You might also like
- EX03-AASTMT MagnificentVortexBee TechnicalDocumentation 2022Document25 pagesEX03-AASTMT MagnificentVortexBee TechnicalDocumentation 2022Abdalrhman MahmoudNo ratings yet
- Manual See Electrical BuildingDocument90 pagesManual See Electrical BuildingSlobodan SavicNo ratings yet
- Performance Based Earthquake Design of Four Storey RC BuildingDocument57 pagesPerformance Based Earthquake Design of Four Storey RC Buildingsabareesan09No ratings yet
- WIPL-D Validates Babinet PDFDocument3 pagesWIPL-D Validates Babinet PDFOlga Joy Labajo GerastaNo ratings yet
- Project 03: September 29thDocument12 pagesProject 03: September 29thadonisotopeNo ratings yet
- Firestone Workflows Support Problem Solving Abaqus 6 07 FDocument2 pagesFirestone Workflows Support Problem Solving Abaqus 6 07 FSameh MlaebNo ratings yet
- Student ProjectDocument10 pagesStudent ProjectMustafa KocNo ratings yet
- Touch Shoring 2Document15 pagesTouch Shoring 2Taztika Audea PutriNo ratings yet
- Mech 313 Project 2 Report Smith Schiele Antoniello FreytagDocument13 pagesMech 313 Project 2 Report Smith Schiele Antoniello Freytagapi-568978327No ratings yet
- SE Objective Q Bank U - I & IIDocument13 pagesSE Objective Q Bank U - I & IIpeddaboina yamuna ramNo ratings yet
- ETABS - To Start OffDocument15 pagesETABS - To Start OffChai Weng KuakNo ratings yet
- RBF Morph Tutorial 07Document50 pagesRBF Morph Tutorial 07singourNo ratings yet
- PLAXIS CONNECT Edition V21.01 - Tutorial Manual - Construction of a road embankment ADV - Excavation and dewateringDocument5 pagesPLAXIS CONNECT Edition V21.01 - Tutorial Manual - Construction of a road embankment ADV - Excavation and dewateringjayawiadnyanaNo ratings yet
- Chapter 4Document11 pagesChapter 4Mulat TemesgenNo ratings yet
- Exercise # 2 Building A 2D Land Model: Files RequiredDocument18 pagesExercise # 2 Building A 2D Land Model: Files RequiredPelangi Nadira ArifatunnisaNo ratings yet
- Industrial Training: UX Design/DevelopmentDocument16 pagesIndustrial Training: UX Design/Developmentshridhar sharmaNo ratings yet
- PB Preventative Maintenance 2 EN 0015Document8 pagesPB Preventative Maintenance 2 EN 0015ClaudiNo ratings yet
- Pilecap Design in SAFEDocument6 pagesPilecap Design in SAFEAamirShabbirNo ratings yet
- Quadcopter Design DocumentDocument23 pagesQuadcopter Design Documentapi-556772195No ratings yet
- Final Cad Cam B BatchDocument43 pagesFinal Cad Cam B BatchSubodh DanaoNo ratings yet
- Auto Cad JoshuDocument15 pagesAuto Cad Joshuvaibhav mhaseNo ratings yet
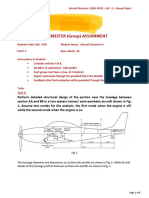
- Aircraft Structure II - Group ProjectDocument6 pagesAircraft Structure II - Group ProjectAlaa Eldin MalikNo ratings yet
- Avaj Launcher: Enter The Java PathDocument13 pagesAvaj Launcher: Enter The Java PathTsepo ShataNo ratings yet
- AfgsdfhgDocument3 pagesAfgsdfhgBogie shopNo ratings yet
- Complex Fault Modeling with False FaultsDocument6 pagesComplex Fault Modeling with False FaultsAiwarikiaarNo ratings yet
- CATIA - Assembly Modeling ExercisesDocument28 pagesCATIA - Assembly Modeling ExercisesTech Tutorials by TEJNo ratings yet
- BOrIS Touchscreen Interface Simplifies Bottle OrientationDocument72 pagesBOrIS Touchscreen Interface Simplifies Bottle Orientationshubham yadavNo ratings yet
- Hitachi Assembly MethodDocument24 pagesHitachi Assembly MethodVishalNaranjeNo ratings yet
