You might also like
- ARPM Handbook Rev April 2015 PDFDocument194 pagesARPM Handbook Rev April 2015 PDFKavir RamdassNo ratings yet
- BBMP1103 Mathematics For ManagementDocument201 pagesBBMP1103 Mathematics For ManagementezzatuL77% (13)
- Triple PendulumDocument9 pagesTriple PendulumSalvador SilveyraNo ratings yet
- Argumentation Theory - PresentationDocument67 pagesArgumentation Theory - PresentationRoxana Burlica100% (1)
- Coefficient of Friction - PLASTIC On STEELDocument1 pageCoefficient of Friction - PLASTIC On STEELScooby DooNo ratings yet
- 6F35 - 6F55 Installation Guide: Read This Entire Document Before Installing Your TransmissionDocument8 pages6F35 - 6F55 Installation Guide: Read This Entire Document Before Installing Your TransmissionPedro Isai Vega100% (2)
- Random VibrationsDocument20 pagesRandom VibrationsVivek Pandey100% (1)
- Lagrange Equations: Use Kinetic and Potential Energy To Solve For Motion!Document32 pagesLagrange Equations: Use Kinetic and Potential Energy To Solve For Motion!Ribal KhreisNo ratings yet
- Lagrangian MechanicsDocument15 pagesLagrangian Mechanicsrr1819100% (1)
- 4 Lagrange's EquationsDocument10 pages4 Lagrange's EquationsMariam Mughees0% (1)
- Angular Momentum PDFDocument14 pagesAngular Momentum PDFManuel ChacónNo ratings yet
- Class: Xi: Unit-IV: Chapter-7: System of Particles and Rotational MotionDocument11 pagesClass: Xi: Unit-IV: Chapter-7: System of Particles and Rotational MotionSuyash RoyNo ratings yet
- Lecture Dynamics PDFDocument234 pagesLecture Dynamics PDFAnkan PalNo ratings yet
- Lectures On Classical Mechanics-2Document2 pagesLectures On Classical Mechanics-2Abhijit Kar Gupta100% (1)
- Chapter 16 Planar Kinematics of Rigid BodyDocument52 pagesChapter 16 Planar Kinematics of Rigid BodyMuhd HaqimNo ratings yet
- Angular MomentumDocument10 pagesAngular MomentumKlarence Medel PacerNo ratings yet
- Dynamics Unit - 3 Relative Motion With SolutionsDocument12 pagesDynamics Unit - 3 Relative Motion With SolutionsAl Chemist ShahedNo ratings yet
- Classical 5 PDFDocument22 pagesClassical 5 PDFAthiraTJNo ratings yet
- MIT2 003SCF11 Pset9 SolDocument10 pagesMIT2 003SCF11 Pset9 SolDasaka BrahmendraNo ratings yet
- Rotating PendulumDocument12 pagesRotating Pendulumjerome meccaNo ratings yet
- Conservation of MomentumDocument2 pagesConservation of MomentumwolfretonmathsNo ratings yet
- Vibration MDOF Analytical MethodDocument5 pagesVibration MDOF Analytical Methodvickyflyer1No ratings yet
- Work, Power Energy Q&ADocument93 pagesWork, Power Energy Q&ADebalina DassNo ratings yet
- Vibration: (BDA31103) Multi-Degree of FreedomDocument65 pagesVibration: (BDA31103) Multi-Degree of FreedomhildaNo ratings yet
- CH 4 - The Vibrations of Systems Having TDOFDocument17 pagesCH 4 - The Vibrations of Systems Having TDOFEmad ElsaidNo ratings yet
- Holonomic and Nonholonomic ConstraintsDocument20 pagesHolonomic and Nonholonomic Constraintsoltinn0% (1)
- 27-11 Mechanical Vibration (ME)Document3 pages27-11 Mechanical Vibration (ME)Mahir MahmoodNo ratings yet
- Chap1 WaldronDocument7 pagesChap1 WaldronEmmanuel Olguin CallejasNo ratings yet
