You might also like
- Operating Systems Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesFrom EverandOperating Systems Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesNo ratings yet
- 1-Unit-I Introduction To Embedded SystemsDocument29 pages1-Unit-I Introduction To Embedded SystemsNallappan Rajj ANo ratings yet
- Open-Source Robotics and Process Control Cookbook: Designing and Building Robust, Dependable Real-time SystemsFrom EverandOpen-Source Robotics and Process Control Cookbook: Designing and Building Robust, Dependable Real-time SystemsRating: 3 out of 5 stars3/5 (1)
- Lesson 1Document6 pagesLesson 1OCTAL, Krisia Helena May C.No ratings yet
- Practical Data Acquisition for Instrumentation and Control SystemsFrom EverandPractical Data Acquisition for Instrumentation and Control SystemsNo ratings yet
- Chapter 1 - Introduction To Embedded SystemDocument9 pagesChapter 1 - Introduction To Embedded SystemStephanie CalabungNo ratings yet
- Embedded Systems Department of Electrical and Computer Engineering Communication Engineering Focus Area Course Code-Eceg4202Document20 pagesEmbedded Systems Department of Electrical and Computer Engineering Communication Engineering Focus Area Course Code-Eceg4202yacob JacobNo ratings yet
- EC 308 Embedded SystemsDocument41 pagesEC 308 Embedded SystemsRemya BharathyNo ratings yet
- 3 Design Challenges, 05-01-2024Document74 pages3 Design Challenges, 05-01-2024kx.graphyNo ratings yet
- 3-Overview of Embedded Systems-05!01!2024Document107 pages3-Overview of Embedded Systems-05!01!2024kx.graphyNo ratings yet
- 01 Introduction Embedded System DesignDocument32 pages01 Introduction Embedded System DesignPAUL SATHIYANNo ratings yet
- Embedded - CO1Document124 pagesEmbedded - CO123mz02No ratings yet
- Module6 EmbeddednotesDocument49 pagesModule6 EmbeddednotesSocialsNo ratings yet
- Embedded SystemDocument12 pagesEmbedded System23mz41No ratings yet
- Introduction To Embedded SystemsDocument9 pagesIntroduction To Embedded SystemsElearning AdminNo ratings yet
- Es Unit1 PPT FinalDocument99 pagesEs Unit1 PPT FinalYadavilli VinayNo ratings yet
- Embedded Systems Introduction UpdatedDocument74 pagesEmbedded Systems Introduction UpdatedpolskakamlangeniNo ratings yet
- System Integration and Hardware Architecture: Dr. Ahmed AL-JanadDocument17 pagesSystem Integration and Hardware Architecture: Dr. Ahmed AL-JanadSabawoonz fkzNo ratings yet
- Ex: Watch: 1.1why We Need Embedded SystemsDocument22 pagesEx: Watch: 1.1why We Need Embedded SystemsElias YeshanawNo ratings yet
- ESD Unit 1Document17 pagesESD Unit 10442- TARUNNo ratings yet
- Unit 3Document48 pagesUnit 3Sultan BepariNo ratings yet
- Chapter 1Document46 pagesChapter 1kiramelaku1No ratings yet
- Embedded Systems BasicsDocument26 pagesEmbedded Systems BasicsFarhan AnsariNo ratings yet
- A Brief History of Real Time Embedded SystemDocument27 pagesA Brief History of Real Time Embedded SystemPradeepdarshan PradeepNo ratings yet
- Chapter 1 Introduction Embedded System by Surendra Shrestha Ioenotes PDFDocument31 pagesChapter 1 Introduction Embedded System by Surendra Shrestha Ioenotes PDFSuman PoudelNo ratings yet
- Embedded System - Sec1320Document106 pagesEmbedded System - Sec1320Sharmila chowdary tellaNo ratings yet
- Real-Time Operating Systems RTOSDocument38 pagesReal-Time Operating Systems RTOSአምላኬ አባቴNo ratings yet
- Embedded Systems Overview: - RTOS/EOS Design Concept - RTOS/EOS Case StudyDocument20 pagesEmbedded Systems Overview: - RTOS/EOS Design Concept - RTOS/EOS Case StudyosmanatamNo ratings yet
- 1.embedded Systems Chapter-1Document29 pages1.embedded Systems Chapter-1Goitom HaileNo ratings yet
- UNIT I - BoCS 3030 - 230822Document35 pagesUNIT I - BoCS 3030 - 230822Mike MiyobaNo ratings yet
- ESD MaterialDocument8 pagesESD MaterialVibhav MahaleNo ratings yet
