You might also like
- Finite Element Analysis for Design Engineers, Second EditionFrom EverandFinite Element Analysis for Design Engineers, Second EditionNo ratings yet
- Content ServerDocument26 pagesContent Serverfoad8888No ratings yet
- Modelling and Analysis Lab Manual: (I Sem, M.E Manufacturing Engineering)Document178 pagesModelling and Analysis Lab Manual: (I Sem, M.E Manufacturing Engineering)M. Sadiq. A. PachapuriNo ratings yet
- BIW Design ProcessDocument9 pagesBIW Design Processprasungovindan100% (1)
- A Knowledge-Based Master Modeling Approach To System Analysis and DesignDocument10 pagesA Knowledge-Based Master Modeling Approach To System Analysis and DesignHeribertoNo ratings yet
- Evolutionary Multiobjective Optimization of A System-Level Motor Drive DesignDocument9 pagesEvolutionary Multiobjective Optimization of A System-Level Motor Drive Designthhluong.sdh232No ratings yet
- KBE Approach To Automotive StructureDocument10 pagesKBE Approach To Automotive StructureuratmerihNo ratings yet
- Scia Engineer MOOT 2011 ENGDocument8 pagesScia Engineer MOOT 2011 ENGConan EdogawaNo ratings yet
- Analog Circuit Optimization System Based On Hybrid Evolutionary AlgorithmsDocument12 pagesAnalog Circuit Optimization System Based On Hybrid Evolutionary AlgorithmsashishmanyanNo ratings yet
- Numerical Tools in Structural Optimization - Iass Iacm 2008Document4 pagesNumerical Tools in Structural Optimization - Iass Iacm 2008juancarrionmonsalveNo ratings yet
- An Evolutionary Approach For VLSI Standard Cell Design: 0-7803-7282-4/02/$10.00 ©2002 IEEEDocument6 pagesAn Evolutionary Approach For VLSI Standard Cell Design: 0-7803-7282-4/02/$10.00 ©2002 IEEEdattuh4No ratings yet
- An Abstracted and Effective Capabilities Portfolio Management Methodology Using Enterprise or System of Systems Level ArchitectureDocument20 pagesAn Abstracted and Effective Capabilities Portfolio Management Methodology Using Enterprise or System of Systems Level ArchitectureASSOURA BEH BRIST PASSINo ratings yet
- Rbtic ArmDocument18 pagesRbtic ArmmnervadesuNo ratings yet
- Integrated Design of Production Strategy and Reuse Scenario For Product Line DevelopmentDocument6 pagesIntegrated Design of Production Strategy and Reuse Scenario For Product Line DevelopmentRanga RajanNo ratings yet
- Power Transmissions DesignDocument18 pagesPower Transmissions DesignFabián AcevedoNo ratings yet
- Of of Is Nature Mass and To Minimize Stress. To So-To Tion of of AnDocument9 pagesOf of Is Nature Mass and To Minimize Stress. To So-To Tion of of AnMackinder Lijarza torresNo ratings yet
- Integrating Case-Based With Rule-Based Reasoning in Body-In-White Fixture DesignDocument18 pagesIntegrating Case-Based With Rule-Based Reasoning in Body-In-White Fixture DesignhivenewNo ratings yet
- Influence of The Binomial Crossover in TDocument8 pagesInfluence of The Binomial Crossover in Tgurrala pavankumarNo ratings yet
- 1 s2.0 S221282712300848X MainDocument6 pages1 s2.0 S221282712300848X MainAlexNicolaeNo ratings yet
- Measuring Innovation in Multi-Component Engineering SystemsDocument11 pagesMeasuring Innovation in Multi-Component Engineering SystemsMohammad ZandiNo ratings yet
- Unit-2 Sadp: N.Mounika Asst - Professor Dept of Cse UrceDocument26 pagesUnit-2 Sadp: N.Mounika Asst - Professor Dept of Cse UrcerosieNo ratings yet
- Multidisciplinary Design Optimization Method ApplDocument9 pagesMultidisciplinary Design Optimization Method Appljoojoo987654321No ratings yet
