You might also like
- BusDocument30 pagesBussham100% (8)
- Advanced Gear Manufacturing and Finishing: Classical and Modern ProcessesFrom EverandAdvanced Gear Manufacturing and Finishing: Classical and Modern ProcessesRating: 3.5 out of 5 stars3.5/5 (2)
- Study of Four Wheel Steering Mechanism: JournalDocument4 pagesStudy of Four Wheel Steering Mechanism: JournalSiva HariNo ratings yet
- Dual Mode Four Wheel Steering System: Sanu Adolphus Sooraj AbrahamDocument7 pagesDual Mode Four Wheel Steering System: Sanu Adolphus Sooraj AbrahamVincent RobinsonNo ratings yet
- Four Wheel Steering System DocumentDocument20 pagesFour Wheel Steering System DocumentBala comfortNo ratings yet
- Project SynapsisDocument6 pagesProject Synapsisnayan RNo ratings yet
- 1.automobile Lab ManualDocument44 pages1.automobile Lab Manualharshita gupta100% (1)
- Advanced Four Wheel Steering SystemDocument5 pagesAdvanced Four Wheel Steering SystemSyedAbuBakar'sAlkaffNo ratings yet
- Irjet V5i1341Document8 pagesIrjet V5i1341tarik.sivrilerNo ratings yet
- Be-Automobile Lab ManualDocument42 pagesBe-Automobile Lab ManualA.j. Jain100% (1)
- IRJET V7I11275 FourWheelSteeringforATVDocument10 pagesIRJET V7I11275 FourWheelSteeringforATVHadesNo ratings yet
- Project Seminor Final ReviewDocument17 pagesProject Seminor Final ReviewDr.KVSRIT PrincipalNo ratings yet
- Automobile Lab ManualDocument35 pagesAutomobile Lab ManualKeshav AsopaNo ratings yet
- Automatic Side Stand Retrival SystemDocument4 pagesAutomatic Side Stand Retrival SystemsankaramarayananNo ratings yet
- Four-Wheel Steering Mechanism - ReviewDocument4 pagesFour-Wheel Steering Mechanism - ReviewRajatNo ratings yet
- Introduction To Automobile: Four Wheel DriveDocument20 pagesIntroduction To Automobile: Four Wheel DriveRavi AnuNo ratings yet
- Six Wheel Three Mode Steering System PDFDocument6 pagesSix Wheel Three Mode Steering System PDFSEELAM HARSHAVARDHANREDDYNo ratings yet
- Automobile Engineering Lab Manual For B E Mechanical by D S DabhadeDocument44 pagesAutomobile Engineering Lab Manual For B E Mechanical by D S DabhadeAman SarfarazNo ratings yet
- 4 Wheel SterringDocument8 pages4 Wheel Sterringrkh02992No ratings yet
- Irjet V5i3171Document3 pagesIrjet V5i3171Tejzas ParabNo ratings yet
- Automobile Engineering Lab Manual For B E Mechanical by D S DabhadeDocument44 pagesAutomobile Engineering Lab Manual For B E Mechanical by D S DabhadeСергей ДороховNo ratings yet
- Development of 360 Degree Rotating VehicleDocument4 pagesDevelopment of 360 Degree Rotating VehicleIJIRST57% (7)
- Study of Zero Turn Vehicle: Shirsathsachin, Jadhav Kiran, Patil Rahul, Mohite Abhilash, D.D. PatilDocument8 pagesStudy of Zero Turn Vehicle: Shirsathsachin, Jadhav Kiran, Patil Rahul, Mohite Abhilash, D.D. Patilkush alladiNo ratings yet
- Mechanical Four Wheels SteeringDocument74 pagesMechanical Four Wheels Steeringvijayan m g91% (22)
- V3i6 Ijertv3is060127 PDFDocument5 pagesV3i6 Ijertv3is060127 PDFCassio Antonio Neto AmaralNo ratings yet
- Hilal Ahmad 1Document42 pagesHilal Ahmad 1Moin ul IslamNo ratings yet
- An Approach To Parallel Parking and Zero PDFDocument4 pagesAn Approach To Parallel Parking and Zero PDFajayNo ratings yet
- Model of Anti Roll Back System On Hilling Situation in Car-29317Document4 pagesModel of Anti Roll Back System On Hilling Situation in Car-29317kanchan boneNo ratings yet
- Vehicle Dynamics: R. Sai SandeepDocument12 pagesVehicle Dynamics: R. Sai SandeepRudra Sai SandeepNo ratings yet
- Chain Operated Quadra Steering MechanismDocument5 pagesChain Operated Quadra Steering MechanismIJIRSTNo ratings yet
