You might also like
- A-level Physics Revision: Cheeky Revision ShortcutsFrom EverandA-level Physics Revision: Cheeky Revision ShortcutsRating: 3 out of 5 stars3/5 (10)
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisFrom EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisRating: 4 out of 5 stars4/5 (2)
- Basics of Vibration Measurement: Amplitude, Frequency, PhaseDocument8 pagesBasics of Vibration Measurement: Amplitude, Frequency, PhaseAmmar Instrument100% (1)
- Basics Vibration MeasurementDocument5 pagesBasics Vibration MeasurementMohan Arumugavallal100% (1)
- CATs Vibration AnalysisDocument7 pagesCATs Vibration AnalysisJose RattiaNo ratings yet
- Advanced vibration analysis and elimination in a gear box and machine trainDocument25 pagesAdvanced vibration analysis and elimination in a gear box and machine trainsppramNo ratings yet
- Quadcopter SensorsDocument16 pagesQuadcopter SensorsSalahAL-Hakimi100% (1)
- VibrationDocument24 pagesVibrationDaniel Codina100% (1)
- Vibration Monitoring System-3500 PDFDocument27 pagesVibration Monitoring System-3500 PDFer_sanjaypatel100% (1)
- Balancing Theory 101 Version 2008Document63 pagesBalancing Theory 101 Version 2008Dee FormeeNo ratings yet
- Vibration Application DataDocument44 pagesVibration Application DataSaurabh PanditNo ratings yet
- The Science and Design of the Hybrid Rocket EngineFrom EverandThe Science and Design of the Hybrid Rocket EngineRating: 3 out of 5 stars3/5 (2)
- Practical Vibration Analysis GuideDocument57 pagesPractical Vibration Analysis GuideCarlos Alberto Angarita MaldonadoNo ratings yet
- Phase Analysis: How to Use Phase Readings to Diagnose FaultsDocument27 pagesPhase Analysis: How to Use Phase Readings to Diagnose FaultsShawn RuhlNo ratings yet
- Internet of Things With 8051 and ESP8266Document193 pagesInternet of Things With 8051 and ESP8266funkrocknow3826No ratings yet
- VibrationDocument63 pagesVibrationSiva Kumar Tutika100% (6)
- Vibration - Wikipedia, The Free EncyclopediaDocument7 pagesVibration - Wikipedia, The Free Encyclopediadidodido_67No ratings yet
- Financial Derivative and Energy Market Valuation: Theory and Implementation in MATLABFrom EverandFinancial Derivative and Energy Market Valuation: Theory and Implementation in MATLABRating: 3.5 out of 5 stars3.5/5 (1)
- Install Manual Accelerometer 542 Rev 4Document40 pagesInstall Manual Accelerometer 542 Rev 4esedgarNo ratings yet
- Vibration Monitoring System-3500Document27 pagesVibration Monitoring System-3500Sarah Frazier100% (1)
- Introduction To Impulse HammersDocument3 pagesIntroduction To Impulse HammersxxNo ratings yet
- Turbine Supervisory System TSIDocument39 pagesTurbine Supervisory System TSImgkvprNo ratings yet
- Phase AnalysisDocument28 pagesPhase AnalysisDeanna ScottNo ratings yet
- TECH WhatIsMobilityDocument4 pagesTECH WhatIsMobilityFazliJaafarNo ratings yet
- Mobility... A New Approach To Measuring Actual Forces in MachineryDocument4 pagesMobility... A New Approach To Measuring Actual Forces in Machineryho-faNo ratings yet
- vibrationDocument12 pagesvibrationavi kishuNo ratings yet
- Impulse and Continuous Vibration MeasurementDocument8 pagesImpulse and Continuous Vibration MeasurementMalick Sungu100% (1)
- Machine VibrationDocument18 pagesMachine VibrationBatha KhanNo ratings yet
- Vibrasi AnalisisDocument72 pagesVibrasi AnalisisyogacruiseNo ratings yet
- What Is VibrationDocument29 pagesWhat Is Vibrationravi_fdNo ratings yet
- Understanding and Using Dynamic Stiffness - A TutorialDocument11 pagesUnderstanding and Using Dynamic Stiffness - A TutorialNaba Raj ShresthaNo ratings yet
