You might also like
- Project's Estimated Residual Income and Required InvestmentDocument7 pagesProject's Estimated Residual Income and Required InvestmentblueberryNo ratings yet
- Understanding DSPDocument8 pagesUnderstanding DSPgoucloud100% (1)
- Experimental Modal AnalysisDocument11 pagesExperimental Modal Analysisrs0004No ratings yet
- Electrical Application and Installation Guide For Petroleum TransmissionsDocument131 pagesElectrical Application and Installation Guide For Petroleum Transmissionsharikrishnanpd3327100% (2)
- Defying Danger RPGDocument9 pagesDefying Danger RPGmondytriggers2944No ratings yet
- Computability Theory: An Introduction to Recursion Theory, Students Solutions Manual (e-only)From EverandComputability Theory: An Introduction to Recursion Theory, Students Solutions Manual (e-only)No ratings yet
- The Convolution SumDocument8 pagesThe Convolution SumkrajasekarantutiNo ratings yet
- Lec20 PDFDocument12 pagesLec20 PDFRaviNo ratings yet
- Lec 50Document17 pagesLec 50Ankan BhuniaNo ratings yet
- Lec 7Document23 pagesLec 7Mukund ShahNo ratings yet
- Lec 26Document26 pagesLec 26Win Alfalah NasutionNo ratings yet
- Lec 27Document22 pagesLec 27BJI ALUMNINo ratings yet
- Chemical Process Control Lecture - 19: Understanding Numerator DynamicsDocument13 pagesChemical Process Control Lecture - 19: Understanding Numerator DynamicsLikhithNo ratings yet
- Lec 26Document27 pagesLec 26salimNo ratings yet
- Voltage Stability Analysis and Shortest Distance to InstabilityDocument29 pagesVoltage Stability Analysis and Shortest Distance to InstabilitydeciohNo ratings yet
- W 1 Z2 FX8 R QC 0Document16 pagesW 1 Z2 FX8 R QC 0STI2D LSSNNo ratings yet
- Systematic Tuning Using Frequency Domain AnalysisDocument23 pagesSystematic Tuning Using Frequency Domain AnalysisNizmy NazeerNo ratings yet
- What Is Response Spectrum AnalysisDocument43 pagesWhat Is Response Spectrum AnalysisEJOUMALENo ratings yet
- Control Engineering Lec - 41Document26 pagesControl Engineering Lec - 41Sharath MunduriNo ratings yet
- 4 Time Domain Representation of Linear Time-Invariant SystemsDocument12 pages4 Time Domain Representation of Linear Time-Invariant SystemsDebanjan SahaNo ratings yet
- Nonlinear Dynamical Systems Course IntroductionDocument26 pagesNonlinear Dynamical Systems Course IntroductionAhmet A. YurttadurNo ratings yet
- Machine Control SystemsDocument9 pagesMachine Control SystemsHisham SyedNo ratings yet
- Lec 1Document20 pagesLec 1hamodeh breikNo ratings yet
- Lec 23Document18 pagesLec 23Win Alfalah NasutionNo ratings yet
- « Introduction to Biomedical Engineering»: СourseDocument5 pages« Introduction to Biomedical Engineering»: СourseEbrahim Abd El HadyNo ratings yet
- Complex Exponential Pseudomodes of LTI Operators Over Finite IntervalsDocument4 pagesComplex Exponential Pseudomodes of LTI Operators Over Finite IntervalsrallabhandiSKNo ratings yet
- Dmat0101, Notes 4: The Fourier Transform of The Schwartz Class and Tempered DistributionsDocument19 pagesDmat0101, Notes 4: The Fourier Transform of The Schwartz Class and Tempered DistributionsNelson KigenNo ratings yet
- Lec 39Document32 pagesLec 39Sueja MalligwadNo ratings yet
- Time and Frequency Domain Concepts in Process Instrumentation and Control (CHE3002Document19 pagesTime and Frequency Domain Concepts in Process Instrumentation and Control (CHE3002Ermias NigussieNo ratings yet
- Lec 28Document24 pagesLec 28Win Alfalah NasutionNo ratings yet
- Aerodynamics Similarity Rules Reduce VariablesDocument15 pagesAerodynamics Similarity Rules Reduce VariablesRitu SinghNo ratings yet
- Lec34 PDFDocument15 pagesLec34 PDFRitu SinghNo ratings yet
- Lec 45Document10 pagesLec 45pmahesh268No ratings yet
- First Law of Thermodynamics For Open Systems or Flow ProcessDocument32 pagesFirst Law of Thermodynamics For Open Systems or Flow ProcessGurunath AeroNo ratings yet
- Impulse Response Function Spectral AnalysisDocument2 pagesImpulse Response Function Spectral AnalysisPremanand SubramaniNo ratings yet
- Poles, Zeros, and Higher Order FiltersDocument7 pagesPoles, Zeros, and Higher Order FiltersJanNo ratings yet
