You might also like
- User Modeling in UCSDDocument8 pagesUser Modeling in UCSDPauline Bogador MayordomoNo ratings yet
- Assignment 1 Human Computer Interaction INFO 3307Document4 pagesAssignment 1 Human Computer Interaction INFO 3307ranti khairunnisaNo ratings yet
- Expert Systems and AI: ExampleDocument6 pagesExpert Systems and AI: ExampleZarana KananiNo ratings yet
- 10 1109icbaps 2015 7292220 PDFDocument6 pages10 1109icbaps 2015 7292220 PDFnike 1998No ratings yet
- Human Problem-Solving ModelDocument3 pagesHuman Problem-Solving ModelEman ChanNo ratings yet
- COMP3900 Cheat SheetDocument2 pagesCOMP3900 Cheat SheetIanMonica100% (1)
- Embedded Systems App Areas: Wearables, Healthcare, Sensing, RecognitionDocument8 pagesEmbedded Systems App Areas: Wearables, Healthcare, Sensing, RecognitionSurr LaLaNo ratings yet
- AI Systems ExplainedDocument38 pagesAI Systems ExplainedramalingasaravananNo ratings yet
- Principles of Artificial IntelligenceDocument15 pagesPrinciples of Artificial Intelligencemohasinmoosi777No ratings yet
- Intelligent Agent: A Variety of DefinitionsDocument6 pagesIntelligent Agent: A Variety of DefinitionsNaveen KumarNo ratings yet
- Artificial Intelligence Com 423 HND IiDocument8 pagesArtificial Intelligence Com 423 HND IiAugustine OgarNo ratings yet
- Verifying Autonomous SystemsDocument10 pagesVerifying Autonomous SystemsLouie HelmNo ratings yet
- 1 Applications of Intelligent Agents: Queen Mary & Westfield College University of LondonDocument25 pages1 Applications of Intelligent Agents: Queen Mary & Westfield College University of LondonrajashekarpulaNo ratings yet
- Dissertation Informatik UmfangDocument7 pagesDissertation Informatik UmfangWebsiteThatWillWriteAPaperForYouOmaha100% (1)
- I - Introduction To ErgoDocument39 pagesI - Introduction To ErgoNeknek Diwa De GuzmanNo ratings yet
- Chapter 13Document6 pagesChapter 13Nageshwaran SankaranNo ratings yet
- Chapter 2Document29 pagesChapter 2oromafi tubeNo ratings yet
- Defining Intelligent ControlDocument31 pagesDefining Intelligent ControlJULIO ERNESTO CASTRO RICONo ratings yet
- Robotics and Planning: Class: 4 Year/ Branch: AIDocument53 pagesRobotics and Planning: Class: 4 Year/ Branch: AIأحمد كرارNo ratings yet
- Affect and Machine Design: Lessons For The Development of Autonomous MachinesDocument7 pagesAffect and Machine Design: Lessons For The Development of Autonomous MachinesSaravanan MathiNo ratings yet
- Study On Ergonomic Application For IT IndustryDocument17 pagesStudy On Ergonomic Application For IT IndustrySubrat SinghNo ratings yet
- Lecture 8Document20 pagesLecture 8Muhammad AltamashNo ratings yet
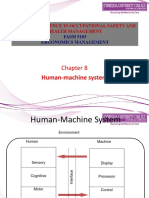
- MOSH-Chapter 8 (Human Machine System)Document20 pagesMOSH-Chapter 8 (Human Machine System)siti zubaidahNo ratings yet
- Assignment ON Operation ResearchDocument15 pagesAssignment ON Operation ResearchHimansu Sekhar BarikNo ratings yet
- Ingreso, Jorizh T. 1-1 BsitgenDocument7 pagesIngreso, Jorizh T. 1-1 BsitgenJoris Ingreso100% (1)
- Unit 1Document12 pagesUnit 1ShyamNo ratings yet
- Gaze, Posture and Gesture Recognition To Minimize Focus Shifts For Intelligent Operating Rooms in A Collaborative Support SystemDocument20 pagesGaze, Posture and Gesture Recognition To Minimize Focus Shifts For Intelligent Operating Rooms in A Collaborative Support SystemJasi WachsNo ratings yet
