You might also like
- AI Teams PluginsDocument1 pageAI Teams PluginsMatin TamásNo ratings yet
- RET670 Test Report DifferentialDocument3 pagesRET670 Test Report Differentialzaheer29310% (1)
- Introduction To MaintenanceDocument38 pagesIntroduction To MaintenancemarianaNo ratings yet
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationFrom EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNo ratings yet
- Method Statement For Drainage Pipe SystemDocument15 pagesMethod Statement For Drainage Pipe SystemaNo ratings yet
- Guidelines For Passenger Services at European AirportsDocument120 pagesGuidelines For Passenger Services at European AirportsJPFJ12100% (2)
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
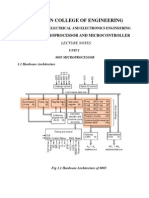
- 8085 MicroprocessorDocument23 pages8085 Microprocessorauromaaroot196% (55)
- Rotating Machineries - Aspects of Operation and Maintenance (PDFDrive)Document110 pagesRotating Machineries - Aspects of Operation and Maintenance (PDFDrive)paulo cesar hernandez mijangosNo ratings yet
- Microprocessor and Micro ControllerDocument118 pagesMicroprocessor and Micro ControllerShiva ShanNo ratings yet
- Microprocessor and Micro Controller Lecture NotesDocument118 pagesMicroprocessor and Micro Controller Lecture NotesSivanesh SK50% (2)
- MPMC NotesDocument301 pagesMPMC NotesVarinder KumarNo ratings yet
- 8085 Architecture: Control UnitDocument10 pages8085 Architecture: Control UnitsweetmemoriesneverdiNo ratings yet
- Unit I PDFDocument25 pagesUnit I PDFSomnath2014No ratings yet
- 8085 Microprocessor Unit 1Document13 pages8085 Microprocessor Unit 1Sajid Akram100% (1)
- Syllabus: 8085 ArchitectureDocument25 pagesSyllabus: 8085 Architecturetamilvendhan87No ratings yet
- 8085 Features, Signal DescriptionDocument13 pages8085 Features, Signal DescriptionRakesh Kumar DNo ratings yet
- Microprocessors and Microcontrollers Answer KeyDocument14 pagesMicroprocessors and Microcontrollers Answer KeyselvaNo ratings yet
- Microprocessor - SGDocument15 pagesMicroprocessor - SGSugata Ghosh0% (1)
- Programming 8085 Microprocessor ArchitectureDocument34 pagesProgramming 8085 Microprocessor ArchitectureAbhinandan JainNo ratings yet
- Unit Ii 8085 Micro Processor 8085 Architecture:: ME 6702 Mechatronics Mechanical Engineering 2019-20Document26 pagesUnit Ii 8085 Micro Processor 8085 Architecture:: ME 6702 Mechatronics Mechanical Engineering 2019-20GopinathNo ratings yet
- Computer ArchitectureDocument46 pagesComputer ArchitectureSunilAjmeeraNo ratings yet
- Microprocessor 8-bit TitleDocument55 pagesMicroprocessor 8-bit TitleAASTHA KIETNo ratings yet
- MPA UNIT 1 and 2Document48 pagesMPA UNIT 1 and 2Shiva Krishna KamjulaNo ratings yet
- MCT Unit 2Document26 pagesMCT Unit 2Aravind RajNo ratings yet
- 8085 MicroprocessorDocument38 pages8085 MicroprocessorPrateek PandeyNo ratings yet
- 8085 MaterialDocument12 pages8085 MaterialsameerNo ratings yet
- Presentation 1Document23 pagesPresentation 1khushalee.chavadaNo ratings yet
- 8085 MicroprocessorDocument25 pages8085 Microprocessorprofessor2062No ratings yet
- Microprocessor 8085Document25 pagesMicroprocessor 8085hetal_limbaniNo ratings yet
