You might also like
- HSERILibDocument12 pagesHSERILibVivi D ArknessNo ratings yet
- Scheffe Experiments With MixturesDocument18 pagesScheffe Experiments With MixturesChristopher RivasNo ratings yet
- Computational Physics - Fortran Version - Koonin PDFDocument660 pagesComputational Physics - Fortran Version - Koonin PDFJosé Roberto LessaNo ratings yet
- Statistic in Our Daily LifeDocument10 pagesStatistic in Our Daily LifeAnisah Yeobo100% (1)
- DLP Area of A Circle Math 5 Q4Document4 pagesDLP Area of A Circle Math 5 Q4Emz Mzz100% (2)
- Nassim Haramein Answers His CriticsDocument7 pagesNassim Haramein Answers His Criticsr.viola9101No ratings yet
- Nonlinear Least SQ: Queensland 4001, AustraliaDocument17 pagesNonlinear Least SQ: Queensland 4001, AustraliaAbdul AzizNo ratings yet
- Abney McPeek An NGDocument23 pagesAbney McPeek An NGMohammad Imran ShafiNo ratings yet
- Solving Nonlinear Equations From Higher Order Derivations in Linear StagesDocument24 pagesSolving Nonlinear Equations From Higher Order Derivations in Linear StagesAzhar Ali ZafarNo ratings yet
- Inequalities For Symmetric Means: Allison Cuttler, Curtis Greene, and Mark SkanderaDocument8 pagesInequalities For Symmetric Means: Allison Cuttler, Curtis Greene, and Mark SkanderaGeorge KaragiannidisNo ratings yet
- Laplace Equations and The Weak Lefschetz ( (2012)Document21 pagesLaplace Equations and The Weak Lefschetz ( (2012)Matemáticas AsesoriasNo ratings yet
- Chapter 8Document22 pagesChapter 8youyou700No ratings yet
- Multi Qu BitDocument16 pagesMulti Qu BitgejikeijiNo ratings yet
- Joljrnal of Computational PhysicsDocument17 pagesJoljrnal of Computational PhysicsKaustubhNo ratings yet
- A Natural Topology For Upper Semicontinuous Functions and A Baire Category Dual For Convergence in MeasureDocument17 pagesA Natural Topology For Upper Semicontinuous Functions and A Baire Category Dual For Convergence in MeasureKarima AitNo ratings yet
- Algorithms For Solving Nonlinear Systems of EquationsDocument28 pagesAlgorithms For Solving Nonlinear Systems of Equationslvjiaze12100% (1)
- Interpolation With Positive Real Functions OF Several VariablesDocument12 pagesInterpolation With Positive Real Functions OF Several VariablesRohit GandhiNo ratings yet
- Impossibility Theorems For IntegralsDocument13 pagesImpossibility Theorems For IntegralsVigen ChaltikyanNo ratings yet
- 002 Lecture Statistical TheoryDocument7 pages002 Lecture Statistical TheoryAparna SivakumarNo ratings yet
- E (N) Equivariant Normalizing Flows: Equal ContributionDocument12 pagesE (N) Equivariant Normalizing Flows: Equal ContributionAlessio GagliardiNo ratings yet
- Renormalization Group and The Ginzburg-Landau Equation: Mathematical PhysicsDocument16 pagesRenormalization Group and The Ginzburg-Landau Equation: Mathematical PhysicsNikos PapanikolaouNo ratings yet
- Stable Probability Distributions and Their Domains of Attraction: ApproachDocument20 pagesStable Probability Distributions and Their Domains of Attraction: ApproachDibbendu RoyNo ratings yet
- Finite Difference MethodsDocument15 pagesFinite Difference MethodsRami Mahmoud BakrNo ratings yet
- Associated Legendre Functions and Dipole Transition Matrix ElementsDocument16 pagesAssociated Legendre Functions and Dipole Transition Matrix ElementsFrancisco QuiroaNo ratings yet
- Factorization Method and New Potentials With The Oscillator SpectrumDocument4 pagesFactorization Method and New Potentials With The Oscillator SpectrumManuel LopezNo ratings yet
- A Modified Expectation Maximization Algorithm For Penalized Likelihood Estimation in Emission TomorzradhvDocument6 pagesA Modified Expectation Maximization Algorithm For Penalized Likelihood Estimation in Emission TomorzradhvDavid SarrutNo ratings yet
- M Oxley Gelfand TripletDocument25 pagesM Oxley Gelfand TripletAdrián López CrucesNo ratings yet
- New Enhancements To Feynmans Path Integral For Fermions: Peter Borrmann, Eberhard R. HilfDocument7 pagesNew Enhancements To Feynmans Path Integral For Fermions: Peter Borrmann, Eberhard R. Hilftestonly261No ratings yet
- Tolerance Interval For Exponentiated Exponential Distribution Based On Grouped DataDocument5 pagesTolerance Interval For Exponentiated Exponential Distribution Based On Grouped Datawww.irjes.comNo ratings yet
