You might also like
- Assignment 5Document3 pagesAssignment 5Minh LuanNo ratings yet
- Lecture 6Document13 pagesLecture 6Jitesh HemjiNo ratings yet
- Chapter 4 DualityDocument19 pagesChapter 4 DualityHong KimmengNo ratings yet
- Ps 2Document3 pagesPs 2Maja GwozdzNo ratings yet
- Ps 3Document2 pagesPs 3Chashan DeepNo ratings yet
- 1 I M T I I NDocument2 pages1 I M T I I NSamuel Alfonzo Gil BarcoNo ratings yet
- 2022 - Week - 2 - Ch.2 RV and Stochastic ProbDocument15 pages2022 - Week - 2 - Ch.2 RV and Stochastic Probseungnam kimNo ratings yet
- ps2 2018 AnsDocument8 pagesps2 2018 Ans006KAbhishek KumarNo ratings yet
- Quantum Physics - Quiz 1: (Dated: October 23, 2017)Document1 pageQuantum Physics - Quiz 1: (Dated: October 23, 2017)Kaplan yuNo ratings yet
- Assignment2Statement 1Document2 pagesAssignment2Statement 1Sasan GhasaeiNo ratings yet
- HW3 Solutions AutotagDocument6 pagesHW3 Solutions Autotagapple tedNo ratings yet
- PS_Answers_fall2022_mergedDocument91 pagesPS_Answers_fall2022_mergedJulien MonninNo ratings yet
- Math 121A: Homework 5 (Due March 6) : Part 1: Multiple IntegrationDocument2 pagesMath 121A: Homework 5 (Due March 6) : Part 1: Multiple IntegrationcfisicasterNo ratings yet
- PH Methods 5Document2 pagesPH Methods 5Roy VeseyNo ratings yet
- Optimization-Based Control: Richard M. Murray Control and Dynamical Systems California Institute of TechnologyDocument21 pagesOptimization-Based Control: Richard M. Murray Control and Dynamical Systems California Institute of TechnologyBang JulNo ratings yet
- Support Vector Machines: 1 OutlineDocument19 pagesSupport Vector Machines: 1 OutlineDom DeSiciliaNo ratings yet
- Cal1 Econ Week2Document15 pagesCal1 Econ Week2Jaselle NamuagNo ratings yet
- CS6910 Tutorial1Document10 pagesCS6910 Tutorial1Kaspa VivekNo ratings yet
- (Brandenberg) Refined Cut Selection For Benders DecompositionDocument30 pages(Brandenberg) Refined Cut Selection For Benders DecompositionDAVID MORANTENo ratings yet
- Partial Differential Equations: (By Integral Transformations)Document24 pagesPartial Differential Equations: (By Integral Transformations)yahmedpersNo ratings yet
- Numerical Integration: Study OrganiserDocument10 pagesNumerical Integration: Study Organisersandhiya sunainaNo ratings yet
- Midterm SolutionsDocument9 pagesMidterm SolutionsJohnathan SandersonNo ratings yet
- Mathematical Sci. Paper 2 PDFDocument7 pagesMathematical Sci. Paper 2 PDFعنترة بن شدادNo ratings yet
- 400_7Document26 pages400_7mikebookuserNo ratings yet
- EE364b Homework SolutionsDocument5 pagesEE364b Homework SolutionsShy PeachD100% (1)
- 06 Subgradients ScribedDocument5 pages06 Subgradients ScribedFaragNo ratings yet
- Math 121A: Midterm InformationDocument2 pagesMath 121A: Midterm InformationcfisicasterNo ratings yet
- Orthogonal Functions - Function ApproximationDocument29 pagesOrthogonal Functions - Function ApproximationVayo SonyNo ratings yet
- Assign 2Document2 pagesAssign 2Deepak JhaNo ratings yet
- Karush Kuhn TuckerDocument14 pagesKarush Kuhn TuckerAVALLESTNo ratings yet
- KKT conditions for convex optimizationDocument7 pagesKKT conditions for convex optimizationRupaj NayakNo ratings yet