- Lagrange PointsDocument4 pagesLagrange Pointsjas dwanNo ratings yet
- Physics Outreach Program Physics Olympiad Preparation 2012-2013Document2 pagesPhysics Outreach Program Physics Olympiad Preparation 2012-2013anand22233No ratings yet
- Mass Moment InertiaDocument7 pagesMass Moment InertiaAlessio ScarabelliNo ratings yet
- Center of Mass.Document130 pagesCenter of Mass.TammanurRavi100% (1)
- Relative Motion of ProjectilesDocument13 pagesRelative Motion of Projectilesumapavani0% (1)
- Lagrangian Formulation (Part 1)Document11 pagesLagrangian Formulation (Part 1)Myself GamerNo ratings yet
- 2 Moment of InertiaDocument13 pages2 Moment of InertiaIoannis GaroufalidisNo ratings yet
- Mechanical Vibration - MSD - Part 2Document9 pagesMechanical Vibration - MSD - Part 2Mohammad Saad Salim100% (1)
- Selvam College of Technology, Namakkal - 03 PH: 9942099122: 2 Marks Question & Answers Unit - I Basics of MechanismsDocument30 pagesSelvam College of Technology, Namakkal - 03 PH: 9942099122: 2 Marks Question & Answers Unit - I Basics of MechanismsVijayan GopalsamyNo ratings yet
- Me6603 Fea - 2 MarksDocument15 pagesMe6603 Fea - 2 MarksPrabha KaranNo ratings yet
- Engineering Mechanics Notes2222Document100 pagesEngineering Mechanics Notes2222rajasekharjvNo ratings yet
- Hamiltonian PDFDocument64 pagesHamiltonian PDFAnnaNo ratings yet
- 2D Rigid Body Dynamics Work and EnergyDocument6 pages2D Rigid Body Dynamics Work and Energyjehan11No ratings yet
- System of Particles & Rotational Motion: Chapter - 00Document32 pagesSystem of Particles & Rotational Motion: Chapter - 00Raichal P BijuNo ratings yet
- The Lagrangian MethodDocument15 pagesThe Lagrangian MethodОгњен Гроздановић100% (1)
- PHY 105 Waves and Oscillation PDFDocument147 pagesPHY 105 Waves and Oscillation PDFGlitchNo ratings yet
- Lecture 1 Plasma Physics PDFDocument11 pagesLecture 1 Plasma Physics PDFRobiul Islam RobiNo ratings yet
- Where Do Students "Go Wrong" When Solving Newton's Second Law ProblemsDocument19 pagesWhere Do Students "Go Wrong" When Solving Newton's Second Law ProblemsIgnacio RoccoNo ratings yet
- Mechanical Vibrations: Why Do We Study ?Document27 pagesMechanical Vibrations: Why Do We Study ?sagar kumarNo ratings yet
- Conservation Laws and Energy TransformationsDocument7 pagesConservation Laws and Energy TransformationsNikos KechagiasNo ratings yet
- Basic of KinematicsDocument12 pagesBasic of Kinematicssathya_jb100% (1)
- 16 - Central Force Motion PDFDocument21 pages16 - Central Force Motion PDFUltrazordNo ratings yet
- Position Analysis IntroductionDocument5 pagesPosition Analysis Introductionmuddassir razzaqNo ratings yet
- PresentationDocument13 pagesPresentationselva_raj215414No ratings yet
- Coriolis ForceDocument9 pagesCoriolis ForceMatthew WongNo ratings yet
- Kinematics of MachineryDocument65 pagesKinematics of Machinerykumaravel07No ratings yet
- Vibration Isolation and Force Transmissibility - 6Document50 pagesVibration Isolation and Force Transmissibility - 6Jay PrasathNo ratings yet
- Introduction - Forces, Equilibrium: Chapter HighlightsDocument87 pagesIntroduction - Forces, Equilibrium: Chapter HighlightsJagannath MandalNo ratings yet
