You might also like
- INTRODUCTION TO BALANCINGDocument40 pagesINTRODUCTION TO BALANCINGdax100% (2)
- Engineering Encyclopedia: Balancing of Rigid and Flexible RotorsDocument10 pagesEngineering Encyclopedia: Balancing of Rigid and Flexible RotorsAfzaalUmair100% (1)
- Basics of Turbomachinery BalanceDocument14 pagesBasics of Turbomachinery BalanceSuthan RNo ratings yet
- Some Practical Aspects of Balancing An Ultracentrifuge RotorDocument10 pagesSome Practical Aspects of Balancing An Ultracentrifuge RotorGustavo da SilvaNo ratings yet
- The Lecture Contains:: Lecture 5: Balancing of Rigid RotorsDocument5 pagesThe Lecture Contains:: Lecture 5: Balancing of Rigid RotorsAshish SinghNo ratings yet
- BALANCING ROTATING EQUIPMENTDocument31 pagesBALANCING ROTATING EQUIPMENTJOSEACOSTANo ratings yet
- Rotor balancing simulator projectDocument38 pagesRotor balancing simulator projectMahmoud SamirNo ratings yet
- Plane Balancing of Rotors PresentationDocument29 pagesPlane Balancing of Rotors PresentationOleg1142No ratings yet
- Static and Dynamic Balancing of Rigid RotorsDocument20 pagesStatic and Dynamic Balancing of Rigid RotorsTeng Soon Chye100% (1)
- Rotordynamics and Balancing RevisitedDocument40 pagesRotordynamics and Balancing RevisitedMohd Khairi Asyraf Ab HamidNo ratings yet
- Review of Rotor Balancing MethodsDocument16 pagesReview of Rotor Balancing MethodsFallo SusiloNo ratings yet
- Rotor Balancing: 28.1 General ConsiderationsDocument2 pagesRotor Balancing: 28.1 General ConsiderationsYASSERNo ratings yet
- Dynamic Balancing ExpDocument10 pagesDynamic Balancing ExpSand Man Out100% (1)
- Journal Bearing VibrationDocument6 pagesJournal Bearing VibrationEmanuel Bruno Santos100% (1)
- Alternative methods for balancing fans and rotorsDocument3 pagesAlternative methods for balancing fans and rotorsAgustin A.No ratings yet
- Design and Development of Dynamic Balancing MachineDocument9 pagesDesign and Development of Dynamic Balancing MachineSibasish SahuNo ratings yet
- Dynamic Balancing of Centrifugal Pump ImpellerDocument5 pagesDynamic Balancing of Centrifugal Pump ImpellerChoochart Thongnark100% (1)
- Goal of ProjectDocument19 pagesGoal of ProjectMahmoud SamirNo ratings yet
- Abstract ISO 1940-1 - 2003Document4 pagesAbstract ISO 1940-1 - 2003PPMNo ratings yet
- Improved Rotor Track and Balance Performance Using An Expert SystemDocument8 pagesImproved Rotor Track and Balance Performance Using An Expert SystemEric BechhoeferNo ratings yet
- Conical Rotor Balancing TechniqueDocument8 pagesConical Rotor Balancing TechniqueRazhmi ranjanNo ratings yet
- Diagnosis of Common Vibration Problems: Prof. Dr. Fawkia RamadanDocument13 pagesDiagnosis of Common Vibration Problems: Prof. Dr. Fawkia Ramadanفرح تامر100% (1)
- 2009-Schweizer-Oil whirl,whip occ in Rot Systs with full floating ring bearingsDocument24 pages2009-Schweizer-Oil whirl,whip occ in Rot Systs with full floating ring bearingsAlex CooperNo ratings yet
- Rotary Lobe Blower Vibration GuideDocument6 pagesRotary Lobe Blower Vibration GuideJoako TorresNo ratings yet
- 1 s2.0 S0888327016302989 Main PDFDocument15 pages1 s2.0 S0888327016302989 Main PDFDávid RúraNo ratings yet
- Rotor Balancing Simulator: Fourth Year Graduation ProjectDocument21 pagesRotor Balancing Simulator: Fourth Year Graduation ProjectMahmoud SamirNo ratings yet
