You might also like
- Vsa BasicsDocument20 pagesVsa BasicsRavikumar Gandla100% (2)
- Grades 1-12 Daily Lesson LogDocument5 pagesGrades 1-12 Daily Lesson LogMarlaFirmalino100% (2)
- Business Mathematics - Module 1.1 - Express Fractions To Decimal and Percent FormsDocument12 pagesBusiness Mathematics - Module 1.1 - Express Fractions To Decimal and Percent Formslea banting100% (1)
- Cylindrical and Spherical CoordinatesDocument33 pagesCylindrical and Spherical Coordinatessumi36117No ratings yet
- Advanced Approach To Play A Atari GameDocument6 pagesAdvanced Approach To Play A Atari GameInternational Journal of computational Engineering research (IJCER)No ratings yet
- Desafios para A Inteligência Artificial em Jogos DigitaisDocument13 pagesDesafios para A Inteligência Artificial em Jogos DigitaisIsabele RodriguesNo ratings yet
- Playing SNES in The Retro Learning EnvironmentDocument11 pagesPlaying SNES in The Retro Learning EnvironmentRanjanNo ratings yet
- ETNCC PaperDocument6 pagesETNCC PaperChirag ThakerNo ratings yet
- Ranjitha 2020 J. Phys. Conf. Ser. 1427 012006Document12 pagesRanjitha 2020 J. Phys. Conf. Ser. 1427 012006Nithya SukumarNo ratings yet
- Practical Game ArchitectureDocument7 pagesPractical Game ArchitectureMarkNo ratings yet
- Processes and tools for sound design in computer gamesDocument8 pagesProcesses and tools for sound design in computer gamesMonotusNo ratings yet
- A Game Logic Specification Proposal For 2 D VideogamesDocument11 pagesA Game Logic Specification Proposal For 2 D VideogamesgokhancantasNo ratings yet
- Player Preference and Style in A Leading Mobile Card GameDocument10 pagesPlayer Preference and Style in A Leading Mobile Card Game380301462jsyNo ratings yet
- Multi-Arcade Emulation System Project Plan: Group MembersDocument14 pagesMulti-Arcade Emulation System Project Plan: Group MembersMarvin ToeungNo ratings yet
- Gaming Console ArdiunoDocument8 pagesGaming Console ArdiunoTanay MauryaNo ratings yet
- DownloadDocument10 pagesDownloadPedro PazNo ratings yet
- APP ProjectDocument17 pagesAPP ProjectPRIYANSHU RAJ (RA2111003030015)No ratings yet
- Fin Irjmets1652543176Document5 pagesFin Irjmets1652543176Zakhan KimahNo ratings yet
- Openai Five: Defeat Dota 2 Restrictions The International Complex Train Prize PoolDocument18 pagesOpenai Five: Defeat Dota 2 Restrictions The International Complex Train Prize PoolMich FelloneNo ratings yet
- The Mechanics of the NES Game ConsoleDocument4 pagesThe Mechanics of the NES Game ConsoleJULIANA MARIE GABALLONo ratings yet
- Artificial Intelligence FinalDocument19 pagesArtificial Intelligence FinalRifai Ra's Al GhulNo ratings yet
- Arcade Pi Theme: Retro Digital GamesDocument12 pagesArcade Pi Theme: Retro Digital GamesIJAR JOURNALNo ratings yet
- othello solvedDocument14 pagesothello solvedOctave ColsonNo ratings yet
- Playstation Research PaperDocument7 pagesPlaystation Research Paperjyzapydigip3100% (1)
- Tic Tac Toe Documentation in Python 3 PDFDocument8 pagesTic Tac Toe Documentation in Python 3 PDFMighty gamingNo ratings yet
- Tic-Tac-Toe AI Project ProposalDocument17 pagesTic-Tac-Toe AI Project Proposalvisit4tehnicalNo ratings yet
- Thue Etal 2007Document6 pagesThue Etal 2007Chris InNottsNo ratings yet
- Tic-Tac-Toe Game Using Python PDFDocument5 pagesTic-Tac-Toe Game Using Python PDFvishva kansaraNo ratings yet
- Sony Computer Entertainment Inc. To Launch Its Next Generation Computer Entertainment SystemDocument7 pagesSony Computer Entertainment Inc. To Launch Its Next Generation Computer Entertainment Systemromi hendrixNo ratings yet
