You might also like
- Robust Yaw Stability Controller Design and Hardware-In-The-Loop Testing For A Road VehicleDocument18 pagesRobust Yaw Stability Controller Design and Hardware-In-The-Loop Testing For A Road VehicleBejai Alexander MathewNo ratings yet
- Comparison of Feedback Control TechniquesDocument12 pagesComparison of Feedback Control TechniquesKunheechoNo ratings yet
- Nonlinear Model Predictive Extended Eco-Cruise Control For Battery Electric VehiclesDocument6 pagesNonlinear Model Predictive Extended Eco-Cruise Control For Battery Electric VehiclesasadjadiNo ratings yet
- Track Maneuvering Using PID Control For Self-Driving CarsDocument11 pagesTrack Maneuvering Using PID Control For Self-Driving CarsAmogh RNo ratings yet
- Development of Semi-Active Road-Friendly Truck SuspensionsDocument10 pagesDevelopment of Semi-Active Road-Friendly Truck SuspensionsLe ThanhNo ratings yet
- Torque Vectoring For Electric Vehicles With Individually Controlled Motors: State-of-the-Art and Future DevelopmentsDocument12 pagesTorque Vectoring For Electric Vehicles With Individually Controlled Motors: State-of-the-Art and Future DevelopmentseldincelebicNo ratings yet
- Optimized Robust Cruise Control System For An Electric VehicleDocument9 pagesOptimized Robust Cruise Control System For An Electric VehicleMuhammad Aseer KhanNo ratings yet
- Underwater ROV Control SystemDocument11 pagesUnderwater ROV Control SystemIain McCulloch100% (1)
- 11 Chapter 02 PDFDocument28 pages11 Chapter 02 PDFjoel perieraNo ratings yet
- Underwater ROV Control SystemDocument20 pagesUnderwater ROV Control SystemPhanNamNo ratings yet
- 1 s2.0 S2666546821000641 MainDocument9 pages1 s2.0 S2666546821000641 MainSidharth MaheshNo ratings yet
- A Sensorless Direct Torque Control Scheme Suitable For Electric VehiclesDocument9 pagesA Sensorless Direct Torque Control Scheme Suitable For Electric VehiclesSidahmed LarbaouiNo ratings yet
- Evaluation of VDCDocument8 pagesEvaluation of VDCsarba_mihaiNo ratings yet
- TCST 2016 2620421Document9 pagesTCST 2016 2620421mohammad ghaderzadehNo ratings yet
- Multiple Model Predictive Control For WindDocument10 pagesMultiple Model Predictive Control For WindrsowmiyaNo ratings yet
- Processes 09 00899Document13 pagesProcesses 09 00899sashika pereraNo ratings yet
- Controlstrategies Automotivesuspension Bookchapter Springer Kashem2017Document14 pagesControlstrategies Automotivesuspension Bookchapter Springer Kashem2017Thanh Phong PhamNo ratings yet
- 1 BC 9Document12 pages1 BC 9Medo AnaNo ratings yet
- Optimum Design of Proportional-Integral Controllers in Grid-Integrated PMSG-based Wind Energy Conversion SystemDocument26 pagesOptimum Design of Proportional-Integral Controllers in Grid-Integrated PMSG-based Wind Energy Conversion SystemPriyanka GuptaNo ratings yet
- 1 s2.0 S0888327017305654 MainDocument10 pages1 s2.0 S0888327017305654 MainchinnavenkateswarluNo ratings yet
- 16-Paper - Lateral Control of Front-Wheel-Steering PDFDocument46 pages16-Paper - Lateral Control of Front-Wheel-Steering PDFSri Harsha DannanaNo ratings yet
- A Universal Suspension Test Rig For ElectrohydraulicDocument12 pagesA Universal Suspension Test Rig For Electrohydraulicyaser yasNo ratings yet
- Sensors 23 01417 v3Document18 pagesSensors 23 01417 v3sajad soleymanzadeNo ratings yet
- Abec - Steer by Wire PDFDocument4 pagesAbec - Steer by Wire PDFKatherine DukeNo ratings yet
- Modeling of Heavy Duty Electrohydraulic ManipulatorDocument10 pagesModeling of Heavy Duty Electrohydraulic Manipulatoraenas984363No ratings yet
- Icves 2015 7396918Document6 pagesIcves 2015 7396918Anupriya GhoshNo ratings yet