- Lesson1 Docx-1Document14 pagesLesson1 Docx-1shaikhsahil hafijNo ratings yet
- Embedded System Life Cycle, GPIO and Intro To ArduinoDocument108 pagesEmbedded System Life Cycle, GPIO and Intro To ArduinoavogadroangsterNo ratings yet
- 1 Chapter 1 - IntroductionDocument35 pages1 Chapter 1 - IntroductionLord JackNo ratings yet
- 1 IntroductionDocument22 pages1 IntroductionMhmad DahamNo ratings yet
- Chapter 1 Introduction To Embedded Systems: ObjectivesDocument39 pagesChapter 1 Introduction To Embedded Systems: Objectivessreen67No ratings yet
- 11-Module 2 - System Call, Interrupts, Components of OS-29!04!2023Document91 pages11-Module 2 - System Call, Interrupts, Components of OS-29!04!2023Betha Sai Dheeraj 21BCE3046No ratings yet
- Embedded System Design: Narina Thakur Bharti Vidyapeeth's College of Engineering Dept of Computer ScienceDocument45 pagesEmbedded System Design: Narina Thakur Bharti Vidyapeeth's College of Engineering Dept of Computer Sciencekartika_krazeNo ratings yet
- Embedded 1Document109 pagesEmbedded 1SHUBHANKAR SONINo ratings yet
- "Embedded System": Seminar OnDocument32 pages"Embedded System": Seminar Onwarking866No ratings yet
- Embedded System Lecture Notes by Prof. Dr. Surendra Shrestha SirDocument698 pagesEmbedded System Lecture Notes by Prof. Dr. Surendra Shrestha SirAakura Pyakura50% (2)
- What's An Embedded System?Document14 pagesWhat's An Embedded System?Khánh QuốcNo ratings yet
- Introduction To Embedded SystemDocument42 pagesIntroduction To Embedded SystemMohd FahmiNo ratings yet
- Embedded System UNIT 1st Notes-1Document10 pagesEmbedded System UNIT 1st Notes-1My HackNo ratings yet
- Week1 HacettepeDocument51 pagesWeek1 Hacetteperavi_talawar-1No ratings yet
- Embedded SystemsDocument28 pagesEmbedded SystemsCheril Mehta0% (1)
- Embedded SystemsDocument65 pagesEmbedded SystemsDebesh ChaudharyNo ratings yet
- Unit - II Design of Embedded SystemDocument46 pagesUnit - II Design of Embedded Systemsai priyaanNo ratings yet
- Embedded Systems: Thanos Stathopoulos CS239 Spring 03Document29 pagesEmbedded Systems: Thanos Stathopoulos CS239 Spring 03sivani05No ratings yet
- Embedded SystemDocument25 pagesEmbedded Systemvidhya seemanNo ratings yet
- 1introduction To Embedded SystemDocument96 pages1introduction To Embedded SystemTech TutorialsNo ratings yet
- UNIT 1 Real Tima Embeded System at MwuDocument23 pagesUNIT 1 Real Tima Embeded System at Mwudine62611No ratings yet
- Jamshaid Sarwar Malik: Introduction To Embedded Systems Lectures 1 - 2Document36 pagesJamshaid Sarwar Malik: Introduction To Embedded Systems Lectures 1 - 2Saad SaleemNo ratings yet
- Embedded SystemsDocument24 pagesEmbedded Systemspavi1402No ratings yet
- Unit 1Document67 pagesUnit 1sophieee19No ratings yet
- Introduction To Embedded SystemsDocument16 pagesIntroduction To Embedded SystemsMalieka MuzaffarNo ratings yet
- Week1 Hacettepe 2016Document58 pagesWeek1 Hacettepe 2016mert ataçNo ratings yet
- Chapter-7 Designed Methodologies and Tools: Design Flow: Sequence of Steps in A Design MethodologyDocument16 pagesChapter-7 Designed Methodologies and Tools: Design Flow: Sequence of Steps in A Design MethodologyElias YeshanawNo ratings yet
- Unit - I Introduction To Embedded SystemDocument65 pagesUnit - I Introduction To Embedded SystemKumbagalla ShivaNo ratings yet
- Introduction To Emb SystemDocument95 pagesIntroduction To Emb SystemAyan AcharyaNo ratings yet
- RoundingDocument2 pagesRoundingbbbigadradNo ratings yet
- Lab 5Document13 pagesLab 5feezy1No ratings yet
- Uni USB Installer ReadmeDocument3 pagesUni USB Installer ReadmeepsodreNo ratings yet
- Lenovo Thinkpad t14 I7 10510u 14 16 512 Win 10 P 20s00013feDocument3 pagesLenovo Thinkpad t14 I7 10510u 14 16 512 Win 10 P 20s00013feELYOU89No ratings yet
- Dina Merali Brand GuidelinesDocument22 pagesDina Merali Brand GuidelinesRacksonNo ratings yet