- VectorsDocument55 pagesVectorsGeofrey KanenoNo ratings yet
- 2D Motion of A Particle Using Plan-Polar Coordinates: Velocity ComponentsDocument71 pages2D Motion of A Particle Using Plan-Polar Coordinates: Velocity Componentssharwan sharmaNo ratings yet
- A Collection of Problems on Mathematical Physics: International Series of Monographs in Pure and Applied MathematicsFrom EverandA Collection of Problems on Mathematical Physics: International Series of Monographs in Pure and Applied MathematicsNo ratings yet
- Differential Transformation Method for Mechanical Engineering ProblemsFrom EverandDifferential Transformation Method for Mechanical Engineering ProblemsNo ratings yet
- Nonlinear Dynamic in Engineering by Akbari-Ganji’S MethodFrom EverandNonlinear Dynamic in Engineering by Akbari-Ganji’S MethodNo ratings yet
- Differential Equations: Stability, Oscillations, Time LagsFrom EverandDifferential Equations: Stability, Oscillations, Time LagsRating: 5 out of 5 stars5/5 (1)
- Ordinary Differential Equations: 1971 NRL—MRC ConferenceFrom EverandOrdinary Differential Equations: 1971 NRL—MRC ConferenceLeonard WeissNo ratings yet
- Weibull Tutorial 2Document6 pagesWeibull Tutorial 2Gthulasi78No ratings yet
- BLDC 2Document4 pagesBLDC 2Gthulasi78No ratings yet
- BLDC 2Document4 pagesBLDC 2Gthulasi78No ratings yet
- Weibull Tutorial 1Document5 pagesWeibull Tutorial 1Gthulasi78No ratings yet
- Synchronous PM Motors: Stator Field Needs To Be Close To Orthogonal (90°) To Rotor Field To GetDocument4 pagesSynchronous PM Motors: Stator Field Needs To Be Close To Orthogonal (90°) To Rotor Field To GetGthulasi78No ratings yet
- Brushless DC Motors Are A Type of Synchronous MotorDocument5 pagesBrushless DC Motors Are A Type of Synchronous MotorGthulasi78No ratings yet
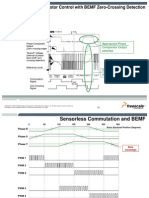
- Sensorless BLDC Motor Control With BEMF Zero-Crossing DetectionDocument6 pagesSensorless BLDC Motor Control With BEMF Zero-Crossing DetectionGthulasi78No ratings yet
- Reliability Prediction 1Document6 pagesReliability Prediction 1Gthulasi78No ratings yet
- BLDC - 2 Of3Document5 pagesBLDC - 2 Of3Gthulasi78No ratings yet
- Engine Dynamic Properties - 7Document3 pagesEngine Dynamic Properties - 7Gthulasi78No ratings yet
- Engine Dynamic Properties - 6Document5 pagesEngine Dynamic Properties - 6Gthulasi78No ratings yet
- Engine Dynamic Properties - 1Document5 pagesEngine Dynamic Properties - 1Gthulasi78No ratings yet
- Basics of A Electric Motor: Dcmotor 1Document10 pagesBasics of A Electric Motor: Dcmotor 1Gthulasi78No ratings yet
- Hybrid Car TechnologyDocument5 pagesHybrid Car TechnologyGthulasi78No ratings yet
- Ref Dr. A. Tolga Bozdana Notes Over The NetDocument5 pagesRef Dr. A. Tolga Bozdana Notes Over The NetGthulasi78No ratings yet
- Voltage Source Inverter - 1Document7 pagesVoltage Source Inverter - 1Gthulasi78No ratings yet
- E-Coating Process FinalDocument3 pagesE-Coating Process FinalGthulasi78No ratings yet
- Engine Dynamic Properties-3Document5 pagesEngine Dynamic Properties-3Gthulasi78No ratings yet
