You might also like
- Emir Can Yılmaz 200304052 DYNAMIC VIBRATION ABSORBERDocument6 pagesEmir Can Yılmaz 200304052 DYNAMIC VIBRATION ABSORBERCANGONo ratings yet
- Dynamic Vibration AbsorberDocument6 pagesDynamic Vibration AbsorberCANGONo ratings yet
- Introduction to Shock & Vibration FundamentalsDocument34 pagesIntroduction to Shock & Vibration Fundamentalskostarica123100% (1)
- 08 VibrationDocument10 pages08 VibrationAisha Zaheer0% (1)
- Vibration MeasurementDocument23 pagesVibration MeasurementAxenta100% (2)
- VibrationsDocument93 pagesVibrationsbislerinit86% (7)
- MMAN2300 VibrationDocument22 pagesMMAN2300 VibrationAl Chemist ShahedNo ratings yet
- Chapter 1. - Introduction To VibrationsDocument14 pagesChapter 1. - Introduction To Vibrationstekitech443No ratings yet
- Vibrating Beam Lab ReportDocument13 pagesVibrating Beam Lab ReportSteven Giffney100% (1)
- Vibration - Wikipedia, The Free EncyclopediaDocument7 pagesVibration - Wikipedia, The Free Encyclopediadidodido_67No ratings yet
- TMP-712 Presentation - Farm Machinery DyamicsDocument70 pagesTMP-712 Presentation - Farm Machinery DyamicsVishnu Ji AwasthiNo ratings yet
- MofeedDocument22 pagesMofeedIsmailNo ratings yet
- Mechanics of Machines Iii-Final Course MaterialsDocument39 pagesMechanics of Machines Iii-Final Course MaterialsKaren DavisNo ratings yet
- 02 Unit II Vibration Nomograph Vibration Control 04 02 2017 Student and TeachersDocument14 pages02 Unit II Vibration Nomograph Vibration Control 04 02 2017 Student and TeachersKanishk Mehta100% (1)
- Vibration Theory: Periodic MotionDocument9 pagesVibration Theory: Periodic MotionVasile RaduNo ratings yet
- Exp 3 Force Vibration (Finalized)Document33 pagesExp 3 Force Vibration (Finalized)Fakhrur Razi67% (6)
- Vibrations SyllabusDocument5 pagesVibrations SyllabusAli SabahNo ratings yet
- Basic Principles of VibrationsDocument6 pagesBasic Principles of Vibrationsdskumar49No ratings yet
- Intro VibrationDocument61 pagesIntro VibrationSameer ShashwatNo ratings yet
- Determine Natural Frequency of Spring-Dashpot SystemDocument21 pagesDetermine Natural Frequency of Spring-Dashpot SystemneenoonaaNo ratings yet
- CH 01, Introduction To Mechanical VibrationsDocument35 pagesCH 01, Introduction To Mechanical VibrationsAtalelew ZeruNo ratings yet
- ME3112 E5 Lab ReportDocument9 pagesME3112 E5 Lab ReportKendrick TanNo ratings yet
- ME146-2 VIBRATION ENGINEERING REVIEW QUESTIONSDocument5 pagesME146-2 VIBRATION ENGINEERING REVIEW QUESTIONSCount AechNo ratings yet
- Week 1 Vibration IntroductionDocument22 pagesWeek 1 Vibration IntroductionSaya SantornoNo ratings yet
- Mechanical Vibrations (3) : July 2017Document94 pagesMechanical Vibrations (3) : July 2017nataraj deshpandeNo ratings yet
- VibrationDocument24 pagesVibrationDaniel Codina100% (1)
- Vibration Analysis and Modelling of A Cantilever Beam: January 2019Document28 pagesVibration Analysis and Modelling of A Cantilever Beam: January 2019Deepak SahNo ratings yet
- MEASURING VIBRATION & DISPLACEMENTDocument6 pagesMEASURING VIBRATION & DISPLACEMENTSatNo ratings yet
- Dynamic Lab ReportDocument6 pagesDynamic Lab ReportKamal ShayedNo ratings yet
- Basic Terminology in VibrationsDocument10 pagesBasic Terminology in VibrationsJuhi Singh100% (1)
- Exp 3+4Document7 pagesExp 3+4abdul rehmanNo ratings yet
- Assignment 2 Module of Free Vibration Engineering 1st SEMESTER S.Y. 2016 - 2017Document14 pagesAssignment 2 Module of Free Vibration Engineering 1st SEMESTER S.Y. 2016 - 2017Narry StrummerNo ratings yet