- Industrial Training ReportDocument21 pagesIndustrial Training ReportSanniChChureNo ratings yet
- Deenbandhu Chhotu Ram University of Science and Technology: Industrial Training AT Jtekt India Private LTDDocument21 pagesDeenbandhu Chhotu Ram University of Science and Technology: Industrial Training AT Jtekt India Private LTDtanuj kalraNo ratings yet
- Three Mode Steering System For Light Weight Automobile VehiclesDocument4 pagesThree Mode Steering System For Light Weight Automobile VehiclesKarthik kNo ratings yet
- Steering SystemDocument12 pagesSteering Systemmayur_lanjewarNo ratings yet
- Design of Steering Gear System in Passenger Car: A Review: February 2018Document8 pagesDesign of Steering Gear System in Passenger Car: A Review: February 2018Turra GusainNo ratings yet
- 90 Degree Turning Motorized Steering MechanismDocument62 pages90 Degree Turning Motorized Steering MechanismMani Kandan100% (1)
- Design and Fabrication of Multifunctional Steering MechanismDocument14 pagesDesign and Fabrication of Multifunctional Steering MechanismVivek DoiphodeNo ratings yet
- Four Wheels SteeringDocument18 pagesFour Wheels SteeringArpith KumarNo ratings yet
- Steering Mechanism With Zero Turning RadiusDocument19 pagesSteering Mechanism With Zero Turning RadiusAbhay RanjanNo ratings yet
- Four Wheels SteeringDocument19 pagesFour Wheels SteeringBharathNaikPanjaNo ratings yet
- Ijcrt22a6502 Rack PinonDocument9 pagesIjcrt22a6502 Rack PinonenkusilasorsaNo ratings yet
- Design and Implementation of Cutting Brakes in ATV IJERTCONV7IS06024Document5 pagesDesign and Implementation of Cutting Brakes in ATV IJERTCONV7IS06024SarathNo ratings yet
- 6th Semestermechanical Automobile Engineering Lab ManualDocument21 pages6th Semestermechanical Automobile Engineering Lab ManualSayan BiswasNo ratings yet
- Four WheelDocument14 pagesFour WheelMaheshNo ratings yet
- Four Wheel SteeringDocument5 pagesFour Wheel SteeringMectrosoft Creative technologyNo ratings yet
- Three Mode Steering System For Light Weight Automobile VehiclesDocument4 pagesThree Mode Steering System For Light Weight Automobile VehiclesijsretNo ratings yet
- Project ReportDocument57 pagesProject ReportMathavan KuttyNo ratings yet
- Wheel Steering System PDFDocument6 pagesWheel Steering System PDFvivek ghoriNo ratings yet
- LAB Manual Automobile-EngineeringDocument34 pagesLAB Manual Automobile-EngineeringManjinderjit SinghNo ratings yet
- Automatic Side StandDocument2 pagesAutomatic Side StandGowtham KarthiNo ratings yet
- 1 Front Page (13 Files Merged)Document27 pages1 Front Page (13 Files Merged)SreekanthKottavilayilNo ratings yet
- Four Wheel Steering SystemDocument26 pagesFour Wheel Steering SystemRavindra Singh RathoreNo ratings yet
- Original ResearchDocument7 pagesOriginal Researchkush alladiNo ratings yet
- Four-Wheel SteeringDocument17 pagesFour-Wheel SteeringSarang VasugadeNo ratings yet
- Project ReportDocument21 pagesProject ReportSanniChChureNo ratings yet
- Tribhuvan University Institute of Engineering Thapathali CampusDocument10 pagesTribhuvan University Institute of Engineering Thapathali CampusRustam Alee KhanNo ratings yet
- Four Wheel Steering SystemDocument14 pagesFour Wheel Steering SystemChakri KankipatiNo ratings yet
- Usage of Tumbler Gear Mechanism in Four Wheel SteeringDocument5 pagesUsage of Tumbler Gear Mechanism in Four Wheel SteeringKitkuparbha MawrieNo ratings yet
- Design and Manufacturing of Differential Locking SystemDocument6 pagesDesign and Manufacturing of Differential Locking SystemShashank VaidyaNo ratings yet
