You might also like
- Design and Implementation of Autonomous Line Follower Robot Using MicrocontrollerDocument4 pagesDesign and Implementation of Autonomous Line Follower Robot Using MicrocontrollerVASANTHKUMAR M SNo ratings yet
- Final ProposalDocument13 pagesFinal ProposalAzizNo ratings yet
- Automatic Vacuum Cleaner: Ministry of Higher Education Herat University Engineering Faculty Mechatronics DepartmentDocument13 pagesAutomatic Vacuum Cleaner: Ministry of Higher Education Herat University Engineering Faculty Mechatronics DepartmentAziz KhaliliNo ratings yet
- Smart and Intelligent Line Follower Robot Detects ObstaclesDocument6 pagesSmart and Intelligent Line Follower Robot Detects ObstaclesIndian MusicNo ratings yet
- Multifuntioning RobotDocument139 pagesMultifuntioning RobotshamstouhidNo ratings yet
- Proposal Line FollowerDocument18 pagesProposal Line FollowerMelkamu SimenehNo ratings yet
- Water Level Indicator and Controller Project ReportDocument14 pagesWater Level Indicator and Controller Project ReportDivyansh MathurNo ratings yet
- The Line Follower - And-Pick and Place Robot.: International Research Journal of Engineering and Technology (IRJET)Document6 pagesThe Line Follower - And-Pick and Place Robot.: International Research Journal of Engineering and Technology (IRJET)VASANTHKUMAR M SNo ratings yet
- Project Synopsis CVDocument3 pagesProject Synopsis CVKarthik N SNo ratings yet
- A Report of Mini Project Line Following Robot Car Using ArdinoDocument10 pagesA Report of Mini Project Line Following Robot Car Using Ardinorao asad0% (1)
- Obstacle Avoidance Robotic VehicleDocument10 pagesObstacle Avoidance Robotic VehicleSpiwe MavisNo ratings yet
- Kakatiya Tech's Arduino Human Following RobotDocument12 pagesKakatiya Tech's Arduino Human Following RobotsreejaNo ratings yet
- Line Follower Robot Mini ProjectDocument39 pagesLine Follower Robot Mini ProjectPrem KumarNo ratings yet
- Obstacle Avoidance Robot Using ArduinoDocument5 pagesObstacle Avoidance Robot Using ArduinoRichard Kaven SerquinaNo ratings yet
- 21.line Following RobotDocument78 pages21.line Following RobotsathishNo ratings yet
- Final Seminar ReportDocument18 pagesFinal Seminar Reportaditya kambleNo ratings yet
- Linefollower Robot Using ArduinoDocument7 pagesLinefollower Robot Using ArduinoShin Han NxtNo ratings yet
- Obstacle Avoiding RobotDocument24 pagesObstacle Avoiding Robotmkafle101No ratings yet
- Report IoT PDFDocument3 pagesReport IoT PDFArshNo ratings yet
- Line Following Robot Project ReportDocument9 pagesLine Following Robot Project ReportBilal ShafiNo ratings yet
- Line Follower Robot ProjectDocument8 pagesLine Follower Robot ProjectPuneeth ShettigarNo ratings yet
- Project Report On Robotic ArmDocument17 pagesProject Report On Robotic ArmGina SreeNo ratings yet
- Obstacle avoidance robot using ArduinoDocument7 pagesObstacle avoidance robot using ArduinoPramod TNo ratings yet
- Human Detection Robot (ROHSAR) : September 2016Document17 pagesHuman Detection Robot (ROHSAR) : September 2016Vinay BhogalNo ratings yet
- Arduino Based Obstacle Avoiding Robot: Electrical Engineering Department 6 Semester, Batch 2017, Section (A)Document11 pagesArduino Based Obstacle Avoiding Robot: Electrical Engineering Department 6 Semester, Batch 2017, Section (A)Spring SuperbNo ratings yet
- Warehouse Management BOT Using ArduinoDocument6 pagesWarehouse Management BOT Using ArduinoIJRASETPublicationsNo ratings yet
- Line Follower RobotDocument16 pagesLine Follower RobotRohit sharmaNo ratings yet
- Human Following RobotDocument19 pagesHuman Following Robot54 YOGESHWARAN RNo ratings yet
- Drive Less VechileDocument6 pagesDrive Less VechileParveen KumarNo ratings yet
- Robotics - 2Document65 pagesRobotics - 2chandansonics06No ratings yet
- 8051 Microcontroller Based Edge Avoiding RobotDocument14 pages8051 Microcontroller Based Edge Avoiding RobotJuthik BVNo ratings yet
