100% found this document useful (3 votes)
3K views57 pagesUnit 4
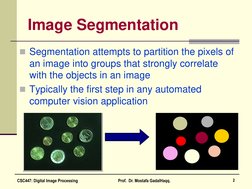
Image segmentation algorithms partition an image into groups of pixels that correlate with real-world objects. Segmentation is typically the first step in computer vision applications. The main approaches are based on discontinuities, which partition based on abrupt intensity changes like edges, and similarity, which groups similarly intense regions. Common techniques include thresholding, edge detection using gradient operators like Sobel, and the Hough transform for global line detection. Region-based methods group connected similarly intense pixels into regions.
Uploaded by
PoongodiCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
100% found this document useful (3 votes)
3K views57 pagesUnit 4
Image segmentation algorithms partition an image into groups of pixels that correlate with real-world objects. Segmentation is typically the first step in computer vision applications. The main approaches are based on discontinuities, which partition based on abrupt intensity changes like edges, and similarity, which groups similarly intense regions. Common techniques include thresholding, edge detection using gradient operators like Sobel, and the Hough transform for global line detection. Region-based methods group connected similarly intense pixels into regions.
Uploaded by
PoongodiCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
- Image Segmentation: Explains the concept of image segmentation as the grouping of pixels for automated vision applications.
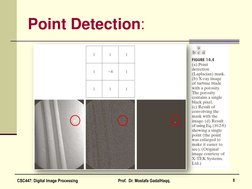
- Point Detection: Covers the process and methodology for isolating significant points within an image using specific criteria.
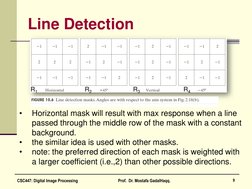
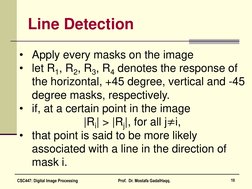
- Line Detection: Details the identification of lines within images using horizontal, vertical and angular masks, along with thresholding techniques.
- Edge Detection Approach: Discusses edge detection as a critical part of segmentation, focusing on pixel boundaries and gradients.
- The Laplacian and Related Techniques: Introduces the Laplacian method for edge detection including Gaussian approaches, presenting mathematical formulations and visual results.
- The Hough Transform: Presents the Hough Transform as a global processing technique for detecting shapes in images through parameter space analysis.
- Region-Based Segmentation: Contrasts region-based segmentation methods with edge-based, noting practical applications in image interpretation.
- Image Thresholding: Describes various thresholding methods including automatic and adaptive techniques, focusing on how these improve segmentation.