You might also like
- Triumph Spitfire MK4 - 1500Document108 pagesTriumph Spitfire MK4 - 1500Ricardo100% (1)
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsFrom EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsNo ratings yet
- Analytical Method For Voidage Replacement Ratio Calculation in Reservoirs With Quasicritical FluidsDocument12 pagesAnalytical Method For Voidage Replacement Ratio Calculation in Reservoirs With Quasicritical Fluidsjefpri simanjuntak100% (1)
- A New Method To Predict The Performance of Gas Condensate ReservoirDocument13 pagesA New Method To Predict The Performance of Gas Condensate Reservoirswaala4realNo ratings yet
- Introduction To Major Crop FieldsDocument32 pagesIntroduction To Major Crop FieldsCHANDANINo ratings yet
- Accounting for Business CombinationsDocument52 pagesAccounting for Business CombinationsEliza BethNo ratings yet
- Mud LoggingDocument29 pagesMud LoggingDavidandy0% (1)
- Investigation On The Impact of Voidage Replacement Ratio and Other Parameters On The Performances of Polymer Flood in Heavy Oil Based On Field DataDocument18 pagesInvestigation On The Impact of Voidage Replacement Ratio and Other Parameters On The Performances of Polymer Flood in Heavy Oil Based On Field Datajefpri simanjuntakNo ratings yet
- Report On Gas Lift Design, Operation and TroubleshootingDocument69 pagesReport On Gas Lift Design, Operation and TroubleshootingAfzal Akthar75% (4)
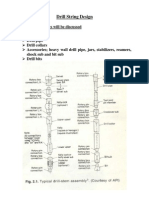
- Drill String DesignDocument3 pagesDrill String Designjefpri simanjuntakNo ratings yet
- Van Everdingen, A. F. The Skin Effect and Its Influence On The Productive Capacity of A WellDocument6 pagesVan Everdingen, A. F. The Skin Effect and Its Influence On The Productive Capacity of A WellSolenti D'nouNo ratings yet
- BASIC Welltesting For DST SupvDocument43 pagesBASIC Welltesting For DST SupvGatot Sapar100% (1)
- Build Up For Heavy OilDocument9 pagesBuild Up For Heavy OilSadanand ChaurasiyaNo ratings yet
- Anchoring in Bad WeatherDocument2 pagesAnchoring in Bad WeatherDujeKnezevicNo ratings yet
- Mini Frac Applications and BenefitsDocument45 pagesMini Frac Applications and BenefitsDeepak RanaNo ratings yet
- Market Segmentation Targeting Strategy and Positioning Strategy Performance Effects To The Tourists Satisfaction Research in Pangandaran Beach Pangandaran DistrictDocument10 pagesMarket Segmentation Targeting Strategy and Positioning Strategy Performance Effects To The Tourists Satisfaction Research in Pangandaran Beach Pangandaran DistrictRizki Kurnia husainNo ratings yet
- Prosper GasliftDocument12 pagesProsper Gasliftkurtbk100% (3)
- Net Positive Suction Head for Rotodynamic Pumps: A Reference GuideFrom EverandNet Positive Suction Head for Rotodynamic Pumps: A Reference GuideRating: 5 out of 5 stars5/5 (1)
- Drill String DesignDocument12 pagesDrill String DesignAsaadgz100% (1)
- List of Dealers in NoidaDocument240 pagesList of Dealers in NoidaAparna Pande67% (3)
- AI Writing Tools For Social Media Marketing Creating Compelling PostsDocument5 pagesAI Writing Tools For Social Media Marketing Creating Compelling PostsJames DanielsNo ratings yet
- 2020 Ifs InsuranceDocument262 pages2020 Ifs InsuranceSensi CTPrima100% (1)