- Example of Discrete Systems: Find Unit Sample ResponseDocument5 pagesExample of Discrete Systems: Find Unit Sample ResponsePaul KevinNo ratings yet
- Lec 1Document26 pagesLec 1Win Alfalah NasutionNo ratings yet
- Lec 28Document19 pagesLec 28BJI ALUMNINo ratings yet
- EE4 Convolution TutorialDocument10 pagesEE4 Convolution TutorialAppleWangAceNo ratings yet
- Lec 2Document45 pagesLec 2RaviNo ratings yet
- IIT Madras Analog IC Design - Step and Sinusoidal State ResponsesDocument17 pagesIIT Madras Analog IC Design - Step and Sinusoidal State ResponsesUrja ShahNo ratings yet
- System Linear and Non-Linear: Experiment No. 4Document7 pagesSystem Linear and Non-Linear: Experiment No. 4Robin ScherbatskyNo ratings yet
- Lec 17Document12 pagesLec 17RUCHIRA KUMAR PRADHANNo ratings yet
- Lec 32Document16 pagesLec 32salimNo ratings yet
- Control PidDocument19 pagesControl PidmanueldidyNo ratings yet
- Mass Transfer II Prof. Nishith Verma Department of Chemical Engineering Indian Institute of Technology, Kanpur Module No. # 01 Lecture No. # 40Document29 pagesMass Transfer II Prof. Nishith Verma Department of Chemical Engineering Indian Institute of Technology, Kanpur Module No. # 01 Lecture No. # 40prthrNo ratings yet
- Ns - Free - Undamped/vibrations - Free - Undamped - HTM: Free Vibration of Conservative, Single Degree of Freedom, Linear SystemsDocument20 pagesNs - Free - Undamped/vibrations - Free - Undamped - HTM: Free Vibration of Conservative, Single Degree of Freedom, Linear SystemsLeo KutsNo ratings yet
- Power System Analysis Prof. S.N. Singh Department of Electrical Engineering Indian Institute of Technology, Kanpur Lecture - 17Document30 pagesPower System Analysis Prof. S.N. Singh Department of Electrical Engineering Indian Institute of Technology, Kanpur Lecture - 17Engr Fahimuddin QureshiNo ratings yet
- PKM K Usaha Jamur Crispy KriukDocument17 pagesPKM K Usaha Jamur Crispy Kriukraihan riadhyNo ratings yet
- FC TkcyDocument73 pagesFC TkcyAjayNo ratings yet
- Lec11 PDFDocument13 pagesLec11 PDFRaviNo ratings yet
- Electronics For Analog Signal Processing - K. Radhakrishna RaoDocument26 pagesElectronics For Analog Signal Processing - K. Radhakrishna RaoJULIAN MEJIANo ratings yet
- Time Series: H T 2008 P - G RDocument161 pagesTime Series: H T 2008 P - G RManoj Kumar ManishNo ratings yet
- Chapter 4Document11 pagesChapter 4api-19951707No ratings yet
- Free Damped VibrationsDocument7 pagesFree Damped VibrationsYob YnnosNo ratings yet
- Taylor's Theorem and Its ApplicationsDocument20 pagesTaylor's Theorem and Its ApplicationseracksNo ratings yet
- Magnification Factor and Frequency Response CurveDocument8 pagesMagnification Factor and Frequency Response CurveAdeoti OladapoNo ratings yet
- Fourier Series IntroductionDocument58 pagesFourier Series IntroductionAnna RominaNo ratings yet
- The Laplace transformation simplifiedDocument21 pagesThe Laplace transformation simplifiedrahulsinha592No ratings yet
- Adaptive Distance RelayingDocument25 pagesAdaptive Distance RelayingsrifaceNo ratings yet
- Electronics for Analog Signal ProcessingDocument24 pagesElectronics for Analog Signal ProcessingAnonymous VASS3z0wTHNo ratings yet
- Kaushal Kishor Vs State of Uttar Pradesh and Ors 0SC20230401231700051COM984025Document120 pagesKaushal Kishor Vs State of Uttar Pradesh and Ors 0SC20230401231700051COM984025SunitaNo ratings yet
- In Re The Berubari Union and Exchange of Enclaves s600049COM684641Document20 pagesIn Re The Berubari Union and Exchange of Enclaves s600049COM684641Prince KumarNo ratings yet
- Unit 5 - Week 4: Assignment 4Document3 pagesUnit 5 - Week 4: Assignment 4Prince KumarNo ratings yet
- Unit 6 - Week 5: Assignment 5Document4 pagesUnit 6 - Week 5: Assignment 5Prince KumarNo ratings yet
- Lec 30Document14 pagesLec 30Prince KumarNo ratings yet
- LAplace Transform MethodsDocument13 pagesLAplace Transform MethodskeepfloppingacesNo ratings yet
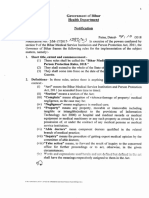
- Bihar issues rules on medical negligence complaintsDocument7 pagesBihar issues rules on medical negligence complaintsPrince KumarNo ratings yet
- Upsc Books List PDFDocument3 pagesUpsc Books List PDFChethan Kumar TN100% (1)
