You might also like
- Survey - Area and VolumeDocument17 pagesSurvey - Area and VolumeSyahir Hamidon100% (1)
- 09-Traverse SurveyingDocument26 pages09-Traverse SurveyingKristine DizonNo ratings yet
- Triangulation and TrilateritationDocument62 pagesTriangulation and TrilateritationVicky ZambranoNo ratings yet
- Positioning techniquesDocument11 pagesPositioning techniqueschuk77No ratings yet
- Triangulation NotesDocument13 pagesTriangulation NotesNagarajHBNo ratings yet
- Lesson 2 - Chain SurveyingDocument34 pagesLesson 2 - Chain SurveyingBryanNo ratings yet
- Lecture 10B - Area Computation Techniques and Omitted MeasurementsDocument14 pagesLecture 10B - Area Computation Techniques and Omitted MeasurementsAndreaMiccaBautistaNo ratings yet
- Triangulation SurveyDocument21 pagesTriangulation SurveyGTSNo ratings yet
- Angle Measurement: Intersection and ResectionDocument23 pagesAngle Measurement: Intersection and ResectionHoney SinghNo ratings yet
- Learning Module 2 CE 245Document20 pagesLearning Module 2 CE 245Benmark JabayNo ratings yet
- Curve Setting EssentialsDocument22 pagesCurve Setting EssentialsNura GuyoNo ratings yet
- CEET416 - Compound CurveDocument3 pagesCEET416 - Compound CurvepipedsNo ratings yet
- Compass SurveyingDocument26 pagesCompass SurveyingsiyamsankerNo ratings yet
- Measurement Error Classification GuideDocument32 pagesMeasurement Error Classification GuideManish AhujaNo ratings yet
- EARTHWORK CALCULATION FORMULASDocument14 pagesEARTHWORK CALCULATION FORMULASpaul macharia100% (1)
- Chapter 3 - CurvesDocument46 pagesChapter 3 - CurvesAnish Pokharel100% (1)
- Traverse SurveyDocument9 pagesTraverse SurveyIkhwan JoniNo ratings yet
- Lecture Notes on Introduction to SurveyingDocument7 pagesLecture Notes on Introduction to SurveyingmadhuripathakNo ratings yet
- GE 117 3B WF Problem Set 1Document3 pagesGE 117 3B WF Problem Set 1AndreaMiccaBautista0% (1)
- Lecture 8 Vertical Curve (C2)Document18 pagesLecture 8 Vertical Curve (C2)Rujhat Zakhoy100% (1)
- Theodolite Traversing Calculation - CalculationDocument10 pagesTheodolite Traversing Calculation - CalculationSteven Kua100% (1)
- Resection and intersection techniques for establishing point coordinatesDocument5 pagesResection and intersection techniques for establishing point coordinatesWaled Hantash100% (1)
- Basics of Tacheometry and Stadia MethodDocument20 pagesBasics of Tacheometry and Stadia MethodMuhammed AliNo ratings yet
- Lecture 1Document136 pagesLecture 1Mesapam Shashi0% (1)
- Chapter 1 - Triangulation and TrilaterationDocument21 pagesChapter 1 - Triangulation and TrilaterationABAMELANo ratings yet
- Final Exam 2014-QuestionDocument2 pagesFinal Exam 2014-QuestionPannhaa100% (2)
- Traversing Types, Procedure, ErrorsDocument10 pagesTraversing Types, Procedure, ErrorsIrwan Pratama100% (1)
- STADIA SURVEYINGDocument10 pagesSTADIA SURVEYINGJGon100% (1)
- Fundamentals of Surveying - Omitted MeasurementsDocument12 pagesFundamentals of Surveying - Omitted MeasurementsJulius CodiamatNo ratings yet
- Errors in Tacheometric Surveying: This Study Resource Was Shared ViaDocument6 pagesErrors in Tacheometric Surveying: This Study Resource Was Shared ViaBindeshwar YadavNo ratings yet
- MODULE 9 CE 214 Fundamentals of SurveyingDocument13 pagesMODULE 9 CE 214 Fundamentals of SurveyingANNEKA G. ABANTONo ratings yet