- Statics of Rigid Bodies Chapter 2: VectorDocument56 pagesStatics of Rigid Bodies Chapter 2: VectorMac KYNo ratings yet
- Microsoft Dynamics NAV 5.0 SP1 CSIDE Client en-PH PDFDocument1 pageMicrosoft Dynamics NAV 5.0 SP1 CSIDE Client en-PH PDFDonna Rodelas PrietoNo ratings yet
- Parametrized Quantum Policies For Reinforcement LearningDocument33 pagesParametrized Quantum Policies For Reinforcement LearningLakshika RathiNo ratings yet
- OptiX OSN 500 Commissioning Guide V100R006Document104 pagesOptiX OSN 500 Commissioning Guide V100R006lahbak abderrahmeneNo ratings yet
- Experiment No.7: Aim: Estimation of Project Metrics Using COCOMO Model RequirementsDocument13 pagesExperiment No.7: Aim: Estimation of Project Metrics Using COCOMO Model RequirementsJackNo ratings yet
- VN-3100/VN-3100PC VN-2100/VN-2100PC VN-1100/VN-1100PC: Digital Voice RecorderDocument2 pagesVN-3100/VN-3100PC VN-2100/VN-2100PC VN-1100/VN-1100PC: Digital Voice RecorderAdrian Muñoz DelgadoNo ratings yet
- 186802-Model hc1Document150 pages186802-Model hc1Huy Trung GiápNo ratings yet
- Clozure CL DocumentationDocument290 pagesClozure CL DocumentationcurrecurreNo ratings yet
- ISO 27001:2022 - ISO 27002:2022: Annex A Clause 5.16 Identity ManagementDocument2 pagesISO 27001:2022 - ISO 27002:2022: Annex A Clause 5.16 Identity Managementfadwa turkiNo ratings yet
- Installation Guide Bare 2WD V1.0.0Document26 pagesInstallation Guide Bare 2WD V1.0.0anuruddhadsNo ratings yet
- Chirag Gupta: EducationDocument1 pageChirag Gupta: EducationSagor SahaNo ratings yet
- Junaid Khan Department of Computer Science University of Peshawar PakistanDocument20 pagesJunaid Khan Department of Computer Science University of Peshawar PakistanJunaid khanNo ratings yet
- Automated Attendance System Using Opencv: Abstract-Student Attendance Mainframe Structure IsDocument5 pagesAutomated Attendance System Using Opencv: Abstract-Student Attendance Mainframe Structure IsManikyam HemalathaNo ratings yet
- AI Based Video Capturing and Transfer To PC (Robot) : Presented byDocument34 pagesAI Based Video Capturing and Transfer To PC (Robot) : Presented bySrideep Amara ChoudaryNo ratings yet
- Technical Report MuskaanDocument29 pagesTechnical Report MuskaanMuskaan KumariNo ratings yet
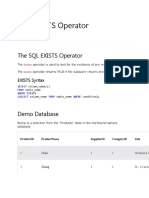
- The SQL EXISTS OperatorDocument5 pagesThe SQL EXISTS OperatorBharathNo ratings yet
- B311-221 10.0.1.1 (H187SP60C983) Firmware Release NotesDocument12 pagesB311-221 10.0.1.1 (H187SP60C983) Firmware Release NotesAbdoNo ratings yet
- Microstick II Information SheetDocument2 pagesMicrostick II Information Sheetmorcov19No ratings yet
- DH TPC BF2221 T (Thermal)Document4 pagesDH TPC BF2221 T (Thermal)ponidiNo ratings yet
- Life Is The Most Difficult Exam. Many People Fail Because They Try To Copy Others, Not Realizing That Everyone Has A Different Question Paper.Document3 pagesLife Is The Most Difficult Exam. Many People Fail Because They Try To Copy Others, Not Realizing That Everyone Has A Different Question Paper.Agyao Yam FaithNo ratings yet
- Comptia Network N10 008 Exam Cram 7Th Edition Emmett Dulaney Full ChapterDocument67 pagesComptia Network N10 008 Exam Cram 7Th Edition Emmett Dulaney Full Chapterlatasha.delvalle550100% (6)
- Chapter 3 Pythagoras Theorem and TrigonometryDocument72 pagesChapter 3 Pythagoras Theorem and TrigonometryUmair NawazNo ratings yet
- AS5.Chapter5 (1 14) IODocument2 pagesAS5.Chapter5 (1 14) IOPhúc HồngNo ratings yet
- EN FANOX DATA SILG FeederGeneratorProtection ProtectionRelays R016Document13 pagesEN FANOX DATA SILG FeederGeneratorProtection ProtectionRelays R016giauNo ratings yet
- EN1201: Introductory Mathematics: University of Colombo, Sri LankaDocument6 pagesEN1201: Introductory Mathematics: University of Colombo, Sri LankaJanaka Bandara100% (1)