You might also like
- ALOS AccuracyDocument11 pagesALOS AccuracyPercy PeraltaNo ratings yet
- Senkova Etal 2007Document14 pagesSenkova Etal 2007Libeesh LukoseNo ratings yet
- First HF Radar Measurements of Summer Mesopause Echoes at SURADocument7 pagesFirst HF Radar Measurements of Summer Mesopause Echoes at SURAshelleyNo ratings yet
- First HF Radar Measurements of Summer Mesopause Echoes at SURADocument7 pagesFirst HF Radar Measurements of Summer Mesopause Echoes at SURANathalieMoyonNo ratings yet
- Time-Frequency Analysis of Backscattered Lidar Signal To Study Atmosphere DynamicsDocument3 pagesTime-Frequency Analysis of Backscattered Lidar Signal To Study Atmosphere DynamicsPiyush ßlâçklîstëdNo ratings yet
- Seismic ReflectionDocument21 pagesSeismic Reflectionvelkus2013No ratings yet
- Multifrequency VLF+LF Receiver (Multifrekvens VLF+LF MottagareDocument10 pagesMultifrequency VLF+LF Receiver (Multifrekvens VLF+LF MottagareZakir ZainalNo ratings yet
- Backscatter Measurements Over Vegetation by Ground-Based Microwave RadarsDocument4 pagesBackscatter Measurements Over Vegetation by Ground-Based Microwave RadarsMohamad_Abbas_2630No ratings yet
- Simultaneous Dual-Point In-Situ Measurements of Ionospheric Structures Using Space Tethers: TSS-1RobservtionsDocument4 pagesSimultaneous Dual-Point In-Situ Measurements of Ionospheric Structures Using Space Tethers: TSS-1RobservtionsShagun AggarwalNo ratings yet
- Standard Guide for Using GPR for Subsurface InvestigationDocument9 pagesStandard Guide for Using GPR for Subsurface InvestigationLaurentiu PopescuNo ratings yet
- Anomalous PropagationDocument26 pagesAnomalous PropagationmanjitkamalNo ratings yet
- What Is AM1.5Document4 pagesWhat Is AM1.5Vivek BelaNo ratings yet
- Decorrelation in Interferometric Radar Echoes @@ H. A. Zebker and J. VillasenorDocument10 pagesDecorrelation in Interferometric Radar Echoes @@ H. A. Zebker and J. VillasenorÁngelGarcíaDiestroNo ratings yet
- Survey Method SummariesDocument4 pagesSurvey Method Summariesvelkus2013No ratings yet
- J4.8 Wind Energy Applications of Synthetic Aperture Radar Merete B. Christiansen and Charlotte B. HasagerDocument6 pagesJ4.8 Wind Energy Applications of Synthetic Aperture Radar Merete B. Christiansen and Charlotte B. HasagerpremNo ratings yet
- Separation of Wind Sea and Swell From Nearshore Ocean Wave SpectraDocument4 pagesSeparation of Wind Sea and Swell From Nearshore Ocean Wave Spectrayanickdouce5408No ratings yet
- Cross Sea Detection Based On Synthetic Aperture Radar (Sar) Data and Numerical Wave Model (Wam)Document6 pagesCross Sea Detection Based On Synthetic Aperture Radar (Sar) Data and Numerical Wave Model (Wam)Gautam SudhirNo ratings yet
- Electrical Potential Distributions in ADocument8 pagesElectrical Potential Distributions in APetranthosNo ratings yet
- GPR Ohio stateBASICS PDFDocument21 pagesGPR Ohio stateBASICS PDFSavita Kiran BNo ratings yet
- GlossaryDocument48 pagesGlossaryDiego GualdronNo ratings yet
- Atmosheric Turbulence CharacterizationDocument12 pagesAtmosheric Turbulence CharacterizationMvrzo Gomez AANo ratings yet
- Preliminary study detects near surface geothermal features using optical and SAR imageryDocument3 pagesPreliminary study detects near surface geothermal features using optical and SAR imageryaghiNo ratings yet
- RADARDocument45 pagesRADARSummer KoNo ratings yet
- InTech and CloudsDocument17 pagesInTech and Cloudsla_roro3310No ratings yet
- Sensors 3 WithfigsDocument42 pagesSensors 3 WithfigsXkalligerNo ratings yet
- Characteristics of H-V SpectrumDocument2 pagesCharacteristics of H-V SpectrummarcosNo ratings yet