- Lecture 35: δ-functions, Eigenfunctions of X, and Discrete Variable RepresentationDocument9 pagesLecture 35: δ-functions, Eigenfunctions of X, and Discrete Variable RepresentationTui CohenNo ratings yet
- AM12 Optimization 2 HandoutDocument27 pagesAM12 Optimization 2 Handout张舒No ratings yet
- QA20091 Em2 27 - 1Document4 pagesQA20091 Em2 27 - 1api-25895802No ratings yet
- PDE Assignment 12Document2 pagesPDE Assignment 12bharadwajaNo ratings yet
- Mathematical Methods HW 12Document2 pagesMathematical Methods HW 12Ishmael Hossain SheikhNo ratings yet
- MIT15 093J F09 Final 2008Document9 pagesMIT15 093J F09 Final 2008santiago gonzalezNo ratings yet
- Homework Set 4: Due September 4Document2 pagesHomework Set 4: Due September 4jog10No ratings yet
- CFD Week 1 and 2: A General Form of The Conservation EquationsDocument7 pagesCFD Week 1 and 2: A General Form of The Conservation EquationsSudhansu KumarNo ratings yet
- Nonlinear Programming 3rd Edition Theoretical Solutions ManualDocument33 pagesNonlinear Programming 3rd Edition Theoretical Solutions ManualJigo CasteloNo ratings yet
- Quantum Mechanics, Exercise 03: 1 Probability CurrentDocument2 pagesQuantum Mechanics, Exercise 03: 1 Probability CurrentAmir HalutsNo ratings yet
- Homework 3Document2 pagesHomework 3zenden626No ratings yet
- Mathematics of Compressive Sensing: Sparse recovery using `1 minimizationDocument25 pagesMathematics of Compressive Sensing: Sparse recovery using `1 minimizationAshwani SinghNo ratings yet
- Lecture 5 - A Particle in A BoxDocument8 pagesLecture 5 - A Particle in A BoxMartin MaguNo ratings yet
- Information Theory Problem 1Document4 pagesInformation Theory Problem 1paranoidandroid96No ratings yet
- KKT Conditions and Duality: March 23, 2012Document36 pagesKKT Conditions and Duality: March 23, 2012chgsnsaiNo ratings yet
- 2 - Discrete-Time Signals: 1 For 0 N N 1 0 OtherwiseDocument4 pages2 - Discrete-Time Signals: 1 For 0 N N 1 0 OtherwiseKhalil El LejriNo ratings yet
- 6 HandoutDocument5 pages6 Handoutaladar520No ratings yet
- 1. Poisson's Equation in 2D: T = κ∆T + q ρc - T = 0Document16 pages1. Poisson's Equation in 2D: T = κ∆T + q ρc - T = 0Mostak Shahriar MomitNo ratings yet
- homework1Document3 pageshomework1Anh HoangNo ratings yet
- Cost Minimization and the Cost FunctionDocument36 pagesCost Minimization and the Cost Function040 Sahera AkterNo ratings yet
- One Nonlinear Equation and Its Numerical Solution: Taylor Series Expansion About Point XDocument4 pagesOne Nonlinear Equation and Its Numerical Solution: Taylor Series Expansion About Point XPiyush SinghNo ratings yet
- PDE Steebs Partial PDFDocument139 pagesPDE Steebs Partial PDFThumper KatesNo ratings yet
- Tutorial 1 on Cauchy Sequences and LimitsDocument4 pagesTutorial 1 on Cauchy Sequences and LimitsYu Keung NgNo ratings yet
- Hilbert's Inequalities and Their ReversesDocument17 pagesHilbert's Inequalities and Their ReversesCristian DinuNo ratings yet
- BIE TitleDocument20 pagesBIE TitleKavi YaNo ratings yet
- NLP Lecture NoteDocument9 pagesNLP Lecture NoteVinay DuttaNo ratings yet
- Econometrica - 2022 - Alvarez - The Analytic Theory of A Monetary Shock - OADocument26 pagesEconometrica - 2022 - Alvarez - The Analytic Theory of A Monetary Shock - OA穆伯扬No ratings yet