- CutOff CSE 2018 Engl RDocument2 pagesCutOff CSE 2018 Engl RShishir AgrawalNo ratings yet
- Problem Table Analysis PDFDocument7 pagesProblem Table Analysis PDFmebrahtomNo ratings yet
- Bihar issues rules on medical negligence complaintsDocument7 pagesBihar issues rules on medical negligence complaintsPrince KumarNo ratings yet
- Lec 21Document13 pagesLec 21Prince KumarNo ratings yet
- PJFinal - PPSXDocument35 pagesPJFinal - PPSXPrince KumarNo ratings yet
- RombergDocument1 pageRombergPrince KumarNo ratings yet
- Hot and Cold Pinch PDFDocument7 pagesHot and Cold Pinch PDFYatharth SahuNo ratings yet
- Blade ProblemDocument1 pageBlade ProblemPrince KumarNo ratings yet
- Periodic Table: Oakland Schools Chemistry Resource UnitDocument42 pagesPeriodic Table: Oakland Schools Chemistry Resource UnitAnum TauqirNo ratings yet
- The American School of Classical Studies at AthensDocument23 pagesThe American School of Classical Studies at AthensDanilo Andrade TaboneNo ratings yet
- PEC ReviewerDocument17 pagesPEC ReviewerJunallyn ManigbasNo ratings yet
- Moral and Non Moral StandardsDocument6 pagesMoral and Non Moral StandardsGerry AbuanNo ratings yet
- Letter of RecommendationDocument2 pagesLetter of RecommendationnaveenNo ratings yet
- Syllabus For ETABSDocument2 pagesSyllabus For ETABSSandgrouse RajNo ratings yet
- Quality Control and Assurance Processes for Coffee ProductionDocument5 pagesQuality Control and Assurance Processes for Coffee ProductionSharifah NuruljannahNo ratings yet
- The Teacher and Student Relationship of Haydn and BeethovenDocument10 pagesThe Teacher and Student Relationship of Haydn and BeethovenVinny MuscarellaNo ratings yet
- Crescent Moon InstructionsDocument7 pagesCrescent Moon InstructionsSARANo ratings yet
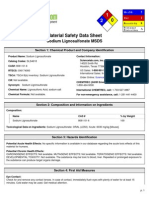
- Sodium Lignosulfonate MSDS: Section 1: Chemical Product and Company IdentificationDocument5 pagesSodium Lignosulfonate MSDS: Section 1: Chemical Product and Company IdentificationYasdiOKNo ratings yet
- Paper 1R MSDocument25 pagesPaper 1R MSAkashNo ratings yet
- Post Office Challan - RRB RECRUITMENT PDFDocument1 pagePost Office Challan - RRB RECRUITMENT PDFGaurav KashyapNo ratings yet
- Quantum Computing CSDocument101 pagesQuantum Computing CSRaghavNo ratings yet
- Epimastic 7200: Product DescriptionDocument2 pagesEpimastic 7200: Product DescriptionSu KaNo ratings yet
- EOS Web and Multimedia L3Document53 pagesEOS Web and Multimedia L3ብርሃነ ኣፅብሃNo ratings yet
- Tracing Chronic Fatigue Syndrome Tsfunction Is Key To ME - CFS - B Day PDFDocument91 pagesTracing Chronic Fatigue Syndrome Tsfunction Is Key To ME - CFS - B Day PDFsanthigiNo ratings yet
- Lab Manual Ds&BdalDocument100 pagesLab Manual Ds&BdalSEA110 Kshitij BhosaleNo ratings yet
- Pizza Hut Training Manual FinishedDocument34 pagesPizza Hut Training Manual FinishedEdilson MaziveNo ratings yet
- Master of Arts (Education) /post Graduate Diploma in Educational Management and Administration (Maedu/Pgdema) Term-End Examination June, 2020Document7 pagesMaster of Arts (Education) /post Graduate Diploma in Educational Management and Administration (Maedu/Pgdema) Term-End Examination June, 2020Shreyashi Santra MitraNo ratings yet
- Laptops and Desktop-MAY PRICE 2011Document8 pagesLaptops and Desktop-MAY PRICE 2011Innocent StrangerNo ratings yet
- Surface Modification of Titanium Orthodontic ImplaDocument30 pagesSurface Modification of Titanium Orthodontic ImplaMary SmileNo ratings yet
- Rousyan Faikar (21060111130111) LampiranDocument50 pagesRousyan Faikar (21060111130111) Lampiranrousyan faikarNo ratings yet
- Estatement 2020022506Document1 pageEstatement 2020022506ALL IN ONE. BOOLIWOOd SONGNo ratings yet
- MCM SQL PDFDocument8 pagesMCM SQL PDFJeyakumar NarasingamNo ratings yet
- Benefits of sponge cities in managing urban stormwater and floodingDocument3 pagesBenefits of sponge cities in managing urban stormwater and floodingShivamNo ratings yet
- Actma Batch 14 Quiz..Document3 pagesActma Batch 14 Quiz..Mark Tozuka100% (1)
- C++ Classes and ObjectsDocument4 pagesC++ Classes and ObjectsAll TvwnzNo ratings yet