- Unit-2 Week-5Document22 pagesUnit-2 Week-5vomyNo ratings yet
- Human Factors DesignDocument18 pagesHuman Factors DesignMrBlythNo ratings yet
- Current Research in Robotics and Automation: An Intelligent Grasping SystemDocument3 pagesCurrent Research in Robotics and Automation: An Intelligent Grasping SystemArun KumarNo ratings yet
- HCI Ch-4 Interaction LastsDocument65 pagesHCI Ch-4 Interaction LastsAschenakiNo ratings yet
- Utility Based SystemsDocument10 pagesUtility Based SystemsVinay YadavNo ratings yet
- 1.1 The Vision of Multiagent SystemsDocument14 pages1.1 The Vision of Multiagent SystemsLina ZapataNo ratings yet
- Biomechatronic HandDocument17 pagesBiomechatronic HandZubear Mustafa100% (1)
- Active PerceptionDocument35 pagesActive PerceptionShirin BudhwaniNo ratings yet
- Aldea Activity 8Document2 pagesAldea Activity 8Kiel TheodoreNo ratings yet
- Behavior Coordination MechanismsDocument49 pagesBehavior Coordination MechanismsAulia®No ratings yet
- ErgonomicsDocument7 pagesErgonomicsKhushi SalgaonkarNo ratings yet
- Context-Aware Computing Systems Simplify Tasks Through ModelsDocument4 pagesContext-Aware Computing Systems Simplify Tasks Through ModelsDamir DivkovicNo ratings yet
- There Are Several Types of AIDocument8 pagesThere Are Several Types of AIHansraj KumarNo ratings yet
- Mind MapDocument18 pagesMind MapMohammed ZaidNo ratings yet
- Notes On Review Questions For Chapter 1Document4 pagesNotes On Review Questions For Chapter 1Jenny VarelaNo ratings yet
- Appied Ergonomics NotesDocument36 pagesAppied Ergonomics NotesCharles Ondieki100% (1)
- Management Information SystemDocument13 pagesManagement Information SystemSaumya SaumyaNo ratings yet
- AI Unit 1Document50 pagesAI Unit 1Lavanya H MNo ratings yet
- Human Activity Recognition SynopsisDocument4 pagesHuman Activity Recognition SynopsisAPS PlacementsNo ratings yet
- Design RulesDocument23 pagesDesign RulesHassnain AbbasNo ratings yet
- Unit - IiDocument5 pagesUnit - IiDeepak BhattNo ratings yet
- Chap3-Agents and KnowledgeDocument21 pagesChap3-Agents and Knowledgejmnogales87senaNo ratings yet
- Seminar Report ON: Ai and Its Intelligent AgentsDocument17 pagesSeminar Report ON: Ai and Its Intelligent AgentsRupesh SharmaNo ratings yet
- Unit 1 Question With Answer2Document9 pagesUnit 1 Question With Answer2Abhishek GoyalNo ratings yet
- Elements of Task Theory AGI 2021Document10 pagesElements of Task Theory AGI 2021thorissonNo ratings yet
- Human Factors and SystemsDocument62 pagesHuman Factors and SystemsKiran KNo ratings yet
- AI KEY - June-2023Document2 pagesAI KEY - June-2023srinivas kanakalaNo ratings yet
- ISM Research StudyDocument26 pagesISM Research StudySonam SharmaNo ratings yet
- Deterministic Syste1Document3 pagesDeterministic Syste1KarlitaGarciaNo ratings yet
- E Torres J Humanoid 2005Document6 pagesE Torres J Humanoid 2005Mauricio Huacho ChecaNo ratings yet
- Human and Machine Intelligence Adaptive Automation 45782Document5 pagesHuman and Machine Intelligence Adaptive Automation 45782Editor IJAERDNo ratings yet
- Human Body RubricDocument2 pagesHuman Body Rubricapi-262892467No ratings yet
- Prosthetic Arm Using Emg Sensor: Project Report OnDocument4 pagesProsthetic Arm Using Emg Sensor: Project Report OnIshwar ChandNo ratings yet
