You might also like
- A New System of Alternating Current Motors and Transformers and Other EssaysFrom EverandA New System of Alternating Current Motors and Transformers and Other EssaysRating: 5 out of 5 stars5/5 (1)
- A New System of Alternating Current Motors and TransformersFrom EverandA New System of Alternating Current Motors and TransformersRating: 1 out of 5 stars1/5 (1)
- Electrical MachinesDocument26 pagesElectrical MachinesVaibhav BacchavNo ratings yet
- Electrical Machines - II Lecture OverviewDocument9 pagesElectrical Machines - II Lecture OverviewsatyaNo ratings yet
- Modeling and Operation of Synchronous GeneratorsDocument25 pagesModeling and Operation of Synchronous GeneratorsArshad AliNo ratings yet
- Electrical MachinesDocument15 pagesElectrical Machinesraj sekharNo ratings yet
- Understanding Induction MotorsDocument23 pagesUnderstanding Induction Motorssai netNo ratings yet
- Machine Tool Fundamentals: Understanding the LatheDocument12 pagesMachine Tool Fundamentals: Understanding the LatheNah Sr AdNo ratings yet
- Single Phase MotorsDocument2 pagesSingle Phase MotorsVishwanath B RajashekarNo ratings yet
- Working Principle of an AmmeterDocument11 pagesWorking Principle of an Ammeterpradnyajadhav225_136No ratings yet
- How Brushless Motors Work (BLDC Motors)Document41 pagesHow Brushless Motors Work (BLDC Motors)Chandrashekar ReddyNo ratings yet
- Lec 6Document8 pagesLec 6Government Polytechnic Gulzarbagh Patna 7No ratings yet
- Lec 32Document31 pagesLec 32azitaggNo ratings yet
- Lec 5Document15 pagesLec 5Fernando Paez MendizabalNo ratings yet
- Advanced Electric Drives Prof. S. P. Das Department of Electrical Engineering Indian Institute of Technology, Kanpur Lecture - 38Document17 pagesAdvanced Electric Drives Prof. S. P. Das Department of Electrical Engineering Indian Institute of Technology, Kanpur Lecture - 38manivithNo ratings yet
- Lec 1Document10 pagesLec 1Lokesh Naidu TummalaNo ratings yet
- Lec22 PDFDocument11 pagesLec22 PDFARIJIT ROYNo ratings yet
- Documentation Stepper MotorDocument22 pagesDocumentation Stepper MotorsolidwormNo ratings yet
- Brushless Motor and ArduinoDocument8 pagesBrushless Motor and ArduinostellaNo ratings yet
- Control Engineering Prof. S. D. Agashe Department of Electrical Engineering Indian Institute of Technology, Bombay Lecture - 06Document35 pagesControl Engineering Prof. S. D. Agashe Department of Electrical Engineering Indian Institute of Technology, Bombay Lecture - 06Deepak Kumar NayakNo ratings yet
- Lec 27Document18 pagesLec 27YOO SHINNo ratings yet
- Lec 49Document12 pagesLec 49Srotriya TripathiNo ratings yet
- Lec 30Document13 pagesLec 30Jamil AhmadNo ratings yet
- Smoke Sensor ModuleDocument54 pagesSmoke Sensor ModuleakashNo ratings yet
- Moving Iron Instruments: A Simple Yet Effective AmmeterDocument6 pagesMoving Iron Instruments: A Simple Yet Effective AmmeterLokesh Naidu TummalaNo ratings yet
- Induction Motor CharacteristicsDocument14 pagesInduction Motor CharacteristicsAnnaRajNo ratings yet
- Lec3 PDFDocument20 pagesLec3 PDFTesh SiNo ratings yet
- What Is ADocument10 pagesWhat Is AsahiiiiNo ratings yet
- SynchrosDocument43 pagesSynchrosjashjaNo ratings yet
- Lec 33Document30 pagesLec 33azitaggNo ratings yet