- Operation: Marine Generator SetsDocument152 pagesOperation: Marine Generator Setsabduallah muhammad100% (1)
- Trans Aubf Lec13Document5 pagesTrans Aubf Lec13USLT- Angoluan, Andrei T.No ratings yet
- PuTTY ServerDocument2 pagesPuTTY ServerenockkaysNo ratings yet
- CRM 146RDocument92 pagesCRM 146RRodrigo FrancisconNo ratings yet
- Process Control: Design ProjectDocument4 pagesProcess Control: Design Projectds2228No ratings yet
- PLCC-28: FeaturesDocument5 pagesPLCC-28: Features肖磊No ratings yet
- Additives For High Solids and Water-Borne CoatingsDocument12 pagesAdditives For High Solids and Water-Borne CoatingsWIlliam CheungNo ratings yet
- 2D CAD Data ListDocument809 pages2D CAD Data ListDesign IPGENo ratings yet
- An Unsupervised Based Stochastic Parallel Gradient Descent For FCM Learning Algorithm With Feature Selection For Big DataDocument5 pagesAn Unsupervised Based Stochastic Parallel Gradient Descent For FCM Learning Algorithm With Feature Selection For Big DataEditor IJRITCCNo ratings yet
- Chapter 3st Extension GTDocument10 pagesChapter 3st Extension GTJadeNo ratings yet
- Ece III Network Analysis (10es34) NotesDocument111 pagesEce III Network Analysis (10es34) NotesGautam Sharma80% (10)
- Journal of ManagementDocument121 pagesJournal of ManagementahaleemslNo ratings yet
- Ansys Workbench 13: Theory - Applications - Case StudiesDocument4 pagesAnsys Workbench 13: Theory - Applications - Case StudiesamodpanthiNo ratings yet
- Laboratory Procedure Manual: N Telopeptide in Urine Urine Vitros ImmunoassayDocument14 pagesLaboratory Procedure Manual: N Telopeptide in Urine Urine Vitros ImmunoassayNoon NabeelNo ratings yet
- Binary SearchDocument16 pagesBinary SearchPubg oneNo ratings yet
- Chemistry Form 4 Mid-Term ExamDocument7 pagesChemistry Form 4 Mid-Term ExamsanusiNo ratings yet
- P960 Section 4 Propulsion SystemsDocument43 pagesP960 Section 4 Propulsion SystemsLaurentiu DumitracheNo ratings yet
- A Flight Simulator For Everybody: AeroflyDocument17 pagesA Flight Simulator For Everybody: Aeroflyalbix58No ratings yet
- Liquid Propellant RocketDocument9 pagesLiquid Propellant Rocketramon_portillo_nd_64No ratings yet
- Xii 1 - Brochure Sihi LPHX 45008 45311 45316Document16 pagesXii 1 - Brochure Sihi LPHX 45008 45311 45316Usri AdiNo ratings yet
- Motorola Xts3000 Model II LTD Keypad User ManualDocument83 pagesMotorola Xts3000 Model II LTD Keypad User ManualRogerNo ratings yet
- The Power of PranaDocument2 pagesThe Power of PranaRian CarvalhoNo ratings yet
- Decision Support System For A Jewellery ManufacturerDocument9 pagesDecision Support System For A Jewellery Manufacturerpriyaagarwal26No ratings yet
- Sciencedirect: Musaida M. Manyuchi, C. Mbohwa, Edison Muzenda Musaida M. Manyuchi, C. Mbohwa, Edison MuzendaDocument6 pagesSciencedirect: Musaida M. Manyuchi, C. Mbohwa, Edison Muzenda Musaida M. Manyuchi, C. Mbohwa, Edison MuzendaJoshua Ng BundokNo ratings yet
- Brochure - Valves For Chemical and Petrochemical Processes (EN) .Document58 pagesBrochure - Valves For Chemical and Petrochemical Processes (EN) .Valmet Flow WANo ratings yet