You might also like
- Continuous and Discrete Time Signals and Systems (Mandal & Asif) Solutions - Chap02Document36 pagesContinuous and Discrete Time Signals and Systems (Mandal & Asif) Solutions - Chap02Lyubomir Hristov91% (11)
- Signals & Systems B38SA 2018: Chapter 2 Assignment Question 1 - Theory - 10 MarksDocument6 pagesSignals & Systems B38SA 2018: Chapter 2 Assignment Question 1 - Theory - 10 MarksBokai ZhouNo ratings yet
- Demystifying Interventional Radiology A Guide For Medical StudentsDocument195 pagesDemystifying Interventional Radiology A Guide For Medical StudentsMo Haroon100% (1)
- Signals & Systems (Solved Problems)Document7 pagesSignals & Systems (Solved Problems)Lohith CoreelNo ratings yet
- Mathematical Formulas for Economics and Business: A Simple IntroductionFrom EverandMathematical Formulas for Economics and Business: A Simple IntroductionRating: 4 out of 5 stars4/5 (4)
- Test 2: Section 1Document5 pagesTest 2: Section 1Wall HarryNo ratings yet
- Signals and Systems 1Document30 pagesSignals and Systems 1Rakesh Inani100% (1)
- Signals and Systems QuestionsDocument16 pagesSignals and Systems QuestionsVishal KumarNo ratings yet
- Signal & Systems - EE 221 - A-1Document6 pagesSignal & Systems - EE 221 - A-1Piyush OjhaNo ratings yet
- EIA Case Study of Highway Project WideningDocument10 pagesEIA Case Study of Highway Project WideningSRUTHI FRANCIS M.Tech Environmental Engineering 2020-2022No ratings yet
- Problem sheet–2 solutionsDocument3 pagesProblem sheet–2 solutionsNitish Kumar YadavNo ratings yet
- COSC 3451: Signals and Systems: Yt XT YtDocument14 pagesCOSC 3451: Signals and Systems: Yt XT YtsanjuNo ratings yet
- Assignment For Signal AnalysisDocument2 pagesAssignment For Signal AnalysisAhmed EwadaNo ratings yet
- 2019 Answers PDFDocument56 pages2019 Answers PDFNitya Pooja ReddyNo ratings yet
- Midterm Exam: Signal and System-100 Minutes Code 0010Document16 pagesMidterm Exam: Signal and System-100 Minutes Code 0010HongThinh NguyenNo ratings yet
- Sheet 2Document1 pageSheet 2ahmedmohamedn92No ratings yet
- Answers To Practice Questions For Module 2 - PDFDocument7 pagesAnswers To Practice Questions For Module 2 - PDFVarun ShaandheshNo ratings yet
- Transmission of A Signals Through Linear SystemsDocument12 pagesTransmission of A Signals Through Linear SystemsRamoni WafaNo ratings yet
- sns_2021_중간(온라인)Document2 pagessns_2021_중간(온라인)juyeons0204No ratings yet
- Chapter 2 AgaDocument22 pagesChapter 2 AgaNina AmeduNo ratings yet
- Lec 5Document69 pagesLec 5MitoNo ratings yet
- Solution To Exercise 1: Task 1Document5 pagesSolution To Exercise 1: Task 1Rehman SaleemNo ratings yet
- EECS3451 Chapter2Document24 pagesEECS3451 Chapter2nickbekiaris05No ratings yet
- Answer 2Document4 pagesAnswer 2廖宥丞No ratings yet
- Midterm Exam: Signal and System-100 Minutes Code 1Document16 pagesMidterm Exam: Signal and System-100 Minutes Code 1HongThinh NguyenNo ratings yet
- Tutorial 2 - Systems (Exercises)Document3 pagesTutorial 2 - Systems (Exercises)LEIDYDANNYTSNo ratings yet
- Dsic ch.1 Part 2Document5 pagesDsic ch.1 Part 2yusufshabanNo ratings yet
- Signals and Systems: Assignment-1 Monsoon 2020Document3 pagesSignals and Systems: Assignment-1 Monsoon 2020NishkarshNo ratings yet
- LTI Systems ConvolutionDocument30 pagesLTI Systems ConvolutionJoseph IbrahimNo ratings yet
- State Space AnalysisDocument89 pagesState Space Analysissongzheng chenNo ratings yet