- Principle of Hydraulic Machines and System Design Dr. Pranab K. Mondal Department of Mechanical Engineering Indian Institute of Technology, GuwahatiDocument19 pagesPrinciple of Hydraulic Machines and System Design Dr. Pranab K. Mondal Department of Mechanical Engineering Indian Institute of Technology, GuwahatiYOO SHINNo ratings yet
- Decogging Tutorial V1Document29 pagesDecogging Tutorial V1KineticonNo ratings yet
- Stepper Motor Theory of OperationDocument11 pagesStepper Motor Theory of OperationSherif EltoukhiNo ratings yet
- Working Principle of Induction MotorDocument1 pageWorking Principle of Induction Motormuhammad adnannNo ratings yet
- Induction Motor: Stator ConstructionDocument9 pagesInduction Motor: Stator ConstructionMohamed IbrahemNo ratings yet
- Department of Electronics & Communication Course: Microcontroller Based System Design Course Code: ECE-358Document8 pagesDepartment of Electronics & Communication Course: Microcontroller Based System Design Course Code: ECE-358Varun SinghNo ratings yet
- Advanced Electric Drives lecture transformed into dq variablesDocument20 pagesAdvanced Electric Drives lecture transformed into dq variablesOwais KKNo ratings yet
- Homework 7 Induction Motor 1Document3 pagesHomework 7 Induction Motor 1JamrNo ratings yet
- Electrical Measurement Dynamics and DampingDocument8 pagesElectrical Measurement Dynamics and DampingGovernment Polytechnic Gulzarbagh Patna 7No ratings yet
- Introduction To Induction Motor: Experiment 11Document4 pagesIntroduction To Induction Motor: Experiment 11Apna VeerNo ratings yet
- AC MotorsDocument48 pagesAC MotorsBrandon SookdeoNo ratings yet
- Unit V: Krishan Arora Assistant Professor Lovely Professional UniversityDocument52 pagesUnit V: Krishan Arora Assistant Professor Lovely Professional UniversityVinay PrakashNo ratings yet
- Auto Synchronous MotorDocument3 pagesAuto Synchronous Motorojunga.samuel21No ratings yet
- Moving Iron Instruments: A Simple Yet Effective Current Measurement TechniqueDocument7 pagesMoving Iron Instruments: A Simple Yet Effective Current Measurement TechniqueGovernment Polytechnic Gulzarbagh Patna 7No ratings yet
- Stepper MotorDocument18 pagesStepper MotorLasantha Abeykoon67% (3)
- Lec 12Document10 pagesLec 12Rupesh TiwariNo ratings yet
- Stepper MotorDocument10 pagesStepper MotorboscoNo ratings yet
- Gravity LightDocument97 pagesGravity LightArun Kumar Yadav100% (1)
- 3 Phase Induction MotorsDocument10 pages3 Phase Induction MotorsSTIP Teknik BravoNo ratings yet
- 3 Phase Induction Motors PDFDocument11 pages3 Phase Induction Motors PDFFauzan Dimas KusyonoNo ratings yet
- Working of Single Phase Induction MotorsDocument4 pagesWorking of Single Phase Induction MotorsMarcoMarcassaNo ratings yet
- Lec 2Document42 pagesLec 2Venkata DineshNo ratings yet
- Unit 3 - Study MaterialDocument8 pagesUnit 3 - Study MaterialHazard JoshiNo ratings yet
- Single Phase Induction Motor and Stepper MotorDocument11 pagesSingle Phase Induction Motor and Stepper MotorManthan deshmukhNo ratings yet
- Information-No - 1 1 7-1Document12 pagesInformation-No - 1 1 7-1Black PearlNo ratings yet
- Lec 16 - Industrial Electronics - Industion MotorDocument55 pagesLec 16 - Industrial Electronics - Industion MotorSaLman GulNo ratings yet
- Induction MotorDocument4 pagesInduction MotorSenjuti DeNo ratings yet
- Why Polyphase Induction Never Attains Synchronous SpeedDocument2 pagesWhy Polyphase Induction Never Attains Synchronous SpeedKaruppu SamyNo ratings yet