- Mechanical Vibration 2 Marks Questions With Answer: 1. What Is Meant by Vibrations?Document5 pagesMechanical Vibration 2 Marks Questions With Answer: 1. What Is Meant by Vibrations?Mahendra PathakNo ratings yet
- Dynamic Force Analysis & Vibration in Machines Workshop at KauveryDocument132 pagesDynamic Force Analysis & Vibration in Machines Workshop at KauveryMoorthy GovindarajNo ratings yet
- Control of Natural FrequencyDocument11 pagesControl of Natural FrequencyMoHammadNashatSabbahNo ratings yet
- Chapter 1Document116 pagesChapter 1muhammad azwan zul-kifleyNo ratings yet
- Cat II Course PDFDocument153 pagesCat II Course PDFMohammad Zainullah Khan100% (2)
- Pedotti2016 PDFDocument6 pagesPedotti2016 PDFbekhouche nasreddineNo ratings yet
- Learning Objectives: Chapter One Vibration of Machinery and Fundamental ConceptsDocument9 pagesLearning Objectives: Chapter One Vibration of Machinery and Fundamental ConceptsOluwajuwon AdenugbaNo ratings yet
- College of Technology - Riyadh: Kingdom of Saudi ArabiaDocument87 pagesCollege of Technology - Riyadh: Kingdom of Saudi Arabiamohamed fattal100% (1)
- Mechanical VibrationDocument72 pagesMechanical VibrationMuhammadNasir100% (1)
- Lecture 5Document52 pagesLecture 5Wbamlak AshebrNo ratings yet
- Vibration Measurements Enotes1Document10 pagesVibration Measurements Enotes1NAYEEMNo ratings yet
- Experimental Modal AnalysisDocument11 pagesExperimental Modal Analysisrs0004No ratings yet
- Guide engine dynamics vibrationDocument6 pagesGuide engine dynamics vibrationabm2281999No ratings yet
- Vibration 2Document8 pagesVibration 2raymark deguzman100% (3)
- Chapter One: 1.1 Basic Concepts of VibrationDocument6 pagesChapter One: 1.1 Basic Concepts of VibrationShuguta LatiNo ratings yet
- VIBRATIONS AND ELEMENTS OF AERO ELASTICITYDocument6 pagesVIBRATIONS AND ELEMENTS OF AERO ELASTICITYSathya NarayananNo ratings yet
- SDOFDocument107 pagesSDOFMohammed B TuseNo ratings yet
- Ch1 Introduction to VibrationDocument75 pagesCh1 Introduction to Vibrationhailegebreselassie24No ratings yet
- Analysis of Vibration in Rotary Equipment: B. R. Aravindh Raj & P. JeyaramanDocument10 pagesAnalysis of Vibration in Rotary Equipment: B. R. Aravindh Raj & P. JeyaramanTJPRC PublicationsNo ratings yet
- 1075-4643 - Lecture Notes Chapter 1Document9 pages1075-4643 - Lecture Notes Chapter 1Mottalab ShaonNo ratings yet
- Vibrations of Power Plant Machines: A Guide for Recognition of Problems and TroubleshootingFrom EverandVibrations of Power Plant Machines: A Guide for Recognition of Problems and TroubleshootingNo ratings yet
- Negative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 3: Gravitational and Inertial Control, #3From EverandNegative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 3: Gravitational and Inertial Control, #3No ratings yet
- Negative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 4: Gravitational and Inertial Control, #4From EverandNegative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 4: Gravitational and Inertial Control, #4No ratings yet
- Emir Can Yılmaz 200304052 Material ReportDocument26 pagesEmir Can Yılmaz 200304052 Material ReportCANGONo ratings yet
- Theoretical Analysis and Experimental Study On The P - 2022 - Case Studies in THDocument16 pagesTheoretical Analysis and Experimental Study On The P - 2022 - Case Studies in THDaniel RodríguezNo ratings yet
- Energy Experiment II Heat Pump Emir Can Yılmaz 200304052Document11 pagesEnergy Experiment II Heat Pump Emir Can Yılmaz 200304052CANGONo ratings yet
- Emir Can Yılmaz 200304052 VibrationsofthinslenderbeamsDocument6 pagesEmir Can Yılmaz 200304052 VibrationsofthinslenderbeamsCANGONo ratings yet