- LevelingDocument50 pagesLevelingvinoNo ratings yet
- Stadia Surveying Principles and MeasurementsDocument12 pagesStadia Surveying Principles and Measurementscyril_515100% (1)
- Coordinates and TraverseDocument39 pagesCoordinates and Traversegeo_uno100% (1)
- Surveying BEC102 7 - Volume EarthworkDocument35 pagesSurveying BEC102 7 - Volume EarthworkjfejfeNo ratings yet
- Unit Exam 1Document4 pagesUnit Exam 1Brix Mendoza50% (4)
- 7 Area ComputationDocument22 pages7 Area Computationsajid khanNo ratings yet
- Theory of Theodolite TraversingDocument2 pagesTheory of Theodolite TraversingSuman Jyoti100% (3)
- Surveying Lab ManualDocument33 pagesSurveying Lab Manualhima sagarNo ratings yet
- Surveying 2019bDocument30 pagesSurveying 2019bhazel100% (1)
- Surveying BEC102 4 - Longitudinal and Cross SectionsDocument31 pagesSurveying BEC102 4 - Longitudinal and Cross Sectionsjfejfe0% (1)
- Fundamentals of Surveying - Horizontal CurvesDocument17 pagesFundamentals of Surveying - Horizontal CurvesRoxanne BorjaNo ratings yet
- Traverse Adjustment Using ExcelDocument21 pagesTraverse Adjustment Using ExcelGiora Rozmarin83% (6)
- Surveying PDFDocument6 pagesSurveying PDFremster OñateNo ratings yet
- Control SurveyDocument7 pagesControl SurveyVerlyn Kate Pang-ayNo ratings yet
- Traverse Error and Correction PDFDocument43 pagesTraverse Error and Correction PDFRajendra K Karki100% (1)
- Surveying Mid Exam QuestionsDocument2 pagesSurveying Mid Exam QuestionsSanjeev Rao100% (1)
- Ge100 Lecture 2Document43 pagesGe100 Lecture 2honey jamero100% (3)
- Curves-I: An Edusat Lecture OnDocument49 pagesCurves-I: An Edusat Lecture Onmapasure67% (3)
- CE120-02 Omitted Measurements ExampleDocument2 pagesCE120-02 Omitted Measurements ExampleOtto OctaviusNo ratings yet
- Calculating area and volume from field measurementsDocument16 pagesCalculating area and volume from field measurementsPrashani Ulapane100% (1)
- Hydrographic Surveys Group 5Document59 pagesHydrographic Surveys Group 5allen2912100% (1)
- 04 Tape Corrections PDFDocument25 pages04 Tape Corrections PDFFrancis GNo ratings yet
- Setting Out: Gls518 Intermediate Engineering SurveyingDocument57 pagesSetting Out: Gls518 Intermediate Engineering SurveyingHafidz Najmi100% (3)
- Topic 6-Introduction To TrigonometryDocument26 pagesTopic 6-Introduction To Trigonometryshaunjali21No ratings yet
- IGCSEFM TrigonometryII 3DTrigSineCosineDocument28 pagesIGCSEFM TrigonometryII 3DTrigSineCosinesreelakshmi100% (1)
- Year 5 Mathematics-WorkbookDocument55 pagesYear 5 Mathematics-Workbookjothi balajiNo ratings yet
- Mensuration Formulas & ProblemsDocument14 pagesMensuration Formulas & ProblemsNot Ismdan100% (1)
- Areas of Plane FiguresDocument9 pagesAreas of Plane FiguresSeanNo ratings yet
- Trigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsFrom EverandTrigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- Types of Coordinate Systems: - (1) Global Cartesian - (2) Geographic - (3) ProjectedDocument12 pagesTypes of Coordinate Systems: - (1) Global Cartesian - (2) Geographic - (3) ProjectedWassan IdreesNo ratings yet
- Land ownership defined as lawful title to use, operate propertyDocument2 pagesLand ownership defined as lawful title to use, operate propertyShler DoskiNo ratings yet
