You might also like
- Project - Scarab - A Collector RobotDocument16 pagesProject - Scarab - A Collector RobotLeonardo AlexNo ratings yet
- Solar Panel Cleaning Robot Project ReportDocument3 pagesSolar Panel Cleaning Robot Project ReportNouman JavedNo ratings yet
- Solarbotics Photo Popper Kit May032007Document18 pagesSolarbotics Photo Popper Kit May032007keithdooleyNo ratings yet
- RESEARCH PAPER-1Document5 pagesRESEARCH PAPER-1aryan7321dNo ratings yet
- Lane-Following Robot Using Arduino: J-Component Project ReportDocument12 pagesLane-Following Robot Using Arduino: J-Component Project ReportIshan GuptaNo ratings yet
- Research Paper-1 (1)Document5 pagesResearch Paper-1 (1)aryan7321dNo ratings yet
- Autonomous Obstacle Avoiding and Path Following RoverDocument12 pagesAutonomous Obstacle Avoiding and Path Following RoverIndian MusicNo ratings yet
- Key Words - Arduino UNO, Motor Shield L293d, Ultrasonic Sensor HC-SR04, DCDocument17 pagesKey Words - Arduino UNO, Motor Shield L293d, Ultrasonic Sensor HC-SR04, DCBîswãjït NãyàkNo ratings yet
- Line Follower Robot Using ArduinoDocument12 pagesLine Follower Robot Using ArduinoPavithra VNo ratings yet
- Design and Implementation of A Multi-Robot System Based On Zigbee NetworkDocument5 pagesDesign and Implementation of A Multi-Robot System Based On Zigbee NetworkVô Hạ Thiên VươngNo ratings yet
- Farm Land Dangerous Radiation Material Detection Robot - 2Document7 pagesFarm Land Dangerous Radiation Material Detection Robot - 2aminuNo ratings yet
- Line Maze Solving RobotDocument18 pagesLine Maze Solving RobotAsitha Kulasekera0% (1)
- Line Following Robot ReviewDocument9 pagesLine Following Robot ReviewSree Krishna Nimmagadda ChowdaryNo ratings yet
- 21.line Following RobotDocument78 pages21.line Following RobotsathishNo ratings yet
- Final Report Spy Robot: Student Name: TA: Scott NortmanDocument14 pagesFinal Report Spy Robot: Student Name: TA: Scott NortmanManoj ManuNo ratings yet
- Differential drive robotic rover avoids obstaclesDocument7 pagesDifferential drive robotic rover avoids obstaclesEver TwinsNo ratings yet
- Obstacle Avoiding Robot Using Arduino: AbstractDocument5 pagesObstacle Avoiding Robot Using Arduino: AbstractWarna KlasikNo ratings yet
- Proposal Line FollowerDocument18 pagesProposal Line FollowerMelkamu SimenehNo ratings yet
- Line Follower Robot ThesisDocument5 pagesLine Follower Robot Thesisafktciaihzjfyr100% (1)
- Controls Final Final FinalDocument48 pagesControls Final Final FinalDan BautistaNo ratings yet
- Participation of Disability People To Working and Learning Envıronments With The Help of RobotsDocument10 pagesParticipation of Disability People To Working and Learning Envıronments With The Help of RobotsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Research Register 554 4016 1612220739 1Document28 pagesResearch Register 554 4016 1612220739 1Fayçal BEN HMIDANo ratings yet
- Mobile Robotics: (Self Study Report)Document25 pagesMobile Robotics: (Self Study Report)deepak_vk13No ratings yet
- Project Synopsis CVDocument3 pagesProject Synopsis CVKarthik N SNo ratings yet
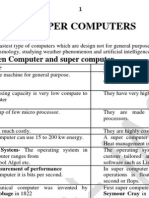
- Supercomputers and artificial intelligenceDocument3 pagesSupercomputers and artificial intelligenceshreeyogi100% (1)
- Automi Research PaperDocument4 pagesAutomi Research PaperHimanshu vermaNo ratings yet
- Follow Me RobotDocument8 pagesFollow Me RobotnguganNo ratings yet
- Monitoring and Controlling of Fire Fighthing Robot Using IOTDocument6 pagesMonitoring and Controlling of Fire Fighthing Robot Using IOTArun KumarNo ratings yet
- Gps Guided Autonomous RobotDocument44 pagesGps Guided Autonomous RobotHemanth DNo ratings yet