- System Programing Exam 3Document6 pagesSystem Programing Exam 3abNo ratings yet
- 8085 ArchitectureDocument38 pages8085 ArchitectureReethu ParavadaNo ratings yet
- MPC 2Document29 pagesMPC 2rohit sharmaNo ratings yet
- Ee8551 8085 NotesDocument31 pagesEe8551 8085 NotesKUMARANSCRNo ratings yet
- Programming With 8085 MicroprocessorDocument33 pagesProgramming With 8085 MicroprocessorBlackk SpydoNo ratings yet
- Architecture Diagram of 8085 MicroprocessorDocument4 pagesArchitecture Diagram of 8085 MicroprocessorbhatiaharryjassiNo ratings yet
- MPMC Unit-1Document27 pagesMPMC Unit-1downloadscribdpdfNo ratings yet
- Notes Unit 1Document25 pagesNotes Unit 1Ashish YadavNo ratings yet
- 8086 Pin Diagram Here Is The Pin Diagram of 8086 MicroprocessorDocument17 pages8086 Pin Diagram Here Is The Pin Diagram of 8086 MicroprocessorRakesh ChaudhuriNo ratings yet
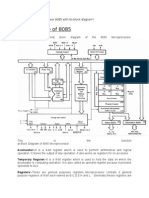
- 8085 Microprocessor - Functional Units: AccumulatorDocument5 pages8085 Microprocessor - Functional Units: AccumulatorDeep KambleNo ratings yet
- 8085 Is Pronounced AsDocument9 pages8085 Is Pronounced AsArbaaz khan786No ratings yet
- Basics of Micro ProcessorDocument27 pagesBasics of Micro ProcessorBibin LeeNo ratings yet
- Unit V Pin Diagram of 8085 MicroprocessorDocument14 pagesUnit V Pin Diagram of 8085 MicroprocessorFLOWERNo ratings yet
- Ii Microprocessor - 8085 ArchitectureDocument6 pagesIi Microprocessor - 8085 ArchitectureYohannis DanielNo ratings yet
- 8-bit Microprocessor 8085 Features and ArchitectureDocument29 pages8-bit Microprocessor 8085 Features and ArchitectureAnif Ilham IsmailNo ratings yet
- 8085 Pin Diagram and ArchitectureDocument8 pages8085 Pin Diagram and ArchitectureSneha SinghNo ratings yet
- Microprocessor & microcontroller introductionDocument20 pagesMicroprocessor & microcontroller introductionjeravi84No ratings yet
- MC8085Document7 pagesMC8085Bhavani BhavanNo ratings yet
- Unit I The 8086 MicroprocessorDocument21 pagesUnit I The 8086 Microprocessor16211a0470100% (1)
- Pin Description and Signals of 8085 MicroprocessorDocument9 pagesPin Description and Signals of 8085 MicroprocessorKripanand JhaNo ratings yet
- Answers of Microprocessor (8085) & Electronics FAQDocument21 pagesAnswers of Microprocessor (8085) & Electronics FAQsoumyadev100% (23)
- MICROPORCESSOR 8085 Lab ManualDocument53 pagesMICROPORCESSOR 8085 Lab ManualAjay PatilNo ratings yet
- 1-Architecture of 8085Document34 pages1-Architecture of 8085Pinki KumariNo ratings yet
- 8085 ArchitectureDocument13 pages8085 ArchitectureShubham BokoliaNo ratings yet
- Block Diagram and Architecture of 8085 MicroprocessorDocument13 pagesBlock Diagram and Architecture of 8085 MicroprocessorShubham SahuNo ratings yet
- Ebooks For FreeDocument24 pagesEbooks For FreeNihar KhuranaNo ratings yet
- Cs2252 - MPMC 16 M With Answers Upto 2Document40 pagesCs2252 - MPMC 16 M With Answers Upto 2archumeenabaluNo ratings yet
- M4 Yash AllabadiDocument6 pagesM4 Yash Allabadidegijon661No ratings yet
- Chapter 4 - Introduction To Intel 8086 MicroprocessorDocument12 pagesChapter 4 - Introduction To Intel 8086 MicroprocessorNaimur EshanNo ratings yet
