You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- 28454150108Document2 pages28454150108srinivas murthyNo ratings yet
- Varoc Air Dynamometers: The Experts in TurbomachineryDocument8 pagesVaroc Air Dynamometers: The Experts in Turbomachinerysrinivas murthyNo ratings yet
- MAX-PAC Brochure Concepts NREC WebDocument8 pagesMAX-PAC Brochure Concepts NREC Websrinivas murthyNo ratings yet
- 1 s2.0 S0032579119508823 MainDocument6 pages1 s2.0 S0032579119508823 Mainsrinivas murthyNo ratings yet
- Restoration of TurbineDocument2 pagesRestoration of Turbinesrinivas murthyNo ratings yet
- Gouasmi 2012 IOP Conf. Ser.: Mater. Sci. Eng. 28 012015Document6 pagesGouasmi 2012 IOP Conf. Ser.: Mater. Sci. Eng. 28 012015srinivas murthyNo ratings yet
- Q1 FY 21 (Consolidated) Key Highlights:: For Immediate ReleaseDocument4 pagesQ1 FY 21 (Consolidated) Key Highlights:: For Immediate Releasesrinivas murthyNo ratings yet
- Interacting With HMDocument8 pagesInteracting With HMsrinivas murthyNo ratings yet
- 6th Floor, 'A' Wing, Janpath Bhawan, Janpath, New Delhi - 110001 Phones:23739722/23717249/23355408 Fax: 23717250 E-Mail: Cgewho@nic - inDocument2 pages6th Floor, 'A' Wing, Janpath Bhawan, Janpath, New Delhi - 110001 Phones:23739722/23717249/23355408 Fax: 23717250 E-Mail: Cgewho@nic - insrinivas murthyNo ratings yet
- Srinivas ResumeDocument2 pagesSrinivas Resumesrinivas murthyNo ratings yet
- Nerolac-Excel Mica MarbleDocument2 pagesNerolac-Excel Mica Marblesrinivas murthyNo ratings yet
- DoDocument7 pagesDosrinivas murthyNo ratings yet
- Design and Analysis of A Machine Tool Structure Based On Structural BionicsDocument7 pagesDesign and Analysis of A Machine Tool Structure Based On Structural Bionicssrinivas murthyNo ratings yet
- BJDocument7 pagesBJsrinivas murthyNo ratings yet
- Batch Meshing PDFDocument6 pagesBatch Meshing PDFsrinivas murthyNo ratings yet
- Exercise 3a: 2D Shell Meshing and Topology Refinement: Step 1: Load The Model 03a-2D-MESH - HMDocument8 pagesExercise 3a: 2D Shell Meshing and Topology Refinement: Step 1: Load The Model 03a-2D-MESH - HMsrinivas murthyNo ratings yet
- HM-3140: Batch Meshing: ToolsDocument6 pagesHM-3140: Batch Meshing: Toolssrinivas murthyNo ratings yet
- Sl. No. Name Total MarksDocument1 pageSl. No. Name Total Markssrinivas murthyNo ratings yet
- Service Factor Selection: RransrvrrssronDocument1 pageService Factor Selection: Rransrvrrssronsrinivas murthyNo ratings yet
- Creating A Hex-Penta Mesh Using SurfacesDocument12 pagesCreating A Hex-Penta Mesh Using Surfacessrinivas murthyNo ratings yet
- Bettlpeed - N) Ri' Oi Ffiw: J Pitch (MM) T.IiiDocument1 pageBettlpeed - N) Ri' Oi Ffiw: J Pitch (MM) T.Iiisrinivas murthyNo ratings yet
- Page 8Document1 pagePage 8srinivas murthyNo ratings yet
- OF Effective: Pitch Diameter (MM) Diameter + (2Document1 pageOF Effective: Pitch Diameter (MM) Diameter + (2srinivas murthyNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- API RP 1102 SpreadsheetDocument5 pagesAPI RP 1102 Spreadsheetdrramsay100% (4)
- Tridium Europe DatasheetDocument2 pagesTridium Europe DatasheetHoàngTrầnNo ratings yet
- Trend Management How To Effectively Use Trend-Knowledge in Your Company (Jörg Blechschmidt)Document121 pagesTrend Management How To Effectively Use Trend-Knowledge in Your Company (Jörg Blechschmidt)Antonio Gonzalez AriasNo ratings yet
