You might also like
- Musa - Khapayi@nmmu - Ac.za Phillip - Celliers2@nmmu - Ac.zaDocument17 pagesMusa - Khapayi@nmmu - Ac.za Phillip - Celliers2@nmmu - Ac.zavodounnouNo ratings yet
- Numerical Analysis of Cocurrent Conical and CylindDocument9 pagesNumerical Analysis of Cocurrent Conical and CylindvodounnouNo ratings yet
- Size SeparationDocument53 pagesSize SeparationvodounnouNo ratings yet
- American Society of Plant Biologists (ASPB) The Plant CellDocument6 pagesAmerican Society of Plant Biologists (ASPB) The Plant CellvodounnouNo ratings yet
- Technik Plus Conservation Agriculture in AfricaDocument9 pagesTechnik Plus Conservation Agriculture in AfricavodounnouNo ratings yet
- Impact of Ploughing On Soil Seed Bank DyDocument9 pagesImpact of Ploughing On Soil Seed Bank DyvodounnouNo ratings yet
- Impacts of Conservation Agriculture On Soil Structure and Hydraulic Properties of Malawian Agricultural SystemsDocument8 pagesImpacts of Conservation Agriculture On Soil Structure and Hydraulic Properties of Malawian Agricultural SystemsvodounnouNo ratings yet
- The Influence of Implements and Operatio PDFDocument14 pagesThe Influence of Implements and Operatio PDFvodounnouNo ratings yet
- Traction Prediction Using Soil Parameter PDFDocument16 pagesTraction Prediction Using Soil Parameter PDFvodounnouNo ratings yet
- Soil & Tillage Research: SciencedirectDocument8 pagesSoil & Tillage Research: SciencedirectvodounnouNo ratings yet
- Performance Evaluation of Manually Opera PDFDocument5 pagesPerformance Evaluation of Manually Opera PDFvodounnouNo ratings yet
- Soil Compaction and Root Growth: A Review Paul W. Unger and Thomas C. KasparDocument8 pagesSoil Compaction and Root Growth: A Review Paul W. Unger and Thomas C. KasparvodounnouNo ratings yet
- Development and Performance Evaluation o PDFDocument12 pagesDevelopment and Performance Evaluation o PDFvodounnouNo ratings yet
- Design Construction and Testing of An inDocument11 pagesDesign Construction and Testing of An invodounnouNo ratings yet
- The Mechanical Properties of Biomaterials: BIOM9561Document9 pagesThe Mechanical Properties of Biomaterials: BIOM9561vodounnouNo ratings yet
- FT-8101 Engineering Properties of Biomaterials and ApplicationsDocument19 pagesFT-8101 Engineering Properties of Biomaterials and ApplicationsvodounnouNo ratings yet
- Engineering Properties of Tiger Nut Seed PDFDocument3 pagesEngineering Properties of Tiger Nut Seed PDFvodounnouNo ratings yet
- A Classification of Food PropertiesDocument8 pagesA Classification of Food PropertiesvodounnouNo ratings yet
- Philippine National Standard: PNS/PAES 263:2015 (PAES Published 2015) ICS 65.060.50Document30 pagesPhilippine National Standard: PNS/PAES 263:2015 (PAES Published 2015) ICS 65.060.50vodounnouNo ratings yet
- About Mechanical Engineering & Materials Science Graduate ProgramsDocument13 pagesAbout Mechanical Engineering & Materials Science Graduate ProgramsvodounnouNo ratings yet
- Field Evaluation of Tractor Mounted Boom Sprayer: March 2018Document14 pagesField Evaluation of Tractor Mounted Boom Sprayer: March 2018vodounnouNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Physics NotesDocument13 pagesPhysics Noteswaheedlakho100% (2)
- S3 My WoW Live Hot Air Balloons Pupil WorksheetV2Document5 pagesS3 My WoW Live Hot Air Balloons Pupil WorksheetV2Dennis Gabriel WuNo ratings yet