- Line FollowerDocument15 pagesLine FollowerShivam VaishnavNo ratings yet
- Project Report: Btech-Mechanical EngineeringDocument17 pagesProject Report: Btech-Mechanical EngineeringNaveen SNo ratings yet
- On Minor ProjectDocument21 pagesOn Minor ProjectMANISHA S67% (3)
- Robot Mini ProjectDocument17 pagesRobot Mini Projectفهد العتيبيNo ratings yet
- Line Following RobotDocument19 pagesLine Following RobotHarini100% (1)
- Do LineDocument48 pagesDo LineThai Lam Cuong QuocNo ratings yet
- Automatic Floor Cleaning Robot Using EncoderDocument4 pagesAutomatic Floor Cleaning Robot Using EncoderEditor IJTSRDNo ratings yet
- E-2 Report (Yasir Abbas)Document9 pagesE-2 Report (Yasir Abbas)Mirza Riyasat AliNo ratings yet
- Obstacle Avoidance Robot Using Arduino IJERTCONV6IS13197Document4 pagesObstacle Avoidance Robot Using Arduino IJERTCONV6IS13197Xaf FarNo ratings yet
- Microcontroller Based Line Following Robot: 25 MARCH, 2018 Balerobe, EthiopiaDocument10 pagesMicrocontroller Based Line Following Robot: 25 MARCH, 2018 Balerobe, EthiopiaBIniamNo ratings yet
- Obstacle Avoiding CarDocument15 pagesObstacle Avoiding Car20ec074sayaNo ratings yet
- Line Follower Robot Final PPT 1Document16 pagesLine Follower Robot Final PPT 1harshil mangeNo ratings yet
- AUTOMATIC and MANUAL VACUUM CLEANING ROBDocument3 pagesAUTOMATIC and MANUAL VACUUM CLEANING ROBSirajus Salekin [Id:37]No ratings yet
- Chapter FiveDocument4 pagesChapter FivebezawitNo ratings yet
- Research Paper-1 (1)Document5 pagesResearch Paper-1 (1)aryan7321dNo ratings yet
- XXXXXXXXX (Title) : Submitted by Chaitanya Ranade 64Document12 pagesXXXXXXXXX (Title) : Submitted by Chaitanya Ranade 64HRITHIK POOJARYNo ratings yet
- 05556780Document6 pages05556780Hitesh BahetiNo ratings yet
- Obstacle Avoidance Robot Using ArduinoDocument2 pagesObstacle Avoidance Robot Using ArduinoDeepanshi RuhelaNo ratings yet
- Line Controlled RobotDocument27 pagesLine Controlled RobotchaitanyaNo ratings yet
- Report Group9Document27 pagesReport Group9Trần Nam sơnNo ratings yet
- Final Copy of Line Follower RobotDocument10 pagesFinal Copy of Line Follower RobotPhạm Tành ĐồngNo ratings yet
- Android Phone Controlled Bluetooth Robot: April 2016Document12 pagesAndroid Phone Controlled Bluetooth Robot: April 2016Fakhr Al-TimimiNo ratings yet
- Autonomous Obstacle Avoiding and Path Following RoverDocument12 pagesAutonomous Obstacle Avoiding and Path Following RoverIndian MusicNo ratings yet
- Obstacle Avoidance Robot ReportDocument28 pagesObstacle Avoidance Robot ReportFadzrul FaizNo ratings yet
- Research Register 554 4016 1612220739 1Document28 pagesResearch Register 554 4016 1612220739 1Fayçal BEN HMIDANo ratings yet
- B0610011017 PDFDocument8 pagesB0610011017 PDFEdiNo ratings yet
- Autonomous Trash Collecting Robot with IoTDocument19 pagesAutonomous Trash Collecting Robot with IoTimran kadriNo ratings yet
- Line Follower and Obstacle Avoidance Bot Using ArduinoDocument4 pagesLine Follower and Obstacle Avoidance Bot Using ArduinorahimNo ratings yet
- Practical, Made Easy Guide To Robotics & Automation [Revised Edition]From EverandPractical, Made Easy Guide To Robotics & Automation [Revised Edition]Rating: 1 out of 5 stars1/5 (1)
- L&T: Restructuring The Cement Business: Asian Case Research Journal June 2005Document34 pagesL&T: Restructuring The Cement Business: Asian Case Research Journal June 2005Ashu KhandelwalNo ratings yet
- Intership ReportDocument28 pagesIntership ReportIshan GuptaNo ratings yet
- Magazine Task 1Document1 pageMagazine Task 1Ishan GuptaNo ratings yet
- Magazine Task 1Document1 pageMagazine Task 1Ishan GuptaNo ratings yet
- RFID Payment For VIT CabsDocument6 pagesRFID Payment For VIT CabsIshan GuptaNo ratings yet
- CAT-2004 SolDocument6 pagesCAT-2004 SolAkshay BhimrajkaNo ratings yet
- Solar Wiring EbookDocument11 pagesSolar Wiring EbookLucian LazarutNo ratings yet
- Can Crusher SummaryDocument14 pagesCan Crusher SummaryOsama Abdelaleem100% (1)