- Artificial Intelligence in Power System: Seminar Synopsis On " "Document4 pagesArtificial Intelligence in Power System: Seminar Synopsis On " "Ishwar ChandNo ratings yet
- Industrial Augmented Reality for ShipyardsDocument31 pagesIndustrial Augmented Reality for ShipyardsIshwar ChandNo ratings yet
- SociologyDocument23 pagesSociologyIshwar ChandNo ratings yet
- Techpaper For Submission PDFDocument5 pagesTechpaper For Submission PDFIshwar ChandNo ratings yet
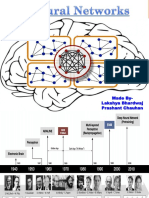
- Made By-Lakshya Bhardwaj Prashant ChauhanDocument26 pagesMade By-Lakshya Bhardwaj Prashant ChauhanIshwar ChandNo ratings yet
- Line FollowerDocument11 pagesLine FollowerIshwar ChandNo ratings yet
- Line FollowerDocument11 pagesLine FollowerIshwar ChandNo ratings yet
- Made By-Lakshya Bhardwaj Prashant ChauhanDocument26 pagesMade By-Lakshya Bhardwaj Prashant ChauhanIshwar ChandNo ratings yet
- Made By-Lakshya Bhardwaj Prashant ChauhanDocument26 pagesMade By-Lakshya Bhardwaj Prashant ChauhanIshwar ChandNo ratings yet
- Jaipur Foot: Challenging ConventionDocument33 pagesJaipur Foot: Challenging ConventionKaustav Roy Choudhury100% (1)
- BioHPP Clinical Research Data PDFDocument63 pagesBioHPP Clinical Research Data PDFStan Mihaela100% (3)
- Safe Surgical Dislocation For Femoral Head.8Document1 pageSafe Surgical Dislocation For Femoral Head.8Shailesh PaiNo ratings yet
- The Art and The Science: Preliminary ProgrammeDocument30 pagesThe Art and The Science: Preliminary ProgrammeYareli SahagunNo ratings yet
- Biosensors and Bioelectronics: Carl Demolder, Alicia Molina, Frank L. Hammond III, Woon-Hong YeoDocument19 pagesBiosensors and Bioelectronics: Carl Demolder, Alicia Molina, Frank L. Hammond III, Woon-Hong YeoYoussef NagatyNo ratings yet
- Grand RevalidaDocument342 pagesGrand RevalidaJoeNo ratings yet
- Effect of Different Framework Materials in Implant-Supported Fixed Mandibular Prostheses: A Finite Element AnalysisDocument8 pagesEffect of Different Framework Materials in Implant-Supported Fixed Mandibular Prostheses: A Finite Element AnalysisNelson BarakatNo ratings yet
- Weareable Robots IndexDocument4 pagesWeareable Robots IndexLucas SuplinoNo ratings yet
- Design Meets DisabilityDocument14 pagesDesign Meets DisabilityAtef Mohsen El-BassionyNo ratings yet
- Classi Cation of Prosthetics Used in Hernia Repair Based On Weight and Biomaterial 2011Document12 pagesClassi Cation of Prosthetics Used in Hernia Repair Based On Weight and Biomaterial 2011JOTACENo ratings yet
- Unit 4 ProsthesisDocument61 pagesUnit 4 ProsthesisMythily VedhagiriNo ratings yet
- PROCEDE DROP ON DEMAND DE SOLIDSCAPE enDocument2 pagesPROCEDE DROP ON DEMAND DE SOLIDSCAPE enSoufianeNo ratings yet
- Grasp Recognition From Myoelectric Signals: Simon Ferguson G Reg DunlopDocument5 pagesGrasp Recognition From Myoelectric Signals: Simon Ferguson G Reg Dunlopwmp8611024213No ratings yet
- Assig 1Document4 pagesAssig 1aabilaNo ratings yet
- Section 320 IPCDocument8 pagesSection 320 IPCAiswarya RajyalakshmiNo ratings yet
- McCracken's Removable Partial ProsthodonticsDocument6 pagesMcCracken's Removable Partial ProsthodonticsDumitru Pop29% (7)
- ME424 201516 Unit 1-1Document41 pagesME424 201516 Unit 1-1saiNo ratings yet
- ProjectsDocument91 pagesProjectsFelipe TorresNo ratings yet
- Reviewing Literature on Denture Insertion and Follow-UpDocument8 pagesReviewing Literature on Denture Insertion and Follow-Upmoondreamerm2No ratings yet
