You might also like
- Pass Ultrasound Physics Exam Study Guide ReviewFrom EverandPass Ultrasound Physics Exam Study Guide ReviewRating: 4.5 out of 5 stars4.5/5 (2)
- Me146-2 Vibration Engineering Review QuestionsDocument5 pagesMe146-2 Vibration Engineering Review QuestionsCount AechNo ratings yet
- The Physics and Technology of Diagnostic Ultrasound: Study Guide (Second Edition)From EverandThe Physics and Technology of Diagnostic Ultrasound: Study Guide (Second Edition)No ratings yet
- Bernoulli EquationDocument40 pagesBernoulli EquationHassanKM100% (2)
- Amqms PPTDocument10 pagesAmqms PPTParth KelkarNo ratings yet
- Lecture 5Document52 pagesLecture 5Wbamlak AshebrNo ratings yet
- Measurement of Vibration & Axial DisplacementDocument6 pagesMeasurement of Vibration & Axial DisplacementSatNo ratings yet
- Unit 5Document44 pagesUnit 51310 DIVAKKAR MECHNo ratings yet
- HARMONICALLY EXCITED VIBRATION Group 5 ReportDocument22 pagesHARMONICALLY EXCITED VIBRATION Group 5 ReportBenz Andrew RegisNo ratings yet
- Vibration MeasurementDocument21 pagesVibration MeasurementMd.Tanvir Rahman100% (1)
- Measuring Instruments: Ms. Shreedevi S Assistant Professor Department of ECEDocument20 pagesMeasuring Instruments: Ms. Shreedevi S Assistant Professor Department of ECESachin K GowdaNo ratings yet
- Dynamic and Introduction To Explicit PDFDocument41 pagesDynamic and Introduction To Explicit PDFSwaraj Deep SharmaNo ratings yet
- Mechanical Sensor: Group 2Document52 pagesMechanical Sensor: Group 2Catherine M.No ratings yet
- Mechanical Sensor 1Document52 pagesMechanical Sensor 1Catherine M.No ratings yet
- Vibrational Sensors For Sensing Energy Through VibrationsDocument21 pagesVibrational Sensors For Sensing Energy Through VibrationsvijayrajanaNo ratings yet
- Vibration: Analysis and MonitoringDocument53 pagesVibration: Analysis and MonitoringВинисиоNo ratings yet
- Lecture 10 Ultrsonic TherapyDocument66 pagesLecture 10 Ultrsonic TherapyA. ShahNo ratings yet
- AccelerometerDocument31 pagesAccelerometersowbarnikaganesh17No ratings yet
- Vibration Basics PDFDocument11 pagesVibration Basics PDFGanseh100% (1)
- CPS Unit2Document77 pagesCPS Unit2Himanshu RaiNo ratings yet
- UNIT III Motion, Proximity, Ranging, Force, Magnetic and HeadingDocument84 pagesUNIT III Motion, Proximity, Ranging, Force, Magnetic and HeadingAlemeNo ratings yet
- Accelerometers Versus Velocity Sensors - What's The Difference 2Document1 pageAccelerometers Versus Velocity Sensors - What's The Difference 2Nelson Arul NathanNo ratings yet
- Chapter 2 Ese246 PDFDocument96 pagesChapter 2 Ese246 PDFMuhamad AmmarNo ratings yet
- Part I Vibration MeasurementsDocument33 pagesPart I Vibration Measurementswaleed yehiaNo ratings yet
- Topic 10 12 ControlDocument17 pagesTopic 10 12 ControlKsenia Jazrene SanicoNo ratings yet
- Cardiovascular MonitoringDocument32 pagesCardiovascular MonitoringpaulaNo ratings yet
- Lec 32 - 19350 - MEC409Document21 pagesLec 32 - 19350 - MEC409Somesh KumarNo ratings yet
- Vibration Measuring InstrumentsDocument4 pagesVibration Measuring InstrumentsMelvin MhdsNo ratings yet
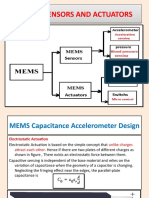
- Memes Sensors and ActuatorsDocument16 pagesMemes Sensors and ActuatorsNaima AlmegryNo ratings yet
- A Review of Design of Shock Absorber Test RigDocument5 pagesA Review of Design of Shock Absorber Test Rigrahul.yerrawarNo ratings yet
- TurbineSupervisoryGuide PDFDocument28 pagesTurbineSupervisoryGuide PDFCormac MyersNo ratings yet
