You might also like
- Compact EN PDFDocument8 pagesCompact EN PDFvan long BuiNo ratings yet
- Gta 2 ManualDocument8 pagesGta 2 ManualJimmywootNo ratings yet
- Warning: Installation and Operation Manual For Murphy Display and Diagnostic Module (MDDM)Document9 pagesWarning: Installation and Operation Manual For Murphy Display and Diagnostic Module (MDDM)Yasir MehmoodNo ratings yet
- Demag DF 115p Wheel PaverDocument174 pagesDemag DF 115p Wheel PaverHữu Dũng Nguyễn100% (5)
- EMS2 DeutzDocument42 pagesEMS2 DeutzLuis Segovia Cortes63% (8)
- Deutz Emr2-Volvoec140b PDFDocument606 pagesDeutz Emr2-Volvoec140b PDFchristram86% (7)
- Manual SerDia2010 enDocument235 pagesManual SerDia2010 eneduargon.94No ratings yet
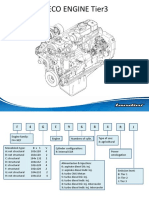
- Iveco Engine T3Document33 pagesIveco Engine T3Marian Taras100% (1)
- Manual ENG SerDia2010 V1.8 Level1 310512 PDFDocument127 pagesManual ENG SerDia2010 V1.8 Level1 310512 PDFEnergoCentr100% (4)
- 0297 9885 De/en: Systembeschreibung Elektronischer Motor-Regler System Description Electronic Engine GovernorDocument61 pages0297 9885 De/en: Systembeschreibung Elektronischer Motor-Regler System Description Electronic Engine Governorcarlos torres80% (5)
- BFM1013 MVS Workshop Manual 03123294 enDocument104 pagesBFM1013 MVS Workshop Manual 03123294 enSergiy DubynaNo ratings yet
- Apresentacao PCC1301 DisplayDocument32 pagesApresentacao PCC1301 DisplayJaffer HussainNo ratings yet
- CEM 7CEA 7CEC 7CEM7 + CEC7Manual start•xx•Manual stop•xx•Automatic start••x•Automatic stop••x•Remote startx•xxRemote stopx•xxCEM 7CEA 7CEC 7CEM7 + CEC7Mains failureDocument13 pagesCEM 7CEA 7CEC 7CEM7 + CEC7Manual start•xx•Manual stop•xx•Automatic start••x•Automatic stop••x•Remote startx•xxRemote stopx•xxCEM 7CEA 7CEC 7CEM7 + CEC7Mains failureMd MoniruzzamanNo ratings yet
- TL470 6990102 enGB OmDocument194 pagesTL470 6990102 enGB Ommetin bulatNo ratings yet
- Connect Bosch EDC17CV42 to GPTDocument5 pagesConnect Bosch EDC17CV42 to GPTHumberto Cadori FilhoNo ratings yet
- Woodward Dyna 8000 8200 8400 - Technical Manual - en - 2017 PDFDocument18 pagesWoodward Dyna 8000 8200 8400 - Technical Manual - en - 2017 PDFangel aguilarNo ratings yet
- Operator Manual M43Document288 pagesOperator Manual M43Anne S. Sokolovska100% (1)
- C13 Technical and Repair Manual OverviewDocument240 pagesC13 Technical and Repair Manual Overviewgluyk100% (1)
- Welding of P91Document37 pagesWelding of P91nishant361100% (4)
- EMR 4 CAN BUS Specification OverviewDocument71 pagesEMR 4 CAN BUS Specification OverviewKrzysztof BrękNo ratings yet
- Operating Instructions: Diesel Engine 12V2000M91 16V2000M91Document169 pagesOperating Instructions: Diesel Engine 12V2000M91 16V2000M91Bruna Rahd100% (1)
- DEUTZ Service Engine Electronic PDFDocument2 pagesDEUTZ Service Engine Electronic PDFEdwin Alfonso Hernandez MontesNo ratings yet
- Deutz EMR2 Electronic Engine GovernorDocument60 pagesDeutz EMR2 Electronic Engine GovernorCláudio Lima88% (34)
- EMR 3 Training - DeutzDocument79 pagesEMR 3 Training - DeutzVilchez Leo HernánNo ratings yet