- Balancing TolerancesDocument7 pagesBalancing TolerancesAnonymous 7aN0oYUm7v100% (2)
- University of Nottingham School of Mechanical, Materials, Manufacturing Engineering and Management Advanced Dynamics of Machines (H3 C ADM)Document3 pagesUniversity of Nottingham School of Mechanical, Materials, Manufacturing Engineering and Management Advanced Dynamics of Machines (H3 C ADM)Jessica SandersNo ratings yet
- Adv. Mechanical VibrationDocument15 pagesAdv. Mechanical Vibrationashwini yewaleNo ratings yet
- 哈尔滨汽轮机厂有限责任公司指导性技术文件 Harbin Turbine Company Limited Guiding Technical DocumentDocument18 pages哈尔滨汽轮机厂有限责任公司指导性技术文件 Harbin Turbine Company Limited Guiding Technical DocumentecsuperalNo ratings yet
- Test Rig Design and Testing Performance of Linear Ball BearingDocument6 pagesTest Rig Design and Testing Performance of Linear Ball BearingthisisjineshNo ratings yet
- Rotordynamics of Turbomachinery: Critical Speeds & Vibration AnalysisDocument3 pagesRotordynamics of Turbomachinery: Critical Speeds & Vibration AnalysisJohn ByersNo ratings yet
- 2013-Eling_Dyn of Rotors on Hydrodynamic Bearings-COMSOL ConfDocument7 pages2013-Eling_Dyn of Rotors on Hydrodynamic Bearings-COMSOL ConfAlex CooperNo ratings yet
- Advanced Field BalancingDocument33 pagesAdvanced Field BalancingAmir Mahmoud Mahdavi Abhari100% (1)
- Troubleshooting Turbomachinery Using Startup and Coastdown Vibration DataDocument14 pagesTroubleshooting Turbomachinery Using Startup and Coastdown Vibration DataAhtsham AhmadNo ratings yet
- Balancing of Rotating MachineryDocument38 pagesBalancing of Rotating MachineryThomas AbrahamNo ratings yet
- Suri Rotor BalancingDocument55 pagesSuri Rotor BalancingDhaval BhayaniNo ratings yet
- 1) What Is Rotor?: Module-13: Balancing of MachinesDocument2 pages1) What Is Rotor?: Module-13: Balancing of MachinesAnjali SharmaNo ratings yet
- LLoyds Register Rules and RegulationsDocument20 pagesLLoyds Register Rules and RegulationsRPDeshNo ratings yet
- Rotor PDFDocument1 pageRotor PDFPavan KishoreNo ratings yet
- Journal Bearing VibrationDocument10 pagesJournal Bearing Vibrationalex roNo ratings yet
- Guia de La Termografia Infrarroja Fenercom 2011Document38 pagesGuia de La Termografia Infrarroja Fenercom 2011fraicheNo ratings yet
- Field Balancing Large Rotating MachineryDocument26 pagesField Balancing Large Rotating MachineryAravind ShankarNo ratings yet
- TurbineDocument8 pagesTurbineJay Patel100% (1)
- Flexible Rotor Balancing: N. F. Rieger (Ed.), Rotordynamics 2 © Springer-Verlag Wien 1988Document2 pagesFlexible Rotor Balancing: N. F. Rieger (Ed.), Rotordynamics 2 © Springer-Verlag Wien 1988YASSERNo ratings yet
- Sesi-14 Analisis Getaran Electric Motor & TugasDocument10 pagesSesi-14 Analisis Getaran Electric Motor & Tugasyusup delopNo ratings yet
- Inspection DepartmentDocument6 pagesInspection DepartmentNawafo AlsnaniNo ratings yet
- A New Class of Rotary Piston Machine Suitable For Compressors, Pumps and Internal Combustion EnginesDocument18 pagesA New Class of Rotary Piston Machine Suitable For Compressors, Pumps and Internal Combustion Enginesconlib100% (1)
- Libro 2 PDFDocument18 pagesLibro 2 PDFCésar MaravíNo ratings yet
- VIBGUARD XPLow-frequency Vibrations - Online Condition Monitoring - WirelessDocument10 pagesVIBGUARD XPLow-frequency Vibrations - Online Condition Monitoring - WirelessLake HouseNo ratings yet
