You might also like
- LUXEON T (X) - LM-80 Report For Philips IndiaDocument59 pagesLUXEON T (X) - LM-80 Report For Philips IndiaAbdul GaffarNo ratings yet
- Deflection of Beams: Elastic Curve of The BeamDocument8 pagesDeflection of Beams: Elastic Curve of The BeamDr Praveen KumarNo ratings yet
- Strength of Material CHAPTERDocument21 pagesStrength of Material CHAPTERHiwot DemisseNo ratings yet
- Shear Force and Bending Moment Diagrams: (SFD & BMD)Document98 pagesShear Force and Bending Moment Diagrams: (SFD & BMD)AlexNo ratings yet
- Shearforceandbending Moment Diagrams (SFD & BMD) : Department of Architecture AastuDocument47 pagesShearforceandbending Moment Diagrams (SFD & BMD) : Department of Architecture AastuJesus is lordNo ratings yet
- Determination of Beam Deflection by Using Double-Integration Method & Residual by RindDocument10 pagesDetermination of Beam Deflection by Using Double-Integration Method & Residual by RindAbdul HafeezNo ratings yet
- Capitulo 2 y 3 - Anal. Deformaciones Relaciones Esfuerzo Deformacion PDFDocument57 pagesCapitulo 2 y 3 - Anal. Deformaciones Relaciones Esfuerzo Deformacion PDFCristian David BravoNo ratings yet
- Coursework BeamDocument29 pagesCoursework BeamandrewsugihartoNo ratings yet
- Chapter 3 Internal ForceDocument94 pagesChapter 3 Internal Forcetesera addisNo ratings yet
- Deflection of BeamDocument61 pagesDeflection of Beameutikol69No ratings yet
- Me16A: Chapter Three: Bending Moments and Shearing Forces in BeamsDocument68 pagesMe16A: Chapter Three: Bending Moments and Shearing Forces in BeamsAly Arquillano JrNo ratings yet
- SFD & BMDDocument99 pagesSFD & BMDChetanraj PatilNo ratings yet
- CH 8Document20 pagesCH 8Zahim HarkiNo ratings yet
- MEE 212 Pre - CH 5Document42 pagesMEE 212 Pre - CH 5alhassan Abdul MaleeqNo ratings yet
- ARC20011 Mechanics of Structures: Laboratory Session #2: Beam Bending Moment, Measurements and AnalysisDocument22 pagesARC20011 Mechanics of Structures: Laboratory Session #2: Beam Bending Moment, Measurements and AnalysisKushan HiranthaNo ratings yet
- SoM Chapter 6Document18 pagesSoM Chapter 6Wendimu TolessaNo ratings yet
- Deflections of BeamDocument27 pagesDeflections of BeamIrene Margaretha Lumban RajaNo ratings yet
- The Structures Are Basically Built To Withstand The Applied Loads. TheDocument27 pagesThe Structures Are Basically Built To Withstand The Applied Loads. TheArslan QureshiNo ratings yet
- Deflection of Beams PDFDocument28 pagesDeflection of Beams PDFBrave Hlulani MabasoNo ratings yet
- SoMLec BeamDeflectionDocument16 pagesSoMLec BeamDeflectionGibs RiveraNo ratings yet
- SFD & BMDDocument99 pagesSFD & BMDChetanraj Patil100% (2)
- Chapter V - Analysis of BeamsDocument13 pagesChapter V - Analysis of BeamsMostafa Essam Ezzat MahmoudNo ratings yet
- Deflection of BeamsDocument3 pagesDeflection of BeamsAGEGTAMNo ratings yet
- Mec32-3 Shear Moment in Beams With Simple LoadingDocument22 pagesMec32-3 Shear Moment in Beams With Simple LoadingJhenalyn Del RosarioNo ratings yet
- CH 07Document9 pagesCH 07samaptapwNo ratings yet
- TorsionDocument8 pagesTorsionZewdieNo ratings yet
- Internal Forces in BeamsDocument14 pagesInternal Forces in BeamsErikNo ratings yet
- S A D - I: Tructural Nalysis AND EsignDocument31 pagesS A D - I: Tructural Nalysis AND EsignRafiur RahmanNo ratings yet