- Electrical Machines: Lecture Notes for Electrical Machines CourseFrom EverandElectrical Machines: Lecture Notes for Electrical Machines CourseNo ratings yet
- Ds In0014 en CoDocument10 pagesDs In0014 en CoazitaggNo ratings yet
- Ds Pe8161 en CoDocument13 pagesDs Pe8161 en Comohamadhosein mohamadiNo ratings yet
- Smart Valve Flow CondDocument4 pagesSmart Valve Flow CondazitaggNo ratings yet
- Ds Pe8165 en CoDocument9 pagesDs Pe8165 en CoKaushal ParmarNo ratings yet
- Hook Up Diagram EX FLOW MFMDocument1 pageHook Up Diagram EX FLOW MFMazitaggNo ratings yet
- 1st IrSHM Paper Abstracts - 2Document9 pages1st IrSHM Paper Abstracts - 2azitaggNo ratings yet
- S-Mass Series Coriolis Mass Flow and Density Meters and SMT Series TransmittersDocument14 pagesS-Mass Series Coriolis Mass Flow and Density Meters and SMT Series TransmittersazitaggNo ratings yet
- 5372 40875732 52TDocument2 pages5372 40875732 52TazitaggNo ratings yet
- Rosemount Custom Liquid Data SheetDocument2 pagesRosemount Custom Liquid Data SheetazitaggNo ratings yet
- TB 06001Document2 pagesTB 06001Tien Nguyen TatNo ratings yet
- Accuracy PDFDocument2 pagesAccuracy PDFagus kurniawanNo ratings yet
- RTDDocument4 pagesRTDazitaggNo ratings yet
- Cables - Cable For Petrochemical Plants IEEESTANDARD1242Document10 pagesCables - Cable For Petrochemical Plants IEEESTANDARD1242cadtil100% (1)
- شبکه های کامپیوتر PDFDocument40 pagesشبکه های کامپیوتر PDFazitaggNo ratings yet
- The Smith Meter Microloadnet SpecificatonsDocument6 pagesThe Smith Meter Microloadnet SpecificatonsazitaggNo ratings yet
- Transaction Log Excel SpreadsheetDocument4 pagesTransaction Log Excel SpreadsheetazitaggNo ratings yet
- Model S100-D and S200-D Density Sensor: FeaturesDocument6 pagesModel S100-D and S200-D Density Sensor: FeaturesazitaggNo ratings yet
- Lec 32Document31 pagesLec 32azitaggNo ratings yet
- Edu Cables Fiber Optic PDFDocument11 pagesEdu Cables Fiber Optic PDFazitaggNo ratings yet
- 750 V 70 C PVC Insulated and Double Sheathed Power Cable, With Concentric ConductorsDocument4 pages750 V 70 C PVC Insulated and Double Sheathed Power Cable, With Concentric ConductorsazitaggNo ratings yet
- AccuLoad III CalculationsDocument24 pagesAccuLoad III CalculationsazitaggNo ratings yet
- Control Valve - I PDFDocument50 pagesControl Valve - I PDFVinaya NaralasettyNo ratings yet
- Lec15 PDFDocument27 pagesLec15 PDFazitaggNo ratings yet
- Control Valve Characteristics & SizingDocument8 pagesControl Valve Characteristics & SizingazitaggNo ratings yet
- Lec37 2Document47 pagesLec37 2azitaggNo ratings yet
- Lec 33Document30 pagesLec 33azitaggNo ratings yet
- ActuatorsDocument20 pagesActuatorsmohamedbadawyNo ratings yet
- Lec40 2Document46 pagesLec40 2azitaggNo ratings yet
- 3300 5mm Transducer: Specifications and Ordering InformationDocument13 pages3300 5mm Transducer: Specifications and Ordering InformationazitaggNo ratings yet
- 1.3 Wiring Specifications: 1.3.1 Cable SelectionDocument1 page1.3 Wiring Specifications: 1.3.1 Cable SelectionjlcegarraNo ratings yet
- g481 1 3 1 Work and Energy ConservationDocument6 pagesg481 1 3 1 Work and Energy Conservationapi-236179294No ratings yet
- Introduction and Basic Concepts: Mohamed ElgabailiDocument51 pagesIntroduction and Basic Concepts: Mohamed ElgabailiMohammed AlryaniNo ratings yet
- Renewable Energy Sources and TerminologyDocument14 pagesRenewable Energy Sources and TerminologyDr.Nandakumar ENo ratings yet