- Robotics - 2Document65 pagesRobotics - 2chandansonics06No ratings yet
- Obstacle Avoidance Robot Using Arduino IJERTCONV6IS13197Document4 pagesObstacle Avoidance Robot Using Arduino IJERTCONV6IS13197Xaf FarNo ratings yet
- Maze Solving Robot Using Freeduino and LSRB Algorithm: J.Arun Pandian, R.Karthick, B.KarthikeyanDocument9 pagesMaze Solving Robot Using Freeduino and LSRB Algorithm: J.Arun Pandian, R.Karthick, B.KarthikeyanDeac GeorgeNo ratings yet
- A Project Report On: "Line Follower Robot"Document35 pagesA Project Report On: "Line Follower Robot"Pradeep KumarNo ratings yet
- An Overview of Spy RobotDocument19 pagesAn Overview of Spy RobotNihaNo ratings yet
- Ijret - Implementation of Pid Control To Reduce Wobbling in A Line Following RobotDocument5 pagesIjret - Implementation of Pid Control To Reduce Wobbling in A Line Following RobotInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Smart and Intelligent Line Follower Robot Detects ObstaclesDocument6 pagesSmart and Intelligent Line Follower Robot Detects ObstaclesIndian MusicNo ratings yet
- Design and Implementation of Autonomous Photovore Robot With Obstacle Avoidance (MAE 4733 Term Final Project Report)Document27 pagesDesign and Implementation of Autonomous Photovore Robot With Obstacle Avoidance (MAE 4733 Term Final Project Report)shuvrabanikNo ratings yet
- RoboDocument27 pagesRoboCodeYt WithNo ratings yet
- B0610011017 PDFDocument8 pagesB0610011017 PDFEdiNo ratings yet
- Sensing BotDocument20 pagesSensing BotVanessa NitorNo ratings yet
- Arduino Hexapod Avoider RobotDocument16 pagesArduino Hexapod Avoider RobotALINE TEREZA DE PAULANo ratings yet
- Report IoT PDFDocument3 pagesReport IoT PDFArshNo ratings yet
- Presentation 14Document11 pagesPresentation 14ABHAY CHAUHANNo ratings yet
- Automated Line Follower RoboDocument18 pagesAutomated Line Follower RoboAnurag KumarNo ratings yet
- Research Paper 2Document5 pagesResearch Paper 2aryan7321dNo ratings yet
- Robot Mini ProjectDocument17 pagesRobot Mini Projectفهد العتيبيNo ratings yet
- Micro MouseDocument9 pagesMicro MouseenmocrNo ratings yet
- LINE FOLLOWER ROBOT SYNOPSISDocument14 pagesLINE FOLLOWER ROBOT SYNOPSISAshmeet SabbyNo ratings yet
- LINE FOLLOWING ROBOT Without Microcontrollers.Document11 pagesLINE FOLLOWING ROBOT Without Microcontrollers.حمایت علی قریشیNo ratings yet
- Arunai Engineering College: Robotics Micromouse On Open SourceDocument12 pagesArunai Engineering College: Robotics Micromouse On Open SourceMadhanmohan ChandrasekaranNo ratings yet
- Smart Room For Power Saving Using Image ProcessingDocument20 pagesSmart Room For Power Saving Using Image ProcessingAshu Ashu0% (1)
- Line FollowerDocument32 pagesLine FollowerAgniveshSatapathyNo ratings yet
- Developing an AI Micro Mouse to Solve Random MazesDocument9 pagesDeveloping an AI Micro Mouse to Solve Random MazesAdrian QuinteroNo ratings yet
- Simulation_studies_on_line_light_and_human_followiDocument25 pagesSimulation_studies_on_line_light_and_human_followiBizuneh getuNo ratings yet
- Sep08 t05 Robot SumardiDocument5 pagesSep08 t05 Robot SumardiIndra DppNo ratings yet
- Line FollowerDocument15 pagesLine FollowerShivam VaishnavNo ratings yet
- Microcontroller Based Line Following Robot: 25 MARCH, 2018 Balerobe, EthiopiaDocument10 pagesMicrocontroller Based Line Following Robot: 25 MARCH, 2018 Balerobe, EthiopiaBIniamNo ratings yet
- Robotics Study Material Google DocsDocument25 pagesRobotics Study Material Google DocsNikhil AgrawalNo ratings yet