- Bargmann, On A Hilbert Space of Analytic Functions and An Associated Integral TransformDocument101 pagesBargmann, On A Hilbert Space of Analytic Functions and An Associated Integral Transformsaiyan2345No ratings yet
- Mazya Verbitsky 95Document35 pagesMazya Verbitsky 95mouna.chegaarNo ratings yet
- Institute of Mathematical StatisticsDocument12 pagesInstitute of Mathematical StatisticsSayoni BanerjeeNo ratings yet
- Applied Mathematics and Computation: S. Iqbal, A. JavedDocument9 pagesApplied Mathematics and Computation: S. Iqbal, A. JavedBack UpNo ratings yet
- CONRAD - Etale CohomologyDocument97 pagesCONRAD - Etale CohomologyWilfred Hulsbergen100% (1)
- Differential Quadrature and Splines: (Received May. 1975)Document6 pagesDifferential Quadrature and Splines: (Received May. 1975)Laila FouadNo ratings yet
- 3 Sums of Independent Random VariablesDocument14 pages3 Sums of Independent Random VariablessumokhanhvyNo ratings yet
- Hydrodynamics in Two Dimensions and Vortex Theory : PhysicsDocument22 pagesHydrodynamics in Two Dimensions and Vortex Theory : Physicsyijat18183No ratings yet
- (2018) Four Types of Dependencies For The Fuzzy AnalysisDocument12 pages(2018) Four Types of Dependencies For The Fuzzy AnalysisSyahiir KamilNo ratings yet
- The Fundamental Theorem of Calculus inDocument5 pagesThe Fundamental Theorem of Calculus inMike AlexNo ratings yet
- Application of Lie-Group Symmetry AnalysisDocument35 pagesApplication of Lie-Group Symmetry Analysiscatfan42No ratings yet
- Noether's Theorem - FinalDocument10 pagesNoether's Theorem - FinalZechNo ratings yet
- 19Document22 pages19Chế LinhNo ratings yet
- Lattice 2011 - 106Document7 pagesLattice 2011 - 106Chuquiure L. AngelNo ratings yet
- 2nd QuantizationDocument41 pages2nd QuantizationAlberto AlbuquerqueNo ratings yet
- On A Class of Infinite System of Third-Order DiffeDocument10 pagesOn A Class of Infinite System of Third-Order DiffeMZGIN BarwaryNo ratings yet
- Spectral and Structural Analysis of High Precision ®nite Di Erence Matrices For Elliptic OperatorsDocument47 pagesSpectral and Structural Analysis of High Precision ®nite Di Erence Matrices For Elliptic Operatorsاسامه محمدNo ratings yet
- V A Atanasov Et Al - Fordy-Kulish Model and Spinor Bose-Einstein CondensateDocument8 pagesV A Atanasov Et Al - Fordy-Kulish Model and Spinor Bose-Einstein CondensatePomac232No ratings yet
- A Gauge Field Theory of Chirally Folded Homopolymers With Applications To Folded ProteinsDocument6 pagesA Gauge Field Theory of Chirally Folded Homopolymers With Applications To Folded ProteinsJoon Suk HuhNo ratings yet
- Impossibility Theorems For Elementary Integration: Brian ConradDocument13 pagesImpossibility Theorems For Elementary Integration: Brian Conradbikis2008No ratings yet
- Quadrupole MomentsDocument5 pagesQuadrupole MomentsFernando JarixNo ratings yet
- A Semi-Implicit Mid-Point Rule For Stiff Systems of Ordinary Differential EquationsDocument26 pagesA Semi-Implicit Mid-Point Rule For Stiff Systems of Ordinary Differential EquationsKami JaraNo ratings yet
- Optimal Choice Between Parametric and Non-ParametrDocument30 pagesOptimal Choice Between Parametric and Non-ParametrpabloninoNo ratings yet
- DifferentialEntropy ExamplesDocument17 pagesDifferentialEntropy ExamplesJarrod HallNo ratings yet
- Enumeration of Strings: A. M. OdlyzkoDocument22 pagesEnumeration of Strings: A. M. OdlyzkogogobooNo ratings yet
- Resume of Krystynak - 1Document6 pagesResume of Krystynak - 1api-22169845No ratings yet
- Prony Method For ExponentialDocument21 pagesProny Method For ExponentialsoumyaNo ratings yet
- Lecture Notes Quantum Computing and Quantum Information: ES 643 Indian Institute of Technology Gandhinagar, 2018Document13 pagesLecture Notes Quantum Computing and Quantum Information: ES 643 Indian Institute of Technology Gandhinagar, 2018Sanu GangwarNo ratings yet
- A Multiscale Finite ElementDocument21 pagesA Multiscale Finite ElementZeljko LazarevicNo ratings yet
- Testing For Spectral Granger Causality: 15, Number 4, Pp. 1157-1166Document10 pagesTesting For Spectral Granger Causality: 15, Number 4, Pp. 1157-1166Shakti ShivaNo ratings yet