- 4 BuoyancyDocument5 pages4 BuoyancyDaniel Vasquez0% (1)
- BSCS Mid Term Basic Electronics 2019Document4 pagesBSCS Mid Term Basic Electronics 2019Farwa JaffriNo ratings yet
- Traction Simulation Example Using ETrax Analysis.Document44 pagesTraction Simulation Example Using ETrax Analysis.veemandal100% (2)
- TMG-R 50: Ricardo Diesel GensetDocument2 pagesTMG-R 50: Ricardo Diesel GensetNikolche Mitrikjevski100% (1)
- Design of Vertical Gas-Liquid SeparatorDocument13 pagesDesign of Vertical Gas-Liquid SeparatorAli AhsanNo ratings yet
- Scrubber DesignDocument31 pagesScrubber Designmakwana1No ratings yet
- Physics II ProblemsDocument1 pagePhysics II ProblemsBOSS BOSSNo ratings yet
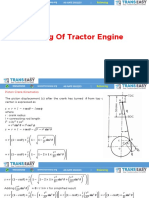
- Balancing of Tractor EngineDocument17 pagesBalancing of Tractor EngineManish ChoudharyNo ratings yet
- Dr. Joseph Pedlosky (Auth.) - Waves in The Ocean and Atmosphere - Introduction To Wave Dynamics-Springer-Verlag Berlin Heidelberg (2003) PDFDocument258 pagesDr. Joseph Pedlosky (Auth.) - Waves in The Ocean and Atmosphere - Introduction To Wave Dynamics-Springer-Verlag Berlin Heidelberg (2003) PDFMephis BalthasarNo ratings yet
- Chapter Six The Momentum Equation and Its ApplicationsDocument16 pagesChapter Six The Momentum Equation and Its ApplicationsŚæd ÖsmąņNo ratings yet
- E04-Ship Geometry & Hydrostatic CalculationsDocument2 pagesE04-Ship Geometry & Hydrostatic Calculationsarise tettehNo ratings yet
- Classical Mechanics III by Ashoke Sen: Dynamics of Rigid Body MotionDocument21 pagesClassical Mechanics III by Ashoke Sen: Dynamics of Rigid Body MotionSANDIPAN BHATTACHERJEENo ratings yet
- Avr - LX321-V1.2.1 - Eng - Ge 06Document16 pagesAvr - LX321-V1.2.1 - Eng - Ge 06Mamadou lyNo ratings yet
- Correcting Faults That CauseDocument6 pagesCorrecting Faults That Causearmando nolasco rodriguezNo ratings yet
- eArt-Calculating Overpressure From BLEVE ExplosionsDocument6 pageseArt-Calculating Overpressure From BLEVE ExplosionsJurizal Julian LuthanNo ratings yet
- Aghighi ValDocument11 pagesAghighi Valkada hanafiNo ratings yet
- CHAPTER 3 Resultants of Coplanar Force SystemsDocument57 pagesCHAPTER 3 Resultants of Coplanar Force SystemsDavid Murphy100% (2)
- 07.1.12 ASTM E337 Medición de Condiciones AmbientalesDocument24 pages07.1.12 ASTM E337 Medición de Condiciones AmbientalesHector ChiroqueNo ratings yet
- Toggle Switches Mil-S-83731Document1 pageToggle Switches Mil-S-83731Russell GouldenNo ratings yet
- Volume and Surface Areas 2Document6 pagesVolume and Surface Areas 2Liqi FengNo ratings yet
- Manual of B H CURVE 1 PDFDocument5 pagesManual of B H CURVE 1 PDFRUDRA PRASAD MAHANANo ratings yet
- SFC Disconnect SwitchDocument1 pageSFC Disconnect SwitchZakir Hossain BiplobNo ratings yet
- Implementation of Over-Voltage & Under-Voltage Protection SystemDocument54 pagesImplementation of Over-Voltage & Under-Voltage Protection Systemvajiravel407No ratings yet
- HEAT TRANSFER MECHANISMSDocument166 pagesHEAT TRANSFER MECHANISMSGajanan DestotNo ratings yet
- Types of UPS Systems ExplainedDocument10 pagesTypes of UPS Systems ExplainedRahul ItaliyaNo ratings yet
- The Use of Digsilent Power Factory Simulator For "Introduction Into Power Systems" LecturesDocument5 pagesThe Use of Digsilent Power Factory Simulator For "Introduction Into Power Systems" Lecturesveljal6317No ratings yet