- Handouts On DOMDocument10 pagesHandouts On DOMGitanj ShethNo ratings yet
- Vibration Basics PDFDocument11 pagesVibration Basics PDFGanseh100% (1)
- Torque Theory and ApplicationsDocument5 pagesTorque Theory and ApplicationsPoison PinkNo ratings yet
- Vibration Monitoring SystemDocument27 pagesVibration Monitoring SystemsumaNo ratings yet
- Vibration Measurement SimplifiedDocument15 pagesVibration Measurement SimplifiedYusman EkaNo ratings yet
- Vibration Measurement Techniques PDFDocument11 pagesVibration Measurement Techniques PDFKarthik Sriramakavacham100% (1)
- Vibration Measurement Techniques BasicsDocument11 pagesVibration Measurement Techniques Basicstohema100% (1)
- What Is Vibration ?Document10 pagesWhat Is Vibration ?SatNo ratings yet
- A Review of Design of Shock Absorber Test RigDocument5 pagesA Review of Design of Shock Absorber Test Rigrahul.yerrawarNo ratings yet
- ACCELEROMETERS MEASURE ACCELERATIONDocument6 pagesACCELEROMETERS MEASURE ACCELERATIONByronSaumettNo ratings yet
- Lec10 Vibratiob ControlDocument35 pagesLec10 Vibratiob Controlodzew1826No ratings yet
- Study of Vibration - Power-MI: Aug 21, 2023 2:13 PMDocument13 pagesStudy of Vibration - Power-MI: Aug 21, 2023 2:13 PMabdalla AljzNo ratings yet
- Basics of AC Drives - 1Document104 pagesBasics of AC Drives - 1Vaibhav ChughNo ratings yet
- Mechanic Experi̇mentsDocument26 pagesMechanic Experi̇mentsCANGONo ratings yet
- Lec 10Document26 pagesLec 10Adeoti OladapoNo ratings yet
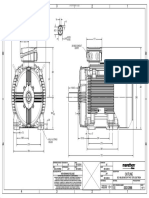
- SW Drawing - SS312998 - A - 2361111 - 345 Motor MarathonDocument1 pageSW Drawing - SS312998 - A - 2361111 - 345 Motor Marathonvictor perdomoNo ratings yet
- Catalogo SealmasterDocument264 pagesCatalogo Sealmastervictor perdomoNo ratings yet
- Tools For The Mechanical Mounting and Dismounting of Rolling BearingsDocument1 pageTools For The Mechanical Mounting and Dismounting of Rolling Bearingsvictor perdomoNo ratings yet
- Calculo Transmision VPDocument1 pageCalculo Transmision VPvictor perdomoNo ratings yet
- Article - TCA0222AE211GAA009 - DataPack - 9 Motor Marathon Don PabloDocument6 pagesArticle - TCA0222AE211GAA009 - DataPack - 9 Motor Marathon Don Pablovictor perdomoNo ratings yet
- TKSA 51 Quick Start ESDocument6 pagesTKSA 51 Quick Start ESAlvaroNo ratings yet
- Tools For The Mechanical Mounting and Dismounting of Rolling BearingsDocument1 pageTools For The Mechanical Mounting and Dismounting of Rolling Bearingsvictor perdomoNo ratings yet
- Split Eye Flange YokeDocument1 pageSplit Eye Flange Yokevictor perdomoNo ratings yet
- Split Eye Flange YokeDocument1 pageSplit Eye Flange Yokevictor perdomoNo ratings yet
- SKF MicrologDocument52 pagesSKF MicrologJeffry KarundengNo ratings yet
- Tools For The Mechanical Mounting and Dismounting of Rolling BearingsDocument1 pageTools For The Mechanical Mounting and Dismounting of Rolling Bearingsvictor perdomoNo ratings yet
- Technical Manual Ribbed Belt Drives: OptibeltDocument68 pagesTechnical Manual Ribbed Belt Drives: Optibeltvictor perdomoNo ratings yet
- Kop-Grid Couplings: Table No. 4 Kop-Grid Couplings - Hubs, Grid, Cover, Seal and Fastener KitsDocument2 pagesKop-Grid Couplings: Table No. 4 Kop-Grid Couplings - Hubs, Grid, Cover, Seal and Fastener Kitsvictor perdomoNo ratings yet
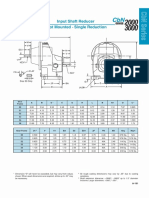
- CBN 30-35 Single ReductionDocument1 pageCBN 30-35 Single Reductionvictor perdomoNo ratings yet
- Lagd 125 - HHT26Document1 pageLagd 125 - HHT26victor perdomoNo ratings yet
- SKF DialSet - Relubrication Calculation Program - v6.1Document1 pageSKF DialSet - Relubrication Calculation Program - v6.1victor perdomoNo ratings yet