- Teknologi Ps 3Document7 pagesTeknologi Ps 3romi hendrixNo ratings yet
- Bentley 2019 AffordancesDocument5 pagesBentley 2019 Affordancesdiegohk20688No ratings yet
- Bogost Montfort HastacDocument14 pagesBogost Montfort Hastaclbarboza01No ratings yet
- Fdocuments - Us - Large Scale Analysis of Chess Games With Chess Engines Chess Games With ChessDocument19 pagesFdocuments - Us - Large Scale Analysis of Chess Games With Chess Engines Chess Games With ChessZakhan KimahNo ratings yet
- Shooting Game Using Unreal EngineDocument8 pagesShooting Game Using Unreal EngineIJRASETPublicationsNo ratings yet
- TOPIC NAME FaisalDocument12 pagesTOPIC NAME Faisalamankumar1409201No ratings yet
- The Chess Transformer: Mastering Play Using Generative Language ModelsDocument7 pagesThe Chess Transformer: Mastering Play Using Generative Language ModelsДіма ПуликNo ratings yet
- p195 KellyDocument8 pagesp195 KellyFacundo PuzziNo ratings yet
- Game AI Revisited2Document38 pagesGame AI Revisited2skyonNo ratings yet
- Tetris Development For AndroidDocument53 pagesTetris Development For AndroidPawar Prashant0% (2)
- Jkuilui Using Learning by Imitation: Dapeng Zhang, Zhongjie Cai, Bernhard NebelDocument6 pagesJkuilui Using Learning by Imitation: Dapeng Zhang, Zhongjie Cai, Bernhard Nebelpanos pNo ratings yet
- G J E S R: Lobal Ournal of Ngineering Cience and EsearchesDocument8 pagesG J E S R: Lobal Ournal of Ngineering Cience and EsearchesSangita HazraNo ratings yet
- Finding Comfortable Settings of Snake Game Using Game Refinement MeasurementDocument9 pagesFinding Comfortable Settings of Snake Game Using Game Refinement MeasurementAkshay ChowdaryNo ratings yet
- Activity2 Jgaballo 02012023Document4 pagesActivity2 Jgaballo 02012023JULIANA MARIE GABALLONo ratings yet
- Flat DraftDocument25 pagesFlat DraftVarshan ManishNo ratings yet
- Current State-Of-The-Art in Game EnginesDocument10 pagesCurrent State-Of-The-Art in Game EnginesChethaka Ḱḁṥṳṅṕṙḭẏḁ UduwarageNo ratings yet
- Week 4 Project - Adversarial Search and Games - CSMMDocument9 pagesWeek 4 Project - Adversarial Search and Games - CSMMRaj kumar manepallyNo ratings yet
- Learning Tetris by Imitating Human PlayersDocument6 pagesLearning Tetris by Imitating Human Playerspanos pNo ratings yet
- DeepStack: Expert-Level AI in No-Limit PokerDocument31 pagesDeepStack: Expert-Level AI in No-Limit Pokerthomas.j.johnson2691No ratings yet
- Jkuilui Using Learning by Imitation: Dapeng Zhang, Zhongjie Cai, Bernhard NebelDocument6 pagesJkuilui Using Learning by Imitation: Dapeng Zhang, Zhongjie Cai, Bernhard Nebelpanos pNo ratings yet
- AIDocument4 pagesAImounteverest276No ratings yet
- METODocument7 pagesMETOjoansalas1234No ratings yet
- AI in Video GamesDocument7 pagesAI in Video GamesPhantomNo ratings yet
- Visualisation of The Minority Game Using A Mod: Stewart G. Heckenberg, Ric D. Herbert and Richard WebberDocument7 pagesVisualisation of The Minority Game Using A Mod: Stewart G. Heckenberg, Ric D. Herbert and Richard Webberstewart_heckenbergNo ratings yet
- The Architecture and Evolution of Computer Game EnginesDocument34 pagesThe Architecture and Evolution of Computer Game EnginesEmilioMoranPilliguaNo ratings yet
- AlphaZeroCritique 01 00005 PDFDocument12 pagesAlphaZeroCritique 01 00005 PDFivoNo ratings yet
- Vidgam PDFDocument7 pagesVidgam PDFDelysid-25No ratings yet
- Deepstack AIDocument37 pagesDeepstack AIkscmainNo ratings yet