- University Institute of Engineering & Technology Kurukshetra University, KurukshetraDocument3 pagesUniversity Institute of Engineering & Technology Kurukshetra University, KurukshetratayerNo ratings yet
- Bright 2021 IOP Conf. Ser.: Mater. Sci. Eng. 1012 012019Document12 pagesBright 2021 IOP Conf. Ser.: Mater. Sci. Eng. 1012 012019Prince BadhanNo ratings yet
- Deep Foundation & Stress Analysis Method (SAM) of Slope Stability CheckingDocument31 pagesDeep Foundation & Stress Analysis Method (SAM) of Slope Stability CheckingRoel Pepito Sepat Jr.No ratings yet
- Замена проявки Xerox - WC - 7855FDocument12 pagesЗамена проявки Xerox - WC - 7855FkuharskiyvsNo ratings yet
- Clad Ex05Document17 pagesClad Ex05louloubelaziNo ratings yet
- Ankush Bansal B.tech Thesis PDFDocument57 pagesAnkush Bansal B.tech Thesis PDFAnurag DebNo ratings yet
- Workshop 1 Excavation of SoilDocument18 pagesWorkshop 1 Excavation of SoilManish Kumar SinghNo ratings yet
- Elements of CAD and Geometric ModellingDocument1 pageElements of CAD and Geometric ModellingSuresh NatarajanNo ratings yet
- Race Car Design Process DonorVisionDocument2 pagesRace Car Design Process DonorVisionjujuescrNo ratings yet
- Final PresentationDocument34 pagesFinal PresentationKirubel MogesNo ratings yet
- Module 4Document17 pagesModule 4santosh gillNo ratings yet
- Asgmt2 LDSG Sadi HossainDocument15 pagesAsgmt2 LDSG Sadi HossainSADI HOSSAINNo ratings yet
- Managing For Quality and Performance Excellence 10th Edition Evans Test BankDocument28 pagesManaging For Quality and Performance Excellence 10th Edition Evans Test Bankjamesstokesmfyqdrocjp100% (35)
- TNB-REHDA Engagement on New Proposal for Compact SubstationsDocument9 pagesTNB-REHDA Engagement on New Proposal for Compact SubstationsDan My100% (1)
- Besa TR50Document20 pagesBesa TR50michal.musollariNo ratings yet
- Network Analysis Question BankDocument16 pagesNetwork Analysis Question BankNakshtra DasNo ratings yet
- 2 2 5 B RocketdesignbuildDocument9 pages2 2 5 B Rocketdesignbuildapi-303523619No ratings yet
- ETABS V9 Introductory TutorialDocument68 pagesETABS V9 Introductory Tutorialphnc100% (2)
- Introduction To ProteusDocument34 pagesIntroduction To ProteusAzlan Aziz100% (2)
- The Future of Cable AttachmentsDocument14 pagesThe Future of Cable Attachmentsapi-690668324No ratings yet
- AE December 2016 98 Civ B3Document4 pagesAE December 2016 98 Civ B3Mohammed BaderNo ratings yet
- Engineering Design Rapid Prototyping FMEADocument7 pagesEngineering Design Rapid Prototyping FMEAGean Angeles ChNo ratings yet
- GD&T Advanced Manual - 3 DayDocument74 pagesGD&T Advanced Manual - 3 Dayimtiyaz100% (2)
- Test Bank For Technology in Action 10th Edition EvansDocument23 pagesTest Bank For Technology in Action 10th Edition EvansLindaEvansizgo100% (29)
- Software Application Lab Manual 17CVL67 PDFDocument47 pagesSoftware Application Lab Manual 17CVL67 PDFmohan100% (5)
- Design PortfolioDocument14 pagesDesign Portfolioaslamworld18No ratings yet
- Complete PCB Design Using OrCAD Capture and PCB EditorFrom EverandComplete PCB Design Using OrCAD Capture and PCB EditorRating: 5 out of 5 stars5/5 (1)
- The Definitive Guide to Modern Java Clients with JavaFX 17: Cross-Platform Mobile and Cloud DevelopmentFrom EverandThe Definitive Guide to Modern Java Clients with JavaFX 17: Cross-Platform Mobile and Cloud DevelopmentNo ratings yet
- Cost of Quality Analysis PDFDocument3 pagesCost of Quality Analysis PDFBIKASHNo ratings yet
- AP04 Autopilot)Document3 pagesAP04 Autopilot)Mario EstigarribiaNo ratings yet