- 02 ICP310 SAP AFS MasterDataDocument68 pages02 ICP310 SAP AFS MasterDatatsoh100% (1)
- Current Limiting ReactorDocument10 pagesCurrent Limiting ReactorLRHENGNo ratings yet
- Automatic Cell Image Segmentation Using Genetic AlgorithmsDocument5 pagesAutomatic Cell Image Segmentation Using Genetic AlgorithmsAintMustache AvedearenaNo ratings yet
- IMO Performance Standards For Heading Control SystemsDocument2 pagesIMO Performance Standards For Heading Control Systemsatinder13No ratings yet
- Kampa Tent Catalogue 2014Document32 pagesKampa Tent Catalogue 2014Richard100% (1)
- Manual de Operación Vibro Compactador Hamm HD8W HD 10C WDocument84 pagesManual de Operación Vibro Compactador Hamm HD8W HD 10C Wjavier carreñoNo ratings yet
- DIP3E Chapter02 ArtDocument44 pagesDIP3E Chapter02 Artclaude feuneNo ratings yet
- Technical Manual: TroubleshootingDocument113 pagesTechnical Manual: TroubleshootingKevine Khaled100% (1)
- Acer Back To School PromoDocument9 pagesAcer Back To School PromoAubrey CaballeroNo ratings yet
- ASTM A 706 Standard Specification For Low-Alloy Steel Deformed and Plain Bars For Concrete ReinforcementDocument5 pagesASTM A 706 Standard Specification For Low-Alloy Steel Deformed and Plain Bars For Concrete ReinforcementRyan LasacaNo ratings yet
- Business Plan Chapter 4Document4 pagesBusiness Plan Chapter 4Emmanuel AkoloNo ratings yet
- Anuj Agrawal: Home - Iitk.ac - In/ AnujDocument3 pagesAnuj Agrawal: Home - Iitk.ac - In/ AnujvishwajitNo ratings yet
- Literature - Commercial PDFDocument12 pagesLiterature - Commercial PDFArun GuptaNo ratings yet
- PC System Programming PDFDocument939 pagesPC System Programming PDFDungeon MasterNo ratings yet
- Sample Questions Pgpex-VlmDocument5 pagesSample Questions Pgpex-VlmASHUTOSH RANJANNo ratings yet
- National Institute of Technology Calicut: Academic Calendar For Winter Semester 2011-2012 (Approved by 34th Senate)Document1 pageNational Institute of Technology Calicut: Academic Calendar For Winter Semester 2011-2012 (Approved by 34th Senate)aaarun1010No ratings yet
- Atm SynopsisDocument8 pagesAtm Synopsismarifs2002No ratings yet
- Precast FlooringDocument20 pagesPrecast FlooringantonamxNo ratings yet
- U 1 A MDRPDFDocument1 pageU 1 A MDRPDFअभि ना. कुंभारNo ratings yet
- Brochure RV Series Rotary Vane Actuators Shafer en 86698Document8 pagesBrochure RV Series Rotary Vane Actuators Shafer en 86698josecordova2014No ratings yet
- Uninterruptible Power Supply Ups Installation and Testing - PaktechpointDocument10 pagesUninterruptible Power Supply Ups Installation and Testing - Paktechpointsserbest777No ratings yet
- LED Color Temperature in KelvinDocument6 pagesLED Color Temperature in KelvinAndreson LNo ratings yet
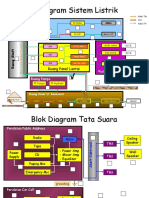
- Block Diagram M-E-RDocument11 pagesBlock Diagram M-E-RCobu LamNo ratings yet
- 3 ConcreteWorksDocument19 pages3 ConcreteWorksMuhammad AgungNo ratings yet
- Bubble Map 2021-06-09Document1 pageBubble Map 2021-06-09Tserendolgor Enkh-AmgalanNo ratings yet
- AutoCAD LAboratory ManualDocument77 pagesAutoCAD LAboratory ManualAhlvin Napiza100% (1)
- Quick Charge Device ListDocument11 pagesQuick Charge Device ListdrabssbNo ratings yet
- Lavavajillas New Pol XD-900 IX DG ExperienceDocument80 pagesLavavajillas New Pol XD-900 IX DG Experiencemalba1973No ratings yet
- Ajhal 3.3 PDFDocument9 pagesAjhal 3.3 PDFadeel khosaNo ratings yet
- Axial Capacity of Piles in Soil As Per Irc78-2014Document1 pageAxial Capacity of Piles in Soil As Per Irc78-2014Sushant MallickNo ratings yet