- SPE/IADC 91356 Pressure Stability Analysis For Aerated Mud Drilling Using An Analytical Hydraulics ModelDocument8 pagesSPE/IADC 91356 Pressure Stability Analysis For Aerated Mud Drilling Using An Analytical Hydraulics ModelmsmsoftNo ratings yet
- SPE-177971-MS - Processing Formation Test Data To Reduce The Risk Inherent in Capturing Representative Samples in Zones With Highly Varying PermeabilitiesDocument13 pagesSPE-177971-MS - Processing Formation Test Data To Reduce The Risk Inherent in Capturing Representative Samples in Zones With Highly Varying PermeabilitiesSamanta MirandaNo ratings yet
- Investigate Gas Well Performance Using Nodal AnalysisDocument15 pagesInvestigate Gas Well Performance Using Nodal Analysisrafiullah353No ratings yet
- Ipr TPRDocument6 pagesIpr TPRsisiminkinNo ratings yet
- Reknik Reservoir 2Document6 pagesReknik Reservoir 2Delvia LebangNo ratings yet
- A Simplified Analysis of Well Blow-Outs: June 2003Document13 pagesA Simplified Analysis of Well Blow-Outs: June 2003hamida yaakoubiNo ratings yet
- Spe 61Document6 pagesSpe 61Sa Sara RaNo ratings yet
- Gas Wells Deliverability Determination Using FlowafterDocument18 pagesGas Wells Deliverability Determination Using FlowafterLibya TripoliNo ratings yet
- Ojo Poe SLBDocument16 pagesOjo Poe SLBSebastian MorenoNo ratings yet
- Kel-1 GAs Lift1Document12 pagesKel-1 GAs Lift1Indra ArdiansyahNo ratings yet
- HZ Well High PressureDocument14 pagesHZ Well High PressureColin JordanNo ratings yet
- Recent Developments in The Interpretation and Application of DST DataDocument11 pagesRecent Developments in The Interpretation and Application of DST DataBahman MatouriNo ratings yet
- A Model For Calculating Bottom-Hole Pressure From Simple Surface Data in Pumped WellsDocument9 pagesA Model For Calculating Bottom-Hole Pressure From Simple Surface Data in Pumped WellsLibya TripoliNo ratings yet
- SPE 95272 MS P noPWDocument8 pagesSPE 95272 MS P noPWsocialmedia9997No ratings yet
- Automatic Gas Influxes Detection in Offshore Drilling Based On MachineLearning TechnologyDocument12 pagesAutomatic Gas Influxes Detection in Offshore Drilling Based On MachineLearning TechnologyLukombo N'LanduNo ratings yet
- SPE 124116 A Comprehensive Methodology To Avoid and Remediate Drilling Problems by Real Time PWD Data InterpretationDocument8 pagesSPE 124116 A Comprehensive Methodology To Avoid and Remediate Drilling Problems by Real Time PWD Data InterpretationLeticia Bueno NogueiraNo ratings yet
- New Method To Estimate FFL With WFT DataDocument10 pagesNew Method To Estimate FFL With WFT DataPaolo MartiniNo ratings yet
- James A. CraigDocument17 pagesJames A. CraigEngr Sadiq WazirNo ratings yet
- Development of Improved Testing Procedure For Wells With Sustained Casing PressureDocument15 pagesDevelopment of Improved Testing Procedure For Wells With Sustained Casing PressureHamza HamzaNo ratings yet
- Draft Welltest Interpretation Budi-1Document15 pagesDraft Welltest Interpretation Budi-1Shindu AryaNo ratings yet
- Models Methods Simulating Gas Pipeline Blowdown (1989) - KK Botros Et AlDocument11 pagesModels Methods Simulating Gas Pipeline Blowdown (1989) - KK Botros Et AlbeenolandNo ratings yet
- Offshore Gas Pipeline Linepack To Improve The Flexibility of System Facilities: Energy and GeotechnicsDocument8 pagesOffshore Gas Pipeline Linepack To Improve The Flexibility of System Facilities: Energy and Geotechnicssnikraftar1406No ratings yet
