You might also like
- GATE Electrical - R K KanodiaDocument422 pagesGATE Electrical - R K KanodiaNavajyoth Kumar90% (10)
- Low Noise Microphone Amp PDFDocument18 pagesLow Noise Microphone Amp PDFAlvaro Espagnolo GarcíaNo ratings yet
- A Novel Induction Machine ModelDocument16 pagesA Novel Induction Machine ModelManikanta BondadaNo ratings yet
- Servo MotorDocument16 pagesServo MotorMinh Tuan Tran100% (1)
- Analisis Boss Ds-1 DistortionDocument8 pagesAnalisis Boss Ds-1 DistortionNacho ConsolaniNo ratings yet
- Lang Electronics Shortform CatalogDocument6 pagesLang Electronics Shortform CatalogJOSE COCA GARCIANo ratings yet
- ECE 8830 - Electric Drives: Topic 13: Vector Control of AC Induction MotorsDocument61 pagesECE 8830 - Electric Drives: Topic 13: Vector Control of AC Induction MotorsVikas PatelNo ratings yet
- Simulation of Brushless DC Motor For Performance Analysis Using MATLAB SIMULINK EnvironmentDocument4 pagesSimulation of Brushless DC Motor For Performance Analysis Using MATLAB SIMULINK EnvironmentnandhakumarmeNo ratings yet
- Unit Iii Induction Motor Drives: Dept. of EEEDocument17 pagesUnit Iii Induction Motor Drives: Dept. of EEEmanoj kumarNo ratings yet
- Modelling and Simuation of BLDC Motor in MATLAB GUIDocument5 pagesModelling and Simuation of BLDC Motor in MATLAB GUIvishiwizardNo ratings yet
- Prepared By: Luis Fernando Montoya Chun-Ju Huang Ashish K. SolankiDocument33 pagesPrepared By: Luis Fernando Montoya Chun-Ju Huang Ashish K. SolankigouravNo ratings yet
- AC Drive Theory and Application: Benefits of Using AC DrivesDocument8 pagesAC Drive Theory and Application: Benefits of Using AC DrivesRaghu KodiNo ratings yet
- Simulation & Controlling of Brushless DC Motor Using PI/Fuzzy HybridDocument4 pagesSimulation & Controlling of Brushless DC Motor Using PI/Fuzzy Hybridsunil kumarNo ratings yet
- DC-DC ConverterDocument24 pagesDC-DC ConverterkandularanjithNo ratings yet
- Circuit Simulation of A BLDC MotorDocument4 pagesCircuit Simulation of A BLDC Motorjpmacabasco100% (1)
- Impulse Alignment of Loudspeakers and MicrophonesDocument14 pagesImpulse Alignment of Loudspeakers and MicrophonesyogimgurtNo ratings yet
- Industrial DrivesDocument1 pageIndustrial DrivesSatish NurukurthiNo ratings yet
- The Voltech Handbook of PWM Motor DrivesDocument53 pagesThe Voltech Handbook of PWM Motor DrivesPovaS100% (1)
- On Brushless Motor.Document45 pagesOn Brushless Motor.KUMAR_AMIT199189% (9)
- Discovery of BLDC Motor: Brushless vs. Brushed DC MotorDocument9 pagesDiscovery of BLDC Motor: Brushless vs. Brushed DC MotorNoni MaheshwariNo ratings yet
- Reluctance MotorDocument14 pagesReluctance MotorTeenaNo ratings yet
- Speed Control of Brushless DC Motor Using Fuzzy Logic ControllerDocument9 pagesSpeed Control of Brushless DC Motor Using Fuzzy Logic ControllerIOSRjournalNo ratings yet
- MPUDocument16 pagesMPUarnaldofidelissouzaNo ratings yet
- Radio Telescope Antenna Control System Modelling For Antenna Azimuth Position Using Simulink/MatlabDocument4 pagesRadio Telescope Antenna Control System Modelling For Antenna Azimuth Position Using Simulink/MatlabFahmy R. SaputriNo ratings yet
- Special Electrical MachinesDocument5 pagesSpecial Electrical MachinesEswaran0% (1)
- Space Vector PWM - 2Document6 pagesSpace Vector PWM - 2guanitouNo ratings yet
- Control of BLDC Motor Using dsPIC30F2010 Final Year ProjectDocument54 pagesControl of BLDC Motor Using dsPIC30F2010 Final Year ProjectShreyankh Krishy50% (2)
- BLDC Sinusoidal ControlDocument6 pagesBLDC Sinusoidal ControlOctavian MîrţiNo ratings yet
- BLDCDocument4 pagesBLDCsathishNo ratings yet
- Unit 3Document5 pagesUnit 3Narasimman DonNo ratings yet
- Closed Loop Control of PMSM Motor: Field Oriented Control Using Hall SensorsDocument52 pagesClosed Loop Control of PMSM Motor: Field Oriented Control Using Hall SensorsLoyel RoseNo ratings yet
- Construction and Working of Brushless DC PDFDocument12 pagesConstruction and Working of Brushless DC PDFaswardi8756No ratings yet
