You might also like
- Lab 1 Construction of A Logic Probe: ObjectivesDocument9 pagesLab 1 Construction of A Logic Probe: ObjectivesPramote RodbonNo ratings yet
- BSM525-550M10-72HPH Mono PercDocument2 pagesBSM525-550M10-72HPH Mono PercAusNo ratings yet
- The Origin of the UK BS 1363 Plug and Socket Outlet SystemDocument3 pagesThe Origin of the UK BS 1363 Plug and Socket Outlet SystemMuhammed Talha QureshiNo ratings yet
- Ge Af300 P11 InverterDocument156 pagesGe Af300 P11 InverterOGNo ratings yet
- Quadra NT X-Ray Tube and High Voltage Power Supply Installation GuideDocument39 pagesQuadra NT X-Ray Tube and High Voltage Power Supply Installation GuideRaj100% (1)
- BBL Crane and Hoist Duty MotorsDocument9 pagesBBL Crane and Hoist Duty MotorsHarish KumarNo ratings yet
- Thermal Protection of Undocumented AC Motors: Ed Lebenhaft and Mark ZellerDocument8 pagesThermal Protection of Undocumented AC Motors: Ed Lebenhaft and Mark ZellerSlobodan SavicNo ratings yet
- Control and Protection of HV MotorsDocument28 pagesControl and Protection of HV Motorstkdrt2166No ratings yet
- Optimal Load Restoration in Active Distribution Networks Complying with Starting Transients of Induction MotorsDocument12 pagesOptimal Load Restoration in Active Distribution Networks Complying with Starting Transients of Induction Motorsany tasnimNo ratings yet
- 5KVA Inverter Boost H-BridgeDocument8 pages5KVA Inverter Boost H-BridgeThèm Khát100% (1)
- Sobretensões - Persson (1992)Document7 pagesSobretensões - Persson (1992)AndréNo ratings yet
- Load Characteristics of a Three Phase Induction MotorDocument14 pagesLoad Characteristics of a Three Phase Induction MotorMubin LikhonNo ratings yet
- Kbic 0719Document2 pagesKbic 0719Giorgi AbashidzeNo ratings yet
- TMGB 275Document3 pagesTMGB 275Andrew VitalNo ratings yet
- SCR y Triac de Aplicacion AutomotrizDocument9 pagesSCR y Triac de Aplicacion AutomotrizRomel RivadeneiraNo ratings yet
- Design and Simulation of Triggering Circ PDFDocument4 pagesDesign and Simulation of Triggering Circ PDFYimy GarciaNo ratings yet
- Starting Time Calculation For Induction Motor.: Abhishek Garg, Arun Singh TomarDocument5 pagesStarting Time Calculation For Induction Motor.: Abhishek Garg, Arun Singh TomarBhavik PrajapatiNo ratings yet
- 10620-Eng-01-A Prąd Rozruchowy Na FlukeDocument2 pages10620-Eng-01-A Prąd Rozruchowy Na FlukeTomasz Artur JachymekNo ratings yet
- Gino-Aka: Industrial AutomationDocument8 pagesGino-Aka: Industrial Automationhsouna nasfiNo ratings yet
- Design Data Sheet (ID Fan Motor 800 KW)Document4 pagesDesign Data Sheet (ID Fan Motor 800 KW)Swarup Nayak100% (1)
- Motor Protective Settings1Document22 pagesMotor Protective Settings1MaheswariNo ratings yet
- An Ultra Sparse Matrix Converter with a Novel Active Clamp CircuitDocument8 pagesAn Ultra Sparse Matrix Converter with a Novel Active Clamp CircuitAmal P NirmalNo ratings yet
- Traction Drive HES880 - Flyer - 3AUA0000161471 - RevF - EN PDFDocument2 pagesTraction Drive HES880 - Flyer - 3AUA0000161471 - RevF - EN PDFjalilemadiNo ratings yet
- Model CM6A CM12A Charge MasterDocument1 pageModel CM6A CM12A Charge Masterkami_scribdNo ratings yet
- VCB Transients Study.Document6 pagesVCB Transients Study.Shiju Kp.No ratings yet
- Electric Drives and Their ControlDocument3 pagesElectric Drives and Their ControlNaren Singh TanwarNo ratings yet
- 200 - EE8552, EE6503 Power Electronics - Question Bank 3Document119 pages200 - EE8552, EE6503 Power Electronics - Question Bank 3NiteshNarukaNo ratings yet
- Machines Dcmotors 2 April 14Document20 pagesMachines Dcmotors 2 April 14Pola RismaNo ratings yet
