You might also like
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Periodic Nonlinear Schrδdinger EquationDocument26 pagesPeriodic Nonlinear Schrδdinger EquationGilberto JarvioNo ratings yet
- A Nystrom Method For A Class of FredholmDocument20 pagesA Nystrom Method For A Class of FredholmAydinel HakanNo ratings yet
- Shin'ichi Nojiri Et Al - Screening of Cosmological Constant in Non-Local GravityDocument7 pagesShin'ichi Nojiri Et Al - Screening of Cosmological Constant in Non-Local GravityVelveetNo ratings yet
- Canonical Quantization C6, HT 2016: 1.1 From Classical To Quantum TheoryDocument19 pagesCanonical Quantization C6, HT 2016: 1.1 From Classical To Quantum Theorycifarha venantNo ratings yet
- Bosonic String TheoryDocument50 pagesBosonic String Theorysumairah1906No ratings yet
- Meshless and Generalized Finite Element Methods: A Survey of Some Major ResultsDocument20 pagesMeshless and Generalized Finite Element Methods: A Survey of Some Major ResultsJorge Luis Garcia ZuñigaNo ratings yet
- Limit Theorems For Sums of A Random Number of Positive Independent Random VariablesDocument13 pagesLimit Theorems For Sums of A Random Number of Positive Independent Random VariablesКонстантин ГришинNo ratings yet
- A Numerical Algorithm Based On Rbfs For Solving An Inverse Source ProblemDocument10 pagesA Numerical Algorithm Based On Rbfs For Solving An Inverse Source ProblemAnibal Coronel PerezNo ratings yet
- M.A. Dariescu Et Al - Thermodynamics of Bosons in An Universe With Global PathologyDocument10 pagesM.A. Dariescu Et Al - Thermodynamics of Bosons in An Universe With Global PathologyAzmerzrNo ratings yet
- Spiral Singularities of A SemiflowDocument14 pagesSpiral Singularities of A SemiflowKamil DunstNo ratings yet
- Johnson (1974) GJI-Green's Function For Lamb's ProblemDocument33 pagesJohnson (1974) GJI-Green's Function For Lamb's Problemjesus flores garciaNo ratings yet
- Carl M. Bender Et Al - Compactons in PT - Symmetric Generalized Korteweg (De Vries EquationsDocument11 pagesCarl M. Bender Et Al - Compactons in PT - Symmetric Generalized Korteweg (De Vries EquationsPomac232No ratings yet
- Convolution Quadrature and Discretized Operational Calculus. IDocument17 pagesConvolution Quadrature and Discretized Operational Calculus. Irezza ruzuqiNo ratings yet
- PeskinDocument714 pagesPeskinShuchen Zhu100% (1)
- Global Solutions of MKDV With Critcal Initial DataDocument26 pagesGlobal Solutions of MKDV With Critcal Initial DataKamil DunstNo ratings yet
- Strichartz - 1977 - Restrictions of Fourier Transforms To Quadratic Surfaces and Decay of Solutions of Wave Equations.Document10 pagesStrichartz - 1977 - Restrictions of Fourier Transforms To Quadratic Surfaces and Decay of Solutions of Wave Equations.Jin WangNo ratings yet
- Wiener SpaceDocument22 pagesWiener SpaceforwardhoNo ratings yet
- Discrete Random Walk Models For Symmetric Levy-Feller Diusion ProcessesDocument11 pagesDiscrete Random Walk Models For Symmetric Levy-Feller Diusion ProcessesHugo Andrade AraújoNo ratings yet
- Convergence of A Regularized Gauss-Newton MethodDocument15 pagesConvergence of A Regularized Gauss-Newton MethodMárcioBarbozaNo ratings yet
- Equadiff Vienne 2007Document6 pagesEquadiff Vienne 2007hhedfiNo ratings yet
- Matrix ManipulatonDocument23 pagesMatrix ManipulatonducthienhuaNo ratings yet
- 2021 Spring Nonlinear Techniques For Nonlinear Dispersive PDEs 4Document10 pages2021 Spring Nonlinear Techniques For Nonlinear Dispersive PDEs 4chejianglongNo ratings yet
- The Fokker-Planck Equation ExplainedDocument12 pagesThe Fokker-Planck Equation ExplainedslamNo ratings yet
- Numerische Mathemaljk: A Globalization Scheme For The Generalized Gauss-Newton MethodDocument17 pagesNumerische Mathemaljk: A Globalization Scheme For The Generalized Gauss-Newton MethodMárcioBarbozaNo ratings yet