- Speed Control of DC MotorDocument31 pagesSpeed Control of DC Motorabhinav. alpheus651997No ratings yet
- Medical Application of BLDCDocument5 pagesMedical Application of BLDCAbd Al HAmidNo ratings yet
- DC Motor Speed Control Using PWMDocument14 pagesDC Motor Speed Control Using PWMVincent KorieNo ratings yet
- Design of A Real Time Smart Honking SystemDocument6 pagesDesign of A Real Time Smart Honking SystemArka MajumdarNo ratings yet
- Brushless DC Motor ReportDocument2 pagesBrushless DC Motor ReportAnonymous 7Q1NIANo ratings yet
- PX7203-Special Electrical Machines PDFDocument11 pagesPX7203-Special Electrical Machines PDFvaishnavisriNo ratings yet
- Four - Quadrant Control SystemsDocument4 pagesFour - Quadrant Control SystemsRICHARDNo ratings yet
- Sensorless Speed Control of Brushless DC Motor With Fuzzy Based EstimationDocument7 pagesSensorless Speed Control of Brushless DC Motor With Fuzzy Based EstimationPhạm Văn TưởngNo ratings yet
- Stepper Motor Speed Control Using FPGADocument14 pagesStepper Motor Speed Control Using FPGASonaliNo ratings yet
- SMPC NotesDocument98 pagesSMPC NotesHarsha Anantwar100% (1)
- Braking of Electric Motors: Need..... ?Document8 pagesBraking of Electric Motors: Need..... ?Ramesh VeerNo ratings yet
- Modeling and Simulation of Reluctance Motor Using Digital ComputerDocument5 pagesModeling and Simulation of Reluctance Motor Using Digital ComputerroyourboatNo ratings yet
- Damping Hibrid Stepper MotorDocument8 pagesDamping Hibrid Stepper MotorMake_PicNo ratings yet
- Microcontroller Based Constant Speed Low Cost Energy Efficient BLDC Motor Drive Using Proteus VSM SoftwareDocument7 pagesMicrocontroller Based Constant Speed Low Cost Energy Efficient BLDC Motor Drive Using Proteus VSM SoftwaremakroumNo ratings yet
- SVPWM PDFDocument5 pagesSVPWM PDFmauricetappaNo ratings yet
- Can You Find What Is The Type of Motor Used For These Applications?Document17 pagesCan You Find What Is The Type of Motor Used For These Applications?nandhakumarme0% (1)
- Direct Current Motor Electrical Evaluation With Motor Circuit AnalysisDocument6 pagesDirect Current Motor Electrical Evaluation With Motor Circuit AnalysisCarlos VásquezNo ratings yet
- Electrical Power Generation From Shock AbsorberDocument1 pageElectrical Power Generation From Shock AbsorberThirumal Valavan100% (1)
- Brushless DC MotorDocument6 pagesBrushless DC Motorpsksiva13No ratings yet
- Servo Motor Control AtmegaDocument6 pagesServo Motor Control AtmegaAlan MontalvoNo ratings yet
- Unit-3 Dual - Converter Fed DC Motor Three Phase and Single Phase FEDDocument15 pagesUnit-3 Dual - Converter Fed DC Motor Three Phase and Single Phase FEDHarish ChandraNo ratings yet
- How To Drive DC Motors With Smart Power IcsDocument14 pagesHow To Drive DC Motors With Smart Power IcsGoran ŽivkovićNo ratings yet
- Vsi Csi With Various LoadsDocument56 pagesVsi Csi With Various LoadsDeependra RastogiNo ratings yet
- TP 1800 DC-DC Converter For Hybrid Electric Vehicle and EV ArrowTimesDocument7 pagesTP 1800 DC-DC Converter For Hybrid Electric Vehicle and EV ArrowTimespapipapii100% (1)
- Dynamic Simulation of A Three-Phase Induction Motor Using MATLAB SimulinkDocument6 pagesDynamic Simulation of A Three-Phase Induction Motor Using MATLAB SimulinkRadu BabauNo ratings yet
- My SVPWMprojectDocument68 pagesMy SVPWMprojectHari Reddy100% (1)
- EE2403 Special Electrical MachinesDocument19 pagesEE2403 Special Electrical MachinesvasanthavananNo ratings yet
- Design of A Synchronous Reluctance DriveDocument9 pagesDesign of A Synchronous Reluctance DriveroyourboatNo ratings yet
- 060 Actuators For RobotsDocument69 pages060 Actuators For RobotsMohamad YazidNo ratings yet
- Advanced Speed Control Techniques of Brushless DC MotorDocument17 pagesAdvanced Speed Control Techniques of Brushless DC Motorsrinupid100% (1)
- Me 2209 Electrical Engineering Lab Manua EitlDocument45 pagesMe 2209 Electrical Engineering Lab Manua EitlRagunathan NarayananNo ratings yet
- Pic16f72 3 Phase Motor ControlDocument18 pagesPic16f72 3 Phase Motor ControlMatias BerriosNo ratings yet
