckerNo ratings yet
- Archimedes, The Free 2D Semicondutor Device SimulatorDocument89 pagesArchimedes, The Free 2D Semicondutor Device SimulatorSiva KrishnaNo ratings yet
- Mike 21 Flow Model: Mud Transport Module User GuideDocument96 pagesMike 21 Flow Model: Mud Transport Module User GuideAhmad Safii MaarifNo ratings yet
- Eech ManualDocument236 pagesEech ManualBabar89No ratings yet
- WMOGuidelines For Nowcasting TechniquesDocument82 pagesWMOGuidelines For Nowcasting TechniquesGaucho OndouaNo ratings yet
- Strona 18 Wybro Aplikacji NFCForum TS Type 4 Tag - 2.0Document40 pagesStrona 18 Wybro Aplikacji NFCForum TS Type 4 Tag - 2.0djdaxNo ratings yet
- Mike FM HD 2D PDFDocument120 pagesMike FM HD 2D PDFAlvaro LemosNo ratings yet
- MS T F2sdaadssdDocument50 pagesMS T F2sdaadssdarthur baggioNo ratings yet
- MIKE21 HD ModuleDocument90 pagesMIKE21 HD ModulezariadjiNo ratings yet
- Osgi Core-7 0 0 PDFDocument490 pagesOsgi Core-7 0 0 PDFCristhian FradeNo ratings yet
- Aircraft Noise Prediction Methods and ChallengesDocument37 pagesAircraft Noise Prediction Methods and ChallengesBaena D-bikeNo ratings yet
- Mike 21 Flow Model FMDocument144 pagesMike 21 Flow Model FMAlvaro LemosNo ratings yet
- UntitledDocument325 pagesUntitledJaved MushtaqNo ratings yet
- Litpack ManuelDocument66 pagesLitpack ManuelMoussaab BerkaniNo ratings yet
- FaciesRefinementTool UserGuideDocument25 pagesFaciesRefinementTool UserGuide叶云飞No ratings yet
- Feflow 7.0: User GuideDocument220 pagesFeflow 7.0: User GuideDaniel SalasNo ratings yet
- NES 102 Requirements For Air Conditioning and VentilationDocument158 pagesNES 102 Requirements For Air Conditioning and VentilationJEORJENo ratings yet
- Purdue University: Graduate School Thesis/Dissertation AcceptanceDocument92 pagesPurdue University: Graduate School Thesis/Dissertation AcceptancePriyanjali DasNo ratings yet
- OCPI 2.2 d2Document186 pagesOCPI 2.2 d2jaimin patelNo ratings yet
- Draft 0.4: RPG Rule SetDocument32 pagesDraft 0.4: RPG Rule SetPanNo ratings yet
- MIKEDocument66 pagesMIKEanon_911628021No ratings yet
- Mike FM HD 2DDocument148 pagesMike FM HD 2Dzulma siregarNo ratings yet
- Seismic Acquisition, Land System Equipment.Document205 pagesSeismic Acquisition, Land System Equipment.Carlos Terraza OyagaNo ratings yet
- Entity Properties and Parameters 7 1 5Document623 pagesEntity Properties and Parameters 7 1 5Anonymous GtBrT1No ratings yet
- Ada ProgrammingDocument410 pagesAda ProgrammingKatNo ratings yet
- Raymarine Axiom Plus Installation ManualDocument84 pagesRaymarine Axiom Plus Installation Manualmatias dagostoNo ratings yet
- Avr Libc User Manual 2.0.0 PDFDocument343 pagesAvr Libc User Manual 2.0.0 PDFfrankieb99No ratings yet
- MIKE21BWDocument196 pagesMIKE21BWahmedbuilagmanazNo ratings yet
- FIX Orchestra Technical Specification v1.0 RC5 45Document45 pagesFIX Orchestra Technical Specification v1.0 RC5 45jmanganasNo ratings yet
- HB 42-1992 (Reference Use Only) General Conditions of Contract (As 2124-1992) - User GuideDocument8 pagesHB 42-1992 (Reference Use Only) General Conditions of Contract (As 2124-1992) - User GuideSAI Global - APACNo ratings yet
- tempusUG (1)Document500 pagestempusUG (1)Nishanth GowdaNo ratings yet
- 6DOF Simulation of Maritime ApplicationsDocument23 pages6DOF Simulation of Maritime ApplicationsquacrobatNo ratings yet
- COBOL New Standard PDFDocument986 pagesCOBOL New Standard PDFPaoloRNo ratings yet