- Shakti Engineering Works Have Become One of The Recognized and Trusted Organizations Engaged in Manufacturing A Wide Range of Vibro Screen MachineDocument10 pagesShakti Engineering Works Have Become One of The Recognized and Trusted Organizations Engaged in Manufacturing A Wide Range of Vibro Screen MachineAnonymous gzC9adeNo ratings yet
- IDBI Sample Test - 1Document5 pagesIDBI Sample Test - 1LalBabuNo ratings yet
- Assignment-1 EE-2101: Name:-Hage Nobin Roll no.-B/19/EE/036 Date of Submission-30/10/2020Document4 pagesAssignment-1 EE-2101: Name:-Hage Nobin Roll no.-B/19/EE/036 Date of Submission-30/10/2020x caliber10No ratings yet
- APGENCO 2011 Sub-Engineer Question Paper (Memory Based) - Indian ShoutDocument8 pagesAPGENCO 2011 Sub-Engineer Question Paper (Memory Based) - Indian ShoutumamaheshwarraoNo ratings yet
- TWS Wheels ENGDocument12 pagesTWS Wheels ENGRaul MorenoNo ratings yet
- BenQ G610HDA - V1Document47 pagesBenQ G610HDA - V1adriantxeNo ratings yet
- Bangalore ArchitectsDocument11 pagesBangalore Architectsrmag1020100% (1)
- Cognos DispatcherDocument17 pagesCognos Dispatcherabdul87sNo ratings yet
- Earth Ground Resistance Measurement GuideDocument5 pagesEarth Ground Resistance Measurement GuideRoopesh Kumar TirupathiNo ratings yet
- POWER JACK Report 35 PagesDocument35 pagesPOWER JACK Report 35 Pagesankush belkarNo ratings yet
- Materials Required Per Unit WorkDocument18 pagesMaterials Required Per Unit WorkLiban Halake100% (2)
- (WRC-SouthAfrica-2001-R. McKenzei) PRESMAC User GuideDocument80 pages(WRC-SouthAfrica-2001-R. McKenzei) PRESMAC User GuideStephenson Xavier Molina ArceNo ratings yet
- Burj Al Baher Curtain Wall SpecsDocument73 pagesBurj Al Baher Curtain Wall SpecsmcbluedNo ratings yet
- MB09807UDocument27 pagesMB09807URavishka SilvaNo ratings yet
- ChappieDocument2 pagesChappieArlyn AlonzoNo ratings yet
- RB4Document5 pagesRB4Brett Harper100% (2)
- 2014 Summer Model Answer PaperDocument20 pages2014 Summer Model Answer Papercivil gpkpNo ratings yet
- Instruction Manual of Gravity Destoner: Zhengzhou Chinatown Grain Machinery Co., LTDDocument9 pagesInstruction Manual of Gravity Destoner: Zhengzhou Chinatown Grain Machinery Co., LTD(Doc - Bto) Renato Alejandro Andara EscalonaNo ratings yet
- 2015 Ordinance BTech DtuDocument32 pages2015 Ordinance BTech DtuGaganpreetSinghNo ratings yet
- Managing SAP BW Projects Part-2Document54 pagesManaging SAP BW Projects Part-2tupacshakrNo ratings yet
- Purlins Cold Formed SectionDocument5 pagesPurlins Cold Formed SectionHarjasa AdhiNo ratings yet
- Toro WheelHorse 260 Series Service ManualDocument112 pagesToro WheelHorse 260 Series Service ManualKevins Small Engine and Tractor Service77% (22)
- Jotafloor Easy Painting Guide For Concrete Floors Tcm29 5703Document8 pagesJotafloor Easy Painting Guide For Concrete Floors Tcm29 5703Riski FebriantoNo ratings yet
- 2012 - Long Distance Pipe Jacking - ExperienceDocument40 pages2012 - Long Distance Pipe Jacking - ExperienceCheng KimHuaNo ratings yet
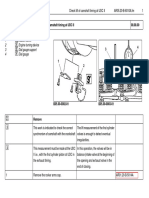
- AR05.20-B-6010A.fm Check Lift of Camshaft Timing at UDC II 08.08.00Document4 pagesAR05.20-B-6010A.fm Check Lift of Camshaft Timing at UDC II 08.08.00LUKASNo ratings yet
- SMA and Sofar Inverter PricelistDocument3 pagesSMA and Sofar Inverter PricelistYuvaraj JeyachandranNo ratings yet
- Samsung Single DVD-Player Intro Standard & Karaoke ModelsDocument60 pagesSamsung Single DVD-Player Intro Standard & Karaoke ModelsparascoliNo ratings yet
- Determination of Optimum Reheat Pressures For Single and Double Reheat Irreversible Rankine CycleDocument6 pagesDetermination of Optimum Reheat Pressures For Single and Double Reheat Irreversible Rankine CycleEdrielleNo ratings yet



























































![Practical, Made Easy Guide To Robotics & Automation [Revised Edition]](https://imgv2-2-f.scribdassets.com/img/word_document/253466853/149x198/4281882d40/1709916831?v=1)