- Module 2A-2 Graphical MethodDocument8 pagesModule 2A-2 Graphical MethodDilum VRNo ratings yet
- CH 02Document61 pagesCH 02LeonardoMadeira11No ratings yet
- SFD BMD NotesDocument35 pagesSFD BMD NotesSakshi Gupta100% (1)
- PPT-SF BM 1Document68 pagesPPT-SF BM 1Sudhir PatelNo ratings yet
- Materi #5-LENDUTAN BALOKDocument20 pagesMateri #5-LENDUTAN BALOKpoppyNo ratings yet
- UntitledDocument9 pagesUntitledEdward NaanmaNo ratings yet
- Analysis of BeamsDocument14 pagesAnalysis of Beamsمحسن عبدالله البركيNo ratings yet
- Topic 4 Shear and BendingDocument29 pagesTopic 4 Shear and BendingRosal EbarleNo ratings yet
- Unit-2 FLEXUREDocument49 pagesUnit-2 FLEXURENicholas ThompsonNo ratings yet
- Chapter IV Shear and Moment in Beams 4.1 4.2 4.3Document8 pagesChapter IV Shear and Moment in Beams 4.1 4.2 4.3Joshua John Julio100% (1)
- Mechanics of StructuresDocument70 pagesMechanics of StructuresShavin ChandNo ratings yet
- Introductory Mechanics of Materials ReviewDocument0 pagesIntroductory Mechanics of Materials ReviewDr. Madhukar Vable100% (1)
- Unit - I Deflection of Determinate Beams: Differential Equation of The Elastic Curve Macaulay'S Method-Moment Area MethodDocument14 pagesUnit - I Deflection of Determinate Beams: Differential Equation of The Elastic Curve Macaulay'S Method-Moment Area MethodpengniumNo ratings yet
- SF BM TheoryDocument4 pagesSF BM TheoryRAMAKANT RANANo ratings yet
- Lab Report (Bending) - Mohd Syazwan Bin Sarudin - 2021836538Document22 pagesLab Report (Bending) - Mohd Syazwan Bin Sarudin - 2021836538Wanz SkylineNo ratings yet
- Chapter-4-Stresses in BeamsDocument25 pagesChapter-4-Stresses in BeamsSani MohammedNo ratings yet
- 10-ENGG 410 CHAPTER 8 - Part 1Document16 pages10-ENGG 410 CHAPTER 8 - Part 1Joana Rosette TordecillaNo ratings yet
- Final Draft 1Document19 pagesFinal Draft 1Mohamed mohy el deenNo ratings yet
- CHAPTER 2 FORCE VECTOR (Mechanic)Document41 pagesCHAPTER 2 FORCE VECTOR (Mechanic)Afiq NajmiNo ratings yet
- Review of Lateral-Torsional Buckling Design ProvisionsDocument16 pagesReview of Lateral-Torsional Buckling Design ProvisionsDhimas ZakariaNo ratings yet
- Cve 201 Module 2Document14 pagesCve 201 Module 2Samuel Silas100% (1)
- ENR202 Lecture 5B Slides and NotesDocument51 pagesENR202 Lecture 5B Slides and NotesJosif FaceFakeNo ratings yet
- Shear and Moment Equations and Diagrams Shear and Moment Equations and DiagramsDocument21 pagesShear and Moment Equations and Diagrams Shear and Moment Equations and DiagramsPrasanth KumarNo ratings yet
- Introduction To StructuresDocument34 pagesIntroduction To StructuresObed JimmyNo ratings yet
- S2-3 Torsion-14Document16 pagesS2-3 Torsion-14abouelrich188No ratings yet
- Built Up ColumnsDocument22 pagesBuilt Up Columnsfinn.crown100% (1)
- Deflection of Elastic Beam PDFDocument32 pagesDeflection of Elastic Beam PDFZahid JiwaNo ratings yet
- Partial Interaction TheoryDocument11 pagesPartial Interaction TheoryJaleel ClaasenNo ratings yet
- Null 1Document39 pagesNull 1LAURENT JIBUNGENo ratings yet
- Direct Stiffness MethodDocument18 pagesDirect Stiffness MethodJayChristian Quimson100% (1)
- Yield Line Analysis For Slabs: Version 2 CE IIT, KharagpurDocument31 pagesYield Line Analysis For Slabs: Version 2 CE IIT, KharagpurkvrgmsNo ratings yet