- Galois and Diophantine GeometryDocument44 pagesGalois and Diophantine GeometryMeraman OdedraNo ratings yet
- Variable Separated Solutions and Four-Dromion Excitations For (2+1) - Dimensional Nizhnik Novikov Veselov EquationDocument6 pagesVariable Separated Solutions and Four-Dromion Excitations For (2+1) - Dimensional Nizhnik Novikov Veselov EquationLymesNo ratings yet
- Section 4 AER506Document18 pagesSection 4 AER506MBNo ratings yet
- Finite difference modelling of the full acoustic wave equation in Matlab (REFERENCES)Document9 pagesFinite difference modelling of the full acoustic wave equation in Matlab (REFERENCES)Mikael Yuan EstuariwinarnoNo ratings yet
- Suppl MaterialsDocument12 pagesSuppl MaterialsrichardNo ratings yet
- A Semi-Implicit Mid-Point Rule For Stiff Systems of Ordinary Differential EquationsDocument26 pagesA Semi-Implicit Mid-Point Rule For Stiff Systems of Ordinary Differential EquationsKami JaraNo ratings yet
- Charpits Method PDFDocument7 pagesCharpits Method PDFRajeev Kumar JohariNo ratings yet
- 2017 HW1Document4 pages2017 HW1OmegaNo ratings yet
- Bisognin, Menzala - Decay Rates of The Solutions of Nonlinear Dispersive EquationsDocument16 pagesBisognin, Menzala - Decay Rates of The Solutions of Nonlinear Dispersive EquationsFelipe PipicanoNo ratings yet
- Stability and Convergence of The Wavelet-Galerkin ...Document19 pagesStability and Convergence of The Wavelet-Galerkin ...Luu KhoaNo ratings yet
- Week3 PDFDocument16 pagesWeek3 PDFmouseandmooseNo ratings yet
- Homework 6: AMATH 353 Partial Differential Equations and Waves Weston Barger Summer 2016Document2 pagesHomework 6: AMATH 353 Partial Differential Equations and Waves Weston Barger Summer 2016ranvNo ratings yet
- Field Theory Chapter 3Document51 pagesField Theory Chapter 3Ericleiton sergioNo ratings yet
- Explicit Second-Order Accurate Schemes For The Nonlinear Schrödinger EquationsDocument13 pagesExplicit Second-Order Accurate Schemes For The Nonlinear Schrödinger Equationsdab_scribdNo ratings yet
- Cordaro, P. Análise Funcional.Document21 pagesCordaro, P. Análise Funcional.v1ct0rhug023No ratings yet
- Táboas, P. (1990) - Periodic Solutions of A Planar Delay Equation.Document17 pagesTáboas, P. (1990) - Periodic Solutions of A Planar Delay Equation.Nolbert Yonel Morales TineoNo ratings yet
- Alberto Bressan and Yuxi Zheng - Conservative Solutions To A Nonlinear Variational Wave EquationDocument30 pagesAlberto Bressan and Yuxi Zheng - Conservative Solutions To A Nonlinear Variational Wave EquationPonmijNo ratings yet
- PY 502, Computational Physics, Fall 2018 Numerical Solutions of The SCHR Odinger EquationDocument26 pagesPY 502, Computational Physics, Fall 2018 Numerical Solutions of The SCHR Odinger Equationnagatopein6No ratings yet
- The Convergence of Quasi-Gauss-Newton Methods For Nonlinear ProblemsDocument12 pagesThe Convergence of Quasi-Gauss-Newton Methods For Nonlinear ProblemsMárcioBarbozaNo ratings yet
- The Diophantine Equation: Line LDocument32 pagesThe Diophantine Equation: Line LKarlstein DiaoNo ratings yet
- Solvable Models of Relativistic Charged Spherically Symmetric Fluids (Rod Halburd)Document15 pagesSolvable Models of Relativistic Charged Spherically Symmetric Fluids (Rod Halburd)Jason UchennnaNo ratings yet
- Thieme 1992Document9 pagesThieme 1992Emmanuel GolohorNo ratings yet
- M2an 1977 11 1 93 0Document16 pagesM2an 1977 11 1 93 0Zina SawafNo ratings yet
- JMM Volume 7 Issue 2 Pages 231-250Document20 pagesJMM Volume 7 Issue 2 Pages 231-250milahnur sitiNo ratings yet
- Effects of nonlinearity in quantum mechanics exampleDocument12 pagesEffects of nonlinearity in quantum mechanics examplecaglarberkmanNo ratings yet
- Massimo Giovannini - Homogeneous and Isotropic Big Rips?Document8 pagesMassimo Giovannini - Homogeneous and Isotropic Big Rips?Dex30KMNo ratings yet