- Comparison of Plate Count Agar and R2A Medium For Enumeration of Heterotrophic Bacteria in Natural Mineral WaterDocument4 pagesComparison of Plate Count Agar and R2A Medium For Enumeration of Heterotrophic Bacteria in Natural Mineral WaterSurendar KesavanNo ratings yet
- Heat ExchangerDocument5 pagesHeat Exchangersara smithNo ratings yet
- Experiential MarketingDocument23 pagesExperiential Marketingambesh Srivastava100% (5)
- Executive Shirt CompanyDocument6 pagesExecutive Shirt CompanyPramod kNo ratings yet
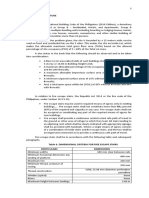
- A Research Paper On DormitoriesDocument5 pagesA Research Paper On DormitoriesNicholas Ivy EscaloNo ratings yet
- G120D Getting Started 0418 en-USDocument94 pagesG120D Getting Started 0418 en-USHamadi Ben SassiNo ratings yet
- Command Center Processing and Display System ReplacementDocument2 pagesCommand Center Processing and Display System ReplacementImranNo ratings yet
- Analysis and Design of Cantilever Slab Analysis and Design of Cantilever SlabDocument3 pagesAnalysis and Design of Cantilever Slab Analysis and Design of Cantilever SlabMesfinNo ratings yet
- Business Design Thinking - Nguyễn Quang MinhDocument39 pagesBusiness Design Thinking - Nguyễn Quang MinhbuikimhoangoanhtqkNo ratings yet
- Examen Inglés de Andalucía (Ordinaria de 2019) (WWW - Examenesdepau.com)Document2 pagesExamen Inglés de Andalucía (Ordinaria de 2019) (WWW - Examenesdepau.com)FREESTYLE WORLDNo ratings yet
- PQA824 ManualDocument100 pagesPQA824 ManualElkin AguasNo ratings yet
- Evaluation of A Systematic Approach To Matrix Acidizing On An Oil Producing WellDocument6 pagesEvaluation of A Systematic Approach To Matrix Acidizing On An Oil Producing WellTrần Hoàng ChươngNo ratings yet
- Symptoms and DiseasesDocument8 pagesSymptoms and Diseaseschristy maeNo ratings yet
- April 7-9 2022-WPS OfficeDocument3 pagesApril 7-9 2022-WPS OfficeAllen AntolinNo ratings yet
- Student Material CN Version - 2017.11.10Document25 pagesStudent Material CN Version - 2017.11.10Jagaddeesha BRNo ratings yet
- If You Restyou RustDocument4 pagesIf You Restyou Rusttssuru9182No ratings yet
- (Checked) 12 Anh 1-8Document9 pages(Checked) 12 Anh 1-8Nguyễn Khánh LinhNo ratings yet
- CV LeTranNguyen enDocument4 pagesCV LeTranNguyen enLe Tran NguyenNo ratings yet
- Microwave Project ReportDocument30 pagesMicrowave Project ReportMd RakibNo ratings yet
- KIT REQUEST FORM - GradDocument2 pagesKIT REQUEST FORM - Graddamie aadamsNo ratings yet
- MPDFDocument10 pagesMPDFshanmuganathan716No ratings yet
- Low Invasion CoringDocument4 pagesLow Invasion CoringKHALEDFEKAIRNo ratings yet
- Getting Started in Steady StateDocument24 pagesGetting Started in Steady StateamitNo ratings yet
- Awb 4914934813Document1 pageAwb 4914934813Juandondr100% (1)
- Differential Association Theory - Criminology Wiki - FANDOM Powered by WikiaDocument1 pageDifferential Association Theory - Criminology Wiki - FANDOM Powered by WikiaMorningstarAsifNo ratings yet
- Universal Human Values NotesDocument13 pagesUniversal Human Values NotesS RamNo ratings yet
- Storage Tank Design Calculation - Api 650: Close Floating RoofDocument32 pagesStorage Tank Design Calculation - Api 650: Close Floating RoofhgagNo ratings yet