- Sturm Liouville TheoremDocument1 pageSturm Liouville TheoremNoraedddNo ratings yet
- 138.65 Shell and Tube I&oDocument6 pages138.65 Shell and Tube I&oAndy ChongNo ratings yet
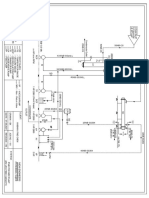
- 001 101 Pnid 250LPH 07 09 2021Document1 page001 101 Pnid 250LPH 07 09 2021DeepikaNo ratings yet
- Agitator Data Sheet Stelzer Rührtechnik International GMBH: CompanyDocument1 pageAgitator Data Sheet Stelzer Rührtechnik International GMBH: CompanyDeepikaNo ratings yet
- 1 Cheat Sheet - Google Account Setup: Creating andDocument13 pages1 Cheat Sheet - Google Account Setup: Creating andDeepikaNo ratings yet
- Rainforcement of NozzleDocument4 pagesRainforcement of NozzleDeepikaNo ratings yet
- Pressure Recovery & Cavitation: ABB Control Valves Technical SupportDocument16 pagesPressure Recovery & Cavitation: ABB Control Valves Technical SupportDeepikaNo ratings yet
- General Spec - Feed HeaterDocument9 pagesGeneral Spec - Feed HeaterDeepikaNo ratings yet
- Main parts and nozzles used in equipment manufacturingDocument17 pagesMain parts and nozzles used in equipment manufacturingDeepikaNo ratings yet
- Pressure Vessels - An IntroductionDocument45 pagesPressure Vessels - An IntroductionDeepika100% (1)
- The Language of Email PDFDocument27 pagesThe Language of Email PDFDeepikaNo ratings yet
- Evaporative and AirCooled Report PDFDocument62 pagesEvaporative and AirCooled Report PDFSantanu KararNo ratings yet
- SeltosBrochure20 Mobile-Share CompressedDocument19 pagesSeltosBrochure20 Mobile-Share CompressedPrasanth NavaNo ratings yet
- Flame Arrester Technical FormDocument7 pagesFlame Arrester Technical FormHmd MokhtariNo ratings yet
- BABY ANIMALS WORKSHEET FOR CLASS 1 STUDENTSDocument4 pagesBABY ANIMALS WORKSHEET FOR CLASS 1 STUDENTSDeepikaNo ratings yet
- IMP WebDocument48 pagesIMP WebDeepikaNo ratings yet
- IMP WebDocument48 pagesIMP WebDeepikaNo ratings yet
- Samenvatting Sterkteleer BASFDocument86 pagesSamenvatting Sterkteleer BASFdroessaert_stijnNo ratings yet
- WDS Gas Strut Calculation Strut ForcesDocument1 pageWDS Gas Strut Calculation Strut ForcesDeepikaNo ratings yet
- Solar Air Preheat PIV Design+Installation Checklist V2Document4 pagesSolar Air Preheat PIV Design+Installation Checklist V2DeepikaNo ratings yet
- 114X4302Document6 pages114X4302DeepikaNo ratings yet
- Kern Method Heat ExchangerDocument30 pagesKern Method Heat ExchangerCS100% (3)
- How To Do A Dynamic AnalysisDocument15 pagesHow To Do A Dynamic AnalysisJaga NathNo ratings yet
- MED Complete ListDocument126 pagesMED Complete ListprakashsahooNo ratings yet
- Rishabh DC MeterDocument8 pagesRishabh DC MeterDeepikaNo ratings yet
- Viscosity Guide ChartDocument2 pagesViscosity Guide ChartDeepikaNo ratings yet
- R-22 HarmfulDocument8 pagesR-22 HarmfulhiteshgmechNo ratings yet
- Food and Bio Process EngineeringDocument24 pagesFood and Bio Process EngineeringRosane Cavalcante100% (1)
- 20 Analysis Journal PDFDocument4 pages20 Analysis Journal PDFDeepikaNo ratings yet
- Cone DesignDocument2 pagesCone DesignDeepikaNo ratings yet
- Maths Homework Project Year 4Document8 pagesMaths Homework Project Year 4afeuwbdev100% (1)