- Prediction of Standpipe Pressure Ver 1Document6 pagesPrediction of Standpipe Pressure Ver 1Dipankar ChowdhuryNo ratings yet
- Huque2020 Article KickDetectionAndRemedialActionDocument29 pagesHuque2020 Article KickDetectionAndRemedialActionMohamed MahmoudNo ratings yet
- Well Performance Analysis Based On Flow Calculations and IprDocument21 pagesWell Performance Analysis Based On Flow Calculations and IprTientcheu FrankNo ratings yet
- SPE-178298-MS Gas Well Test Interpretation: Niger Delta Field ExperienceDocument14 pagesSPE-178298-MS Gas Well Test Interpretation: Niger Delta Field ExperienceAnis BoukezoulaNo ratings yet
- Rigorous Simulation of LPG Releases From Accidental Leaks: Chemical EngineeringDocument6 pagesRigorous Simulation of LPG Releases From Accidental Leaks: Chemical EngineeringPramahadi FebriyantoNo ratings yet
- Cav03 OS 4 010Document7 pagesCav03 OS 4 010Emad ElsaidNo ratings yet
- SPE/IADC-173074-MS Blowout Well-Flow Simulation For Deepwater Drilling Using High-Pressure/ High-Temperature (HP/HT) Black-Oil Viscosity ModelDocument14 pagesSPE/IADC-173074-MS Blowout Well-Flow Simulation For Deepwater Drilling Using High-Pressure/ High-Temperature (HP/HT) Black-Oil Viscosity ModelHaider AshourNo ratings yet
- IADC/SPE-178881-MS Swab and Surge Pressures With Reservoir Fluid Influx Condition During MPDDocument13 pagesIADC/SPE-178881-MS Swab and Surge Pressures With Reservoir Fluid Influx Condition During MPDqjbsexNo ratings yet
- Well Preformance Analysis Basedon Flow Calculationsand IPRDocument21 pagesWell Preformance Analysis Basedon Flow Calculationsand IPRChristavie MboungouNo ratings yet
- SPE/IADC-173005-MS Elastic Pipe Control and Compensation For Managed Pressure Drilling Under Sea Wave Heave ConditionsDocument16 pagesSPE/IADC-173005-MS Elastic Pipe Control and Compensation For Managed Pressure Drilling Under Sea Wave Heave ConditionsqjbsexNo ratings yet
- SPE 132475 Using Second Derivative of Transient Pressure in Welltest Analysis of Low Permeability Gas ReservoirsDocument9 pagesSPE 132475 Using Second Derivative of Transient Pressure in Welltest Analysis of Low Permeability Gas ReservoirsFajar MariyuadiNo ratings yet
- Spe 171303 MsDocument9 pagesSpe 171303 MsFati FatiNo ratings yet
- PE 501 Petroleum Engineering Design ProjectDocument12 pagesPE 501 Petroleum Engineering Design ProjectPïÑk KhaledNo ratings yet
- SPE 78695 Reserve Analysis For Tight Gas: D Q Q Di GDocument16 pagesSPE 78695 Reserve Analysis For Tight Gas: D Q Q Di Gtomk2220No ratings yet
- Spe 71074 MSDocument11 pagesSpe 71074 MSRamanamurthy PalliNo ratings yet
- Comparing Formation and Fluid Temperatures During Well ProductionDocument7 pagesComparing Formation and Fluid Temperatures During Well ProductionShahzad AshrafNo ratings yet
- Determination of Pressure Drop in A Natural Flowing Gas Well Using Nodal AnalysisDocument14 pagesDetermination of Pressure Drop in A Natural Flowing Gas Well Using Nodal AnalysisJoseph IRANZINo ratings yet
- SPE-188589-MS Enumeration Approach in Condensate Banking Study of Gas Condensate ReservoirDocument12 pagesSPE-188589-MS Enumeration Approach in Condensate Banking Study of Gas Condensate ReservoirkhayalNo ratings yet
- Beltranparedes 2010Document12 pagesBeltranparedes 2010Abdillah MuharramNo ratings yet