- Journal of Mathematical Analysis and Applications: N.M. Ivanova, C. Sophocleous, P.G.L. LeachDocument14 pagesJournal of Mathematical Analysis and Applications: N.M. Ivanova, C. Sophocleous, P.G.L. LeachDewi Sartika TampubolonNo ratings yet
- Large-Time Asymptotics For Solutions of A Generalized Burgers Equation With Variable ViscosityDocument23 pagesLarge-Time Asymptotics For Solutions of A Generalized Burgers Equation With Variable ViscositychandruNo ratings yet
- Electronic Journal of Qualitative Theory of Differential Equations 2005, No. 20, 1-21 HTTP://WWW - Math.u-Szeged - Hu/ejqtdeDocument21 pagesElectronic Journal of Qualitative Theory of Differential Equations 2005, No. 20, 1-21 HTTP://WWW - Math.u-Szeged - Hu/ejqtdeLuis FuentesNo ratings yet
- Nambu-Goto String Action With Gauss-Bonnet TermDocument11 pagesNambu-Goto String Action With Gauss-Bonnet TermKevin Juan Román RafaeleNo ratings yet
- Adams, Atiyah - K-Theory and The Hopf Invariant PDFDocument8 pagesAdams, Atiyah - K-Theory and The Hopf Invariant PDFab1699No ratings yet
- Fox, Applications of Mellin's Transformation to Integral Equations, Proc. London Math. Soc., vol. s2-38, issue 1, 1935Document8 pagesFox, Applications of Mellin's Transformation to Integral Equations, Proc. London Math. Soc., vol. s2-38, issue 1, 1935les classes moyennesNo ratings yet
- 1 - Detk,,) Iti2 S&T A, (+A .: XJ X+ X), A, Eyx) ODocument3 pages1 - Detk,,) Iti2 S&T A, (+A .: XJ X+ X), A, Eyx) OPatrick WongNo ratings yet
- SS3 Physics AC IN RESISTOR, INDUCTOR AND CAPACITORDocument15 pagesSS3 Physics AC IN RESISTOR, INDUCTOR AND CAPACITORsunliasNo ratings yet
- 3D FDEM FractureDocument48 pages3D FDEM Fractureyagebu88No ratings yet
- Reservoir Engineering I: Barham S. Mahmood E-Mail: Petroleum Engineering DepartmentDocument16 pagesReservoir Engineering I: Barham S. Mahmood E-Mail: Petroleum Engineering DepartmentAbdulla MohammadNo ratings yet
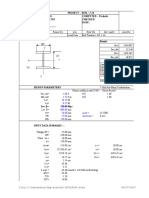
- Column Is800Document4 pagesColumn Is800rammohanNo ratings yet
- The Conservation of Orbital Symmetry PDFDocument6 pagesThe Conservation of Orbital Symmetry PDFKaren Viviana Londono GordilloNo ratings yet
- QUE 1 TestDocument22 pagesQUE 1 TestKrishnaKanthNo ratings yet
- Capacitance - Wikipedia, The Free EncyclopediaDocument5 pagesCapacitance - Wikipedia, The Free Encyclopediadonodoni0008No ratings yet
- Achievement Standard: Number Page 1 of 2Document2 pagesAchievement Standard: Number Page 1 of 2Sathyanarayanan SrinivasanNo ratings yet
- Radiation View FactorsDocument20 pagesRadiation View FactorsTlm BhopalNo ratings yet
- Solution Manual For Introduction To Chemistry 4th Edition by BauerDocument30 pagesSolution Manual For Introduction To Chemistry 4th Edition by Bauera538077103No ratings yet
- Newton's Laws of Motion ProblemsDocument3 pagesNewton's Laws of Motion ProblemsGabriel FernandesNo ratings yet
- Control Valve Sizing Procedure for Gas ServiceDocument7 pagesControl Valve Sizing Procedure for Gas ServiceJaydeep PatelNo ratings yet
- R.F. Casten - Nuclear Structure From A Simple Perspective (Dragged)Document9 pagesR.F. Casten - Nuclear Structure From A Simple Perspective (Dragged)Sorin UjeniucNo ratings yet
- The Seismic Design Handbook, 2nd Edition: Errata ForDocument6 pagesThe Seismic Design Handbook, 2nd Edition: Errata Foreduardox1No ratings yet
- Bea L. Berondo's Science Week 1 ActivitiesDocument4 pagesBea L. Berondo's Science Week 1 ActivitiesMae CherryNo ratings yet
- Prof InternDocument15 pagesProf InternPratyushAgarwalNo ratings yet
- L19-21 Chapter 6Document17 pagesL19-21 Chapter 6Luqman HakimNo ratings yet
- Covariance and Invariance in Physics, The Mathematization of PhysicsDocument11 pagesCovariance and Invariance in Physics, The Mathematization of PhysicsGeorge Mpantes mathematics teacher100% (1)