- Beams and Framed Structures: Structures and Solid Body MechanicsFrom EverandBeams and Framed Structures: Structures and Solid Body MechanicsRating: 3 out of 5 stars3/5 (2)
- Slab Design Using Co-Efficients As Per Is 456-2000Document2 pagesSlab Design Using Co-Efficients As Per Is 456-2000naveenpnaidu1No ratings yet
- Final Column RFT Column RFT - V6 - 06122018Document3 pagesFinal Column RFT Column RFT - V6 - 06122018naveenpnaidu1No ratings yet
- Slab Design Using Co-Efficients As Per Is 456-2000Document2 pagesSlab Design Using Co-Efficients As Per Is 456-2000naveenpnaidu1No ratings yet
- TABLE: Joint Reactions Story Joint Label Unique Name Load Case/Combo FX FY FZ MXDocument2 pagesTABLE: Joint Reactions Story Joint Label Unique Name Load Case/Combo FX FY FZ MXnaveenpnaidu1No ratings yet
- Project: D.F.Doddamani Date: Designed By: CHKD byDocument4 pagesProject: D.F.Doddamani Date: Designed By: CHKD bynaveenpnaidu1No ratings yet
- Eccentricity Footing - 01022020Document7 pagesEccentricity Footing - 01022020naveenpnaidu1No ratings yet
- TABLE: Joint Reactions Story Joint Label Unique Name Load Case/Combo FX FY FZ MXDocument6 pagesTABLE: Joint Reactions Story Joint Label Unique Name Load Case/Combo FX FY FZ MXnaveenpnaidu1No ratings yet
- TABLE: Joint Reactions Story Joint Label Unique Name Load Case/Combo FX FY FZ MXDocument6 pagesTABLE: Joint Reactions Story Joint Label Unique Name Load Case/Combo FX FY FZ MXnaveenpnaidu1No ratings yet
- fOOTING rEACTIONS - 21122018Document2 pagesfOOTING rEACTIONS - 21122018naveenpnaidu1No ratings yet
- TABLE: Joint Reactions Story Joint Label Unique Name Load Case/Combo FX FY FZ MXDocument2 pagesTABLE: Joint Reactions Story Joint Label Unique Name Load Case/Combo FX FY FZ MXnaveenpnaidu1No ratings yet
- Slab Design Using Co-Efficients As Per Is 456-2000Document2 pagesSlab Design Using Co-Efficients As Per Is 456-2000naveenpnaidu1No ratings yet
- Project: Datta Ellur Residence Date: Designed By: CHKD byDocument10 pagesProject: Datta Ellur Residence Date: Designed By: CHKD bynaveenpnaidu1No ratings yet
- TABLE: Joint Reactions Story Joint Label Unique Name Load Case/Combo FX FY FZ MXDocument2 pagesTABLE: Joint Reactions Story Joint Label Unique Name Load Case/Combo FX FY FZ MXnaveenpnaidu1No ratings yet
- TABLE: Concrete Column Summary - IS 456-2000 Story Label Unique Name Design Section Station Design/Check Status PMM RatioDocument3 pagesTABLE: Concrete Column Summary - IS 456-2000 Story Label Unique Name Design Section Station Design/Check Status PMM Rationaveenpnaidu1No ratings yet
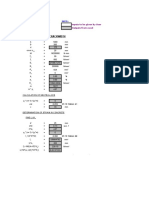
- Calculation of Crackwidth: Inputs To Be Given by User Outputs From ExcelDocument2 pagesCalculation of Crackwidth: Inputs To Be Given by User Outputs From Excelnaveenpnaidu1No ratings yet
- Calculation of Crackwidth: Inputs To Be Given by User Outputs From ExcelDocument10 pagesCalculation of Crackwidth: Inputs To Be Given by User Outputs From Excelnaveenpnaidu1No ratings yet
- Bending Moment Criteria:::::: Area of Steel ProvidedDocument5 pagesBending Moment Criteria:::::: Area of Steel Providednaveenpnaidu1No ratings yet
- TABLE: Joint Reactions Story Joint Label Unique Name Load Case/Combo FX FY FZ MX MYDocument22 pagesTABLE: Joint Reactions Story Joint Label Unique Name Load Case/Combo FX FY FZ MX MYnaveenpnaidu1No ratings yet