- Volvo Penta TAD732GEDocument2 pagesVolvo Penta TAD732GECeleste TheronNo ratings yet
- EMR4-TIER4i CAN PDFDocument72 pagesEMR4-TIER4i CAN PDFEng-AhmedRashadNo ratings yet
- Diagnosis Section 3Document60 pagesDiagnosis Section 3André Alfacinha100% (2)
- Bomag BW216D-4Document2 pagesBomag BW216D-4ibilge0% (1)
- Ch6 COMMUNICATION PROTOCOLS PDFDocument52 pagesCh6 COMMUNICATION PROTOCOLS PDFalejandro sanchezNo ratings yet
- PIB4168 DPG100 - 101 Series PDFDocument3 pagesPIB4168 DPG100 - 101 Series PDFUNIPOWER2013100% (1)
- Motores ManDocument70 pagesMotores ManJavierNo ratings yet
- Workshop Manual TCD2013L042V DEUTZDocument152 pagesWorkshop Manual TCD2013L042V DEUTZKatuwal Bandhu100% (1)
- Deutz BF6M1015 Technical DataDocument3 pagesDeutz BF6M1015 Technical DataMuhammad rizkiNo ratings yet
- Deutz - Emr3 CAN BUS - Specification.v11.3Document53 pagesDeutz - Emr3 CAN BUS - Specification.v11.3Guido Giovanni Franco RodriguezNo ratings yet
- Deutz - Emr3 CAN BUS - Specification.v11.3Document53 pagesDeutz - Emr3 CAN BUS - Specification.v11.3Guido Giovanni Franco RodriguezNo ratings yet
- Induction Motor Connection Diagrams and Brake WiringDocument38 pagesInduction Motor Connection Diagrams and Brake WiringCris DucusinNo ratings yet
- EMR3 все необходимоеDocument65 pagesEMR3 все необходимоеЛюбовь БазуеваNo ratings yet
- Maintenance Manual: MAN Industrial Diesel Engines D2862 LE221/223/231/233Document81 pagesMaintenance Manual: MAN Industrial Diesel Engines D2862 LE221/223/231/233Camilo Puentes100% (2)
- DG 04 003-E 08-04 Formular Communication OrderDocument17 pagesDG 04 003-E 08-04 Formular Communication OrderLuis JesusNo ratings yet
- EMR2 Flyer enDocument6 pagesEMR2 Flyer enEloy Cabrera100% (3)
- 1300 EDi Genset - Programmable - 32Document2 pages1300 EDi Genset - Programmable - 32Dieselmotors ManNo ratings yet
- Install - Deutz EURO 6 AdBlue EmulatorDocument2 pagesInstall - Deutz EURO 6 AdBlue EmulatorValentin AndrenoiuNo ratings yet
- Technical Data: @perkinsDocument6 pagesTechnical Data: @perkinsLakshan Weliwatta100% (1)
- 522 Op ManualDocument20 pages522 Op ManualAhmed Abdullah100% (1)
- Priamos I SeriesDocument59 pagesPriamos I SeriesReza NadianNo ratings yet
- 1.2.4 MAN Marine Commercial EnginesDocument56 pages1.2.4 MAN Marine Commercial EnginesAdrian Chacon Molina100% (1)
- CT365 CT400S (QSG12 50Hz)Document3 pagesCT365 CT400S (QSG12 50Hz)Md ShNo ratings yet
- Agc 150 Generator Mains BTB Data Sheet 4921240618 UkDocument36 pagesAgc 150 Generator Mains BTB Data Sheet 4921240618 UkEdwin PinzonNo ratings yet
- 2306A Manual de Diagnotico PDFDocument156 pages2306A Manual de Diagnotico PDFMeriem ZAGRIRINo ratings yet
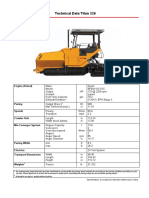
- Abg Titan 226 PDFDocument2 pagesAbg Titan 226 PDFkrisornNo ratings yet
- 6125HF070CDocument2 pages6125HF070ClilireneNo ratings yet
- E 94 004-E 01-07 E2000 PDFDocument64 pagesE 94 004-E 01-07 E2000 PDFManish SaraswatNo ratings yet
- KM376 ENGINE Maintenance ManalDocument38 pagesKM376 ENGINE Maintenance Manalluis gomezNo ratings yet