- SSRN Id3453601Document10 pagesSSRN Id3453601rany ppNo ratings yet
- Rasmus 2013Document19 pagesRasmus 2013aidaNo ratings yet
- (Unit Operations Laboratory-2) : Name: Siraj Ali Aldeeb ID: 3214118Document9 pages(Unit Operations Laboratory-2) : Name: Siraj Ali Aldeeb ID: 3214118Siraj AL sharifNo ratings yet
- Well Testing (TEP 4309) Pertemuan 10Document31 pagesWell Testing (TEP 4309) Pertemuan 10Perdi ApriansyahNo ratings yet
- Modelling of Fluid Flow and Heat Transfer in A RecDocument11 pagesModelling of Fluid Flow and Heat Transfer in A RecElmano MiguelNo ratings yet
- Spe52170-Dynamic Nodal AnalysisDocument9 pagesSpe52170-Dynamic Nodal AnalysisJosé TimanáNo ratings yet
- Production II - Lecture 2Document8 pagesProduction II - Lecture 2علي التميميNo ratings yet
- Drilling Well Control Syllabus Level 3 and 4Document3 pagesDrilling Well Control Syllabus Level 3 and 4SahatnainggolanNo ratings yet
- ThesisDocument3 pagesThesiskamikrrbNo ratings yet
- 582 AbDocument5 pages582 Abjefpri simanjuntakNo ratings yet
- Analisa Penyebab Hilang Sirkulasi Lumpur C958730eDocument13 pagesAnalisa Penyebab Hilang Sirkulasi Lumpur C958730erazi suwandiNo ratings yet
- Brochure - IWCF Well Intervention 2019 (190110)Document3 pagesBrochure - IWCF Well Intervention 2019 (190110)Prayoga KurniawanNo ratings yet
- Brochure - IWCF Well Intervention 2019 (190110)Document3 pagesBrochure - IWCF Well Intervention 2019 (190110)Prayoga KurniawanNo ratings yet
- Geoth PDFDocument6 pagesGeoth PDFjefpri simanjuntakNo ratings yet
- Basic Geothermal One 1Document8 pagesBasic Geothermal One 1jefpri simanjuntakNo ratings yet
- Drilling Well Control Syllabus Level 3 and 4Document3 pagesDrilling Well Control Syllabus Level 3 and 4SahatnainggolanNo ratings yet
- A guide to understanding ancient runesDocument1 pageA guide to understanding ancient runesjefpri simanjuntakNo ratings yet
- Tabel Trigonometri PDFDocument4 pagesTabel Trigonometri PDFjefpri simanjuntak100% (1)
- Practical Well Test InterpretationDocument12 pagesPractical Well Test InterpretationDavid Garcia NavarroNo ratings yet
- Analisis Performance Sumur X Menggunakan Metode Standing Dari Data Pressure Build Up Testing PDFDocument5 pagesAnalisis Performance Sumur X Menggunakan Metode Standing Dari Data Pressure Build Up Testing PDFjefpri simanjuntakNo ratings yet
- SPE 106657 Simulation Study of Drilling Horizontal Wells in One of Iranian Oil FieldsDocument12 pagesSPE 106657 Simulation Study of Drilling Horizontal Wells in One of Iranian Oil Fieldsjefpri simanjuntakNo ratings yet
- Diagnosis of Excessive Water Production in Horizontal Wells Using WOR PlotsDocument9 pagesDiagnosis of Excessive Water Production in Horizontal Wells Using WOR Plotsjefpri simanjuntakNo ratings yet
- Analisis Performance Sumur X Menggunakan Metode Standing Dari Data Pressure Build Up Testing PDFDocument5 pagesAnalisis Performance Sumur X Menggunakan Metode Standing Dari Data Pressure Build Up Testing PDFjefpri simanjuntakNo ratings yet
- Dynamic Induced Fractures in Waterflooding and EORDocument16 pagesDynamic Induced Fractures in Waterflooding and EORjefpri simanjuntakNo ratings yet
- Tabel Trigonometri Sin Cos Tan 360Document4 pagesTabel Trigonometri Sin Cos Tan 360Ririn BhardiansyahNo ratings yet