- C5 - Intro To 8085 - Hardware PDFDocument39 pagesC5 - Intro To 8085 - Hardware PDFsiti hajarNo ratings yet
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
- FM Mid Term Question 1 2018-19Document4 pagesFM Mid Term Question 1 2018-19mech mech1No ratings yet
- Presented By-Name: Vilas Bhagwan Adole. Roll No.: MMS B-01 Specialization: Operations ManagementDocument11 pagesPresented By-Name: Vilas Bhagwan Adole. Roll No.: MMS B-01 Specialization: Operations Managementmech mech1No ratings yet
- Or Mod1 PDFDocument10 pagesOr Mod1 PDFKETHU NIKHIL KUMAR REDDYNo ratings yet
- 45Document4 pages45mech mech1No ratings yet
- S I T C E: Harad Nstitute OF Echnology Ollege OF NgineeringDocument2 pagesS I T C E: Harad Nstitute OF Echnology Ollege OF Ngineeringmech mech1No ratings yet
- Question Bank 6 (Compressible Flow)Document4 pagesQuestion Bank 6 (Compressible Flow)mech mech1No ratings yet
- Unit 1 Introduction: 1.1.introduction To Operations ResearchDocument27 pagesUnit 1 Introduction: 1.1.introduction To Operations Researchmech mech1No ratings yet
- Design Now Competition 2016: Sharad Institute of Technology College of EngineeringDocument4 pagesDesign Now Competition 2016: Sharad Institute of Technology College of Engineeringmech mech1No ratings yet
- ELEVATORDocument1 pageELEVATORmech mech1No ratings yet
- FM Final Formula Part 2Document29 pagesFM Final Formula Part 2mech mech1No ratings yet
- Assignment 2Document2 pagesAssignment 2mech mech1No ratings yet
- MCQ On LPPDocument14 pagesMCQ On LPPmech mech1100% (1)
- Ahmad O. Hasan, Hani Al-Rawashdeh, Ala'a H. Al-Muhtaseb, Ahmad Abu-Jrai, Read Ahmad, Joseph ZeaiterDocument7 pagesAhmad O. Hasan, Hani Al-Rawashdeh, Ala'a H. Al-Muhtaseb, Ahmad Abu-Jrai, Read Ahmad, Joseph Zeaitermech mech1No ratings yet
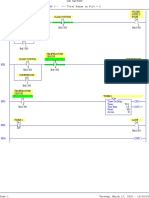
- Switch 1 T4:1 DN Timer 1 O:0 1 Bul.1763 Right Side A+Document1 pageSwitch 1 T4:1 DN Timer 1 O:0 1 Bul.1763 Right Side A+mech mech1No ratings yet
- Webinar Date Register Link: 8 October @11-12pm IST 9 October @11 - 12pm ISTDocument1 pageWebinar Date Register Link: 8 October @11-12pm IST 9 October @11 - 12pm ISTmech mech1No ratings yet
- Ice FactoryDocument1 pageIce Factorymech mech1No ratings yet
- Final Project ReportDocument25 pagesFinal Project Reportmech mech1No ratings yet
- Ladder For Pilot Lamp PDFDocument1 pageLadder For Pilot Lamp PDFmech mech1No ratings yet
- Question Paper ProblemDocument10 pagesQuestion Paper Problemmech mech1No ratings yet
- STAMPDocument1 pageSTAMPmech mech1No ratings yet
- Domestic Washing MachineDocument1 pageDomestic Washing Machinemech mech1No ratings yet
- Experiment Title: Objective:: Server-Side ValidationDocument2 pagesExperiment Title: Objective:: Server-Side Validationmech mech1No ratings yet
- Mechatronics MCQDocument35 pagesMechatronics MCQmech mech189% (19)
- Asitosh 23 Final SeminarDocument18 pagesAsitosh 23 Final Seminarmech mech1No ratings yet
- MechanicsDocument5 pagesMechanicsmech mech1No ratings yet
- FormulaeDocument6 pagesFormulaemech mech1No ratings yet
- Signal Conditioning: Digital Circuits, Microprocessor& MicrocontrollerDocument1 pageSignal Conditioning: Digital Circuits, Microprocessor& Microcontrollermech mech1No ratings yet