- 267 enDocument112 pages267 enNur RahmatNo ratings yet
- Avr Libc User Manual 1.8.1Document368 pagesAvr Libc User Manual 1.8.1Tavan farazNo ratings yet
- Ansys ThermalDocument96 pagesAnsys ThermalPritish MohanNo ratings yet
- Photoshopelements 9 HelpDocument343 pagesPhotoshopelements 9 HelpRaymundo Cano ViverosNo ratings yet
- Osmohlr UsermanualDocument100 pagesOsmohlr UsermanualHazem ElabedNo ratings yet
- Mike FM Elos 2DDocument110 pagesMike FM Elos 2DJoseNo ratings yet
- Development of A Small Unmanned Aerial Vehicle Longitudinal ModelDocument88 pagesDevelopment of A Small Unmanned Aerial Vehicle Longitudinal ModelfbhshNo ratings yet
- Solarflare Ef Vi User GuideDocument148 pagesSolarflare Ef Vi User Guideergodic0% (1)
- OPM XUL 952-583 enDocument220 pagesOPM XUL 952-583 enmblaurentiu84100% (1)
- Air Transport SystemDocument11 pagesAir Transport SystemGaneshNo ratings yet
- EMVCo 3DS SDKSpec 220 122018Document130 pagesEMVCo 3DS SDKSpec 220 122018klcekishoreNo ratings yet
- GilbertstudyfinaldraftDocument65 pagesGilbertstudyfinaldraftRamesh Kumar Malepati100% (1)
- M21C User GuideDocument186 pagesM21C User Guideankur sharmaNo ratings yet
- CXX For OpenCLDocument22 pagesCXX For OpenCLHadji MhamedNo ratings yet
- Osmohlr UsermanualDocument101 pagesOsmohlr Usermanualdelhi punjabNo ratings yet
- YazDocument202 pagesYazThierry BouilletNo ratings yet
- MIKE21SWDocument122 pagesMIKE21SWKhay Tien SimNo ratings yet
- Helmut FisherDocument180 pagesHelmut FisherManuelNo ratings yet
- Swan PDFDocument128 pagesSwan PDFAnonymous K02EhzNo ratings yet
- 3hh13800daaatqzza20 - v1 - r6.5 System Description For 7362 Isam DFSFDocument270 pages3hh13800daaatqzza20 - v1 - r6.5 System Description For 7362 Isam DFSFqwertyNo ratings yet
- OpenACC 3 0Document149 pagesOpenACC 3 0Erick CafferataNo ratings yet
- Mike FM HD 2D PDFDocument108 pagesMike FM HD 2D PDFR Gery Sandy AgtiarNo ratings yet
- FC PH PDFDocument478 pagesFC PH PDFHanhNo ratings yet
- NES 779 Part 1 Requirements For 90 - 10 Copper Nickel Alloy MaterialDocument34 pagesNES 779 Part 1 Requirements For 90 - 10 Copper Nickel Alloy MaterialJEORJE100% (1)
- ComConf User EN V2 25Document160 pagesComConf User EN V2 25JOEKESNo ratings yet
- Flight Dynamics Model For The Real-Time Flight SimulationDocument37 pagesFlight Dynamics Model For The Real-Time Flight SimulationMarek Cel100% (1)
- Terrain Data For Flight SimulatorsDocument29 pagesTerrain Data For Flight SimulatorsMarek CelNo ratings yet
- Helicopter Rotor ModelDocument35 pagesHelicopter Rotor ModelMarek CelNo ratings yet
- Propellers Aerodynamic CharacteristicsDocument109 pagesPropellers Aerodynamic CharacteristicsMarek CelNo ratings yet
- Cessna 172 - Flight Simulation DataDocument24 pagesCessna 172 - Flight Simulation DataMarek CelNo ratings yet
- Exp F2 - Drag Measurement On Cylindrical BodiesDocument4 pagesExp F2 - Drag Measurement On Cylindrical BodiesMohamad Ikhwan0% (1)
- Aerodynamic Lift at Reynolds Numbers BelowDocument2 pagesAerodynamic Lift at Reynolds Numbers BelowTaekevNo ratings yet
- BET Explains How Blade Design Impacts Helicopter PerformanceDocument33 pagesBET Explains How Blade Design Impacts Helicopter PerformanceAnonymous Da8GxwVNo ratings yet
- Three Point Bending Test: Experiment No 1Document9 pagesThree Point Bending Test: Experiment No 1Manjunatha Babu N.sNo ratings yet