- Engineering Surveying Department Document on BordersDocument2 pagesEngineering Surveying Department Document on BordersWassan IdreesNo ratings yet
- Land Tenure Security According To Land Registration Systems in IraqDocument14 pagesLand Tenure Security According To Land Registration Systems in IraqWassan IdreesNo ratings yet
- Land ownership defined as lawful title to use, operate propertyDocument2 pagesLand ownership defined as lawful title to use, operate propertyShler DoskiNo ratings yet
- Land Laws GuideDocument22 pagesLand Laws GuideWassan IdreesNo ratings yet
- Land Tenure Security According To Land Registration Systems in IraqDocument14 pagesLand Tenure Security According To Land Registration Systems in IraqWassan IdreesNo ratings yet
- Land Rights Issues in International HRLDocument10 pagesLand Rights Issues in International HRLgundi4No ratings yet
- Road and Slope Set OutDocument10 pagesRoad and Slope Set OutWassan IdreesNo ratings yet
- Land ConsumptionDocument2 pagesLand ConsumptionWassan IdreesNo ratings yet
- Land Laws:: Dr. Eng. Shireen Y. Ismael 3Document13 pagesLand Laws:: Dr. Eng. Shireen Y. Ismael 3Wassan IdreesNo ratings yet
- Find depth of cut and curve peak elevationDocument1 pageFind depth of cut and curve peak elevationWassan IdreesNo ratings yet
- 1 IntroductionDocument43 pages1 IntroductionWassan IdreesNo ratings yet
- Land ConsumptionDocument2 pagesLand ConsumptionWassan IdreesNo ratings yet
- Shear Force and Bending Moment Daigram Examples PDFDocument4 pagesShear Force and Bending Moment Daigram Examples PDFWassan IdreesNo ratings yet
- 4 Shear and Moment Daigrams Graphical MethodDocument24 pages4 Shear and Moment Daigrams Graphical MethodWassan IdreesNo ratings yet
- 5 - Statically Determinate FramesDocument14 pages5 - Statically Determinate FramesWassan IdreesNo ratings yet
- Chapter 2-Measuring InstrumentDocument25 pagesChapter 2-Measuring InstrumentRîtweek ÞânɖeyNo ratings yet
- Engg EnggAcademia CommonSubjects DrawingUnit-IDocument24 pagesEngg EnggAcademia CommonSubjects DrawingUnit-IsimalaraviNo ratings yet
- 1 IntroductionDocument43 pages1 IntroductionWassan IdreesNo ratings yet
- Cadastral Surveying: University of Duhok College of Engineering Surveying DepartmentDocument20 pagesCadastral Surveying: University of Duhok College of Engineering Surveying DepartmentWassan IdreesNo ratings yet
- Assignment of TimeDocument1 pageAssignment of TimeWassan IdreesNo ratings yet
- Earth Timeline: by Faraj Allah Idrees Faraj Allah Supervised by Mr. BawerDocument9 pagesEarth Timeline: by Faraj Allah Idrees Faraj Allah Supervised by Mr. BawerWassan IdreesNo ratings yet
- 1 IntroductionDocument43 pages1 IntroductionWassan IdreesNo ratings yet
- Assignment GeodesyDocument1 pageAssignment GeodesyWassan IdreesNo ratings yet
- Road and Slope Set OutDocument10 pagesRoad and Slope Set OutWassan IdreesNo ratings yet
- Cadastral Survey: TraversingDocument25 pagesCadastral Survey: TraversingWassan IdreesNo ratings yet
- Resection methods for coordinate determinationDocument16 pagesResection methods for coordinate determinationWassan IdreesNo ratings yet
- Assignment of TimeDocument1 pageAssignment of TimeWassan IdreesNo ratings yet
- Cadastral Surveying: Regular and Irregular AreasDocument18 pagesCadastral Surveying: Regular and Irregular AreasWassan IdreesNo ratings yet