- DACTS705 English PDFDocument21 pagesDACTS705 English PDFgiapy0000No ratings yet
- Installation Guide For Diesel EnginesDocument250 pagesInstallation Guide For Diesel EnginesJose FavaNo ratings yet
- Operation & Maintenance: Paver Finisher Dynapac SD1800WDocument468 pagesOperation & Maintenance: Paver Finisher Dynapac SD1800WKrzysztof BrękNo ratings yet
- PM2000 SchematicsDocument18 pagesPM2000 SchematicsThilina JayasingheNo ratings yet
- Operation ManualDocument116 pagesOperation ManualMajdNo ratings yet
- Dedalus - DegelmanDocument267 pagesDedalus - DegelmanYahya KhadhraNo ratings yet
- Bluetooth RS232 Serial Adapter Manual Document Version: 1.3 Firmware Version: 6.5xDocument23 pagesBluetooth RS232 Serial Adapter Manual Document Version: 1.3 Firmware Version: 6.5xMauricio Palacios BazaNo ratings yet
- Volvo Penta CAN bus parameters and message framesDocument31 pagesVolvo Penta CAN bus parameters and message framesTTIBCCANo ratings yet
- J1587/J1708—Diagnostic Trouble Codes (DTC) CANADIAN AUTOMOTIVE INSTRUMENTS LTDDocument3 pagesJ1587/J1708—Diagnostic Trouble Codes (DTC) CANADIAN AUTOMOTIVE INSTRUMENTS LTDFaraz ElectronicNo ratings yet
- BC04Document21 pagesBC04HFGEMINISNo ratings yet
- Etherlink Ii Adapter Technical Reference Manual: A Member of The Etherlink Product FamilyDocument56 pagesEtherlink Ii Adapter Technical Reference Manual: A Member of The Etherlink Product Familyantonius0990No ratings yet
- Technical SpecificationDocument10 pagesTechnical SpecificationAnonymous RcxX0FcNo ratings yet
- Minicas: Minicas Ii - Technical Data: DescriptionDocument6 pagesMinicas: Minicas Ii - Technical Data: DescriptionAnonymous RcxX0FcNo ratings yet
- Installation Instructions: Protector Trip Relays Panel Mounted 262 Series Current, Voltage & FrequencyDocument2 pagesInstallation Instructions: Protector Trip Relays Panel Mounted 262 Series Current, Voltage & FrequencyAnonymous RcxX0FcNo ratings yet
- Technical Specification: DescriptionDocument2 pagesTechnical Specification: DescriptionAnonymous RcxX0FcNo ratings yet
- SPR System Protection, Control and Measurement Relay: OperationDocument5 pagesSPR System Protection, Control and Measurement Relay: OperationAnonymous RcxX0FcNo ratings yet
- Installation Instructions: Protector Trip Relays DIN Rail & Wall Mounted 250 Series Paralleling & Reverse PowerDocument8 pagesInstallation Instructions: Protector Trip Relays DIN Rail & Wall Mounted 250 Series Paralleling & Reverse PowerAnonymous RcxX0FcNo ratings yet
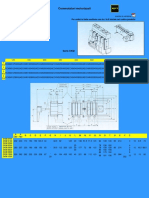
- Commutatori motorizzati e motori elettriciDocument4 pagesCommutatori motorizzati e motori elettriciAnonymous RcxX0FcNo ratings yet
- Installation and Operating Instructions Gen-Key: Energy DivisionDocument22 pagesInstallation and Operating Instructions Gen-Key: Energy DivisionAnonymous RcxX0FcNo ratings yet
- Installation and Operating Instructions R.O.C.O.F Protection RelayDocument24 pagesInstallation and Operating Instructions R.O.C.O.F Protection RelayBilal ŞimşekNo ratings yet