- Exposure Mastery: Aperture, Shutter Speed & ISO: The Difference Between Good and Breathtaking PhotographsFrom EverandExposure Mastery: Aperture, Shutter Speed & ISO: The Difference Between Good and Breathtaking PhotographsRating: 5 out of 5 stars5/5 (1)
- Differences in voltage and current curves measured at a voltage source and resistorDocument1 pageDifferences in voltage and current curves measured at a voltage source and resistoreun mun kangNo ratings yet
- Lab Exer. 2 1Document4 pagesLab Exer. 2 1eun mun kangNo ratings yet
- Life and Work of Rizal PrelimDocument21 pagesLife and Work of Rizal PrelimJv OnaiPro50% (4)
- TechnopreneurshipDocument21 pagesTechnopreneurshipeun mun kangNo ratings yet
- Pintô Art Museum: Antipolo CityDocument18 pagesPintô Art Museum: Antipolo Cityeun mun kangNo ratings yet
- Research Title COVID-19 Personal Hygiene Emergency First AidDocument6 pagesResearch Title COVID-19 Personal Hygiene Emergency First Aideun mun kangNo ratings yet
- LotDocument6 pagesLoteun mun kangNo ratings yet
- Principles of Communication Exam: DIRECTION: Define The Following in Your Own Words. Minimum Probihited (Minus Points)Document2 pagesPrinciples of Communication Exam: DIRECTION: Define The Following in Your Own Words. Minimum Probihited (Minus Points)eun mun kangNo ratings yet
- Asimo Technical InformationDocument18 pagesAsimo Technical InformationhomersssNo ratings yet
- Define The Following Information Technology TrendsDocument4 pagesDefine The Following Information Technology Trendseun mun kangNo ratings yet
- Midterm For CorrectionDocument17 pagesMidterm For Correctioneun mun kangNo ratings yet
- Cisco-2 It6223Document23 pagesCisco-2 It6223eun mun kangNo ratings yet
- Comp 6103 Erc2 Final Laboratory RequirementsDocument1 pageComp 6103 Erc2 Final Laboratory Requirementseun mun kangNo ratings yet
- Life and Work of Rizal PrelimDocument21 pagesLife and Work of Rizal PrelimJv OnaiPro50% (4)
- The Business Plan FormatDocument11 pagesThe Business Plan Formateun mun kangNo ratings yet
- COMP 6103 - Midterm NotesDocument14 pagesCOMP 6103 - Midterm Noteseun mun kangNo ratings yet
- Pout = Pin x 10^(Gain/10)Pin = 0.6 WGain = 55 dB Pout = 0.6 x 10^(55/10) = 0.6 x 31622.8 = 190 kWThe output power is 190 kWDocument26 pagesPout = Pin x 10^(Gain/10)Pin = 0.6 WGain = 55 dB Pout = 0.6 x 10^(55/10) = 0.6 x 31622.8 = 190 kWThe output power is 190 kWeun mun kang100% (3)
- Prelim Cisco 2Document16 pagesPrelim Cisco 2eun mun kang100% (1)
- Finals Cisco 2Document33 pagesFinals Cisco 2eun mun kangNo ratings yet
- Comp 6103 Erc2 Final Laboratory RequirementsDocument1 pageComp 6103 Erc2 Final Laboratory Requirementseun mun kangNo ratings yet
- Cisco-2 It6223Document23 pagesCisco-2 It6223eun mun kangNo ratings yet
- Prelim Cisco 2Document16 pagesPrelim Cisco 2eun mun kang100% (1)
- Midterm Cisco 2Document18 pagesMidterm Cisco 2eun mun kangNo ratings yet
- Education Trends in TechnologyDocument7 pagesEducation Trends in Technologyeun mun kangNo ratings yet
- Midterm Cisco 2Document18 pagesMidterm Cisco 2eun mun kangNo ratings yet
- Life and Works of Jose RizalDocument35 pagesLife and Works of Jose Rizaleun mun kangNo ratings yet
- Life and Works of Jose RizalDocument35 pagesLife and Works of Jose Rizaleun mun kangNo ratings yet
- Rizal Quiz 6 by ThuzDocument4 pagesRizal Quiz 6 by Thuzeun mun kangNo ratings yet
- Finals Cisco 2Document33 pagesFinals Cisco 2eun mun kangNo ratings yet
- GPS Guided Autonomous RoverDocument10 pagesGPS Guided Autonomous Rover1SABNo ratings yet
- VCC GND RXD TXD SET Arduino Pin 3 Arduino Pin 2: BuzzerDocument1 pageVCC GND RXD TXD SET Arduino Pin 3 Arduino Pin 2: Buzzerwww.arduino4u.comNo ratings yet
- A&R Course Project 55Document10 pagesA&R Course Project 55Bhukya Naveen kumarNo ratings yet