- Geometry of Multiple Zeta ValuesDocument9 pagesGeometry of Multiple Zeta ValuesqwertyNo ratings yet
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- Convolution and Equidistribution: Sato-Tate Theorems for Finite-Field Mellin Transforms (AM-180)From EverandConvolution and Equidistribution: Sato-Tate Theorems for Finite-Field Mellin Transforms (AM-180)No ratings yet
- 單字 1-3Document4 pages單字 1-3Victor ChenNo ratings yet
- The Multivariate Normal Distribution: Exactly Central LimitDocument59 pagesThe Multivariate Normal Distribution: Exactly Central LimitVictor ChenNo ratings yet
- 108-3 Business-Analytics Syllabus v1Document1 page108-3 Business-Analytics Syllabus v1Victor ChenNo ratings yet
- Handout 14: Unbiasedness and MSEDocument3 pagesHandout 14: Unbiasedness and MSEVictor ChenNo ratings yet
- Threshold Methods For Sample Extremes: at 1984 by 0. Reidel Publishing C0mpanyDocument18 pagesThreshold Methods For Sample Extremes: at 1984 by 0. Reidel Publishing C0mpanyVictor ChenNo ratings yet
- Lecture20 PDFDocument20 pagesLecture20 PDFkhitab12No ratings yet
- Tutorial State MachinesDocument4 pagesTutorial State MachinesLaurMateiNo ratings yet
- Engineering Mechanics by Shubham Singh U - 22 PDFDocument31 pagesEngineering Mechanics by Shubham Singh U - 22 PDFAnuj MauryaNo ratings yet
- Rectangular Hollow Plate-Fine Analysis-1Document14 pagesRectangular Hollow Plate-Fine Analysis-1Francisco UribeNo ratings yet
- Problems On Numerical MethodsDocument2 pagesProblems On Numerical MethodsGOPI NATH REDDYNo ratings yet
- C# QuizDocument4 pagesC# QuizJason DanleyNo ratings yet
- Wharton - Business Analytics - Week 5 - Summary TranscriptsDocument7 pagesWharton - Business Analytics - Week 5 - Summary Transcriptssoravit137No ratings yet
- BPC BW HierarchyDocument8 pagesBPC BW HierarchyJulio RafaelNo ratings yet
- Pitot TubeDocument19 pagesPitot TubeDianita Citra Dewi0% (1)
- bAST 2020 VerkadeTDocument40 pagesbAST 2020 VerkadeTALVARO FABIAN JO GUIVARNo ratings yet
- Mental Accounting of Income Tax and Value Added Tax Among Self-Employed Business OwnersDocument26 pagesMental Accounting of Income Tax and Value Added Tax Among Self-Employed Business OwnersBeLoopersNo ratings yet
- Signals and Systems-5.0 TextbookDocument748 pagesSignals and Systems-5.0 TextbookHansNo ratings yet
- Fixed and Fluidized Bed ExperimentDocument9 pagesFixed and Fluidized Bed Experimentsunlias50% (2)
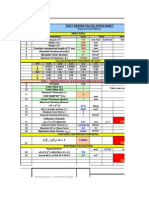
- Duct Design Calculation Sheet: Note:-Take the Value of α & β from above table use in the calculationDocument9 pagesDuct Design Calculation Sheet: Note:-Take the Value of α & β from above table use in the calculationchagar_harshNo ratings yet
- 01 Numerical Solution of Nonlinear EquationsDocument84 pages01 Numerical Solution of Nonlinear EquationsNguyễn Tiến DũngNo ratings yet
- Chapter 2 Signal Analysis and Mixing Tomasi ReviewDocument5 pagesChapter 2 Signal Analysis and Mixing Tomasi ReviewHannah Faith SulongNo ratings yet
- Machines 05 00021 v3 PDFDocument28 pagesMachines 05 00021 v3 PDFAuditio MandhanyNo ratings yet
- T6 - PID Controller - 2021Document36 pagesT6 - PID Controller - 2021James ChanNo ratings yet
- Introductory Algebra Workbook PDFDocument367 pagesIntroductory Algebra Workbook PDFmarceloNo ratings yet
- PHY103A: Lecture # 2: Semester II, 2017-18 Department of Physics, IIT KanpurDocument21 pagesPHY103A: Lecture # 2: Semester II, 2017-18 Department of Physics, IIT KanpurSABARI BALANo ratings yet
- Conics FormulaDocument3 pagesConics FormulaShahadat HossainNo ratings yet
- MCQ-Real AnalysisDocument26 pagesMCQ-Real Analysislulusutbk9No ratings yet
- Li 2021Document9 pagesLi 2021Smruti Ranjan PattanayakNo ratings yet
- General Physics A1: Ho Chi Minh City University of TechnologyDocument9 pagesGeneral Physics A1: Ho Chi Minh City University of TechnologyKhoa NguyenNo ratings yet
- Brief History of Burgers EquationDocument21 pagesBrief History of Burgers EquationRojin GomezNo ratings yet
- Noc18 Ee33 Assignment5Document6 pagesNoc18 Ee33 Assignment5Hari PrasathNo ratings yet
- EAI Endorsed Transactions Word 2007 TemplateDocument8 pagesEAI Endorsed Transactions Word 2007 Templatedeepa9bhardwajNo ratings yet