- C250N6CB A042j412Document5 pagesC250N6CB A042j412hareudangNo ratings yet
- Cable Sizing Design Basis - DraftDocument11 pagesCable Sizing Design Basis - DraftIman Mukherjee100% (1)
- E 51 06 - 092017Document4 pagesE 51 06 - 092017Imtiyaz KhanNo ratings yet
- Data Sheet: Induction Motor Champion Series Motor Type: 1SE0 319-2NC80-Z SDocument1 pageData Sheet: Induction Motor Champion Series Motor Type: 1SE0 319-2NC80-Z SudayaNo ratings yet
- Pulse: Modulated InvertersDocument11 pagesPulse: Modulated InvertersBrahmananda Reddy TeegalaNo ratings yet
- 2UEB000487 v1 Drive On GeneratorDocument19 pages2UEB000487 v1 Drive On GeneratorSherifNo ratings yet
- ACS 100 ABB DriveDocument54 pagesACS 100 ABB DriveMAHESWARA RAO CHALLANo ratings yet
- An Overview of Ac Induction Motor Testing in Accordance With BS 4999 PART 143Document12 pagesAn Overview of Ac Induction Motor Testing in Accordance With BS 4999 PART 143Gourab SahaNo ratings yet
- MV Drive Evolution Brochure 2011 Lo-ResDocument28 pagesMV Drive Evolution Brochure 2011 Lo-Ressykimk8921No ratings yet
- 11 AC Induction Motor TestingDocument12 pages11 AC Induction Motor TestingrajNo ratings yet
- HCI534C/544C - Winding 311 Single Phase: Technical Data SheetDocument9 pagesHCI534C/544C - Winding 311 Single Phase: Technical Data SheetAhmed El-FayoumyNo ratings yet
- Reverse Power Protection of Alternator PDFDocument29 pagesReverse Power Protection of Alternator PDFjupiterox75% (4)
- Variable Speed DC Motor Controls For Shunt Wound, PM and AC/DC MotorsDocument2 pagesVariable Speed DC Motor Controls For Shunt Wound, PM and AC/DC MotorsLisaNo ratings yet
- Welding Machine Specifications PDFDocument4 pagesWelding Machine Specifications PDFrahmankhan8230% (1)
- Triac Applications - Great TheoryDocument48 pagesTriac Applications - Great TheoryJeff MaxwellNo ratings yet
- Modeling and Simulation of Saturated Induction Motors in Phase QuantitiesDocument8 pagesModeling and Simulation of Saturated Induction Motors in Phase Quantitiesnina kameniNo ratings yet
- DC Electronic Loads: Data SheetDocument6 pagesDC Electronic Loads: Data Sheetbi31415No ratings yet
- 37kW, 4P, IMB3, Brake Motor DatasheetDocument1 page37kW, 4P, IMB3, Brake Motor DatasheetsyamprasadNo ratings yet
- 20KVA Hipulse D - SIMHADRI POWER LTD.Document36 pages20KVA Hipulse D - SIMHADRI POWER LTD.seil iexNo ratings yet
- AGN 090 - Motor Starting FundamentalsDocument11 pagesAGN 090 - Motor Starting FundamentalsariwibowoNo ratings yet
- 1MRG008054 en Application Note Function Description For High Impedance Busbar ProtectionDocument13 pages1MRG008054 en Application Note Function Description For High Impedance Busbar ProtectionOsama Ahmad Chaudhary100% (1)
- Backup Supply: Electrical Design and ProtectionDocument30 pagesBackup Supply: Electrical Design and ProtectionVictor SaifiNo ratings yet
- SymCom MotorSaver Model 777Document4 pagesSymCom MotorSaver Model 777German Schwab100% (1)
- An Application of Matlab/Simulink For Speed Control of DC Series Motor Using Buck ConverterDocument5 pagesAn Application of Matlab/Simulink For Speed Control of DC Series Motor Using Buck ConverterArghya MukherjeeNo ratings yet
- DIAGRAMA - IW047 e IW048 - CMG - SGAT SeriesDocument21 pagesDIAGRAMA - IW047 e IW048 - CMG - SGAT Seriesjrgravinaig.com.br PauloNo ratings yet
- Cable CalculationDocument14 pagesCable CalculationmrusdiantoNo ratings yet
- DC Series Motor Speed ControlDocument38 pagesDC Series Motor Speed Controllakha ramNo ratings yet
- dg-sizing-of-generatorDocument23 pagesdg-sizing-of-generatorRamji RamakrishnanNo ratings yet