- Article Balancing of Rotor BladesDocument5 pagesArticle Balancing of Rotor BladesAhmedFaissalNo ratings yet
- The Design of Modern Microwave Oscillators for Wireless Applications: Theory and OptimizationFrom EverandThe Design of Modern Microwave Oscillators for Wireless Applications: Theory and OptimizationNo ratings yet
- Electrical (Generator and Electrical Plant): Modern Power Station PracticeFrom EverandElectrical (Generator and Electrical Plant): Modern Power Station PracticeRating: 4 out of 5 stars4/5 (9)
- Modern Practice in Servo Design: International Series of Monographs in Electrical EngineeringFrom EverandModern Practice in Servo Design: International Series of Monographs in Electrical EngineeringRating: 5 out of 5 stars5/5 (1)
- Rotor Balancing: 28.1 General ConsiderationsDocument2 pagesRotor Balancing: 28.1 General ConsiderationsYASSERNo ratings yet
- MydoccccDocument1 pageMydoccccYASSERNo ratings yet
- MydoccccDocument1 pageMydoccccYASSERNo ratings yet
- MydoccccDocument1 pageMydoccccYASSERNo ratings yet
- Rotor Balancing in TurbochargersDocument2 pagesRotor Balancing in TurbochargersYASSERNo ratings yet
- Balancing PDFDocument15 pagesBalancing PDFYASSERNo ratings yet
- Flexible Rotor Balancing: N. F. Rieger (Ed.), Rotordynamics 2 © Springer-Verlag Wien 1988Document2 pagesFlexible Rotor Balancing: N. F. Rieger (Ed.), Rotordynamics 2 © Springer-Verlag Wien 1988YASSERNo ratings yet
- Letters To The Editor: Optimal One-Plane Active Balancing of A Rigid Rotor During AccelerationDocument10 pagesLetters To The Editor: Optimal One-Plane Active Balancing of A Rigid Rotor During AccelerationYASSERNo ratings yet
- VIpres PDFDocument34 pagesVIpres PDFruselkisNo ratings yet
- Balancing Machines For PistonDocument4 pagesBalancing Machines For PistonDaniel AriitonangNo ratings yet
- Rotor Balancing in TurbochargersDocument2 pagesRotor Balancing in TurbochargersYASSERNo ratings yet
- A 1016050732065 PDFDocument10 pagesA 1016050732065 PDFYASSERNo ratings yet
- Journal of Sound and Vibration (1997) 208 (4), 656-663: Optimal Two-Plane Balance of Rigid Rotors L. J. EDocument8 pagesJournal of Sound and Vibration (1997) 208 (4), 656-663: Optimal Two-Plane Balance of Rigid Rotors L. J. EYASSERNo ratings yet
- Dynamic Behaviour of Rotating Machinery: 4.1 Rotors and StructuresDocument2 pagesDynamic Behaviour of Rotating Machinery: 4.1 Rotors and StructuresYASSERNo ratings yet
- VIpres PDFDocument34 pagesVIpres PDFruselkisNo ratings yet
- A 1016050732065 PDFDocument10 pagesA 1016050732065 PDFYASSERNo ratings yet
- IM January pg11Document1 pageIM January pg11YASSERNo ratings yet
- Letters To The Editor: Optimal One-Plane Active Balancing of A Rigid Rotor During AccelerationDocument10 pagesLetters To The Editor: Optimal One-Plane Active Balancing of A Rigid Rotor During AccelerationYASSERNo ratings yet
- Rotor Balancing: 28.1 General ConsiderationsDocument2 pagesRotor Balancing: 28.1 General ConsiderationsYASSERNo ratings yet
- IM January pg11Document1 pageIM January pg11YASSERNo ratings yet
- Vibration Analysis of a Vertical Axis Wind Turbine BladeDocument2 pagesVibration Analysis of a Vertical Axis Wind Turbine BladeMansanth BoseNo ratings yet
- PPM Article WebDocument4 pagesPPM Article WebOsama MohammedNo ratings yet
- Revision 2 Pages Grammar Drills 106078Document3 pagesRevision 2 Pages Grammar Drills 106078Ligia Dragomir100% (1)