- The Accounting Equation & Transaction Analysis: Assets Liabilities Net WorthDocument6 pagesThe Accounting Equation & Transaction Analysis: Assets Liabilities Net WorthNishita AkterNo ratings yet
- Marhaba Presentation - CompressedDocument28 pagesMarhaba Presentation - CompressedJaveed MohiuddinNo ratings yet
- App 39854 PDFDocument9 pagesApp 39854 PDFNasir QayyumNo ratings yet
- FDOC Inspector General InvestigationDocument25 pagesFDOC Inspector General InvestigationActionNewsJaxNo ratings yet
- 1ST PERIODICAl NGLISH-9Document2 pages1ST PERIODICAl NGLISH-9Jason EstilloreNo ratings yet
- Leac 203Document27 pagesLeac 203Ias Aspirant AbhiNo ratings yet
- 5 m3 For STP ProposalDocument15 pages5 m3 For STP ProposalShah Newaz KabirNo ratings yet
- 1746-Article Text-5670-2-10-20220203Document6 pages1746-Article Text-5670-2-10-20220203Annisa Nyak LestariNo ratings yet
- Ptb311e 1Document5 pagesPtb311e 1TarekNo ratings yet
- 1 Modul Bahasa Inggris Kelas 4Document8 pages1 Modul Bahasa Inggris Kelas 4UshuluddinNo ratings yet
- CCS-OJT-05A-02 (Performance Evaluation Form - ABET Accredited Programs)Document4 pagesCCS-OJT-05A-02 (Performance Evaluation Form - ABET Accredited Programs)Wynne TillasNo ratings yet
- Notes - New Central Bank ActDocument4 pagesNotes - New Central Bank ActJingle BellsNo ratings yet
- KSR International Membership Application Form - 201603 - WebsiteDocument2 pagesKSR International Membership Application Form - 201603 - Websiteseb2008No ratings yet
- Assessing Classroom Management Practices Setting The Stage For Effective and Equitable InterventionAssessment For Effective InterventionDocument5 pagesAssessing Classroom Management Practices Setting The Stage For Effective and Equitable InterventionAssessment For Effective Interventionzgr2yhf7wpNo ratings yet
- Balluff BTL5-P1-M0300-P-S PDFDocument12 pagesBalluff BTL5-P1-M0300-P-S PDFhaiNo ratings yet
- KW, KVR and KVADocument1 pageKW, KVR and KVASyamraj JayarajanNo ratings yet
- IoT Industrial Router Design Guide Extension To SD-WANDocument98 pagesIoT Industrial Router Design Guide Extension To SD-WANsm.ccde2024No ratings yet
- The Boo-Bot ConceptDocument6 pagesThe Boo-Bot ConceptCesar GomezNo ratings yet
- Mommy Blogger List - Updated - Sept 8Document3 pagesMommy Blogger List - Updated - Sept 8DivyaBhatiaKaulNo ratings yet
- MindMap RubricDocument1 pageMindMap Rubriccabrera.adolfo1862No ratings yet
- Plants: Jute: A Potential Candidate For Phytoremediation of Metals-A ReviewDocument14 pagesPlants: Jute: A Potential Candidate For Phytoremediation of Metals-A ReviewDark KillerNo ratings yet
- WHO Basic Emergency CareDocument70 pagesWHO Basic Emergency CareMark Philipp AbanNo ratings yet
- LG 32,37,42lc2d-EcDocument61 pagesLG 32,37,42lc2d-EcvideosonNo ratings yet
- Bodin2016 PDFDocument6 pagesBodin2016 PDFtantai2004No ratings yet
- A Progressive Aspect of VerbDocument24 pagesA Progressive Aspect of VerbAngela Pearl Cobacha - QuiambaoNo ratings yet
- Josephinecamara Cv-TrainingDocument3 pagesJosephinecamara Cv-Trainingapi-303193354No ratings yet
- 6.raising Organic Small - RuminantsDocument10 pages6.raising Organic Small - RuminantsAbner Obniala Venus Jr.No ratings yet
- Torque Problems From HoltDocument5 pagesTorque Problems From Holtgiri_sundar5930No ratings yet
- Draft NdaDocument3 pagesDraft NdaN.A.P. HNo ratings yet