You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
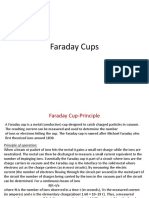
- Faraday CupsDocument10 pagesFaraday CupsAshish SharmaNo ratings yet
- 8085 MicroprocessorDocument39 pages8085 MicroprocessorAshish SharmaNo ratings yet
- Using de Series ADCDocument20 pagesUsing de Series ADCAshish SharmaNo ratings yet
- Humanity Ends HereDocument2 pagesHumanity Ends HereAshish SharmaNo ratings yet
- Cqiprach LogDocument26 pagesCqiprach LogAshish SharmaNo ratings yet
- Return Loss: Curve Info DB (ST (1,1) ) Setup1: SW Eep1Document3 pagesReturn Loss: Curve Info DB (ST (1,1) ) Setup1: SW Eep1Ashish SharmaNo ratings yet
- Doc1 HFSSDocument1 pageDoc1 HFSSAshish SharmaNo ratings yet
- Sampling Signals: Bustec Production LTDDocument6 pagesSampling Signals: Bustec Production LTDAshish SharmaNo ratings yet
- Oil Filter (Hydraulic Hammer) - Replace - If Equipped (M0083583-14)Document3 pagesOil Filter (Hydraulic Hammer) - Replace - If Equipped (M0083583-14)Alberto BastidasNo ratings yet
- Negative Impedance Converter - Wikipedia, The Free EncyclopediaDocument3 pagesNegative Impedance Converter - Wikipedia, The Free Encyclopediamaithuong85No ratings yet
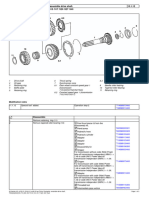
- Dismantle, Assemble Drive ShaftDocument3 pagesDismantle, Assemble Drive ShaftAhmad EdyNo ratings yet
- Haier Htaf21sDocument15 pagesHaier Htaf21sch3o10836266No ratings yet
- Harley-Davidson V-Rod Muscle 2 Into 1 Competition Series Exhaust System Installation Instructions PART# 75-116-9Document3 pagesHarley-Davidson V-Rod Muscle 2 Into 1 Competition Series Exhaust System Installation Instructions PART# 75-116-9v8chargeNo ratings yet
- Dr. Fixit Pidicrete CF 21: High Range Water Reducing Admixture For ConcreteDocument1 pageDr. Fixit Pidicrete CF 21: High Range Water Reducing Admixture For Concretenickdash09No ratings yet
- Operating Level Agreement (OLA) TemplateDocument10 pagesOperating Level Agreement (OLA) Templatedskr83nnNo ratings yet
- Circuit DiagramsDocument120 pagesCircuit DiagramsCarlos Andrés Sánchez VargasNo ratings yet
- Lab 6231BDocument82 pagesLab 6231BMassimo AmatrudaNo ratings yet
- M500Document176 pagesM500David Huamani UrpeNo ratings yet
- JCB JS145 Long Reach ExcavatorDocument6 pagesJCB JS145 Long Reach ExcavatorNitzOONo ratings yet
- Indian Standard: Graphical Symbols Used in ElectrotechnologyDocument24 pagesIndian Standard: Graphical Symbols Used in ElectrotechnologySrikanth ReddyNo ratings yet
- Volvo Excavator-480dl-Swing Motor2 - SwingDocument2 pagesVolvo Excavator-480dl-Swing Motor2 - SwingVinod SekharNo ratings yet
- Appendix - X Mechanical Design Criteria, Equipment/Material and Technical SpecificationsDocument35 pagesAppendix - X Mechanical Design Criteria, Equipment/Material and Technical SpecificationsAijaz MalikNo ratings yet
- FiWaRec Product Catalogue For DN33 and DN50 Chemical Gas Systems - Rev. 20Document21 pagesFiWaRec Product Catalogue For DN33 and DN50 Chemical Gas Systems - Rev. 20b.leite.domNo ratings yet
- Bladder Tank Proportioning System Pre-Piped: HD Fire Protect Pvt. Ltd. Technical DataDocument8 pagesBladder Tank Proportioning System Pre-Piped: HD Fire Protect Pvt. Ltd. Technical DataSadegh AhmadiNo ratings yet
- Machines For Grinding and Polishing of Workpieces: & Co. KGDocument44 pagesMachines For Grinding and Polishing of Workpieces: & Co. KGGabriel TresNo ratings yet
- Basic Price Triwulan 4Document22 pagesBasic Price Triwulan 4Pidi LeongNo ratings yet
- LPile 2015 Technical ManualDocument238 pagesLPile 2015 Technical ManualMahesh HanmawaleNo ratings yet
- Intro To Industrial Security ConceptsDocument13 pagesIntro To Industrial Security ConceptsSinagTala100% (1)
- 6 M Span CulvertDocument16 pages6 M Span CulvertSUJIT TaLUKDARNo ratings yet
- 17.6 Pipeline Rehabilitation: Materials Design and Lifecycle Performance Guide - Volume 2Document7 pages17.6 Pipeline Rehabilitation: Materials Design and Lifecycle Performance Guide - Volume 2ankeshkatochNo ratings yet
- My Insignia OptionsDocument3 pagesMy Insignia Optionscarl robinsonNo ratings yet
- Conector BNCDocument28 pagesConector BNCjhon fernando castroNo ratings yet
- Cyr Et Al-2008-Journal of The American Ceramic SocietyDocument6 pagesCyr Et Al-2008-Journal of The American Ceramic SocietySaurav BhattacharjeeNo ratings yet
- Groovy For Domain-Specific Languages - Second Edition - Sample ChapterDocument26 pagesGroovy For Domain-Specific Languages - Second Edition - Sample ChapterPackt PublishingNo ratings yet
- Booklet Pindad Elektrik A5 Eng - Compressed PDFDocument18 pagesBooklet Pindad Elektrik A5 Eng - Compressed PDFIjal LubisNo ratings yet
- R30i Control Installation & Owners Manual: Bath On/Off Control For AmerecDocument3 pagesR30i Control Installation & Owners Manual: Bath On/Off Control For AmerecHazim AshNo ratings yet
- YCM500AW Operatin Manual - InglésDocument107 pagesYCM500AW Operatin Manual - InglésConociendoANuestraGenteNo ratings yet
- High Tech 2008Document58 pagesHigh Tech 2008deborah_malangNo ratings yet