- Conceptual Ship Design Framework For Designing New Commercial ShipsDocument8 pagesConceptual Ship Design Framework For Designing New Commercial ShipsAhmed AdelNo ratings yet
- Chapter One 1. Fundamentals of Numerical Control: 1.1 Introduction To Computer Aided Design (CAD)Document24 pagesChapter One 1. Fundamentals of Numerical Control: 1.1 Introduction To Computer Aided Design (CAD)መሰረቴ ግርማይNo ratings yet
- Component Selection For Component Based Software EngineeringDocument6 pagesComponent Selection For Component Based Software EngineeringVinay Kumar SharmaNo ratings yet
- Computer-Aided Engineering (CAE) Is The Broad Usage of Computer Software To Aid inDocument6 pagesComputer-Aided Engineering (CAE) Is The Broad Usage of Computer Software To Aid inamazon webserviceNo ratings yet
- Amendment in Strategic Cost Management & Performance Evaluation (Scmpe) For May 2022Document9 pagesAmendment in Strategic Cost Management & Performance Evaluation (Scmpe) For May 2022Sudam NishithaNo ratings yet
- Design Optimization MSD Final PDFDocument16 pagesDesign Optimization MSD Final PDFChinmay LearningNo ratings yet
- Generation of Functional Tolerancing Based On Positioning FeaturesDocument18 pagesGeneration of Functional Tolerancing Based On Positioning FeatureshalackNo ratings yet
- Modeling and Simulation of EV HEV PDFDocument17 pagesModeling and Simulation of EV HEV PDFshawn liNo ratings yet
- Axiomatic Product Development LifecycleDocument4 pagesAxiomatic Product Development LifecyclegschiroNo ratings yet
- Multi Objective Optimization of A Vehicle Body by Combining Gradient Based Methods and Vehicle Concept ModellingDocument8 pagesMulti Objective Optimization of A Vehicle Body by Combining Gradient Based Methods and Vehicle Concept Modellingreek_bhatNo ratings yet
- Tablas ElectreDocument26 pagesTablas ElectreRodger SalazarNo ratings yet
- EKAW99Document15 pagesEKAW99Perry GrootNo ratings yet
- Application of A Reconfiguration Methodology For Multiple Assembly System ReconfigurationsDocument8 pagesApplication of A Reconfiguration Methodology For Multiple Assembly System ReconfigurationsAvinash KumarNo ratings yet
- Transactions of The VŠB - Technical University of Ostrava: 10.1515/tvsb-2015-0015Document10 pagesTransactions of The VŠB - Technical University of Ostrava: 10.1515/tvsb-2015-0015KassemDeebNo ratings yet
- Multi-Objective Approaches For Design of Assembly LinesDocument27 pagesMulti-Objective Approaches For Design of Assembly LinesAvinash KumarNo ratings yet
- Finite Elements in Analysis and Design: D. Mundo, R. Hadjit, S. Donders, M. Brughmans, P. Mas, W. DesmetDocument7 pagesFinite Elements in Analysis and Design: D. Mundo, R. Hadjit, S. Donders, M. Brughmans, P. Mas, W. DesmethivenewNo ratings yet
- A Global Optimization Model For Ship DesignDocument18 pagesA Global Optimization Model For Ship Designlucas poloNo ratings yet
- FinalPaperMacros in Catia To Read Values From MS Excel - A Tool For Automation170895Document6 pagesFinalPaperMacros in Catia To Read Values From MS Excel - A Tool For Automation170895zarasettNo ratings yet
- Article MechanismMachineTheory Budinger PDFDocument17 pagesArticle MechanismMachineTheory Budinger PDFfei312chenNo ratings yet
- Basic of Dynamic Simulation Auto Desk InventorDocument24 pagesBasic of Dynamic Simulation Auto Desk Inventorranganathan0818No ratings yet