- Determining Planetary Boundary Layer Height by Micro-Pulse Lidar With Validation by UAV Measurements - Aerosol and Air Quality ResearchDocument15 pagesDetermining Planetary Boundary Layer Height by Micro-Pulse Lidar With Validation by UAV Measurements - Aerosol and Air Quality ResearchRashmi SahuNo ratings yet
- PM and JONSWAP Wave Spectral ComparisonDocument4 pagesPM and JONSWAP Wave Spectral Comparisonthefoot39No ratings yet
- Observation of Boundary Layer Aerosols Using A Continuously Operated, Portable Lidar SystemDocument8 pagesObservation of Boundary Layer Aerosols Using A Continuously Operated, Portable Lidar SystemramanariesNo ratings yet
- Ef FaradayDocument8 pagesEf FaradayOscar EustáchioNo ratings yet
- 10 1016@j Isprsjprs 2015 10 003Document13 pages10 1016@j Isprsjprs 2015 10 003RenzoNo ratings yet
- Focused Inversion of Vertical Radar Profile (VRP) Traveltime DataDocument10 pagesFocused Inversion of Vertical Radar Profile (VRP) Traveltime Datafds75No ratings yet
- ALADIN Laser Frequency Stability and Its Impact OnDocument29 pagesALADIN Laser Frequency Stability and Its Impact On夕何No ratings yet
- Li 2015Document10 pagesLi 2015isaanisaanNo ratings yet
- MethodologyDocument10 pagesMethodologyola pedensNo ratings yet
- Flood Boundary Delineation From Synthetic Aperture Radar Imagery Using A Statistical Active Contour ModelDocument20 pagesFlood Boundary Delineation From Synthetic Aperture Radar Imagery Using A Statistical Active Contour ModelKiran SriramNo ratings yet
- Time Series Analysis of InSAR Data Methods and TrendsDocument13 pagesTime Series Analysis of InSAR Data Methods and TrendsRahardian DwityaNo ratings yet
- MRS: A New Geophysical Technique For Groundwater Work: Hydrogeophysics Hydrogeophysics SPECIALSECTION: HydrogeophysicsDocument6 pagesMRS: A New Geophysical Technique For Groundwater Work: Hydrogeophysics Hydrogeophysics SPECIALSECTION: Hydrogeophysicsjaspalsingh3237No ratings yet
- 213 Laserscanning09Document6 pages213 Laserscanning09fargotty210026No ratings yet
- Radar PolarimetryDocument11 pagesRadar Polarimetryyudinraylerio.garciaNo ratings yet
- Schumann Resonance Tool Investigating Planetary AtmosphericDocument5 pagesSchumann Resonance Tool Investigating Planetary AtmosphericPhilly BoroNo ratings yet
- What is Synthetic Aperture Radar (SAR) and its ApplicationsDocument12 pagesWhat is Synthetic Aperture Radar (SAR) and its ApplicationsShashibhusan MohantaNo ratings yet
- Project Progress ReportDocument10 pagesProject Progress ReportKuldip Lohchab0% (1)
- Observations of Gravity WavesDocument6 pagesObservations of Gravity WavesVermilion~No ratings yet
- Paparazzo 1997Document10 pagesPaparazzo 1997KazuoNo ratings yet
- Geophys. J. Int. 2003 Forbriger 719 34Document16 pagesGeophys. J. Int. 2003 Forbriger 719 34Thya RahmaNo ratings yet
- Gph301 Lect2 Seismic1 ElwaheidiDocument29 pagesGph301 Lect2 Seismic1 ElwaheidiRoland Rawlins IgaborNo ratings yet
- Aero-Optical Properties of Subsonic Turbulent Boundary LayersDocument41 pagesAero-Optical Properties of Subsonic Turbulent Boundary Layersst ylmzNo ratings yet
- Friederich GJI 1994Document18 pagesFriederich GJI 1994anurag kumarNo ratings yet
- Spaceborne Synthetic Aperture Radar (SAR) Applications in Marine Meteorology Xiaofeng Li Noaa/NesdisDocument35 pagesSpaceborne Synthetic Aperture Radar (SAR) Applications in Marine Meteorology Xiaofeng Li Noaa/Nesdisestebanparedes666No ratings yet
- 8 Electromagnetic Methods of Lightning LocationDocument17 pages8 Electromagnetic Methods of Lightning LocationMellina LisboaNo ratings yet
- Jurnal HarismanDocument8 pagesJurnal HarismanHarisman ErickNo ratings yet
- Ionospheric Threats To Space-Based Augmentation System DevelopmentDocument10 pagesIonospheric Threats To Space-Based Augmentation System DevelopmentMohith DNo ratings yet