- A Critical Review On Traction Control System: Virendra Patel & Rashmi RayDocument6 pagesA Critical Review On Traction Control System: Virendra Patel & Rashmi RayTJPRC PublicationsNo ratings yet
- Modelling and Nonlinear Robust Control of Longitudinal Vehicle Advanced ACC SystemsDocument36 pagesModelling and Nonlinear Robust Control of Longitudinal Vehicle Advanced ACC Systemsdamaya1701No ratings yet
- A Universal Suspension Test Rig For Electrohydraulic Active and Passive Automotive Suspension SystemDocument12 pagesA Universal Suspension Test Rig For Electrohydraulic Active and Passive Automotive Suspension SystemDidik LeoNo ratings yet
- TR Avt 128 02Document40 pagesTR Avt 128 02ElizaMunNo ratings yet
- Optimization Techniques To Enhance The Performance of Induction Motorhannan2017 PDFDocument16 pagesOptimization Techniques To Enhance The Performance of Induction Motorhannan2017 PDFYasir AlameenNo ratings yet
- Genetic Algorithm Optimized PI and Fuzzy Sliding Mode Speed Control For DTC DrivesDocument6 pagesGenetic Algorithm Optimized PI and Fuzzy Sliding Mode Speed Control For DTC DrivesFrancisco Liszt Nunes JuniorNo ratings yet
- 2015IDETC VantsevichGray FinalDocument12 pages2015IDETC VantsevichGray FinalHusain KanchwalaNo ratings yet
- Conventional and Intelligent Controller For Quarter Car Suspension SystemDocument4 pagesConventional and Intelligent Controller For Quarter Car Suspension SystemInternational Jpurnal Of Technical Research And ApplicationsNo ratings yet
- 2015IDETC VantsevichGray FinalDocument12 pages2015IDETC VantsevichGray FinalHusain KanchwalaNo ratings yet
- Predictive Active Steering Control For Autonomous Vehicle SystemsDocument14 pagesPredictive Active Steering Control For Autonomous Vehicle Systemsjiugarte1No ratings yet
- Torque Vectoring Control: July 2018Document8 pagesTorque Vectoring Control: July 2018Santhoshbharathi MECHNo ratings yet
- Driving Modes For Designing The Cornering Response of Fully Electric Vehicles With Multiple MotorsDocument15 pagesDriving Modes For Designing The Cornering Response of Fully Electric Vehicles With Multiple MotorsAndrea FontanaNo ratings yet
- IMP - Automated Lane Change Controller DesignDocument10 pagesIMP - Automated Lane Change Controller Designjohncena3No ratings yet
- Automated Guided Vehicle SystemsDocument11 pagesAutomated Guided Vehicle SystemsAkshay bypNo ratings yet
- Adaptive Robust Vehicle Motion Control For FutureDocument31 pagesAdaptive Robust Vehicle Motion Control For FutureaamirNo ratings yet
- Managing Driving Disturbances in Lateral Vehicle Dynamics Via Adaptive Integrated Chassis ControlDocument12 pagesManaging Driving Disturbances in Lateral Vehicle Dynamics Via Adaptive Integrated Chassis Controlsamsaptak ghoshNo ratings yet
- Robust Yaw Stability Controller Design and Hardware-in-the-Loop Testing For A Road VehicleDocument17 pagesRobust Yaw Stability Controller Design and Hardware-in-the-Loop Testing For A Road Vehiclekishor sahuNo ratings yet
- A Dynamic Trajectory Planning MethodDocument17 pagesA Dynamic Trajectory Planning Methodgo.thanachotstNo ratings yet
- IJSTM17451382214600Document14 pagesIJSTM17451382214600Viraj GaonkarNo ratings yet
- Robust Sensorless Control Against Thermally Degraded Speed Performance in An IMDocument12 pagesRobust Sensorless Control Against Thermally Degraded Speed Performance in An IMu2005044No ratings yet
- Sliding Mode Based Powertrain Control For Efficiency Improvement in Series Hybrid-Electric VehiclesDocument12 pagesSliding Mode Based Powertrain Control For Efficiency Improvement in Series Hybrid-Electric Vehicles시드세흐리아르알리나크비No ratings yet
- Implementation of Sliding Mode Control System For Generator and Grid Sides Control of Wind Energy Conversion SystemDocument18 pagesImplementation of Sliding Mode Control System For Generator and Grid Sides Control of Wind Energy Conversion Systemhamza gaNo ratings yet