- Reverse Power (Current) RelayDocument3 pagesReverse Power (Current) RelayjaytamijNo ratings yet
- Motor Control Instruction Manual C880800-00Document12 pagesMotor Control Instruction Manual C880800-00RICHIHOTS2No ratings yet
- Problems Often Occur Because of The Words We Use To Describe A ProjectDocument83 pagesProblems Often Occur Because of The Words We Use To Describe A ProjectnarayanNo ratings yet
- Drives Basics ExplainedDocument83 pagesDrives Basics ExplainedMohamed AhmedNo ratings yet
- AdorDocument28 pagesAdorAnupamNo ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Digital Power Electronics and ApplicationsFrom EverandDigital Power Electronics and ApplicationsRating: 3.5 out of 5 stars3.5/5 (3)
- Pappankalan SMS Transformer & Blower InspectionDocument3 pagesPappankalan SMS Transformer & Blower InspectionManish KaushikNo ratings yet
- Sea Water Desalination Plant - MRPL: Commissioning Check SheetDocument6 pagesSea Water Desalination Plant - MRPL: Commissioning Check SheetManish KaushikNo ratings yet
- Commissioning Test Report For Protection Relay: PI/SQF/CCL/7SJ600/430 Pages: 1 of 2 Date: 14.09.2007Document2 pagesCommissioning Test Report For Protection Relay: PI/SQF/CCL/7SJ600/430 Pages: 1 of 2 Date: 14.09.2007Manish KaushikNo ratings yet
- BacTee recommends upgrades to automation system at Pappankalan plantDocument4 pagesBacTee recommends upgrades to automation system at Pappankalan plantManish KaushikNo ratings yet
- Panipat Ludhiana Varanasi: North ZoneDocument3 pagesPanipat Ludhiana Varanasi: North ZoneManish KaushikNo ratings yet
- Pappankalan SMS MCC Room Inspection ReportDocument3 pagesPappankalan SMS MCC Room Inspection ReportManish KaushikNo ratings yet
- BacTee recommends upgrades to automation system at Pappankalan plantDocument4 pagesBacTee recommends upgrades to automation system at Pappankalan plantManish KaushikNo ratings yet
- List of faulty material reportsDocument2 pagesList of faulty material reportsManish KaushikNo ratings yet
- Load List of Pappankalan Sms PlantDocument2 pagesLoad List of Pappankalan Sms PlantManish KaushikNo ratings yet
- Electrical Work Status CommissioningDocument2 pagesElectrical Work Status CommissioningManish KaushikNo ratings yet
- VFD Checklist Part 1Document1 pageVFD Checklist Part 1Manish KaushikNo ratings yet
- SMS Electrical Work StatusDocument2 pagesSMS Electrical Work StatusManish KaushikNo ratings yet
- Electrical Work Status CommissioningDocument2 pagesElectrical Work Status CommissioningManish KaushikNo ratings yet
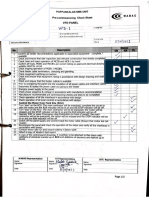
- APFC Panel Checklist Part 1Document1 pageAPFC Panel Checklist Part 1Manish KaushikNo ratings yet
- Monthly Report Kondli Oct-2021Document15 pagesMonthly Report Kondli Oct-2021Manish KaushikNo ratings yet
- Centrifuge SparesDocument27 pagesCentrifuge SparesManish KaushikNo ratings yet
- VFD With BreakerDocument8 pagesVFD With BreakerManish KaushikNo ratings yet
- VFD Checklist Part 2Document1 pageVFD Checklist Part 2Manish KaushikNo ratings yet
- Blower SparesDocument32 pagesBlower SparesManish KaushikNo ratings yet
- List of Faulty Material of BGEDocument2 pagesList of Faulty Material of BGEManish KaushikNo ratings yet
- Sea Water Desalination Plant - MRPL: Commissioning Check SheetDocument6 pagesSea Water Desalination Plant - MRPL: Commissioning Check SheetManish KaushikNo ratings yet
- 3.5core Copper Xlpe ArmouredDocument1 page3.5core Copper Xlpe ArmouredVinod LoboNo ratings yet
- Kondli Aeration Blower Motor Status On 01.10.2021Document3 pagesKondli Aeration Blower Motor Status On 01.10.2021Manish KaushikNo ratings yet