- Class Test Model Answer - Diesel Engine Processes & EfficienciesDocument7 pagesClass Test Model Answer - Diesel Engine Processes & Efficienciesmech mech1No ratings yet
- Draft SemestralWorK Aircraft2Document7 pagesDraft SemestralWorK Aircraft2Filip SkultetyNo ratings yet
- Design ManagementDocument3 pagesDesign ManagementGlay xxNo ratings yet
- Curriculum Vitae: Personal InformationDocument2 pagesCurriculum Vitae: Personal InformationAnonymous 2HxqQVNo ratings yet
- To Study About Various Types of Mode ofDocument20 pagesTo Study About Various Types of Mode ofVikas AgrawalNo ratings yet
- Koessler Francis1 EDocument36 pagesKoessler Francis1 Eklcy1987No ratings yet
- Sun Secure Global Desktop Software Relaease NotesDocument57 pagesSun Secure Global Desktop Software Relaease Notesfplinux1No ratings yet
- Cad BookDocument86 pagesCad BookGopi RaguNo ratings yet
- Hyperion Battery Charger User's ManualDocument19 pagesHyperion Battery Charger User's ManualcaohuynhtaiNo ratings yet
- VAV Selection GuidanceDocument3 pagesVAV Selection GuidanceArumugam MurugesanNo ratings yet
- Pid Loop Simulator: ProcessDocument10 pagesPid Loop Simulator: ProcessBenjamin FonsecaNo ratings yet
- Microprocessor & Assembly Language Lab ManualDocument49 pagesMicroprocessor & Assembly Language Lab ManualMAHMOUD CERAYNo ratings yet
- 3 - SQUARE D Model 6 Motor Control Center Profibus DPDocument4 pages3 - SQUARE D Model 6 Motor Control Center Profibus DPSalvatierra Rojas MoisesNo ratings yet
- AWS Solution Architect-Associate (AWSSA-C002) : IntroductionDocument2 pagesAWS Solution Architect-Associate (AWSSA-C002) : IntroductionIsmail SayyedNo ratings yet
- Cps Signal Generator - InoDocument4 pagesCps Signal Generator - InoAlainbravopaezNo ratings yet
- Hti Biochem Fc-200: Quality Products For Healthcare ProfessionalsDocument2 pagesHti Biochem Fc-200: Quality Products For Healthcare ProfessionalsTrình BiomedicNo ratings yet
- Arco en C Siemens Polymobil 3 MS EngDocument34 pagesArco en C Siemens Polymobil 3 MS EngAzucena RivasNo ratings yet
- Business Model of Cork'dDocument2 pagesBusiness Model of Cork'dPritish EkkaNo ratings yet
- Hitachi - AssignmentDocument6 pagesHitachi - AssignmentPraveena IvanaNo ratings yet
- Unit-4 - KOE062 Embededded System MaterialsDocument38 pagesUnit-4 - KOE062 Embededded System MaterialsRishabh PrasadNo ratings yet
- Explanation About Photo CollageDocument2 pagesExplanation About Photo CollagePham Duc HienNo ratings yet
- SANTRO Hatchback BrochureDocument10 pagesSANTRO Hatchback Brochureronak chandranNo ratings yet
- Vas 5052 Vehicle Diagnostic Tool ManualDocument32 pagesVas 5052 Vehicle Diagnostic Tool Manualautool100% (2)
- Karthik ResumeDocument3 pagesKarthik Resumekarthik_04652No ratings yet
- A 5.8-GHz Phased Array FMCW Doppler Radar Front End For Object Localization and Movement Tracking in 65-Nm CMOSDocument15 pagesA 5.8-GHz Phased Array FMCW Doppler Radar Front End For Object Localization and Movement Tracking in 65-Nm CMOSChandra KanthNo ratings yet
- Firstnaukri End To End Campus Hiring Assistance - LT Technology ServicesDocument30 pagesFirstnaukri End To End Campus Hiring Assistance - LT Technology ServicestestmailjobNo ratings yet