- Below Knee and Through Knee Prosthesis GuideDocument4 pagesBelow Knee and Through Knee Prosthesis GuideClang TejadaNo ratings yet
- Democratizing Commerce:: The Challenge For The 21 CenturyDocument31 pagesDemocratizing Commerce:: The Challenge For The 21 Centuryapi-26169043No ratings yet
- Ocular Prosthesis BhavanDocument58 pagesOcular Prosthesis BhavanDrkvpratheep Pratheep100% (1)
- Phonetics in Complete Denture-3670Document5 pagesPhonetics in Complete Denture-3670Najeeb UllahNo ratings yet
- Knee Assessement FormDocument2 pagesKnee Assessement FormLee Woo GuanNo ratings yet
- Report Bionics - SopDocument8 pagesReport Bionics - SopMahajan AbhishekNo ratings yet
- 2015 Prosthetics Lower Limb Global CatalogDocument352 pages2015 Prosthetics Lower Limb Global CatalogChandan Mahapatra100% (2)
- Revitan Straight Revision Hip System Brochure 06.01360.012!12!2006Document12 pagesRevitan Straight Revision Hip System Brochure 06.01360.012!12!2006Sergiu PlescaNo ratings yet
- Replacement Major Repair FormDocument2 pagesReplacement Major Repair FormAlfionita WikaNo ratings yet
- 9 Giles B3Document37 pages9 Giles B3Jem Rhod CamenseNo ratings yet
- Prevalence of Residual Limb Pain and Symptomatic.3Document8 pagesPrevalence of Residual Limb Pain and Symptomatic.3Deng PanNo ratings yet
- Briefly Perfectly Human: Making an Authentic Life by Getting Real About the EndFrom EverandBriefly Perfectly Human: Making an Authentic Life by Getting Real About the EndNo ratings yet
- Breaking the Habit of Being YourselfFrom EverandBreaking the Habit of Being YourselfRating: 4.5 out of 5 stars4.5/5 (1457)
- The Bridesmaid: The addictive psychological thriller that everyone is talking aboutFrom EverandThe Bridesmaid: The addictive psychological thriller that everyone is talking aboutRating: 4 out of 5 stars4/5 (130)
- Techniques Exercises And Tricks For Memory ImprovementFrom EverandTechniques Exercises And Tricks For Memory ImprovementRating: 4.5 out of 5 stars4.5/5 (40)
- How to Walk into a Room: The Art of Knowing When to Stay and When to Walk AwayFrom EverandHow to Walk into a Room: The Art of Knowing When to Stay and When to Walk AwayRating: 4.5 out of 5 stars4.5/5 (5)
- Neville Goddard Master Course to Manifest Your Desires Into Reality Using The Law of Attraction: Learn the Secret to Overcoming Your Current Problems and Limitations, Attaining Your Goals, and Achieving Health, Wealth, Happiness and Success!From EverandNeville Goddard Master Course to Manifest Your Desires Into Reality Using The Law of Attraction: Learn the Secret to Overcoming Your Current Problems and Limitations, Attaining Your Goals, and Achieving Health, Wealth, Happiness and Success!Rating: 5 out of 5 stars5/5 (284)
- Natural Memory Improvement TechniquesFrom EverandNatural Memory Improvement TechniquesRating: 4.5 out of 5 stars4.5/5 (54)
- The Ultimate Guide To Memory Improvement TechniquesFrom EverandThe Ultimate Guide To Memory Improvement TechniquesRating: 5 out of 5 stars5/5 (34)
- The Obesity Code: Unlocking the Secrets of Weight LossFrom EverandThe Obesity Code: Unlocking the Secrets of Weight LossRating: 4 out of 5 stars4/5 (5)