- Design File Type RUBDocument116 pagesDesign File Type RUBAbilaash VNo ratings yet
- Nexion 300 IcpmsDocument9 pagesNexion 300 IcpmsAhmad HamdounNo ratings yet
- Fiiij: DecemberDocument20 pagesFiiij: DecemberYashh GuptaNo ratings yet
- IG2 Thermal Physics Practice TestDocument5 pagesIG2 Thermal Physics Practice TestrehanNo ratings yet
- Separating Suspensions and ColloidsDocument11 pagesSeparating Suspensions and ColloidsGenna CuencaNo ratings yet
- Ansi Assp Z359 0 2023Document40 pagesAnsi Assp Z359 0 2023leonardoNo ratings yet
- Physics Notes Form 5Document221 pagesPhysics Notes Form 5tonikay219No ratings yet
- Dundu 2011Document15 pagesDundu 2011fahmi aballiNo ratings yet
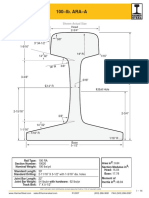
- 100 Lb-Yd ARA-ADocument1 page100 Lb-Yd ARA-ADario Bravo BordaNo ratings yet
- Chem 120 Exam ReviewDocument10 pagesChem 120 Exam ReviewRazan AliNo ratings yet
- Spare Part ListDocument645 pagesSpare Part ListJose luis VargasNo ratings yet
- Sedimentation: Engr. Nadeem Karim BhattiDocument23 pagesSedimentation: Engr. Nadeem Karim BhattiEngr Sarang Khan100% (1)
- XC2002 Brief Manual: ResetDocument6 pagesXC2002 Brief Manual: Resetعبدالمهيمن ميناNo ratings yet
- B628B Optimizing Descaling PDFDocument24 pagesB628B Optimizing Descaling PDFGunawan WibisonoNo ratings yet
- Mcs 021 Heat Emitter Guide For Domestic Heat Pumps Issue 21Document11 pagesMcs 021 Heat Emitter Guide For Domestic Heat Pumps Issue 21Denis DillaneNo ratings yet
- Flashcards - Topic 01 Atomic Structure and The Periodic Table - AQA Chemistry GCSEDocument137 pagesFlashcards - Topic 01 Atomic Structure and The Periodic Table - AQA Chemistry GCSEEva xuNo ratings yet
- Module 4 - PROPERTIES OF MATTERDocument11 pagesModule 4 - PROPERTIES OF MATTERJBM 0531No ratings yet
- GRIGNARD REAGENTS, REDUCTION & ALKANESDocument52 pagesGRIGNARD REAGENTS, REDUCTION & ALKANESPRIYANSHU KUMARNo ratings yet
- Gas Liquid Separator DesignDocument3 pagesGas Liquid Separator DesignSoheil MoradiNo ratings yet
- Friction of Threaded FastenersDocument13 pagesFriction of Threaded Fastenersmirosek100% (1)
- Types of Microscopes for Observing Cells & MicroorganismsDocument1 pageTypes of Microscopes for Observing Cells & Microorganismschloe annNo ratings yet
- Section 5 - PerformanceDocument124 pagesSection 5 - PerformanceflorentNo ratings yet
- Air Conditioning Psychrometry GuideDocument11 pagesAir Conditioning Psychrometry GuideShirley Pelagio100% (1)
- NORTHERN PARAMEDICAL AND TECHNOLOGICAL COLLEGE OF PANABO'S SCIENCE 10 EXAMDocument2 pagesNORTHERN PARAMEDICAL AND TECHNOLOGICAL COLLEGE OF PANABO'S SCIENCE 10 EXAMAgustin L. IdausosNo ratings yet
- 105mm Enhanced GunDocument38 pages105mm Enhanced Gungrindormh53100% (1)
- Effect of Ultrasonic Irradiation Treatment On Rheological BehaviourDocument17 pagesEffect of Ultrasonic Irradiation Treatment On Rheological BehaviourSOCRATESNo ratings yet
- 5th Sem SyllabusDocument19 pages5th Sem SyllabusRaimond RosarioNo ratings yet
- EMI & AC - Rudra SeriesDocument156 pagesEMI & AC - Rudra SeriesShubham AgarwalNo ratings yet
- UTeM Compressor TutorialDocument2 pagesUTeM Compressor Tutorialzul hilmiNo ratings yet
- Physica A: Tingting Gao, Yu ChenDocument8 pagesPhysica A: Tingting Gao, Yu ChenZoe RossiNo ratings yet