- Hidraulika - Mashuri - Pertemuan 11Document74 pagesHidraulika - Mashuri - Pertemuan 11EllaNo ratings yet
- Low & Medium Voltage Vacuum Contactors: Toshiba Offers Superior FeaturesDocument2 pagesLow & Medium Voltage Vacuum Contactors: Toshiba Offers Superior FeaturesOMEGADNo ratings yet
- Chapter 1.3Document26 pagesChapter 1.3Praneshvar PraneshvarNo ratings yet
- Magnetism SlidesDocument82 pagesMagnetism SlidesBjorn LowNo ratings yet
- AG312 Pin Diode PDFDocument18 pagesAG312 Pin Diode PDFtuwinnerNo ratings yet
- 2020-Physical-Sciences-Grade-11-Vectors, MotionDocument68 pages2020-Physical-Sciences-Grade-11-Vectors, MotionJoyce ChikwaNo ratings yet
- Atkins Technical Journal 04Document164 pagesAtkins Technical Journal 04Hasrina Mohd Ramazi100% (1)
- Chapter 10Document18 pagesChapter 10WiltuzNo ratings yet
- NEMA Vacuum Break Contactors and StartersDocument18 pagesNEMA Vacuum Break Contactors and StartersMoiReyesNo ratings yet
- Unsteady Combustor PhysicsDocument475 pagesUnsteady Combustor Physicsgegelelolo100% (3)
- Flamegard - Flame Retardant Low Smoke (FR-LSH) Industrial CablesDocument1 pageFlamegard - Flame Retardant Low Smoke (FR-LSH) Industrial CablescceNo ratings yet
- IcaDocument6 pagesIcasruthiNo ratings yet
- Modern Physics Type 2 PART 2 of 3 ENGDocument21 pagesModern Physics Type 2 PART 2 of 3 ENGManav AgrawalNo ratings yet
- 12 Class Physics 1-Chapter Sample Paper PDFDocument9 pages12 Class Physics 1-Chapter Sample Paper PDFharshNo ratings yet
- Wahyudi Fachrul Syafra, Purwantono, Hasanuddin Dan Arwizet KDocument10 pagesWahyudi Fachrul Syafra, Purwantono, Hasanuddin Dan Arwizet KB3 EDANNo ratings yet
- BSC Hs Physics Semester I To Vi CbcegsDocument43 pagesBSC Hs Physics Semester I To Vi CbcegsGerald BrightNo ratings yet
- R7 210205 Electromagnetic FieldsDocument2 pagesR7 210205 Electromagnetic FieldssivabharathamurthyNo ratings yet
- DIN-Rail Mount SMPS: SPB SeriesDocument4 pagesDIN-Rail Mount SMPS: SPB SeriesMohamed FahadNo ratings yet
- DLL Q3 Week 4 Day 4Document11 pagesDLL Q3 Week 4 Day 4Cecilia Guevarra DumlaoNo ratings yet
- Wave Assisted Propulsion by Lieutenant General SPC Cory A. HofstadDocument6 pagesWave Assisted Propulsion by Lieutenant General SPC Cory A. HofstadCory Andrew HofstadNo ratings yet
- Bs Motor EngDocument36 pagesBs Motor Engjroyal692974No ratings yet
- EDC Lab Manual EeeDocument106 pagesEDC Lab Manual EeeVishnu Kumar NadarNo ratings yet
- Classf and Inverse ADS PaperDocument11 pagesClassf and Inverse ADS Papergaurav bhargavNo ratings yet
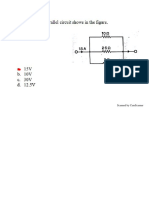
- L LL L: The Vo Tage Across The para e Circuit Shows The FigureDocument50 pagesL LL L: The Vo Tage Across The para e Circuit Shows The Figure4630220No ratings yet
- Experiment No. 4 Study of Various Types of EarthingDocument14 pagesExperiment No. 4 Study of Various Types of EarthingJude JohnNo ratings yet
- Skema Fizik Kertas 2Document8 pagesSkema Fizik Kertas 2hakimNo ratings yet
- Power Transformer Protection Relaying (Overcurrent, Restricted Earth Fault & Differential) - EEPDocument30 pagesPower Transformer Protection Relaying (Overcurrent, Restricted Earth Fault & Differential) - EEPDurgeshkumar RajputNo ratings yet
- Electric Power Transmission System Engineering Analysis and Design - T. Gonen PDFDocument174 pagesElectric Power Transmission System Engineering Analysis and Design - T. Gonen PDFsunny17250% (1)