- Overview Air en PDFDocument17 pagesOverview Air en PDFAnonymous RcxX0FcNo ratings yet
- Installation and Operating Instructions KEY-START Series: Energy DivisionDocument20 pagesInstallation and Operating Instructions KEY-START Series: Energy DivisionAnonymous RcxX0FcNo ratings yet
- Gen SoftDocument1 pageGen SoftAhmed Sherif CupoNo ratings yet
- BP 305 Range Product Information en A2017Document2 pagesBP 305 Range Product Information en A2017Anonymous RcxX0FcNo ratings yet
- Installation and Operating Instructions Synchro-Check Monitor PLL/D-100/120, PLL/D-173/240, PLL/D-380/480, DIN-rail MountedDocument2 pagesInstallation and Operating Instructions Synchro-Check Monitor PLL/D-100/120, PLL/D-173/240, PLL/D-380/480, DIN-rail MountedAnonymous RcxX0FcNo ratings yet
- Cutout HT50 PDFDocument1 pageCutout HT50 PDFAnonymous RcxX0FcNo ratings yet
- H-T50 Installation ManualDocument24 pagesH-T50 Installation ManualAnonymous RcxX0FcNo ratings yet
- Axsp3p01 1Document2 pagesAxsp3p01 1Anonymous g5beXbnOpTNo ratings yet
- Datasheet EAM114Document3 pagesDatasheet EAM114RobiNo ratings yet
- Power Supply Systems Spds Type 2: Dehnguard® Modular Dgmtns275Document2 pagesPower Supply Systems Spds Type 2: Dehnguard® Modular Dgmtns275Anonymous RcxX0FcNo ratings yet
- Ignition SwitchDocument1 pageIgnition SwitchAnonymous RcxX0FcNo ratings yet
- BP 305 Range Product Information en A2017Document2 pagesBP 305 Range Product Information en A2017Anonymous RcxX0FcNo ratings yet
- DECS100 Product BulletinDocument8 pagesDECS100 Product BulletinAnonymous g5beXbnOpTNo ratings yet
- Overview Air en PDFDocument17 pagesOverview Air en PDFAnonymous RcxX0FcNo ratings yet
- Ignition SwitchDocument1 pageIgnition SwitchAnonymous RcxX0FcNo ratings yet
- Inrush Current Reduction Module: ICRM-7, ICRM-15Document4 pagesInrush Current Reduction Module: ICRM-7, ICRM-15Anonymous g5beXbnOpTNo ratings yet
- Battery Charger Range Technical Documentation en c2017 PDFDocument24 pagesBattery Charger Range Technical Documentation en c2017 PDFAnonymous RcxX0FcNo ratings yet
- Voltage Regulator DECS-100 ManuelDocument81 pagesVoltage Regulator DECS-100 Manuelctsak100% (1)
- Unit V Processes and Operating SystemsDocument37 pagesUnit V Processes and Operating SystemsManikandan Annamalai100% (1)
- Dissertation Concours Capitaine PompierDocument5 pagesDissertation Concours Capitaine PompierPaperWritingHelpSyracuse100% (1)
- Before & After Magazine - 0269 - What's The Right Typeface For Text - Before & After MagazineDocument13 pagesBefore & After Magazine - 0269 - What's The Right Typeface For Text - Before & After MagazineTran Duc HaiNo ratings yet
- The Future of TSN in Industrial NetworksDocument27 pagesThe Future of TSN in Industrial NetworksVishwa MohanNo ratings yet
- Run WordcountDocument3 pagesRun WordcountKhushi PatilNo ratings yet
- Page 44Document1 pagePage 44Abhishek ShatagopachariNo ratings yet
- CDS VAM® 21 9.625in. 47lb-ft L80 Type 1 API Drift 8.525in. 87.5%Document1 pageCDS VAM® 21 9.625in. 47lb-ft L80 Type 1 API Drift 8.525in. 87.5%Budi INo ratings yet