- Isola Game Master: Sibiya Babu Harshada Dhaigude Vaishnavi Adhav Submitted in Partial Fulfillment of The Requirements ofDocument5 pagesIsola Game Master: Sibiya Babu Harshada Dhaigude Vaishnavi Adhav Submitted in Partial Fulfillment of The Requirements ofPalash SarowareNo ratings yet
- Evolving and Discovering Tetris Gameplay StrategieDocument11 pagesEvolving and Discovering Tetris Gameplay StrategieJulio BispoNo ratings yet
- Game Consoles: A Look Ahead: Ace's HardwareDocument11 pagesGame Consoles: A Look Ahead: Ace's Hardwarexocegek194No ratings yet
- Playing The Interface: A Case Study of Grand Theft Auto: San AndreasDocument5 pagesPlaying The Interface: A Case Study of Grand Theft Auto: San AndreasChess NutsNo ratings yet
- Coursework1 4Document19 pagesCoursework1 4Santosh LamichhaneNo ratings yet
- Defining Game Mechanics: Miguel SicartDocument15 pagesDefining Game Mechanics: Miguel SicartGrudobranNo ratings yet
- Uttar Pradesh Kamdhenu Dairy Farm SchemeDocument6 pagesUttar Pradesh Kamdhenu Dairy Farm Schemesid raiNo ratings yet
- SId Resume Finaledit PDFDocument2 pagesSId Resume Finaledit PDFsid raiNo ratings yet
- Quantum ComputingDocument7 pagesQuantum Computingsid raiNo ratings yet
- SId Resume Finaledit PDFDocument2 pagesSId Resume Finaledit PDFsid raiNo ratings yet
- ICCR Endometrial Cancer Dataset 3rd EditionDocument18 pagesICCR Endometrial Cancer Dataset 3rd Editionsid raiNo ratings yet
- Story 1Document1 pageStory 1sid raiNo ratings yet
- ProfileDocument2 pagesProfilesid raiNo ratings yet
- Neuro - Evolutionary Model For Playing GamesDocument6 pagesNeuro - Evolutionary Model For Playing Gamessid raiNo ratings yet
- Uttar Pradesh Kamdhenu Dairy Farm SchemeDocument6 pagesUttar Pradesh Kamdhenu Dairy Farm Schemesid raiNo ratings yet
- Academic Qualifications Year Degree Institute Cgpa / PercentageDocument1 pageAcademic Qualifications Year Degree Institute Cgpa / Percentagesid raiNo ratings yet
- Uttar Pradesh Kamdhenu Dairy Farm SchemeDocument6 pagesUttar Pradesh Kamdhenu Dairy Farm Schemesid raiNo ratings yet
- Dimensionality - Reduction - Principal - Component - Analysis - Ipynb at Master Llsourcell - Dimensionality - Reduction GitHubDocument14 pagesDimensionality - Reduction - Principal - Component - Analysis - Ipynb at Master Llsourcell - Dimensionality - Reduction GitHubsid raiNo ratings yet
- Unit4/17 Chapter101Document12 pagesUnit4/17 Chapter101sid raiNo ratings yet
- Even Tree EnglishDocument2 pagesEven Tree Englishsid raiNo ratings yet
- My CVDocument3 pagesMy CVsid raiNo ratings yet
- Red Knights Shortest Path English PDFDocument2 pagesRed Knights Shortest Path English PDFsid raiNo ratings yet
- RELIANCE DIGITAL-MARKET Right One2Document15 pagesRELIANCE DIGITAL-MARKET Right One2Ram GuptaNo ratings yet
- Travel 5353Document1 pageTravel 5353sid raiNo ratings yet
- Travel 5353Document1 pageTravel 5353sid raiNo ratings yet
- Manage MPDocument5 pagesManage MPsid raiNo ratings yet
- A446685478 - 21976 - 2 - 2018 - Practice Questions1Document3 pagesA446685478 - 21976 - 2 - 2018 - Practice Questions1sid raiNo ratings yet
- Smart NotesDocument2 pagesSmart Notessid raiNo ratings yet
- Welcome To Javatpoint. C++ TutorialDocument1 pageWelcome To Javatpoint. C++ Tutorialsid raiNo ratings yet
- Manage HPDocument5 pagesManage HPsid raiNo ratings yet
- A1336701014 23590 21 2018 2 Practice Exercises For ExpressionsDocument1 pageA1336701014 23590 21 2018 2 Practice Exercises For Expressionssid raiNo ratings yet
- Test OutDocument11 pagesTest Outsid raiNo ratings yet
- A1336701014 23590 21 2018 2 Practice Exercises For ExpressionsDocument3 pagesA1336701014 23590 21 2018 2 Practice Exercises For Expressionssid raiNo ratings yet