- Virtual Approach To Ground Armoured Vehicles Design: Advances in Military Technology Vol. 4, No. 2, December 2009Document14 pagesVirtual Approach To Ground Armoured Vehicles Design: Advances in Military Technology Vol. 4, No. 2, December 2009PrashantNo ratings yet
- Structural Optimization in CAD SoftwareDocument10 pagesStructural Optimization in CAD SoftwareRenato Fuentealba AravenaNo ratings yet
- FV WikiDocument19 pagesFV Wikikundan1991No ratings yet
- Hugues 4963Document16 pagesHugues 4963mariam.bejiNo ratings yet
- How To Assess Biw Structures From The Fatigue Point of ViewDocument15 pagesHow To Assess Biw Structures From The Fatigue Point of ViewKIRANNo ratings yet
- 1 s2.0 S0045790623002276 MainDocument22 pages1 s2.0 S0045790623002276 MainRayan ElazzabiNo ratings yet
- Parametric Design Methods For Car Body Design: January 2001Document10 pagesParametric Design Methods For Car Body Design: January 2001subhrajit.omNo ratings yet
- FE Vol.2 CH 4 Old Question For Student (Answer)Document34 pagesFE Vol.2 CH 4 Old Question For Student (Answer)htetpaing1709No ratings yet
- Mechanisms of Persistent Identification of Topological Entities in CAD Systems - A Review - ScienceDirectDocument28 pagesMechanisms of Persistent Identification of Topological Entities in CAD Systems - A Review - ScienceDirectXiang ZhangNo ratings yet
- Cad Paramtuning SurveyDocument6 pagesCad Paramtuning SurveyJack LuarNo ratings yet
- CAE 69-76 Landschuetzer 02Document8 pagesCAE 69-76 Landschuetzer 02Insannul HakimNo ratings yet
- OASIcs iPMVM 2020 6Document18 pagesOASIcs iPMVM 2020 6Kakashi ZXNo ratings yet
- Parametric Reconfiguration Improvement in Non-Iterative Concurrent Mechatronic Design Using An Evolutionary-Based ApproachDocument15 pagesParametric Reconfiguration Improvement in Non-Iterative Concurrent Mechatronic Design Using An Evolutionary-Based ApproachIng. Omar SerranoNo ratings yet
- Automation of Design Process Using Etabs, Microsoft Excel and AutoCADDocument13 pagesAutomation of Design Process Using Etabs, Microsoft Excel and AutoCADakhilesh120No ratings yet
- Feature Based Interoperability Between DDocument16 pagesFeature Based Interoperability Between DBAMOUROU SANOGONo ratings yet
- Art 20174805Document11 pagesArt 20174805aymenNo ratings yet
- Unit-3 Chapter-1,2,3 Full NotesDocument12 pagesUnit-3 Chapter-1,2,3 Full NotesvijayalaxmibindlaNo ratings yet
- AIAA - 2010 - Malak - Galvan ManuscriptDocument25 pagesAIAA - 2010 - Malak - Galvan Manuscripte_galvanNo ratings yet
- Expert KnowledgeDocument43 pagesExpert Knowledgegshock65No ratings yet
- Sponsorship Proposal For The SAE Aero Design Series Team of The Polytechnic University of Puerto RicoDocument9 pagesSponsorship Proposal For The SAE Aero Design Series Team of The Polytechnic University of Puerto Ricogshock65No ratings yet
- Ember Aviation LAT-1: Presents TheDocument94 pagesEmber Aviation LAT-1: Presents Thegshock65No ratings yet
- EDU CAT EN VBA AI V5R19 Toprint PDFDocument174 pagesEDU CAT EN VBA AI V5R19 Toprint PDFcaddsoftNo ratings yet
- Glossary Financial Forecasting With Big DataDocument1 pageGlossary Financial Forecasting With Big Datagshock65No ratings yet
- Presentation1 111013092023 Phpapp02Document13 pagesPresentation1 111013092023 Phpapp02gshock65No ratings yet
- Buy Aaotokk Sae y Splitter Adapter Cable 18awg Sae 2 Way Adapter 1 To 2 Sae y Splitter Sae DC Power 210126145526Document49 pagesBuy Aaotokk Sae y Splitter Adapter Cable 18awg Sae 2 Way Adapter 1 To 2 Sae y Splitter Sae DC Power 210126145526gshock65No ratings yet