- Determine PH by PH Indicator and Universal IndicatorDocument3 pagesDetermine PH by PH Indicator and Universal IndicatorhaleelNo ratings yet
- Guide 111: International Electrotechnical CommissionDocument7 pagesGuide 111: International Electrotechnical CommissionSayyid JifriNo ratings yet
- CHAPTER-9, Respiration in Organisms.Document3 pagesCHAPTER-9, Respiration in Organisms.HarshitAhelani2379ScribdNo ratings yet
- We Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsDocument21 pagesWe Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For Scientistsnonzero15No ratings yet
- Journal of The Folk Song Society No.8Document82 pagesJournal of The Folk Song Society No.8jackmcfrenzieNo ratings yet
- A Study On Renewable Energy Resources in IndiaDocument39 pagesA Study On Renewable Energy Resources in IndiaDevendra SharmaNo ratings yet
- 88 Dean StreetDocument36 pages88 Dean StreetPatrick BatyNo ratings yet
- MODULE-2-VETTECH325 (2)Document31 pagesMODULE-2-VETTECH325 (2)cejproiloNo ratings yet
- Solvent Extraction: Please Submit Question 4 For MarkingDocument3 pagesSolvent Extraction: Please Submit Question 4 For MarkingThembi Matebula100% (1)
- Rational Use of AntibioticsDocument35 pagesRational Use of AntibioticsRahul SharmaNo ratings yet
- Solar Collectors Final WordDocument14 pagesSolar Collectors Final WordVaibhav Vithoba NaikNo ratings yet
- Entrepreneurship Macro Environment ForcesDocument26 pagesEntrepreneurship Macro Environment ForcesSivaNo ratings yet
- BMK PDFDocument8 pagesBMK PDFHuỳnh Minh SángNo ratings yet
- Bathymetry and Its Applications PDFDocument158 pagesBathymetry and Its Applications PDFArseni MaximNo ratings yet
- API Calcs Rev1 (Version 2)Document112 pagesAPI Calcs Rev1 (Version 2)Jake Sparrow100% (1)
- Chapter 3Document58 pagesChapter 3hasanNo ratings yet
- Rental Range Powered by YANMAR Diesel GeneratorDocument6 pagesRental Range Powered by YANMAR Diesel GeneratorJonathan CastilloNo ratings yet
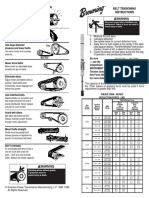
- Browning Belt Tension GaugeDocument2 pagesBrowning Belt Tension GaugeJasperken2xNo ratings yet
- Guía de Instalación y Programación: Sistema de Seguridad de 32 ZonasDocument68 pagesGuía de Instalación y Programación: Sistema de Seguridad de 32 ZonasfernanfivNo ratings yet
- Final Nasir GlassDocument57 pagesFinal Nasir GlassShuvo Taufiq Ahmed100% (2)
- K2N Final Internship ReportDocument55 pagesK2N Final Internship ReportAceZeta0% (1)
- Ic M802 UDocument79 pagesIc M802 Uharis_fikriNo ratings yet
- Anatomy of A Plated HoleDocument5 pagesAnatomy of A Plated Holepbs0707No ratings yet
- Kant On Religion and ScienceDocument21 pagesKant On Religion and ScienceEduardo CharpenelNo ratings yet
- White Lies - Core RulebookDocument136 pagesWhite Lies - Core RulebookThiago AlmeidaNo ratings yet
- 21st Century Science - Summer 2011 - The Universe Is CreativeDocument84 pages21st Century Science - Summer 2011 - The Universe Is CreativeMatthew EhretNo ratings yet
- Negative Compressibility and PVT Extrapolation WarningsDocument17 pagesNegative Compressibility and PVT Extrapolation WarningsMarcelo SaezNo ratings yet
- Fetal and Placental Development - FETAL Sac, Umbilical Cord .Abnormalities of PlacentaDocument150 pagesFetal and Placental Development - FETAL Sac, Umbilical Cord .Abnormalities of PlacentaKripa SusanNo ratings yet
- Column FootingDocument57 pagesColumn Footingnuwan01100% (7)