- METALOGRAPHYDocument9 pagesMETALOGRAPHYCANGONo ratings yet
- Distributor Stock List PartsDocument3 pagesDistributor Stock List PartsGerardo MaciasNo ratings yet
- tdb4 U200Document3 pagestdb4 U200bansalrNo ratings yet
- Fluid - Mechanics Kundu 2012 5th PDFDocument3 pagesFluid - Mechanics Kundu 2012 5th PDFSergioNo ratings yet
- 3 Phase ApplicationDocument5 pages3 Phase ApplicationIwan BaeNo ratings yet
- Transformer Failure InvestigationDocument5 pagesTransformer Failure InvestigationVishal Mahire100% (2)
- Hsslive XI Physics ResonanceColumn1Document1 pageHsslive XI Physics ResonanceColumn1Saajan MaharjanNo ratings yet
- UT Dallas Syllabus For Phys2326.501.09s Taught by Yuri Gartstein (Yxg037000)Document5 pagesUT Dallas Syllabus For Phys2326.501.09s Taught by Yuri Gartstein (Yxg037000)UT Dallas Provost's Technology GroupNo ratings yet
- Class 9 Motion - Print - QuizizzDocument6 pagesClass 9 Motion - Print - QuizizzVenkateswara Rao DoodalaNo ratings yet
- Integrating Wind: 9 AC Networks I: Phasors and ImpedanceDocument36 pagesIntegrating Wind: 9 AC Networks I: Phasors and Impedanceaaroncete14No ratings yet
- BOREHOLE 6 PROJECT ELECTRICAL INSTALLATION FLOOR PLANDocument1 pageBOREHOLE 6 PROJECT ELECTRICAL INSTALLATION FLOOR PLANbekeleNo ratings yet
- April 15 Homework Solutions: Mechanical Engineering 390 Fluid MechanicsDocument6 pagesApril 15 Homework Solutions: Mechanical Engineering 390 Fluid MechanicsRONALD VILCA CACERESNo ratings yet
- CO2 Effects On Ultrasonic MetersDocument6 pagesCO2 Effects On Ultrasonic MetersTeamautomationnorth MeasurementNo ratings yet
- LC Filter For Three Phase Inverter: PSG College of TechnologyDocument24 pagesLC Filter For Three Phase Inverter: PSG College of TechnologyMuthuRajNo ratings yet
- Systematic and Random ErrorsDocument19 pagesSystematic and Random ErrorsБейбарыс КиякбаевNo ratings yet
- AHU OQ & PQ DocumentDocument12 pagesAHU OQ & PQ DocumentAnurag KumbhareNo ratings yet
- Resistor ManualDocument28 pagesResistor ManualKalidass BackNo ratings yet
- Dynamics - Kinematics 1 PDFDocument11 pagesDynamics - Kinematics 1 PDFChuck Dave DiazNo ratings yet
- Iecex Certificate of ConformityDocument5 pagesIecex Certificate of Conformityaz marine servicesNo ratings yet
- PRO LCD C Series InverterDocument4 pagesPRO LCD C Series InverterJuan SanchezNo ratings yet
- Chapter 6: Momentum Analysis of Flow Systems: Eric G. PatersonDocument16 pagesChapter 6: Momentum Analysis of Flow Systems: Eric G. PatersonIan RidzuanNo ratings yet
- Ic Op-Amp Ha 17741Document19 pagesIc Op-Amp Ha 17741evhyajahNo ratings yet
- 1227 Gee MK - IiDocument64 pages1227 Gee MK - Iiinbox934No ratings yet
- Calculating Dew Points from Gas CompositionDocument1 pageCalculating Dew Points from Gas CompositionNKNo ratings yet
- Activity No. 4Document7 pagesActivity No. 4Mary Ingrid BumatayNo ratings yet
- CapacitanceDocument71 pagesCapacitanceTharaj ThajNo ratings yet
- SCX-DCX SXM-DXM NT Eng 50hz 60hzDocument28 pagesSCX-DCX SXM-DXM NT Eng 50hz 60hzAndré Marcelo DiasNo ratings yet
- Air Core ReactorsDocument6 pagesAir Core Reactorsalberto zapataNo ratings yet
- Electron Liquid Properties and Excitations in Solid State PhysicsDocument62 pagesElectron Liquid Properties and Excitations in Solid State Physicslufer0528No ratings yet
- Hyundai AcbDocument72 pagesHyundai AcbASRUL HELMINo ratings yet
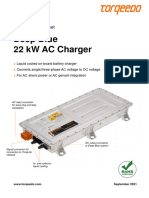
- Torqeedo Data Sheet 22kwcharger 202111Document2 pagesTorqeedo Data Sheet 22kwcharger 202111cristianNo ratings yet