- Signals and Systems HW1 Solution: Ming-Fu Tang March 14, 2014Document4 pagesSignals and Systems HW1 Solution: Ming-Fu Tang March 14, 2014Erin LinNo ratings yet
- EEE2035F: Signals and Systems I: Class Test 1Document5 pagesEEE2035F: Signals and Systems I: Class Test 1sanjayb1976gmailcomNo ratings yet
- Classifying Systems: Linear vs Non-Linear, Time Variant vs InvariantDocument4 pagesClassifying Systems: Linear vs Non-Linear, Time Variant vs InvariantGrootNo ratings yet
- ELEG 3124 Fourier Series and Transforms AssignmentsDocument16 pagesELEG 3124 Fourier Series and Transforms AssignmentsNguyễn Văn ĐứcNo ratings yet
- EEE2035F: Signals and Systems I: Class Test 1Document5 pagesEEE2035F: Signals and Systems I: Class Test 1sanjayb1976gmailcomNo ratings yet
- Exc 05 ConvolutionDocument3 pagesExc 05 ConvolutionNoe Adiel Ponce MorenoNo ratings yet
- Exercises For Signals and Systems (Part Two)Document4 pagesExercises For Signals and Systems (Part Two)Vincent YuchiNo ratings yet
- Serv - Chula.ac - TH Tarporn 487 HandOut DynamicCDocument38 pagesServ - Chula.ac - TH Tarporn 487 HandOut DynamicCAaditya RoyNo ratings yet
- Ae2235 Exercises Topic I.5Document5 pagesAe2235 Exercises Topic I.5che cheNo ratings yet
- Continuous & Discrete Systems GuideDocument22 pagesContinuous & Discrete Systems Guidevai amiNo ratings yet
- Exercises For Signals and Systems (Part Four)Document3 pagesExercises For Signals and Systems (Part Four)Vincent YuchiNo ratings yet
- Sas SeriesDocument8 pagesSas SerieskganesharunNo ratings yet
- Eee2035F Exam Signals and Systems I: University of Cape Town Department of Electrical EngineeringDocument3 pagesEee2035F Exam Signals and Systems I: University of Cape Town Department of Electrical EngineeringRubia IftikharNo ratings yet
- EC 402 SignalSystems NotesDocument45 pagesEC 402 SignalSystems NotesAnkit KapoorNo ratings yet
- Ae2235 Exercises Lecture 5Document5 pagesAe2235 Exercises Lecture 5Sarieta SarrahNo ratings yet
- Systems: Mathematical Model of A Physical ProcessDocument15 pagesSystems: Mathematical Model of A Physical ProcesszawirNo ratings yet
- Dyt Dyt Yt XT DT DT XT Teut Dyt Dyt DXT Yt XT DT DT DTDocument4 pagesDyt Dyt Yt XT DT DT XT Teut Dyt Dyt DXT Yt XT DT DT DTPoy LinNo ratings yet
- 4.SSA Video Lecture-1Document77 pages4.SSA Video Lecture-1AkNo ratings yet
- Problem Set No. 6: Sabancı University Faculty of Engineering and Natural Sciences Ens 211 - SignalsDocument6 pagesProblem Set No. 6: Sabancı University Faculty of Engineering and Natural Sciences Ens 211 - SignalsGarip KontNo ratings yet
- Bandpass Signals and Complex RepresentationDocument23 pagesBandpass Signals and Complex Representationamitranjan_77No ratings yet
- Assignment 3Document2 pagesAssignment 3EE21B1037 UdayNo ratings yet
- RespuestasDocument18 pagesRespuestasAndres HerediaNo ratings yet
- ELEC242-U Midterm I Exam - W16 - SolutionDocument5 pagesELEC242-U Midterm I Exam - W16 - SolutionGold RyanNo ratings yet
- Linear System Theory and Design: Taesam KangDocument42 pagesLinear System Theory and Design: Taesam KangFiriceNguyenNo ratings yet
- 2024_ELEC3004_Problem_Set_1Document4 pages2024_ELEC3004_Problem_Set_1songpengyuan123No ratings yet
- Assignment 1Document7 pagesAssignment 1Umesh KumarNo ratings yet
- Systems NotesDocument15 pagesSystems NotesSuhaimi SulaimanNo ratings yet
- Tables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesFrom EverandTables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesNo ratings yet
- Introductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)From EverandIntroductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)No ratings yet
- Tables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesFrom EverandTables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- Tutorial Chapter 5: MemoryDocument8 pagesTutorial Chapter 5: MemoryNur Amiera SyuhadhaNo ratings yet
- Bus Communication: Advantages and Disadvantages of Versatility and CostDocument5 pagesBus Communication: Advantages and Disadvantages of Versatility and CostNur Amiera SyuhadhaNo ratings yet
- hw11 SolnDocument4 pageshw11 SolnQuốc Toàn HàNo ratings yet
- VerilogDocument29 pagesVerilogUmamahesh MavuluriNo ratings yet
- Uploads-Question - Bank-Btech-5sem-It-Ca Faq PDFDocument6 pagesUploads-Question - Bank-Btech-5sem-It-Ca Faq PDFAfreensanaNo ratings yet
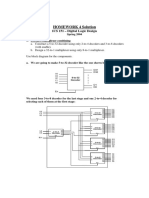
- HOMEWORK 4 Solution: ICS 151 - Digital Logic DesignDocument7 pagesHOMEWORK 4 Solution: ICS 151 - Digital Logic DesignNur Amiera SyuhadhaNo ratings yet
- Discrete Dependent Variable Models: C 5 S A: L, N L, & PDocument35 pagesDiscrete Dependent Variable Models: C 5 S A: L, N L, & PNur Amiera SyuhadhaNo ratings yet
- Infix, Postfix, and Prefix QuizDocument2 pagesInfix, Postfix, and Prefix QuizNur Amiera SyuhadhaNo ratings yet
- Chapter 2Document22 pagesChapter 2Anne DiasNo ratings yet
- Complex Numbers in Rectangular and Polar Form: Yi Geometrically, We Use The Rectangular Coordinate SystemDocument3 pagesComplex Numbers in Rectangular and Polar Form: Yi Geometrically, We Use The Rectangular Coordinate SystemNur Amiera SyuhadhaNo ratings yet
- (A) CU, ALU, Memory, Input, Output: Tutorial Chapter 1 and 2 (Answers) Q1Document5 pages(A) CU, ALU, Memory, Input, Output: Tutorial Chapter 1 and 2 (Answers) Q1Nur Amiera SyuhadhaNo ratings yet
- Applied ElectromagneticsDocument269 pagesApplied ElectromagneticsNur Amiera SyuhadhaNo ratings yet
- EE230x Hw#3 SolutionsDocument3 pagesEE230x Hw#3 SolutionsNur Amiera SyuhadhaNo ratings yet
- Ethics For First Year Engineers The Struggle To Build A Solid FoundationDocument9 pagesEthics For First Year Engineers The Struggle To Build A Solid FoundationNur Amiera SyuhadhaNo ratings yet
- Kool 1999Document6 pagesKool 1999Nur Amiera SyuhadhaNo ratings yet
- Digital Modulation TechniquesDocument22 pagesDigital Modulation TechniquesBiswajit MohantyNo ratings yet
- Implementation of 1D CNN Array on FPGADocument4 pagesImplementation of 1D CNN Array on FPGANur Amiera SyuhadhaNo ratings yet
- Design 2Document1 pageDesign 2Nur Amiera SyuhadhaNo ratings yet
- The Influence of Sensor-Based Intelligent Traffic Light Control ODocument95 pagesThe Influence of Sensor-Based Intelligent Traffic Light Control ONur Amiera SyuhadhaNo ratings yet
- Proportional - Integral-Derivative (Pid) Controller: by Mohd Hafiz Bin A. Jalil at ZainuddinDocument31 pagesProportional - Integral-Derivative (Pid) Controller: by Mohd Hafiz Bin A. Jalil at ZainuddinNur Amiera SyuhadhaNo ratings yet
- Guidelines of Occupational Safety and Health in Construction IndustryDocument74 pagesGuidelines of Occupational Safety and Health in Construction IndustryShaik MohamedNo ratings yet
- Simple RC Trigger Circuit ExplainedDocument1 pageSimple RC Trigger Circuit ExplainedNur Amiera SyuhadhaNo ratings yet
- Analasys of AmplifiersDocument29 pagesAnalasys of AmplifiersSreenivas KotakondaNo ratings yet