- 2016 Collegiate Design Series: SAE Aero Design East and WestDocument59 pages2016 Collegiate Design Series: SAE Aero Design East and Westgshock65No ratings yet
- Occupant Package Design Project-Sanjiv ValsanDocument24 pagesOccupant Package Design Project-Sanjiv Valsangshock65100% (1)
- SAE 2009 NVH Conference Structure Borne NVH Workshop: Alan Duncan Greg Goetchius Jianmin GuanDocument80 pagesSAE 2009 NVH Conference Structure Borne NVH Workshop: Alan Duncan Greg Goetchius Jianmin Guangshock65No ratings yet
- Presentation1 111013092023 Phpapp02Document13 pagesPresentation1 111013092023 Phpapp02gshock65No ratings yet
- Fsae Supra Vehicle: Minor Project Presentation ONDocument38 pagesFsae Supra Vehicle: Minor Project Presentation ONgshock65No ratings yet
- Hannstar Product Specification: Model: Hsd103Kpw2 - A10 10.25" Color TFT-LCD ModuleDocument26 pagesHannstar Product Specification: Model: Hsd103Kpw2 - A10 10.25" Color TFT-LCD Modulegshock65No ratings yet
- FDMI™ Standard: Version 1, Rev. 1 January 16, 2006Document72 pagesFDMI™ Standard: Version 1, Rev. 1 January 16, 2006gshock65No ratings yet
- Model No.: Dj080Ia Suffix: 11A: Product SpecificationDocument26 pagesModel No.: Dj080Ia Suffix: 11A: Product Specificationgshock65No ratings yet
- LEONI Dacar® 110 enDocument1 pageLEONI Dacar® 110 engshock65No ratings yet
- Using Simulation Driven Design and Optimizations To Increase ProductivityDocument11 pagesUsing Simulation Driven Design and Optimizations To Increase Productivitygshock65No ratings yet
- LEONI Dacar® 110 enDocument1 pageLEONI Dacar® 110 engshock65No ratings yet
- Basicergonomicsinautomotivedesign 160105161245Document92 pagesBasicergonomicsinautomotivedesign 160105161245gshock65No ratings yet
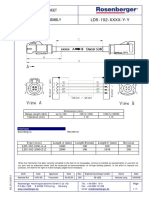
- LD5 102 XXXX y yDocument2 pagesLD5 102 XXXX y ygshock65No ratings yet
- DatumAxis 5Document7 pagesDatumAxis 5Anonymous 7ZTcBnNo ratings yet
- Expert KnowledgeDocument43 pagesExpert KnowledgeSubathra SuseendranNo ratings yet
- Higgins 95Document7 pagesHiggins 95gshock65No ratings yet
- 02 COMSOL-MATLAB LiveLink Wenger Engineering Paper COMSOL Conference 2011Document5 pages02 COMSOL-MATLAB LiveLink Wenger Engineering Paper COMSOL Conference 2011AliOucharNo ratings yet
- Evolutionary Algorithms ClassificationDocument5 pagesEvolutionary Algorithms ClassificationBT KrishnaNo ratings yet
- Ali Ahmadian (Editor), Soheil Salahshour (Editor) - Soft Computing Approach For Mathematical Modeling of Engineering Problems-CRC Press (2021)Document267 pagesAli Ahmadian (Editor), Soheil Salahshour (Editor) - Soft Computing Approach For Mathematical Modeling of Engineering Problems-CRC Press (2021)kelbmuts100% (1)
- Evolutionary Algorithms PDFDocument2 pagesEvolutionary Algorithms PDFAdamNo ratings yet
- Nature Inspired OptimizationDocument33 pagesNature Inspired Optimizationjason connorNo ratings yet
- Unconventional Programming Paradigms 2004Document226 pagesUnconventional Programming Paradigms 2004Yopghm698No ratings yet
- Putation 1 Basic Algorithms and Operators by Thomas BackDocument379 pagesPutation 1 Basic Algorithms and Operators by Thomas BackCarlos Delgado100% (2)
- Ea - A Critical Review and Its Futures ProspectsDocument5 pagesEa - A Critical Review and Its Futures Prospectsbatata batataNo ratings yet
