You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- VGB-B 105.1 VGB-Richtlinie KKS Kraftwerk-Kennzeichensystem Begriffszuordnungsliste Zum Aggregate - Und BetriebsmittelschlüsselDocument15 pagesVGB-B 105.1 VGB-Richtlinie KKS Kraftwerk-Kennzeichensystem Begriffszuordnungsliste Zum Aggregate - Und BetriebsmittelschlüsselChris WebelmanNo ratings yet
- Hand BagDocument32 pagesHand Bagrohitkgangotia87% (39)
- Elderorpoeticedd 01 BrayuoftDocument422 pagesElderorpoeticedd 01 BrayuoftAhalia100% (3)
- Of For: Static Industrial Turuine-GeneratorsDocument9 pagesOf For: Static Industrial Turuine-GeneratorsMartua MarioNo ratings yet
- Stability Performance of New Static Excitation System With Boost-Buck ConverterDocument8 pagesStability Performance of New Static Excitation System With Boost-Buck ConverterMartua MarioNo ratings yet
- Machine Learning Methods For Detecting Anomalies in A Power Transformer by Monitoring Its Hot-Spot Temperature - Chiara & MiguelDocument6 pagesMachine Learning Methods For Detecting Anomalies in A Power Transformer by Monitoring Its Hot-Spot Temperature - Chiara & MiguelMartua MarioNo ratings yet
- Fundamentals of NN (Laurene Fausett) PDFDocument476 pagesFundamentals of NN (Laurene Fausett) PDFMartua MarioNo ratings yet
- Charge Simulation MethodDocument7 pagesCharge Simulation MethodMartua MarioNo ratings yet
- Finite Difference MethodDocument16 pagesFinite Difference MethodMartua Mario100% (1)
- Grade 6 Env. Scinence Wordlist 2Document2 pagesGrade 6 Env. Scinence Wordlist 2reshid museNo ratings yet
- PELSDenverSlides PDFDocument71 pagesPELSDenverSlides PDFFernando Sobrino-Manzanares MasNo ratings yet
- Essay Test: Discussant: Topic: Subject: ProfessorDocument2 pagesEssay Test: Discussant: Topic: Subject: ProfessorJenelyn ApinadoNo ratings yet
- Manual Event Corporate TownhallDocument14 pagesManual Event Corporate TownhallDiva Bella Permata - D3 KeperawatanNo ratings yet
- Tn-Fee Structure 2022 - 28.05.2022Document1 pageTn-Fee Structure 2022 - 28.05.2022MSPET TrustNo ratings yet
- Portes Five AnalysisDocument7 pagesPortes Five AnalysisDotecho Jzo EyNo ratings yet
- 2017 - YEAR5 - BI - Paper1 - 1st PRODocument13 pages2017 - YEAR5 - BI - Paper1 - 1st PRORani ArumugamNo ratings yet
- Molykote High Vacuum Grease US SDS 000000838919Document9 pagesMolykote High Vacuum Grease US SDS 000000838919toukiNo ratings yet
- English Final Exam-Music and FilmssDocument10 pagesEnglish Final Exam-Music and FilmssKhalis PrimaNo ratings yet
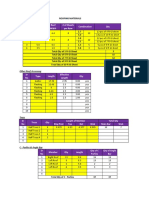
- Roofing Materials EstimateDocument1 pageRoofing Materials Estimatejhomel garciaNo ratings yet
- Solo Parents Programs and Services of Local Government Unit of Quezon City: It's Impact On Economic Condition Among BeneficiariesDocument43 pagesSolo Parents Programs and Services of Local Government Unit of Quezon City: It's Impact On Economic Condition Among BeneficiariesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Renaissance & MannerismDocument42 pagesRenaissance & Mannerismde-kNo ratings yet
- Foundation of Digital GovermentDocument17 pagesFoundation of Digital Govermentizal005No ratings yet
- AQA A-Level Physics For A-Level Year 1 and As - GibbsDocument123 pagesAQA A-Level Physics For A-Level Year 1 and As - GibbsNarendra SinghNo ratings yet
- CO1-L3 - Measures of VariabilityDocument39 pagesCO1-L3 - Measures of VariabilityRAINIER DE JESUSNo ratings yet
- Lecture 6 Powder Bed FusionDocument33 pagesLecture 6 Powder Bed Fusionshanur begulajiNo ratings yet
- Cryptoasset Fundamental AnalysisDocument14 pagesCryptoasset Fundamental AnalysisFlorian CorneliuNo ratings yet
- Shed Type Structures - Steel Vs Bamboo: Mini Project Report OnDocument33 pagesShed Type Structures - Steel Vs Bamboo: Mini Project Report OnSaravanan Silamban100% (2)
- Journal of Taibah University Medical SciencesDocument2 pagesJournal of Taibah University Medical Sciencesعمر أميرNo ratings yet
- Sentece Correction TabletDocument9 pagesSentece Correction TabletEslam DawoodNo ratings yet
- Asco Direct Acting Solenoid Valve - 320Document6 pagesAsco Direct Acting Solenoid Valve - 320SatyamEng100% (1)
- Lecture 9 (Dirk Mohr, ETH, Rate-Dependent Plasticity and Fracture) PDFDocument52 pagesLecture 9 (Dirk Mohr, ETH, Rate-Dependent Plasticity and Fracture) PDFชัยรัตน์ ตันตืไพบูลย์วุฒิNo ratings yet
- Project Report/seminar On Lime Soil StabilizationDocument28 pagesProject Report/seminar On Lime Soil StabilizationShubhankar Roy100% (6)
- Lecture6 Discrete ProbabilityDocument3 pagesLecture6 Discrete Probabilitysourav kumar rayNo ratings yet
- The Nature of ResearchDocument14 pagesThe Nature of ResearchRonnel Aldin FernandoNo ratings yet
- Part I Pre-BoardDocument11 pagesPart I Pre-Boardjo-an gidoNo ratings yet
- Criminaliyty Starts From HereDocument27 pagesCriminaliyty Starts From HereFerdous MostofaNo ratings yet