- B. Tech. 1 Year (Civil) Solid Mechanics (CEN-102) Tutorial Sheet 4: Torsion, Shear Force and Bending MomentDocument4 pagesB. Tech. 1 Year (Civil) Solid Mechanics (CEN-102) Tutorial Sheet 4: Torsion, Shear Force and Bending MomentKumar ShivamNo ratings yet
- RER615 DNP3 Point List ManualDocument136 pagesRER615 DNP3 Point List ManualРоман ВоеводаNo ratings yet
- CTS New CatalogueDocument1 pageCTS New CatalogueLim EugeneNo ratings yet
- 3 - 1 - 2 List of Parts - Power Bee 2018-04-20 ENDocument24 pages3 - 1 - 2 List of Parts - Power Bee 2018-04-20 ENРухулла АгакеримовNo ratings yet
- Oakridge International School: Student Grade Report SystemDocument29 pagesOakridge International School: Student Grade Report SystemTales Of TanviNo ratings yet
- Electrical Machines II: Ahmed Mortuza SalequeDocument14 pagesElectrical Machines II: Ahmed Mortuza SalequeAhsan Kabir NuhelNo ratings yet
- Unit 8Document4 pagesUnit 8Bảo VũNo ratings yet
- Sanitary Clean Steam SeperatorDocument2 pagesSanitary Clean Steam SeperatorShahid AhmedNo ratings yet
- Assembling and Operating Instructions Control Udl 2: Montage - Und Bedienungsanleitung Steuerung Udl 2Document20 pagesAssembling and Operating Instructions Control Udl 2: Montage - Und Bedienungsanleitung Steuerung Udl 2Djo100% (1)
- Low Current Foreman TestsDocument12 pagesLow Current Foreman TestsSUNDAR TNo ratings yet
- Unit I Lesson 4 Computing The Variance of A Discrete Probability DistributionDocument23 pagesUnit I Lesson 4 Computing The Variance of A Discrete Probability DistributionKira MilestoneNo ratings yet
- Nespreneur Brochure NIFTEMDocument12 pagesNespreneur Brochure NIFTEMabhirajNo ratings yet
- Battery Report: Installed BatteriesDocument8 pagesBattery Report: Installed BatteriesSyafiQah MirrahNo ratings yet
- Juan Carlos Rodriguez Jimenez C.C 79.786.948 Industrial Engineer, MBA Spe. Computerize Industry and SimulationDocument3 pagesJuan Carlos Rodriguez Jimenez C.C 79.786.948 Industrial Engineer, MBA Spe. Computerize Industry and SimulationPaula TamayoNo ratings yet
- TE-6300 Series Temperature Sensors: DescriptionDocument4 pagesTE-6300 Series Temperature Sensors: DescriptionÖzgürNo ratings yet
- GSM PRD BA.50 v5.0 Technology Neutral Agreements HandbookDocument36 pagesGSM PRD BA.50 v5.0 Technology Neutral Agreements HandbookBrimstone HideNo ratings yet
- Trimac Booth# 2A91Document1 pageTrimac Booth# 2A91mohamadNo ratings yet
- Bas 416Document6 pagesBas 416Adrian ZekthiNo ratings yet
- Promoting Digital InclusivityDocument12 pagesPromoting Digital InclusivityFrench Mariee P. EdangNo ratings yet
- Special Issue - 2015 International Journal of Engineering Research & Technology (IJERT) Position and Speed Control of BLDC MotorDocument3 pagesSpecial Issue - 2015 International Journal of Engineering Research & Technology (IJERT) Position and Speed Control of BLDC MotorDONE AND DUSTEDNo ratings yet
- CHAPTER 6 - 7 PadinDocument4 pagesCHAPTER 6 - 7 Padinpadin.jcNo ratings yet