- en Y-Bearing and Y-B UnitsDocument262 pagesen Y-Bearing and Y-B UnitsJosé Del Orbe GarcíaNo ratings yet
- M451-110 - Falk Lifelign Gear CouplingsDocument62 pagesM451-110 - Falk Lifelign Gear CouplingsLee LaiHaaNo ratings yet
- SKF Couplings Catalogue PDFDocument19 pagesSKF Couplings Catalogue PDFvictor perdomoNo ratings yet
- Optibelt Technical Manual PulleysDocument2 pagesOptibelt Technical Manual Pulleysvictor perdomoNo ratings yet
- Rodamientos Inoxidables SKFDocument36 pagesRodamientos Inoxidables SKFvictor perdomoNo ratings yet
- Applicability of Smartphone For Dynamic Postural Stability EvaluationDocument7 pagesApplicability of Smartphone For Dynamic Postural Stability EvaluationMonica ViverosNo ratings yet
- GestureDocument6 pagesGestureKelappan NairNo ratings yet
- Ajay ChauhanDocument18 pagesAjay ChauhanAjay ChauhanNo ratings yet
- The Art & Science of GreatDocument20 pagesThe Art & Science of GreathgfhfghfghgNo ratings yet
- Industrial Robot Sensors Enable Non-Structured EnvironmentsDocument92 pagesIndustrial Robot Sensors Enable Non-Structured EnvironmentsGoutham Mareeswaran B100% (1)
- Rolls-Royce FFCPT BrochureDocument4 pagesRolls-Royce FFCPT Brochuretjsprang100% (1)
- CM3032 EN Using CMVA 55 Microlog To Check DC Bias Voltage 070811Document2 pagesCM3032 EN Using CMVA 55 Microlog To Check DC Bias Voltage 070811Oleg1142No ratings yet
- The Pipe Crawler: Eiki Martinson Mark Miller Sheraz WasiDocument39 pagesThe Pipe Crawler: Eiki Martinson Mark Miller Sheraz WasiMuhammed Abo-FandoodNo ratings yet
- Colibrys Paper Ieee Plans 16Document7 pagesColibrys Paper Ieee Plans 16Jayasuryaa G RNo ratings yet
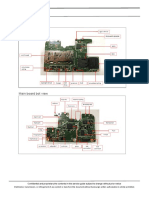
- 08-SM-A107 Tshoo 7 PDFDocument20 pages08-SM-A107 Tshoo 7 PDFSmartFix agudeloNo ratings yet
- dt0097 Setting Up 6d Orientation Detection With Sts Mems Accelerometers StmicroelectronicsDocument9 pagesdt0097 Setting Up 6d Orientation Detection With Sts Mems Accelerometers StmicroelectronicsPatrickNo ratings yet
- Imu PDFDocument2 pagesImu PDFMarcos MarínNo ratings yet
- Real-time Earthquake Damage Assessment Using CAVDocument5 pagesReal-time Earthquake Damage Assessment Using CAVRafael_YevgenyNo ratings yet
- ProposalDocument6 pagesProposaltyphu40No ratings yet
- Sensor PDFDocument8 pagesSensor PDFConstanzaNo ratings yet
- A Method of Low-Cost IMU Calibration and AlignmentDocument6 pagesA Method of Low-Cost IMU Calibration and AlignmentAerojet Rocketdyne RS-25No ratings yet
- Metrix Product Range BrochureDocument12 pagesMetrix Product Range BrochureMarco AntonioNo ratings yet
- Accelerated Fatigue Testing of BladesDocument73 pagesAccelerated Fatigue Testing of BladesmechnareshNo ratings yet
- Ts 1000 TBDocument28 pagesTs 1000 TBFdfasdfNo ratings yet
- Datasheet Episensor Es U2 Force Balance Accelerometer KinemetricsDocument2 pagesDatasheet Episensor Es U2 Force Balance Accelerometer KinemetricssimonjmorNo ratings yet
- PCB - Sensor PDFDocument180 pagesPCB - Sensor PDFMounicaRasagyaPallaNo ratings yet
- University of Calgary: New Measurement-While-Drilling Surveying Technique Utilizing Sets of Fiber Optic Rotation SensorsDocument289 pagesUniversity of Calgary: New Measurement-While-Drilling Surveying Technique Utilizing Sets of Fiber Optic Rotation SensorsJames ConnerNo ratings yet
- ABB MACHsense-R ManualDocument22 pagesABB MACHsense-R ManualNoname_user989No ratings yet
- TC51 and TC56 Touch ComputerDocument4 pagesTC51 and TC56 Touch Computerlouer sur AirbnbNo ratings yet
- Specifications Features: AE-DC2018-K2Document1 pageSpecifications Features: AE-DC2018-K2Andrés FernándezNo ratings yet