- Primary Sensor: Characteristic and TypesDocument41 pagesPrimary Sensor: Characteristic and TypesAshutosh PandeyNo ratings yet
- Somali National University: Mechanical Measurement (MM 3609)Document33 pagesSomali National University: Mechanical Measurement (MM 3609)Omari AdamNo ratings yet
- VibrationDocument15 pagesVibrationYusman EkaNo ratings yet
- Part 11 Section 1 Vibration Analysis ShortcutDocument19 pagesPart 11 Section 1 Vibration Analysis ShortcutAenur RofiiqNo ratings yet
- Precision: Vibration Measurement With Noncontact Displacement SensorsDocument9 pagesPrecision: Vibration Measurement With Noncontact Displacement SensorsZeeshan FareedNo ratings yet
- Automation & Robotics Motion SensorsDocument37 pagesAutomation & Robotics Motion SensorsHaider-e-KararNo ratings yet
- Ultrasound - SummaryDocument19 pagesUltrasound - SummaryHeidar ZaarourNo ratings yet
- NOTES 4 Sensors For Vibration MeasurementDocument77 pagesNOTES 4 Sensors For Vibration MeasurementmanishpaliNo ratings yet
- AcceleromtereDocument8 pagesAcceleromtereSV TechnologiesNo ratings yet
- Food Microbiology & Microbial Techniques - Fsr2002: Niraj Singh M.Tech-Fsqm I SEM I.D.No. (RA1812036010015)Document14 pagesFood Microbiology & Microbial Techniques - Fsr2002: Niraj Singh M.Tech-Fsqm I SEM I.D.No. (RA1812036010015)Niraj SinghNo ratings yet
- Other Industrial Measuring Devices PDFDocument102 pagesOther Industrial Measuring Devices PDFGaming UserNo ratings yet
- Sensors For Biomedical Applications - Part 1Document51 pagesSensors For Biomedical Applications - Part 1Sohira QaziNo ratings yet
- Most Common Myths About Accelerometers and Frequency Range: Asset ManagementDocument3 pagesMost Common Myths About Accelerometers and Frequency Range: Asset ManagementaabejaroNo ratings yet
- Most Common Myths About Accelerometers and Frequency Range: Asset ManagementDocument3 pagesMost Common Myths About Accelerometers and Frequency Range: Asset ManagementaabejaroNo ratings yet
- Vibration Measurement and AnalysisDocument5 pagesVibration Measurement and AnalysisRosellie Niduaza0% (1)
- Therapeutic: PhysiotherapyDocument25 pagesTherapeutic: PhysiotherapyArsal MushtaqNo ratings yet
- Lecure-2 Sensors For Biomedical ApplicationsDocument98 pagesLecure-2 Sensors For Biomedical ApplicationsDivya Aseeja0% (1)
- Lecture 3. Resistance Strain SensorsDocument34 pagesLecture 3. Resistance Strain SensorsAdnan RafiqueNo ratings yet
- Vibration Measurement & AnalysisDocument48 pagesVibration Measurement & AnalysisSamNo ratings yet
- UT Lesson5 08 12Document27 pagesUT Lesson5 08 12Gulfam HussainNo ratings yet
- Sensor Characteristic: Dr. D. N. Sonawane (WWW - Dnsonawane.in)Document10 pagesSensor Characteristic: Dr. D. N. Sonawane (WWW - Dnsonawane.in)Devki DeshmukhNo ratings yet
- Vibration Sensors 2012 PDFDocument18 pagesVibration Sensors 2012 PDFRajesh Sharma100% (1)
- Sensor Lect8Document30 pagesSensor Lect8morton1472No ratings yet
- Time-of-Flight (Ultrasonic Displacement Sensor)Document23 pagesTime-of-Flight (Ultrasonic Displacement Sensor)igoy saputraNo ratings yet
- LaserDocument32 pagesLaserNishita RanaNo ratings yet
- Accelerometers Versus Velocity Sensors - What's The DifferenceDocument6 pagesAccelerometers Versus Velocity Sensors - What's The DifferenceSasi NimmakayalaNo ratings yet
- Dresser RandDocument71 pagesDresser RandLong Nguyen100% (2)
- 8.1.ultra Sonic-Testing-Part-1Document37 pages8.1.ultra Sonic-Testing-Part-1Mohanad AlmalahNo ratings yet
- Static ElectricityDocument36 pagesStatic ElectricityMayar AzzamNo ratings yet