- Bosch Muller Near Surface 05Document12 pagesBosch Muller Near Surface 05Novia SetyaNo ratings yet
- High Resolution 3D Image Reconstruction Based On Multistatic UWB Phase ProcessingDocument11 pagesHigh Resolution 3D Image Reconstruction Based On Multistatic UWB Phase ProcessingNelson CruzNo ratings yet
- Computer Simulation of Ground Penetrating Radar Propagation Through A FreshwaterDocument22 pagesComputer Simulation of Ground Penetrating Radar Propagation Through A FreshwaterMahfooz HafezNo ratings yet
- Presentation G PRGDocument28 pagesPresentation G PRGNajwan Fz KamarulzamanNo ratings yet
- PLASMA TRANSPORT 1-S2.0-S0273117718308676-AmDocument20 pagesPLASMA TRANSPORT 1-S2.0-S0273117718308676-Amolaleyenifemi95No ratings yet
- Impact and Mitigation of Ionospheric Anomalies On Ground-BasedDocument10 pagesImpact and Mitigation of Ionospheric Anomalies On Ground-BasedLuis Di PintoNo ratings yet
- Chapter (Iii) : Thermochemistry Lecture (5-6) OutlineDocument30 pagesChapter (Iii) : Thermochemistry Lecture (5-6) OutlineAndres OrtegaNo ratings yet
- CV Stem Packing and Sealant AssessmentDocument16 pagesCV Stem Packing and Sealant AssessmentAndres OrtegaNo ratings yet
- Ayan HowtocontrolfeelingDocument7 pagesAyan HowtocontrolfeelingBikash KhanalNo ratings yet
- Ayan HowtocontrolfeelingDocument7 pagesAyan HowtocontrolfeelingBikash KhanalNo ratings yet
- Assignment 2 Problems For Momentum TransferDocument2 pagesAssignment 2 Problems For Momentum TransferZiyad Al Abasie0% (1)
- German Level A1 DescriptionDocument1 pageGerman Level A1 DescriptionAndres OrtegaNo ratings yet
- Emotional Intelligence - New Perspectives and Applications PDFDocument300 pagesEmotional Intelligence - New Perspectives and Applications PDFJonas Araujo De Avila CamposNo ratings yet
- Shell Momentum BalanceDocument59 pagesShell Momentum BalanceAndres OrtegaNo ratings yet
- PLC & Energy Co-GenerationDocument34 pagesPLC & Energy Co-GenerationAndres OrtegaNo ratings yet
- jrc102053 - Lb-Na-27356-En-N (Online) - v4 2016.Document70 pagesjrc102053 - Lb-Na-27356-En-N (Online) - v4 2016.Andres OrtegaNo ratings yet
- Life Cycle Impact AssessmentDocument105 pagesLife Cycle Impact AssessmentAndres OrtegaNo ratings yet
- Human Toxicity Potential InLCA Selected Papers InLDocument19 pagesHuman Toxicity Potential InLCA Selected Papers InLAndres OrtegaNo ratings yet
- Solution of Momentum Transport Problems Using Navier Stokes EquationDocument21 pagesSolution of Momentum Transport Problems Using Navier Stokes EquationAndres OrtegaNo ratings yet
- Slit Flow Problem: Shear Stress Distribution and Velocity Profile DerivationDocument50 pagesSlit Flow Problem: Shear Stress Distribution and Velocity Profile DerivationDikaNo ratings yet
- COI-corresponding Author FormDocument1 pageCOI-corresponding Author FormStaphanie MelNo ratings yet
- Scientific Method of ResearchDocument9 pagesScientific Method of Researchsaad aliNo ratings yet
- Life Cycle Impact AssessmentDocument105 pagesLife Cycle Impact AssessmentAndres OrtegaNo ratings yet
- Atmosphere: Atmospheric Ozone and Methane in A Changing ClimateDocument18 pagesAtmosphere: Atmospheric Ozone and Methane in A Changing ClimateAndres OrtegaNo ratings yet
- COI-corresponding Author FormDocument1 pageCOI-corresponding Author FormStaphanie MelNo ratings yet
- SlideMembers FreePPTTemplateVRVirtualReality PS 4904Document6 pagesSlideMembers FreePPTTemplateVRVirtualReality PS 4904Jonathan SimanjuntajNo ratings yet
- ORG LAB Extraction2009Document10 pagesORG LAB Extraction2009Ivan Markus KiranaNo ratings yet
- Constraints On The Production of Nitric Oxide by Lightning As Inferred From Satellite ObservationsDocument17 pagesConstraints On The Production of Nitric Oxide by Lightning As Inferred From Satellite ObservationsAndres OrtegaNo ratings yet