- Research Article: Intelligent Torque Vectoring Approach For Electric Vehicles With Per-Wheel MotorsDocument15 pagesResearch Article: Intelligent Torque Vectoring Approach For Electric Vehicles With Per-Wheel MotorsSanthoshbharathi MECHNo ratings yet
- Vehicle Active SuspensionDocument9 pagesVehicle Active SuspensionVivekDhameliya100% (1)
- Vehicle Longitudinal Motion Modeling For Nonlinear ControlDocument31 pagesVehicle Longitudinal Motion Modeling For Nonlinear ControlPalaniappan PandianNo ratings yet
- Applied Sciences: Nonlinear Control Design of A Half-Car Model Using Feedback Linearization and An LQR ControllerDocument17 pagesApplied Sciences: Nonlinear Control Design of A Half-Car Model Using Feedback Linearization and An LQR ControllerAntônio Luiz MaiaNo ratings yet
- Plug-In Hybrid Electric Vehicle Control Strategy Parameter OptimizationDocument14 pagesPlug-In Hybrid Electric Vehicle Control Strategy Parameter OptimizationPrateesh RajNo ratings yet
- Power Management Strategy For Parallel Hybrid Electric VehiclesDocument6 pagesPower Management Strategy For Parallel Hybrid Electric VehiclesGaurav DeshmukhNo ratings yet
- Ieee TVT 2007 BenbouzidDocument10 pagesIeee TVT 2007 Benbouzidbellali badreNo ratings yet
- Modi Ed Power Rate Sliding Mode Control For Robot Manipulator Based On Particle Swarm OptimizationDocument13 pagesModi Ed Power Rate Sliding Mode Control For Robot Manipulator Based On Particle Swarm OptimizationIAES International Journal of Robotics and AutomationNo ratings yet
- Integrated Longitudinal and Lateral Networked ContDocument25 pagesIntegrated Longitudinal and Lateral Networked ContJasNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Voltage Stability MCQ QuestionsDocument3 pagesVoltage Stability MCQ QuestionsJatin YadavNo ratings yet
- Ob Case4Document3 pagesOb Case4Jatin YadavNo ratings yet
- PrepInsta Infosys 28th Sep Slot Analysis, Questions and AnswersDocument62 pagesPrepInsta Infosys 28th Sep Slot Analysis, Questions and AnswersJatin YadavNo ratings yet
- Apeps 17BEE122 EXP-1: Simulation and Analysis of Three Phase Active Front End Converter.Document3 pagesApeps 17BEE122 EXP-1: Simulation and Analysis of Three Phase Active Front End Converter.Jatin YadavNo ratings yet
- PrepInsta Infosys 28th Sep Slot Analysis, Questions and AnswersDocument62 pagesPrepInsta Infosys 28th Sep Slot Analysis, Questions and AnswersJatin YadavNo ratings yet
- Cooling of TransformersDocument15 pagesCooling of TransformersJatin YadavNo ratings yet
- TMS320LF2407 IntroductionDocument43 pagesTMS320LF2407 IntroductionJatin Yadav100% (2)
- Surviving Plant World's Hard Times: Organization CultureDocument2 pagesSurviving Plant World's Hard Times: Organization CultureJatin YadavNo ratings yet
- Reference Material For EXP - 1Document26 pagesReference Material For EXP - 1Jatin YadavNo ratings yet
- Design Steps of LV HV WindingDocument2 pagesDesign Steps of LV HV WindingJatin Yadav100% (2)
- Chapter 17 - 887-919pDocument39 pagesChapter 17 - 887-919pJatin YadavNo ratings yet
- Battery Management Systems For Electric Vehicles: Bachelor of TechnologyDocument25 pagesBattery Management Systems For Electric Vehicles: Bachelor of TechnologyJatin YadavNo ratings yet
- Bandra Worli Sea Link (BWSL)Document24 pagesBandra Worli Sea Link (BWSL)Akshata Patil ParvatikarNo ratings yet
- c6 The Grey HavensDocument12 pagesc6 The Grey HavensSamBaNo ratings yet
- 031 CPL Mass and BalanceDocument4 pages031 CPL Mass and BalancearathanasiadisNo ratings yet
- Marine Archaeology in IndiaDocument14 pagesMarine Archaeology in IndiaPriya chauhanNo ratings yet