- Experiment 6Document7 pagesExperiment 6swamyNo ratings yet
- Steel and Timber Design Benchmarks - EnuDocument456 pagesSteel and Timber Design Benchmarks - EnuKang'ethe GeoffreyNo ratings yet
- GAYA-GAYA TERDISTRIBUSI N Centroid PDFDocument18 pagesGAYA-GAYA TERDISTRIBUSI N Centroid PDFGiadika Surya KusumahNo ratings yet
- Chem B Unit 3 Heat of Combustion Lab ReplacementDocument3 pagesChem B Unit 3 Heat of Combustion Lab ReplacementjocelynNo ratings yet
- Describing Function and Application: InductanceDocument2 pagesDescribing Function and Application: InductanceAbdulloh KhoironyNo ratings yet
- Analisis Kestabilan Lereng Berdasarkan Kekuatan Geser Massa Batuan Terhadap Perubahan Kandungan Air Pada Tambang Batubara Di Area Blok MenyangoDocument7 pagesAnalisis Kestabilan Lereng Berdasarkan Kekuatan Geser Massa Batuan Terhadap Perubahan Kandungan Air Pada Tambang Batubara Di Area Blok Menyangola ode ismailNo ratings yet
- Exercise - Moon MissionDocument14 pagesExercise - Moon Missional3ssi086No ratings yet
- Nanocharacterisation, 2007, p.319 PDFDocument319 pagesNanocharacterisation, 2007, p.319 PDFArunmaalaNo ratings yet
- 3.8, δ and d notations for changes: Large changes: We use the Greek symbolDocument7 pages3.8, δ and d notations for changes: Large changes: We use the Greek symbolmasyuki1979No ratings yet
- Thermal Effects in Electrochemical Systems: ThermodynamicsDocument30 pagesThermal Effects in Electrochemical Systems: ThermodynamicseckutricNo ratings yet
- Properties of Pure SubstancesDocument67 pagesProperties of Pure SubstancesJun XianNo ratings yet
- Stego Accessories Calculation of Temperature Control en 0911Document1 pageStego Accessories Calculation of Temperature Control en 0911AnnNo ratings yet
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormFrom EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormRating: 5 out of 5 stars5/5 (5)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.From EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Rating: 5 out of 5 stars5/5 (1)
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingFrom EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingRating: 4.5 out of 5 stars4.5/5 (21)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsFrom EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsRating: 4.5 out of 5 stars4.5/5 (3)
- Mental Math Secrets - How To Be a Human CalculatorFrom EverandMental Math Secrets - How To Be a Human CalculatorRating: 5 out of 5 stars5/5 (3)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormFrom EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormRating: 4.5 out of 5 stars4.5/5 (20)
- Making and Tinkering With STEM: Solving Design Challenges With Young ChildrenFrom EverandMaking and Tinkering With STEM: Solving Design Challenges With Young ChildrenNo ratings yet
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeFrom EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeRating: 4 out of 5 stars4/5 (2)
- Strategies for Problem Solving: Equip Kids to Solve Math Problems With ConfidenceFrom EverandStrategies for Problem Solving: Equip Kids to Solve Math Problems With ConfidenceNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Fluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldFrom EverandFluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldRating: 3 out of 5 stars3/5 (79)
- Calculus Workbook For Dummies with Online PracticeFrom EverandCalculus Workbook For Dummies with Online PracticeRating: 3.5 out of 5 stars3.5/5 (8)
- Limitless Mind: Learn, Lead, and Live Without BarriersFrom EverandLimitless Mind: Learn, Lead, and Live Without BarriersRating: 4 out of 5 stars4/5 (6)
- How Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsFrom EverandHow Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsRating: 3.5 out of 5 stars3.5/5 (9)