- SPE 106657 Simulation Study of Drilling Horizontal Wells in One of Iranian Oil FieldsDocument12 pagesSPE 106657 Simulation Study of Drilling Horizontal Wells in One of Iranian Oil Fieldsjefpri simanjuntakNo ratings yet
- Diagnosis of Excessive Water Production in Horizontal Wells Using WOR PlotsDocument9 pagesDiagnosis of Excessive Water Production in Horizontal Wells Using WOR Plotsjefpri simanjuntakNo ratings yet
- Book 3Document2 pagesBook 3jefpri simanjuntakNo ratings yet
- SetupDocument1 pageSetupjefpri simanjuntakNo ratings yet
- Numerical Simulation of Competing Chemical Flood DesignsDocument15 pagesNumerical Simulation of Competing Chemical Flood Designsjefpri simanjuntakNo ratings yet
- IntroductionDocument1 pageIntroductionjefpri simanjuntakNo ratings yet
- Book 3Document2 pagesBook 3jefpri simanjuntakNo ratings yet
- DSRD Ar05Document132 pagesDSRD Ar05djon888No ratings yet
- Mechanical Seminar ListDocument9 pagesMechanical Seminar ListalokbdasNo ratings yet
- Consultants DirectoryDocument36 pagesConsultants DirectoryAnonymous yjLUF9gDTSNo ratings yet
- C. Corpo DigestDocument9 pagesC. Corpo DigestRaymarc Elizer AsuncionNo ratings yet
- 03board of Directors Resolution For AGRONetBIZ ENGLISHDocument1 page03board of Directors Resolution For AGRONetBIZ ENGLISHyuswirdaNo ratings yet
- Balcony AnalysysDocument4 pagesBalcony AnalysysKory EstesNo ratings yet
- Certified Elder Law Attorney Middletown NyDocument8 pagesCertified Elder Law Attorney Middletown NymidhudsonlawNo ratings yet
- W3. The Relational ModelDocument21 pagesW3. The Relational ModelSABOOR UR RAHMANNo ratings yet
- T-18 - Recommended Target Analysis For Ductile IronsDocument2 pagesT-18 - Recommended Target Analysis For Ductile Ironscrazy dNo ratings yet
- Nse3 FortiClient Quiz Attempt Review - CopieDocument4 pagesNse3 FortiClient Quiz Attempt Review - Copieking jumper343100% (1)
- HSD (1) .Product - Spec.sheet BootstrapReserviorDocument2 pagesHSD (1) .Product - Spec.sheet BootstrapReserviorJay R SVNo ratings yet
- Russian Federation Country Codes from World Development IndicatorsDocument262 pagesRussian Federation Country Codes from World Development IndicatorsMuhammad Talha TalhaNo ratings yet
- C-TECC Principles Guide TECC EducationDocument4 pagesC-TECC Principles Guide TECC EducationDavid Sepulveda MirandaNo ratings yet
- OriginalDocument4 pagesOriginalJob ValleNo ratings yet
- Government's Role in Public HealthDocument2 pagesGovernment's Role in Public Healthmrskiller patchNo ratings yet
- Building C# Applications: Unit - 2Document25 pagesBuilding C# Applications: Unit - 2mgsumaNo ratings yet
- 2D IconsDocument8 pages2D IconsJacky ManNo ratings yet
- Innova 2100-IQ, 3100/3100-IQ, 4100/4100-IQ Cardiovascular Imaging System SM DVDDocument1 pageInnova 2100-IQ, 3100/3100-IQ, 4100/4100-IQ Cardiovascular Imaging System SM DVDSwami Meera100% (1)
- Space Management Guidelines: Brief SummaryDocument17 pagesSpace Management Guidelines: Brief SummaryMOHD JIDINo ratings yet
- Unit 8 Grammar Short Test 1 A+B Impulse 2Document1 pageUnit 8 Grammar Short Test 1 A+B Impulse 2karpiarzagnieszka1No ratings yet
- Lesson2.1-Chapter 8-Fundamentals of Capital BudgetingDocument6 pagesLesson2.1-Chapter 8-Fundamentals of Capital BudgetingMeriam HaouesNo ratings yet
- Research On HIBADocument9 pagesResearch On HIBAPixel GeekNo ratings yet