- BDocument46 pagesBemmanueel2No ratings yet
- Variable Frequency DriveDocument12 pagesVariable Frequency Drive-Danielle DimitrovaNo ratings yet
- Contact Person & Details Persis - 080 4104 1294 / Saranya - 080 4104 1272 Applicant ID (Unique To You) 1091078Document1 pageContact Person & Details Persis - 080 4104 1294 / Saranya - 080 4104 1272 Applicant ID (Unique To You) 1091078althaf hussainNo ratings yet
- Fractions and Decimals: NtroductionDocument28 pagesFractions and Decimals: Ntroductionanil.gelra5140No ratings yet
- Essential Reasoning For Bank & SSCDocument35 pagesEssential Reasoning For Bank & SSCalthaf hussainNo ratings yet
- Data InterpretationDocument12 pagesData Interpretationalthaf hussainNo ratings yet
- Surface Mount Technology 0701Document17 pagesSurface Mount Technology 0701althaf hussainNo ratings yet
- Sensors TechnologyDocument12 pagesSensors Technologyalthaf hussainNo ratings yet
- Load Power Control by Using SCRDocument40 pagesLoad Power Control by Using SCRalthaf hussainNo ratings yet
- Comparison - Cooper-Notifier-Edwards-morlayDocument1 pageComparison - Cooper-Notifier-Edwards-morlayaryan sharma100% (1)
- User Manual (GZF DW Vi)Document30 pagesUser Manual (GZF DW Vi)Luc Vu TienNo ratings yet
- Single 12V Input Supply Dual Regulator - Synchronous Rectified Buck PWM and Linear Power Controller FeaturesDocument18 pagesSingle 12V Input Supply Dual Regulator - Synchronous Rectified Buck PWM and Linear Power Controller FeaturesJuan Carlos ChavezNo ratings yet
- UNIT 4 MultimediaDocument50 pagesUNIT 4 MultimediaSaranya KalpanaNo ratings yet
- SX44Document4 pagesSX44Mk MakyNo ratings yet
- Features General Description: Data Sheet PT8A977B/978B/978BL 5-Function Remote ControllerDocument11 pagesFeatures General Description: Data Sheet PT8A977B/978B/978BL 5-Function Remote ControllerKouka WafaNo ratings yet
- FORMULA LIST First & Second PHYSICS Qasim SBDocument17 pagesFORMULA LIST First & Second PHYSICS Qasim SBzain aliNo ratings yet
- Magnetic Particle Equipment Selection GuideDocument16 pagesMagnetic Particle Equipment Selection GuideWellington S. FrançaNo ratings yet
- PreampswithspecanalyzersDocument2 pagesPreampswithspecanalyzersData KiswaraNo ratings yet
- 6 Chapter 5Document34 pages6 Chapter 5Kahina ZitouniNo ratings yet
- No-Polarity 2-Wire Proximity Sensor With A 30-mm Sensing DistanceDocument8 pagesNo-Polarity 2-Wire Proximity Sensor With A 30-mm Sensing DistanceBlAdE 12No ratings yet
- Kit 17. LM386 Low Voltage Audio Amplifier: Circuit DescriptionDocument2 pagesKit 17. LM386 Low Voltage Audio Amplifier: Circuit Descriptionszolid79No ratings yet
- Gpi Learn Plus Power T RNDocument52 pagesGpi Learn Plus Power T RNJayachandar Ayyavoo0% (1)
- Philips Chasis 27B800 7562Document58 pagesPhilips Chasis 27B800 7562Luis RugNo ratings yet
- Bd9g341aefj eDocument30 pagesBd9g341aefj eEng:ehab AlmkhlafiNo ratings yet
- LM4558Document3 pagesLM4558Galang Super'Henecia JuniorNo ratings yet
- Amplificador Motorola Ble75shDocument7 pagesAmplificador Motorola Ble75shEdwin Jhon Campomanez AlcamariNo ratings yet
- Alram 411Document2 pagesAlram 411Imran AshrafNo ratings yet
- Guia de Instalacion Panel 1057 1058Document108 pagesGuia de Instalacion Panel 1057 1058Amy ThompsonNo ratings yet
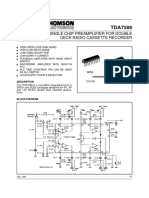
- TDA7286 Single Chip Preamplifier For Double Deck Radio CasseDocument6 pagesTDA7286 Single Chip Preamplifier For Double Deck Radio CasseDunatoMNo ratings yet
- Precision Rectifier CircuitsDocument13 pagesPrecision Rectifier CircuitsWaqas PervaizNo ratings yet
- Ultrasonic Transducer Driver and RecieverDocument2 pagesUltrasonic Transducer Driver and RecieverkumargpalaniNo ratings yet
- Modern Electronic Communication (PDFDrive - Com) Oscillator Question Chapter1Document6 pagesModern Electronic Communication (PDFDrive - Com) Oscillator Question Chapter1jeanne pauline cruz0% (1)
- Eca Labmanual MultisimDocument57 pagesEca Labmanual Multisimvinodh123No ratings yet