- Force Exerted by A Jet On Stationary Curved Plates: Ce8403 - Applied Hydraulics Engineering/V.Priya/Ap/CivilDocument12 pagesForce Exerted by A Jet On Stationary Curved Plates: Ce8403 - Applied Hydraulics Engineering/V.Priya/Ap/CivilRanaditya SandilyaNo ratings yet
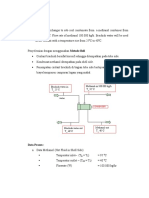
- Design methanol condenser to sub-cool from 95C to 40CDocument20 pagesDesign methanol condenser to sub-cool from 95C to 40CLiyan Fajar GintaraNo ratings yet
- Chemical Engineering MCQs: Thermodynamics and PropertiesDocument180 pagesChemical Engineering MCQs: Thermodynamics and PropertiesEngr Javeed Nawaz QaisraniNo ratings yet
- Midas - Nonlinear Analysis Using General Link ElementsDocument20 pagesMidas - Nonlinear Analysis Using General Link ElementsSampathNarayananNo ratings yet
- Jhamuna Tower Design DataDocument15 pagesJhamuna Tower Design DataArindam RoyNo ratings yet
- Lecture 2 To 4 Exercise ProblemsDocument1 pageLecture 2 To 4 Exercise ProblemsKim Dowell PanganibanNo ratings yet
- JEE - MODULE 2 - CHEM - +1 NM Physical Chemistry - 2Document191 pagesJEE - MODULE 2 - CHEM - +1 NM Physical Chemistry - 2Hrittik DasNo ratings yet
- Shear Box TestDocument11 pagesShear Box TestNurul AdhaNo ratings yet
- Mitsui Wall Type Series On-Off MVE - Technical SpecificationDocument1 pageMitsui Wall Type Series On-Off MVE - Technical SpecificationBruno Faria CotaNo ratings yet
- Properties of Concrete As Construction MaterialDocument22 pagesProperties of Concrete As Construction MaterialEdisonNo ratings yet
- Scroll VdsDocument5 pagesScroll VdsRob616No ratings yet
- KATHMANDU UNIVERSITY FLUID MECHANICS ASSIGNMENTDocument2 pagesKATHMANDU UNIVERSITY FLUID MECHANICS ASSIGNMENTabdata wakjiraNo ratings yet
- NSCP2015 - 7th Ed. - Earthquake LoadsDocument30 pagesNSCP2015 - 7th Ed. - Earthquake LoadsEric VillenasNo ratings yet
- Navier Stokes Eq NDocument12 pagesNavier Stokes Eq NSarath Chandra100% (1)
- Objectives:: Apparent DensityDocument12 pagesObjectives:: Apparent DensityRosni hasanNo ratings yet
- An Empirical Equation For Thermodynamic Properties of Light Hydrocarbons and Their Mixtures Ii. Mixtures of Methane, Ethane, Propane, and NbutaneDocument13 pagesAn Empirical Equation For Thermodynamic Properties of Light Hydrocarbons and Their Mixtures Ii. Mixtures of Methane, Ethane, Propane, and NbutanelucasNo ratings yet
- Flash & Fire PointDocument3 pagesFlash & Fire PointAnkur BansalNo ratings yet
- Dog Plate & Tubular Support Subsea Template DesignDocument4 pagesDog Plate & Tubular Support Subsea Template DesignAkhmad Syahroni100% (1)
- Chapter 2 (Part 1)Document110 pagesChapter 2 (Part 1)datonizamNo ratings yet
- Seismic Behavior of Reinforced Concrete Buildings - SozenDocument41 pagesSeismic Behavior of Reinforced Concrete Buildings - SozentrabajosicNo ratings yet
- International Pte LTD: Technical Specifications For Perfex Set Mounted Radiator (Rev1)Document1 pageInternational Pte LTD: Technical Specifications For Perfex Set Mounted Radiator (Rev1)bacNo ratings yet
- Unit ConversionDocument20 pagesUnit ConversionHimanshu YadavNo ratings yet
- Rankine Vapor CyclesDocument77 pagesRankine Vapor CyclesAldren ArnaizNo ratings yet
- Accumulator or Koomey UnitDocument3 pagesAccumulator or Koomey Unitmmohsinaliawan100% (3)
- International Journal of Fatigue: SciencedirectDocument8 pagesInternational Journal of Fatigue: SciencedirectRafael RodriguezNo ratings yet
- Tension test lab reportDocument19 pagesTension test lab reportEduardo Araújo0% (1)