- Water Tank Indicator MicroprojectDocument18 pagesWater Tank Indicator MicroprojectAadil • Shaikh100% (1)
- TA0135 4WD Robot Kit Instruction ManualDocument98 pagesTA0135 4WD Robot Kit Instruction ManualghenriquezNo ratings yet
- Real-Time Object Tracking System SIM808 Arduino (Github - Com Sarehsoltani) - BSc-Thesis ReportDocument39 pagesReal-Time Object Tracking System SIM808 Arduino (Github - Com Sarehsoltani) - BSc-Thesis ReportAntoiineNo ratings yet
- Geriatric-Medi BotDocument38 pagesGeriatric-Medi Bot4402 Ajesh RNo ratings yet
- Shopping Mall IeeeDocument6 pagesShopping Mall IeeeRajuNo ratings yet
- Arduino - MotorKnobDocument4 pagesArduino - MotorKnobJavier Fernando Vásquez GómezNo ratings yet
- Arduino Based Automatic Plant Irrigation System With Message AlertDocument26 pagesArduino Based Automatic Plant Irrigation System With Message AlertBelayneh Tadesse100% (4)
- Spinning - Rotating LED Display Using Arduino POVDocument23 pagesSpinning - Rotating LED Display Using Arduino POVkannan kNo ratings yet
- Design and Construction of An Arduino Microcontroller-Based EGG IncubatorDocument10 pagesDesign and Construction of An Arduino Microcontroller-Based EGG Incubatortoha putraNo ratings yet
- Pi-Bot V2.0 User ManualDocument110 pagesPi-Bot V2.0 User ManualMarcelo Carvalho100% (1)
- Arduino - Simulink - Course Class 8 Extra Material (Arduino Target)Document7 pagesArduino - Simulink - Course Class 8 Extra Material (Arduino Target)Adarleen Arevalo ValleNo ratings yet
- Automated Medicine Dispenser in Pharmacy: August 2019Document7 pagesAutomated Medicine Dispenser in Pharmacy: August 2019marjoriegloduve02No ratings yet
- Control water pump with Arduino and SMSDocument6 pagesControl water pump with Arduino and SMSlena cpaNo ratings yet
- Mp3 Player Using DFPlayer - Full Design DetailsDocument41 pagesMp3 Player Using DFPlayer - Full Design DetailsAnda Suganda100% (1)
- C520BDocument4 pagesC520BSahrulRashid0% (1)
- Endoilluminator Light Source For Multiple SurgeriesDocument3 pagesEndoilluminator Light Source For Multiple SurgeriesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Interfacing MMDVM to CDM 1250 UHF Radios Home-Brew Repeater Project GuideDocument22 pagesInterfacing MMDVM to CDM 1250 UHF Radios Home-Brew Repeater Project Guidep25digital2No ratings yet
- Design and Fabrication of 3-Axis CNC Milling Machine: AbstractDocument5 pagesDesign and Fabrication of 3-Axis CNC Milling Machine: AbstractMohammedsaleemNo ratings yet
- Arduino Nano Propeller LED Analog Clock SynDocument11 pagesArduino Nano Propeller LED Analog Clock Synchandan chandu75% (4)
- Use Android Phone Sensors with ArduinoDocument19 pagesUse Android Phone Sensors with Arduinomarius_danila8736No ratings yet
- Kathmandu University Students Design Line-Following RobotDocument10 pagesKathmandu University Students Design Line-Following RobotishworNo ratings yet
- How To Start Learning Embedded Systems - A Complete RoadmapDocument29 pagesHow To Start Learning Embedded Systems - A Complete RoadmapSyed Zauq ul ArifeenNo ratings yet
- Power Plug Meter: 3 BEKE (S1) Pic: Dr. Wahidah Binti Abdul HalimDocument14 pagesPower Plug Meter: 3 BEKE (S1) Pic: Dr. Wahidah Binti Abdul HalimayasumireNo ratings yet
- Electronic Circuits and Diagram-Electronics Projects and DesignDocument8 pagesElectronic Circuits and Diagram-Electronics Projects and DesignEric MelendezNo ratings yet
- Revolutionizing Traffic ControlDocument13 pagesRevolutionizing Traffic ControlEZERRNo ratings yet
- 31Document9 pages31ALNATRON GROUPSNo ratings yet
- Electronics For ArtistsDocument35 pagesElectronics For Artistsdb5fx100% (1)