- Orange Memphis by SlidesgoDocument47 pagesOrange Memphis by SlidesgoRuth Mary FloresNo ratings yet
- Geometric Business by SlidesgoDocument46 pagesGeometric Business by SlidesgoAndres OrtegaNo ratings yet
- Scientific Method of ResearchDocument9 pagesScientific Method of Researchsaad aliNo ratings yet
- Energies 12 02717Document14 pagesEnergies 12 02717Andres OrtegaNo ratings yet
- EDTA Titrations: Quantitative Chemical Analysis Eighth EditionDocument24 pagesEDTA Titrations: Quantitative Chemical Analysis Eighth EditionAndres OrtegaNo ratings yet
- Flash Distillation ExplainedDocument14 pagesFlash Distillation ExplainedEsther Chung0% (1)
- IS 13920 Amendment Provides Updates to Ductile Design CodeDocument3 pagesIS 13920 Amendment Provides Updates to Ductile Design CodeParchuri PraveenNo ratings yet
- Impact Jet Lab 3Document9 pagesImpact Jet Lab 3Dário Da SilvaNo ratings yet
- FOUNDATION DESIGN EXAMPLESDocument0 pagesFOUNDATION DESIGN EXAMPLESLaura HernandezNo ratings yet
- CalorimetryDocument20 pagesCalorimetrySB KP100% (1)
- Lab 4 - Torsion Test (1) SXSCDDocument18 pagesLab 4 - Torsion Test (1) SXSCDThaneswaran BaluNo ratings yet
- R05410804 ChemicalprocessequipmentdesignDocument9 pagesR05410804 ChemicalprocessequipmentdesignSamiullah MohammedNo ratings yet
- Govt - Polytechnic, Beed. 2021-22: CertificateDocument9 pagesGovt - Polytechnic, Beed. 2021-22: CertificateUttareshwarNo ratings yet
- Exercise Solid FluidDocument3 pagesExercise Solid FluidChai Chun TanNo ratings yet
- Line Sizing Tool Hydrogen LineDocument31 pagesLine Sizing Tool Hydrogen LineAhmed HassanNo ratings yet
- Concrete 12 May 2023Document5 pagesConcrete 12 May 2023Daryl ArizoNo ratings yet
- TechniqueAnswering - Physics2 - B&C - SPM - SDocument7 pagesTechniqueAnswering - Physics2 - B&C - SPM - Ssyafiqahdaud100% (1)
- Forces in FluidsDocument8 pagesForces in FluidsEsaya PerezNo ratings yet
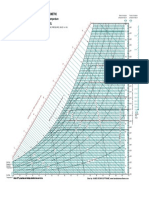
- Psychrometric chart grains moisture pounds dry airDocument1 pagePsychrometric chart grains moisture pounds dry airEstebanCórdobaNo ratings yet
- MONORAIL BEAM ANALYSIS TOOLDocument14 pagesMONORAIL BEAM ANALYSIS TOOLMohamed NkNo ratings yet
- Vapour Compression RefrigerationDocument38 pagesVapour Compression RefrigerationArvind75% (4)
- DB16 MMDocument1 pageDB16 MMGooddayBybsNo ratings yet
- Steam and Rankine Cycle OtDocument5 pagesSteam and Rankine Cycle OtRegineil JavierNo ratings yet
- Fisher CV ValuesDocument220 pagesFisher CV Valuesthehammer2100% (3)
- Singularity FunctionsDocument1 pageSingularity FunctionsCharlie SiaNo ratings yet
- HEAT EXCHANGER FinalDocument64 pagesHEAT EXCHANGER Finaljoker princeNo ratings yet
- Pielichowska 2014 ProMatSci Review PCM For TESDocument57 pagesPielichowska 2014 ProMatSci Review PCM For TESJose Iglesias PradoNo ratings yet
- RELAP5/MOD3.3 USER'S GUIDE AND INPUT REQUIREMENTSDocument160 pagesRELAP5/MOD3.3 USER'S GUIDE AND INPUT REQUIREMENTSWilhelm ThorleyNo ratings yet
- BMS point list Excel fileDocument2 pagesBMS point list Excel fileTất ĐặngNo ratings yet
- CN3Elastic WaveDocument10 pagesCN3Elastic WaveRabiBasuNo ratings yet
- SH1 Dhi P1PCB M M01 Pid 5325Document1 pageSH1 Dhi P1PCB M M01 Pid 5325Thanh SonNo ratings yet
- HVAC - Equipment ScheduleDocument1 pageHVAC - Equipment ScheduleRommel Dela SernaNo ratings yet
- CE 580 Computational Fluid Dynamics TechniquesDocument2 pagesCE 580 Computational Fluid Dynamics TechniquesDeniz C. AydinNo ratings yet
- Flow Over A Broad-Crested Weir in Subcritical Flow Conditions, Physical StudyDocument6 pagesFlow Over A Broad-Crested Weir in Subcritical Flow Conditions, Physical Studyho_afsharNo ratings yet