- A1336701014 23590 21 2018 2 Practice Exercises For ExpressionsDocument3 pagesA1336701014 23590 21 2018 2 Practice Exercises For Expressionssid raiNo ratings yet
- CSE326: Web Programming LabDocument1 pageCSE326: Web Programming Labsid raiNo ratings yet
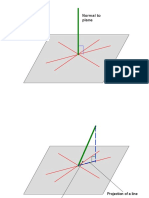
- Projecting Lines & Calculating Angles Between Planes & DiagonalsDocument8 pagesProjecting Lines & Calculating Angles Between Planes & DiagonalsDewan Olin ChotepadaeNo ratings yet
- High Strain Rate Testing Tension and Compression PDFDocument9 pagesHigh Strain Rate Testing Tension and Compression PDFBilal TayyabNo ratings yet
- PythagorasDocument1 pagePythagorassophiaNo ratings yet
- Linear Wave Shaping-Integrator and DifferentiatorDocument5 pagesLinear Wave Shaping-Integrator and DifferentiatorManjot Kaur0% (1)
- Thermodynamics 1.EE 2A Stem Midterms. LM 1Document11 pagesThermodynamics 1.EE 2A Stem Midterms. LM 1mery9jean9lasamNo ratings yet
- Study of Supersonic Flow in A Constant Rate of Momentum Change PDFDocument11 pagesStudy of Supersonic Flow in A Constant Rate of Momentum Change PDFVirendra KumarNo ratings yet
- NARAYANA IIT ACADEMY JR.IIT CO SUPER CHAINA & SUPER CHAINA N120/MAINS QP KEY & SOLUTIONDocument12 pagesNARAYANA IIT ACADEMY JR.IIT CO SUPER CHAINA & SUPER CHAINA N120/MAINS QP KEY & SOLUTIONYugandher BadanaNo ratings yet
- Introduction to Finite Element Analysis using ANSYSDocument40 pagesIntroduction to Finite Element Analysis using ANSYSFaruck GNo ratings yet
- Feedback — VIII. Neural Networks: Representation HelpDocument5 pagesFeedback — VIII. Neural Networks: Representation HelpChaitanya Kumar0% (1)
- SmartStudio User ManualDocument73 pagesSmartStudio User ManualAhmad GustoniNo ratings yet
- Strategic Management Process ExplainedDocument43 pagesStrategic Management Process ExplainedJohn Paul PrestonNo ratings yet
- College Essay - Anzo TehDocument2 pagesCollege Essay - Anzo TehElevenPlus ParentsNo ratings yet
- Multiuser MIMO Indoor Visible Light CommunicationsDocument150 pagesMultiuser MIMO Indoor Visible Light CommunicationsSubramaniyanNarayananNo ratings yet
- Normal Human Locomotion Part 1 and 2 Basic Concepts and Terminology 1Document20 pagesNormal Human Locomotion Part 1 and 2 Basic Concepts and Terminology 1Paulo FerreiraNo ratings yet
- UT Dallas Syllabus For Fin6381.001.09f Taught by Alain Bensoussan (Axb046100)Document4 pagesUT Dallas Syllabus For Fin6381.001.09f Taught by Alain Bensoussan (Axb046100)UT Dallas Provost's Technology GroupNo ratings yet
- Fig. P3.129, P3.130Document4 pagesFig. P3.129, P3.130Alen RustemovicNo ratings yet
- Practical-Booklet DensityDocument11 pagesPractical-Booklet DensitySamuel Tafara ManjeniNo ratings yet
- Unit 2 - NotesDocument52 pagesUnit 2 - NotesJohnsi JNo ratings yet
- Bayes' Theorem: Probability Theory StatisticsDocument9 pagesBayes' Theorem: Probability Theory StatisticsVanlal KhiangteNo ratings yet
- TQM Tools and TechniquesDocument39 pagesTQM Tools and TechniquesTharun Kumar U100% (1)
- Multiphase FlowDocument15 pagesMultiphase FlowvictorvikramNo ratings yet
- AI - Question BankDocument6 pagesAI - Question BankSARATH KUMAAR J SEC 2020No ratings yet
- IM Unit OverviewDocument1 pageIM Unit OverviewAheedam MohammedNo ratings yet
- Java - Awt.color Java - Util.random : Import ImportDocument12 pagesJava - Awt.color Java - Util.random : Import ImportJason SchroederNo ratings yet
- Stats Chap10Document63 pagesStats Chap10Sameh SalahNo ratings yet