- 95x7 Arduino LED Matrix With 74HC595 and 74LS164 Common Column CathodeDocument1 page95x7 Arduino LED Matrix With 74HC595 and 74LS164 Common Column CathodevinNo ratings yet
- Unit 6 Class Video WorksheetDocument2 pagesUnit 6 Class Video WorksheetAdolfo TefelNo ratings yet
- (MAXXUM 110) - TRACTOR - GARU - TIER 3 (11 - 09-12 - 13) (04) - FRONT AXLE & STEERING Case Agriculture PDFDocument6 pages(MAXXUM 110) - TRACTOR - GARU - TIER 3 (11 - 09-12 - 13) (04) - FRONT AXLE & STEERING Case Agriculture PDFrodrigoNo ratings yet
- Academic EssayDocument16 pagesAcademic EssayΚατερίνα ΚαρράNo ratings yet
- Masterfinish 202 SdsDocument10 pagesMasterfinish 202 SdsazerNo ratings yet
- Republic of The Philippines: Draft Final ReportDocument359 pagesRepublic of The Philippines: Draft Final ReportJosephine ArguellesNo ratings yet
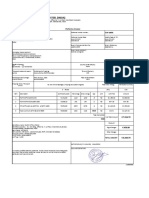
- Rajdev Steel (India) : Performa InvoiceDocument1 pageRajdev Steel (India) : Performa InvoiceHsalmani1991No ratings yet
- Road Stud Product Details: Description Size Installation Stud Type Performance Class Road Trial Performance Road StudDocument1 pageRoad Stud Product Details: Description Size Installation Stud Type Performance Class Road Trial Performance Road StudShams KhattakNo ratings yet
- Manufacturer Model: David Beckham - My Brum Brum CarsDocument4 pagesManufacturer Model: David Beckham - My Brum Brum CarsSheyLa BalasanNo ratings yet
- Elon Musk ResumeDocument1 pageElon Musk ResumeMuhammad Khatammi AzharNo ratings yet
- Catalogo de Pecas Manipulador Telescópico Caterpillar TL-642Document344 pagesCatalogo de Pecas Manipulador Telescópico Caterpillar TL-642angel richard silvestre suazo100% (2)
- C6000 Om en 12Document74 pagesC6000 Om en 12mayur.nilkamalmheNo ratings yet
- Caribbean Examination Council (CXC) Caribbean Secondary Education Certificate (Csec) School - Based Assessment (Sba) MathematicsDocument18 pagesCaribbean Examination Council (CXC) Caribbean Secondary Education Certificate (Csec) School - Based Assessment (Sba) MathematicsSchool is funNo ratings yet
- Ivanova 2020 Environ. Res. Lett. 15 093001Document20 pagesIvanova 2020 Environ. Res. Lett. 15 093001MariandreNo ratings yet
- CUNA Stryker FL19Document64 pagesCUNA Stryker FL19lucas beckerNo ratings yet
- Tredz Returns Form A4 v28b RB WebDocument1 pageTredz Returns Form A4 v28b RB WebJonathan LaneNo ratings yet
- Means of Transport Vocabulary Esl Word Search Puzzle Worksheet For KidsDocument2 pagesMeans of Transport Vocabulary Esl Word Search Puzzle Worksheet For KidsEsin Erdoğan100% (1)
- SACAA Eagle Air Student Information BrochureDocument23 pagesSACAA Eagle Air Student Information BrochureAnurag GuptaNo ratings yet
- 8042 Rev5Document269 pages8042 Rev5Хелфор УкраинаNo ratings yet
- Jopet Dela Cruz, Et 158 M1Document6 pagesJopet Dela Cruz, Et 158 M1Romnick Elgamo GalantoNo ratings yet
- Colombia Imp Detention DemurrageDocument1 pageColombia Imp Detention DemurrageAlvaro ValenciaNo ratings yet
- Bridge Construction Technology - BridgeTechDocument25 pagesBridge Construction Technology - BridgeTechShambhu SahNo ratings yet
- 2019 Commander Series Parts Manual PN - 37355 - FDPB - Rev - 1Document212 pages2019 Commander Series Parts Manual PN - 37355 - FDPB - Rev - 1Tiago FreireNo ratings yet
- Parts Manual PC1100LC 6 S N 10001 UpDocument746 pagesParts Manual PC1100LC 6 S N 10001 UpDavid InojosaNo ratings yet
- Y2023. Holiday - Work - Schedule - Holy Week. 23.03.23 Tin - For Printing Purpose - 1679967133Document2 pagesY2023. Holiday - Work - Schedule - Holy Week. 23.03.23 Tin - For Printing Purpose - 1679967133Tintin EspulgarNo ratings yet
- 2019 Liste Des Vehicules / Pays List of Vehicles / CountriesDocument6 pages2019 Liste Des Vehicules / Pays List of Vehicles / Countrieskevin lassNo ratings yet