- How to Talk to Anyone: Learn the Secrets of Good Communication and the Little Tricks for Big Success in RelationshipFrom EverandHow to Talk to Anyone: Learn the Secrets of Good Communication and the Little Tricks for Big Success in RelationshipRating: 4.5 out of 5 stars4.5/5 (1135)
- The Happiest Baby on the Block: The New Way to Calm Crying and Help Your Newborn Baby Sleep LongerFrom EverandThe Happiest Baby on the Block: The New Way to Calm Crying and Help Your Newborn Baby Sleep LongerRating: 4.5 out of 5 stars4.5/5 (58)
- Summary of The 4-Hour Body: An Uncommon Guide to Rapid Fat-Loss, Incredible Sex, and Becoming Superhuman by Timothy FerrissFrom EverandSummary of The 4-Hour Body: An Uncommon Guide to Rapid Fat-Loss, Incredible Sex, and Becoming Superhuman by Timothy FerrissRating: 4.5 out of 5 stars4.5/5 (81)
- No Mud, No Lotus: The Art of Transforming SufferingFrom EverandNo Mud, No Lotus: The Art of Transforming SufferingRating: 5 out of 5 stars5/5 (174)
- Raising Good Humans: A Mindful Guide to Breaking the Cycle of Reactive Parenting and Raising Kind, Confident KidsFrom EverandRaising Good Humans: A Mindful Guide to Breaking the Cycle of Reactive Parenting and Raising Kind, Confident KidsRating: 4.5 out of 5 stars4.5/5 (169)
- Prisoners of Geography: Ten Maps That Explain Everything About the WorldFrom EverandPrisoners of Geography: Ten Maps That Explain Everything About the WorldRating: 4.5 out of 5 stars4.5/5 (1145)
- Summary: How to Be an Adult in Relationships: The Five Keys to Mindful Loving by David Richo: Key Takeaways, Summary & Analysis IncludedFrom EverandSummary: How to Be an Adult in Relationships: The Five Keys to Mindful Loving by David Richo: Key Takeaways, Summary & Analysis IncludedRating: 4 out of 5 stars4/5 (11)
- For Women Only, Revised and Updated Edition: What You Need to Know About the Inner Lives of MenFrom EverandFor Women Only, Revised and Updated Edition: What You Need to Know About the Inner Lives of MenRating: 4.5 out of 5 stars4.5/5 (269)
- Gut: the new and revised Sunday Times bestsellerFrom EverandGut: the new and revised Sunday Times bestsellerRating: 4 out of 5 stars4/5 (392)
- Summary of The Art of Seduction by Robert GreeneFrom EverandSummary of The Art of Seduction by Robert GreeneRating: 4 out of 5 stars4/5 (46)
- Summary: I'm Glad My Mom Died: by Jennette McCurdy: Key Takeaways, Summary & AnalysisFrom EverandSummary: I'm Glad My Mom Died: by Jennette McCurdy: Key Takeaways, Summary & AnalysisRating: 4.5 out of 5 stars4.5/5 (2)
- Sleep Stories for Adults: Overcome Insomnia and Find a Peaceful AwakeningFrom EverandSleep Stories for Adults: Overcome Insomnia and Find a Peaceful AwakeningRating: 4 out of 5 stars4/5 (3)
- Being Mean: A Memoir of Sexual Abuse and SurvivalFrom EverandBeing Mean: A Memoir of Sexual Abuse and SurvivalRating: 4.5 out of 5 stars4.5/5 (55)
- Secure Love: Create a Relationship That Lasts a LifetimeFrom EverandSecure Love: Create a Relationship That Lasts a LifetimeRating: 5 out of 5 stars5/5 (18)
- The House Mate: A gripping psychological thriller you won't be able to put downFrom EverandThe House Mate: A gripping psychological thriller you won't be able to put downRating: 4 out of 5 stars4/5 (126)
- Outlive: The Science and Art of Longevity by Peter Attia: Key Takeaways, Summary & AnalysisFrom EverandOutlive: The Science and Art of Longevity by Peter Attia: Key Takeaways, Summary & AnalysisRating: 4 out of 5 stars4/5 (1)