- Vastu House PlanDocument187 pagesVastu House Planshilpa shahNo ratings yet
- Chapter-10 - Biomechanics in Sports Class 12Document29 pagesChapter-10 - Biomechanics in Sports Class 12Matrix craft4100% (1)
- Reliability Centered Maintenance (RCM)Document6 pagesReliability Centered Maintenance (RCM)Hoang Thanh VanNo ratings yet
- PC200-8 SM - 013 Troubleshooting by Failure Code Part-3Document50 pagesPC200-8 SM - 013 Troubleshooting by Failure Code Part-3t5442071100% (2)
- Memo-on-Orientation and Submission of PNPKIDocument5 pagesMemo-on-Orientation and Submission of PNPKICoronia Mermaly LamsenNo ratings yet
- Cycle1 Parta GettingtoknowyourstudentsDocument7 pagesCycle1 Parta Gettingtoknowyourstudentsapi-295073409No ratings yet
- Call Log ReportDocument44 pagesCall Log ReportHun JhayNo ratings yet
- Practical Training Seminar Report FormatDocument8 pagesPractical Training Seminar Report FormatShrijeet PugaliaNo ratings yet
- 22-02-13 Samsung Answer To Staton Techniya Complaint & CounterclaimsDocument72 pages22-02-13 Samsung Answer To Staton Techniya Complaint & CounterclaimsFlorian MuellerNo ratings yet
- Cosmos Carl SaganDocument18 pagesCosmos Carl SaganRabia AbdullahNo ratings yet
- Data Table CarbonDocument2 pagesData Table Carbonyodaswarrior33% (15)
- jrc122457 Dts Survey Deliverable Ver. 5.0-3Document46 pagesjrc122457 Dts Survey Deliverable Ver. 5.0-3Boris Van CyrulnikNo ratings yet
- Nucleus ERPDocument3 pagesNucleus ERPdimensionone1No ratings yet
- CatalogDocument12 pagesCatalogjonz afashNo ratings yet
- Ficha de Seguridad Dispositivo Pruba Doble Recamara 2875 - 2876Document133 pagesFicha de Seguridad Dispositivo Pruba Doble Recamara 2875 - 2876janetth rubianoNo ratings yet
- Batch/Discontinuous Bleaching Process PresentationDocument9 pagesBatch/Discontinuous Bleaching Process PresentationSm Mahiuddin RaselNo ratings yet
- Writing Visual Basic ProjectsDocument1 pageWriting Visual Basic ProjectsAmmuKuttyNo ratings yet
- How to Critique a Work in 40 StepsDocument16 pagesHow to Critique a Work in 40 StepsGavrie TalabocNo ratings yet
- Madd Powerpoint 1Document17 pagesMadd Powerpoint 1api-457366947No ratings yet
- Group Case Study: Premier Automotive Services LimitedDocument2 pagesGroup Case Study: Premier Automotive Services LimitedKryzel Jean Tumbaga ValdezNo ratings yet
- SC Project Closeout Report v6Document27 pagesSC Project Closeout Report v6SateeshIngoleNo ratings yet
- Phrase Structure AnalysisDocument2 pagesPhrase Structure Analysismerlino99No ratings yet
- MCC-2 (Intermediate & Finishing Mill)Document17 pagesMCC-2 (Intermediate & Finishing Mill)Himanshu RaiNo ratings yet
- Philippine Legal CitationDocument72 pagesPhilippine Legal CitationArwella GregorioNo ratings yet
- Piperack Design PhiloshipyDocument10 pagesPiperack Design PhiloshipyGautam PaulNo ratings yet
- RV RVR en 0714 Edit PDFDocument6 pagesRV RVR en 0714 Edit PDFJacques FerreiraNo ratings yet
- Word ShortcutsDocument3 pagesWord ShortcutsRaju BNo ratings yet
- Four Process StrategyDocument10 pagesFour Process StrategyChandria FordNo ratings yet
- Blood Smear PreparationDocument125 pagesBlood Smear PreparationKim RuizNo ratings yet