- Unit 2 More Practice: VocabularyDocument6 pagesUnit 2 More Practice: Vocabularypol burcet100% (1)
- SGS SSC Aviation RPAS Whitepaper A4 EN LR 15 07 PDFDocument9 pagesSGS SSC Aviation RPAS Whitepaper A4 EN LR 15 07 PDFLina Maria CadavidNo ratings yet
- Warmate enDocument12 pagesWarmate enSonia RainaNo ratings yet
- Army C-sUAS Systems AssessmentDocument4 pagesArmy C-sUAS Systems AssessmentArthur WongNo ratings yet
- Gargalakos 2021Document9 pagesGargalakos 2021Nguyễn Minh TrìnhNo ratings yet
- List of Abbreviations Airworthiness Regulations 2018Document14 pagesList of Abbreviations Airworthiness Regulations 2018Jesus Bedriñana GasconNo ratings yet
- Fundamentals of Heat and Mass Transfer 6th EditionDocument23 pagesFundamentals of Heat and Mass Transfer 6th EditionAbelardo HutagalungNo ratings yet
- Výrobné Schopnosti ZBOP AJ2Document20 pagesVýrobné Schopnosti ZBOP AJ2Irin200No ratings yet
- Livermore Labs - From Video To KnowledgeDocument8 pagesLivermore Labs - From Video To KnowledgeLeakSourceInfoNo ratings yet
- E405 5L Agriculture Spraying Drone FrameDocument14 pagesE405 5L Agriculture Spraying Drone Framenoor azmanNo ratings yet
- Unmanned SystemsDocument48 pagesUnmanned SystemsJose A. HerreraNo ratings yet
- AEDP 02v1Document33 pagesAEDP 02v1snbanihashemi100% (1)
- A Comprehensive Review On Fuel Cell UAVDocument36 pagesA Comprehensive Review On Fuel Cell UAVSab-Win DamadNo ratings yet
- Imec HSI TechnologyDocument40 pagesImec HSI TechnologySuresh SkvNo ratings yet
- Aerospace America May 2017Document68 pagesAerospace America May 2017Rama KrishnaNo ratings yet
- Robotic Technology in The Construction IndustryDocument60 pagesRobotic Technology in The Construction IndustryRamana Mc100% (1)
- Preprints201811 0601 v1 PDFDocument19 pagesPreprints201811 0601 v1 PDFSatrio CiptoNo ratings yet
- Deep Learning-Based Strategies For The Detection and Tracking of Drones Using Several Cameras PDFDocument13 pagesDeep Learning-Based Strategies For The Detection and Tracking of Drones Using Several Cameras PDFManoj LNo ratings yet
- Uav ReportDocument11 pagesUav Reportkhghost67% (3)
- 2 Transport Research. The Strategic Role of Logistics in The Industry 4.0 EraDocument11 pages2 Transport Research. The Strategic Role of Logistics in The Industry 4.0 EraNeng RiszaNo ratings yet
- SHARE UAV Product CatalogDocument13 pagesSHARE UAV Product CatalogPresa KautsarNo ratings yet
- Nepal's Danfe Space Mission: Technology Demonstration Mission On A 3U CubeSat To Mitigate Glacial Lake Outburst FloodsDocument6 pagesNepal's Danfe Space Mission: Technology Demonstration Mission On A 3U CubeSat To Mitigate Glacial Lake Outburst FloodsSirash SayanjuNo ratings yet
- Welcome To Your Digital Edition Of: Aerospace & Defense TechnologyDocument50 pagesWelcome To Your Digital Edition Of: Aerospace & Defense TechnologyTúlio PiresNo ratings yet
- Powered Paraglider Uavs: Family of Leapp UavsDocument2 pagesPowered Paraglider Uavs: Family of Leapp UavsRenganathan V SankaranNo ratings yet
- Uav UpdateDocument16 pagesUav UpdateHanif Ahmad Abdul GhofurNo ratings yet
- Remondino PresentationDocument31 pagesRemondino PresentationAjie MilanDivernistiNo ratings yet
- The Russian Military's Lessons Learned in Syria - 0Document52 pagesThe Russian Military's Lessons Learned in Syria - 0ned72No ratings yet
- Drones Designed For Product DeliveryDocument9 pagesDrones Designed For Product DeliverySalahudinNo ratings yet