- Ms. Aware Vaishnavi S. Ms. Chaudhari Ruchika R. Ms. Jadhav Supriya V. Ms. More Janhavi SDocument12 pagesMs. Aware Vaishnavi S. Ms. Chaudhari Ruchika R. Ms. Jadhav Supriya V. Ms. More Janhavi SSagar JamkarNo ratings yet
- 1000 Word Essay About Global WarmingDocument3 pages1000 Word Essay About Global WarmingJean RomeroNo ratings yet
- ElectrolysisDocument56 pagesElectrolysisG M Ali KawsarNo ratings yet
- SF - SafeFlame Data Sheet IR3Document2 pagesSF - SafeFlame Data Sheet IR3Vincent GabrielNo ratings yet
- GATE Production and Industrial Engineering 2008 PDFDocument16 pagesGATE Production and Industrial Engineering 2008 PDFrajurana25No ratings yet
- Western Underground - HV and Ehv Cables-CmeDocument38 pagesWestern Underground - HV and Ehv Cables-CmeA. Hassan100% (2)
- S250NJ3200 223727 DatasheetDocument2 pagesS250NJ3200 223727 DatasheetEAUPDS ProjectNo ratings yet
- For Construction: Bio-Fuel Ethanol Plant in Northern Region ProjectDocument13 pagesFor Construction: Bio-Fuel Ethanol Plant in Northern Region ProjectajmainNo ratings yet
- BD100IR0002 - 0 HIPPS Valves Technical and Budgeting EstimatesDocument32 pagesBD100IR0002 - 0 HIPPS Valves Technical and Budgeting EstimatesDucNo ratings yet
- Equipment Checklist PDFDocument45 pagesEquipment Checklist PDFFandy Agita100% (4)
- Polar Relay For Legacy Teletype ApplicationsDocument4 pagesPolar Relay For Legacy Teletype ApplicationsRandom73No ratings yet
- 2010-08-20 001234 M11Code434TroubleshootingDocument13 pages2010-08-20 001234 M11Code434TroubleshootingVictor Hugo Benitez Paez100% (1)
- Entrenamiento de Servicio Ferreyros: Diagrama de Bloques Ecm & PM Funciones Del ECM Injector SincronizacionDocument10 pagesEntrenamiento de Servicio Ferreyros: Diagrama de Bloques Ecm & PM Funciones Del ECM Injector SincronizacionCapacitaciones RutasNo ratings yet
- Expansion Joint BasicsDocument35 pagesExpansion Joint BasicsRajivharolikarNo ratings yet
- Multiple Choice Questions Subject: Control of Electric Drives Branch: Electrical Engineering Subject Code: 2160913 Semester: 6Document72 pagesMultiple Choice Questions Subject: Control of Electric Drives Branch: Electrical Engineering Subject Code: 2160913 Semester: 6BRIJ NATH SINGH YADAVNo ratings yet
- Fesco Online BillDocument1 pageFesco Online Billmuhammadasif_5839675No ratings yet
- 1952 9 AudioDocument84 pages1952 9 Audiokimbalsummers801100% (1)
- Ahu Rev 130705Document10 pagesAhu Rev 130705dotronganhtuanNo ratings yet
- UDF Data Structure Fluent 6Document19 pagesUDF Data Structure Fluent 6Medo HamedNo ratings yet
- TECS Water Cooled ChillerDocument8 pagesTECS Water Cooled Chillerntt_121987No ratings yet
- Chapter 32Document61 pagesChapter 32KautukBabarNo ratings yet
- Module 9 - ALARP 20150305Document30 pagesModule 9 - ALARP 20150305Muhammad.SaimNo ratings yet
- Koomey S S ManualDocument95 pagesKoomey S S Manualasatyamanoj100% (2)
- Di 1611-2011Document213 pagesDi 1611-2011diktilineNo ratings yet
- WRI. 2016. MRV 101 - Understanding Measurement, Reporting, and Verification of Climate Change MitigationDocument28 pagesWRI. 2016. MRV 101 - Understanding Measurement, Reporting, and Verification of Climate Change Mitigationgnuga12417No ratings yet
- 27MHz LinksDocument32 pages27MHz LinksNguyễn Vĩnh ThắngNo ratings yet
- ARI Standard 850-1993Document10 pagesARI Standard 850-1993shant_mNo ratings yet
- Coolmos Power Mosfet: Ixkc 20N60CDocument4 pagesCoolmos Power Mosfet: Ixkc 20N60CGregori LoayzaNo ratings yet