- Soft Computing Unit-5 by Arun Pratap SinghDocument78 pagesSoft Computing Unit-5 by Arun Pratap SinghArunPratapSingh100% (1)
- Design Optimization of Electrical Transformer Using Genetic Algorithm Phaengkieo2014Document5 pagesDesign Optimization of Electrical Transformer Using Genetic Algorithm Phaengkieo2014Beurus SamaNo ratings yet
- SlidesDocument46 pagesSlidesPulak Naskar100% (1)
- 18.hybrid Intelligent Android Malware Detection Using Evolving Support Vector Machine Based On Genetic Algorithm and Particle Swarm OptimizationDocument15 pages18.hybrid Intelligent Android Malware Detection Using Evolving Support Vector Machine Based On Genetic Algorithm and Particle Swarm Optimizationziklonn xNo ratings yet
- Final Report Artificial Intelligence in Civil Engineering (8257)Document45 pagesFinal Report Artificial Intelligence in Civil Engineering (8257)050 Syed EhsaanNo ratings yet
- Fundamentals of Genetic AlgorithmDocument42 pagesFundamentals of Genetic AlgorithmKartikeya Sharma100% (1)
- Journal of Network and Computer Applications: Maumita Bhattacharya, Ra Fiqul Islam, Jemal AbawajyDocument11 pagesJournal of Network and Computer Applications: Maumita Bhattacharya, Ra Fiqul Islam, Jemal Abawajyregarcia81No ratings yet
- A2S2 - PEAG - en - Fisa Disciplinei - Programare Evolutiva Si Algoritmi Genetici 2016Document5 pagesA2S2 - PEAG - en - Fisa Disciplinei - Programare Evolutiva Si Algoritmi Genetici 2016Harabagiu AlexandruNo ratings yet
- R204104RDocument14 pagesR204104RgokulsaivarmakNo ratings yet
- Machine Learning For Evolution Strategies by Oliver Kramer (Auth.)Document120 pagesMachine Learning For Evolution Strategies by Oliver Kramer (Auth.)The ArchivistNo ratings yet
- Breeding Aesthetic Objects: Art and Artificial Evolution: Mitchell WhitelawDocument6 pagesBreeding Aesthetic Objects: Art and Artificial Evolution: Mitchell WhitelawAnonymous CjcDVK54No ratings yet
- A Many-Objective Evolutionary Algorithm Based On Novel Fitness Estimation and Grouping LayeringDocument32 pagesA Many-Objective Evolutionary Algorithm Based On Novel Fitness Estimation and Grouping LayeringMahdi HERMASSINo ratings yet
- Genetic AI: Technical ReportDocument18 pagesGenetic AI: Technical ReportJGalt1646No ratings yet
- Modern Optimization With R Use R 2nd Ed 2021 3030728188 9783030728182 - CompressDocument264 pagesModern Optimization With R Use R 2nd Ed 2021 3030728188 9783030728182 - CompresskarenNo ratings yet
- 274 - Soft Computing LECTURE NOTESDocument114 pages274 - Soft Computing LECTURE NOTESpooja shivaleNo ratings yet
- Evolutionary AlgorithmsDocument43 pagesEvolutionary Algorithmsneena joiceNo ratings yet
- CAD-based Evolutionary Design Optimization With Catia V5: Oliver K Onig, Marc WintermantelDocument30 pagesCAD-based Evolutionary Design Optimization With Catia V5: Oliver K Onig, Marc Wintermantelgshock65No ratings yet
- Mathematical and Statistical Applications in Food - 2020Document443 pagesMathematical and Statistical Applications in Food - 2020JOSE DAVID TORRES GONZALEZ100% (4)
- Topoplogy Optimization in Concrete ConstructionDocument25 pagesTopoplogy Optimization in Concrete ConstructionSam SevenNo ratings yet
- Evolutionary AlgorithmDocument11 pagesEvolutionary Algorithmjoseph458No ratings yet
- An Improved Grey Wolf Optimizer For Solving Engineering ProblemsDocument25 pagesAn Improved Grey Wolf Optimizer For Solving Engineering ProblemsSD Negeri Jugosari 3No ratings yet