- Ba Etamatic Dlt2001 16 Aen 195Document156 pagesBa Etamatic Dlt2001 16 Aen 195Banu EdoNo ratings yet
- Automatic Optimization and Elastic ConstantsDocument15 pagesAutomatic Optimization and Elastic ConstantsFebriman ZendratoNo ratings yet
- Watching TV ads or internet ads? Pros, cons and preferencesDocument5 pagesWatching TV ads or internet ads? Pros, cons and preferencesJiaqi LiNo ratings yet
- Pic Optimax-I-Connect Brochure 2021 en 0Document13 pagesPic Optimax-I-Connect Brochure 2021 en 0Selim RezaNo ratings yet
- Goldspink & Kay, 2007 PDFDocument15 pagesGoldspink & Kay, 2007 PDFPantelis TsavalasNo ratings yet
- Armstrong ANFDocument2 pagesArmstrong ANFBramandito DamarNo ratings yet
- LEED AP ND Candidate Handbook - SFLBDocument32 pagesLEED AP ND Candidate Handbook - SFLBPERVEZ AHMAD KHANNo ratings yet
- Land Capability Unit of Erosion in Gis Application For Kalikajar District, Wonosobo RegencyDocument6 pagesLand Capability Unit of Erosion in Gis Application For Kalikajar District, Wonosobo Regencyarmeino atanaNo ratings yet
- Watching A Typhoon Using Sentinel-1Document39 pagesWatching A Typhoon Using Sentinel-1James GulreyNo ratings yet
- RIYAGUPTA MidSemDocument14 pagesRIYAGUPTA MidSemanaya jianaNo ratings yet
- Lab 4B Moles of Iron and CopperDocument6 pagesLab 4B Moles of Iron and CopperLaura Sitar0% (1)
- BTech - Chem Engg - Course StructureDocument6 pagesBTech - Chem Engg - Course Structureramesh dasariNo ratings yet
- School of Engineering Department of Mechanical EngineeringDocument17 pagesSchool of Engineering Department of Mechanical EngineeringMohammed KawashNo ratings yet
- Research in Educ 215 - LDM Group 7Document25 pagesResearch in Educ 215 - LDM Group 7J GATUSNo ratings yet
- Plant Floor Safety: Summer EditionDocument72 pagesPlant Floor Safety: Summer EditionStefanos DiamantisNo ratings yet
- Non Aqueous Titrations by Gunja ChtaurvediDocument10 pagesNon Aqueous Titrations by Gunja ChtaurvediGunja Chaturvedi88% (8)
- Percorso Ii: The Led Roadway Lighting..Document2 pagesPercorso Ii: The Led Roadway Lighting..ChangKhenNo ratings yet
- Clinical and Forensic Interviewing Sattler JeromeDocument9 pagesClinical and Forensic Interviewing Sattler Jeromeraphael840% (1)
- Hiwin Gen Ballscrew Catalogue EngDocument178 pagesHiwin Gen Ballscrew Catalogue EngValeriy KobaNo ratings yet
- CPCCCA3025 Self Study GuideDocument9 pagesCPCCCA3025 Self Study GuidePranay BansalNo ratings yet
- MTEX Plot Pole Figures and Inverse Pole FiguresDocument9 pagesMTEX Plot Pole Figures and Inverse Pole FiguresIniyan Thiruselvam Navaladi KarthikeyanNo ratings yet
- Amazon Food Review Clustering Using K-Means, Agglomerative & DBSCANDocument79 pagesAmazon Food Review Clustering Using K-Means, Agglomerative & DBSCANkrishnaNo ratings yet
- Graduate School: Mariano Marcos State UniversityDocument2 pagesGraduate School: Mariano Marcos State UniversityLeslie Anne BiteNo ratings yet
- Grade 4 DLL Quarter 2 Week 9 (Sir Bien Cruz)Document38 pagesGrade 4 DLL Quarter 2 Week 9 (Sir Bien Cruz)FUMIKO SOPHIANo ratings yet
- Inovasi Kurikulum Berdasarkan Komponen Kurikulum Strategi Dan Evaluasi Oleh: Sri MaryatiDocument16 pagesInovasi Kurikulum Berdasarkan Komponen Kurikulum Strategi Dan Evaluasi Oleh: Sri MaryatiFitroh NailulNo ratings yet
- Renowned Professors in RussiaDocument5 pagesRenowned Professors in RussiaAfias Thomas MatheNo ratings yet
- Warehouse SimulationDocument14 pagesWarehouse SimulationRISHAB KABDI JAINNo ratings yet