- Punch Points List of SMS PlantDocument6 pagesPunch Points List of SMS PlantManish KaushikNo ratings yet
- VATECH WABAG MRM REPORTDocument248 pagesVATECH WABAG MRM REPORTManish KaushikNo ratings yet
- 11 KV HT Panel - Loni 68 MLD MPS - GhaziabadDocument4 pages11 KV HT Panel - Loni 68 MLD MPS - GhaziabadManish KaushikNo ratings yet
- Power Gen - July-2021Document2 pagesPower Gen - July-2021Manish KaushikNo ratings yet
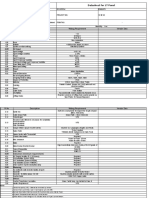
- O&M Panel Datasheet for STP Plant at GhaziabadDocument3 pagesO&M Panel Datasheet for STP Plant at GhaziabadManish KaushikNo ratings yet
- 12 MGD MRM Report Jan-2020Document156 pages12 MGD MRM Report Jan-2020Manish KaushikNo ratings yet
- InstallationGuide 530 531 532Document20 pagesInstallationGuide 530 531 532iiggoorNo ratings yet
- Datasheet lm124Document4 pagesDatasheet lm124Valdark Valente MdlNo ratings yet
- ELEC 3400 VI. Operational Amplifiers: 1. MOS Differential Pair With Resistive LoadsDocument21 pagesELEC 3400 VI. Operational Amplifiers: 1. MOS Differential Pair With Resistive Loadskidus100% (1)
- Over Current Protection Relay Using Pic Micro ControllerDocument25 pagesOver Current Protection Relay Using Pic Micro Controllersaranaccel1100% (1)
- Fuse Failure RelayDocument2 pagesFuse Failure RelayGanesh SantoshNo ratings yet
- Power ElectronicDocument66 pagesPower Electronicsalman shariff100% (1)
- Instrument Transformers GuideDocument11 pagesInstrument Transformers GuideIkhuosho AbodeNo ratings yet
- Pad Mount TransformerDocument46 pagesPad Mount TransformerHendrix LevaNo ratings yet
- Speed Sensor and Blockage Detector Data PDFDocument16 pagesSpeed Sensor and Blockage Detector Data PDFAhmad DagamsehNo ratings yet
- Primary Distribution Circuit-Breakers With Integrated Protection, Control and SensorsDocument4 pagesPrimary Distribution Circuit-Breakers With Integrated Protection, Control and SensorsKnjigescribdNo ratings yet
- Grade 10 Epas Tle q2w5-6Document4 pagesGrade 10 Epas Tle q2w5-6Fernando TamayoNo ratings yet
- LM111/LM211/LM311 Voltage ComparatorDocument23 pagesLM111/LM211/LM311 Voltage ComparatorlululalalulaluNo ratings yet
- Al-Balqa Applied University Power Systems Protection Course Overcurrent Relay SettingsDocument37 pagesAl-Balqa Applied University Power Systems Protection Course Overcurrent Relay SettingsNitesh KumarNo ratings yet
- 1SDA073700R1 Yu E1 2 E6 2 xt7 xt7m 220 240 Vac DCDocument3 pages1SDA073700R1 Yu E1 2 E6 2 xt7 xt7m 220 240 Vac DCahmed elsheikhNo ratings yet
- C604 VVVFDocument39 pagesC604 VVVFWander Gomes100% (2)
- LM2907 and LM2917 Frequency To Voltage Converter: FeaturesDocument42 pagesLM2907 and LM2917 Frequency To Voltage Converter: FeaturesHariman PurbaNo ratings yet
- Abb Price List 2012Document75 pagesAbb Price List 2012Sharafat Ali75% (4)
- Chapter 5 - ConsumerizationDocument51 pagesChapter 5 - ConsumerizationFaiz MohdNo ratings yet
- CRF-300 ManualDocument2 pagesCRF-300 ManualGONZALO FLORES LOPEZNo ratings yet
- Design and Test Analysis of Single-Phase Induction Motors With WindingDocument4 pagesDesign and Test Analysis of Single-Phase Induction Motors With WindingGuilherme GomesNo ratings yet
- Slides-Protecting Adc With Tvs DiodeDocument21 pagesSlides-Protecting Adc With Tvs Diodesinan akbaşNo ratings yet
- BDX 65Document4 pagesBDX 65mundomusicalmeriaNo ratings yet
- RT2Document3 pagesRT2Dragos NicolaeNo ratings yet
- Chap2 Special Machines PDFDocument13 pagesChap2 Special Machines PDFHell MaaxNo ratings yet
- IECEx BAS 14.0097X 003Document11 pagesIECEx BAS 14.0097X 003Marcos SiqueiraNo ratings yet