
You might also like
- B-29 “Double Trouble” Is “Mister Bee”: Radar Photography of and Bombing Japan During World War II My North Carolinian Father in the Crew of the "Lone B-29" Boeing Superfortress Bomber Flying the Longest Nonstop Combat Mission of World War IIFrom EverandB-29 “Double Trouble” Is “Mister Bee”: Radar Photography of and Bombing Japan During World War II My North Carolinian Father in the Crew of the "Lone B-29" Boeing Superfortress Bomber Flying the Longest Nonstop Combat Mission of World War IINo ratings yet
- Air-Ground Teamwork On The Western Front - The Role Of The XIX Tactical Air Command During August 1944: [Illustrated Edition]From EverandAir-Ground Teamwork On The Western Front - The Role Of The XIX Tactical Air Command During August 1944: [Illustrated Edition]No ratings yet
- Two Worlds Collide: A richly illustrated true story of the Arctic Convoys and the German submariners in WW2From EverandTwo Worlds Collide: A richly illustrated true story of the Arctic Convoys and the German submariners in WW2No ratings yet
- Eighth Army: El Alamein To The River Sangro [Illustrated Edition]From EverandEighth Army: El Alamein To The River Sangro [Illustrated Edition]No ratings yet
- History of the 91st Aero Squadron Air Service U.S.A. (WWI Centenary Series)From EverandHistory of the 91st Aero Squadron Air Service U.S.A. (WWI Centenary Series)No ratings yet
- Bluie West One: Secret Mission to Greenland, July 1941 — The Building of an American Air Force BaseFrom EverandBluie West One: Secret Mission to Greenland, July 1941 — The Building of an American Air Force BaseNo ratings yet
- Log of World War Ii: a Pacific Naval Diary: As Recorded by Vincent Evo Decook Yeoman Second Class U.S.S. MinneapolisFrom EverandLog of World War Ii: a Pacific Naval Diary: As Recorded by Vincent Evo Decook Yeoman Second Class U.S.S. MinneapolisNo ratings yet
- Nightstalkers: The Wright Project and the 868th Bomb Squadron in World War IIFrom EverandNightstalkers: The Wright Project and the 868th Bomb Squadron in World War IINo ratings yet
- Discovering my Father: The Wartime Experiences of Squadron Leader John Russell Collins DFC and Bar (1943-1944)From EverandDiscovering my Father: The Wartime Experiences of Squadron Leader John Russell Collins DFC and Bar (1943-1944)No ratings yet
- 1 10Document64 pages1 10rkschedelNo ratings yet
- Wings of Gold: An Account of Naval Aviation Training in World War II, The Correspondence of Aviation Cadet/Ensign Robert R. ReaFrom EverandWings of Gold: An Account of Naval Aviation Training in World War II, The Correspondence of Aviation Cadet/Ensign Robert R. ReaNo ratings yet
- Operation Colossus: The First British Airborne Raid of World War IIFrom EverandOperation Colossus: The First British Airborne Raid of World War IINo ratings yet
- AFRIKA KORPS Errata - QADocument5 pagesAFRIKA KORPS Errata - QAResearcher0415No ratings yet
- Attack at Taranto, The Tactical SuccessDocument25 pagesAttack at Taranto, The Tactical SuccessMalvaasNo ratings yet
- CMH - Pub - 10-17 Signal Corps - The Test PDFDocument637 pagesCMH - Pub - 10-17 Signal Corps - The Test PDFGavin HardieNo ratings yet
- Why Gallipoli Matters: Interpreting Different Lessons From HistoryFrom EverandWhy Gallipoli Matters: Interpreting Different Lessons From HistoryNo ratings yet
- Fight for the Air: Aviation Adventures from the Second World WarFrom EverandFight for the Air: Aviation Adventures from the Second World WarNo ratings yet
- Radar A Case History of An InventionDocument130 pagesRadar A Case History of An InventionVijay Kumar100% (1)
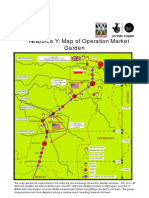
- RESOURCE Y Map of Operation Market GardenDocument1 pageRESOURCE Y Map of Operation Market Gardendavidayre1234No ratings yet
- After Jutland: The Naval War in Northern European Waters, June 1916–November 1918From EverandAfter Jutland: The Naval War in Northern European Waters, June 1916–November 1918No ratings yet
- YPRES 1914: An Official Account Published By Order Of The German General StaffFrom EverandYPRES 1914: An Official Account Published By Order Of The German General StaffNo ratings yet
- America's Few: Marine Aces of the South PacificFrom EverandAmerica's Few: Marine Aces of the South PacificRating: 3.5 out of 5 stars3.5/5 (2)
- “Elbe Operation” - With 2d Armored Division & 83d Infantry DivisionsFrom Everand“Elbe Operation” - With 2d Armored Division & 83d Infantry DivisionsNo ratings yet
- Royal Hungarian ParatroopersDocument3 pagesRoyal Hungarian ParatroopersVanja2106100% (1)
- The Story of the Great War, Volume 2 History of the European War from Official SourcesFrom EverandThe Story of the Great War, Volume 2 History of the European War from Official SourcesNo ratings yet
- Ironside: The Authorised Biography of Field Marshal Lord IronsideFrom EverandIronside: The Authorised Biography of Field Marshal Lord IronsideNo ratings yet
- World War One Naval Battles in South American WatersFrom EverandWorld War One Naval Battles in South American WatersNo ratings yet
- Anti Aircraft WarfareDocument21 pagesAnti Aircraft Warfaresorin birouNo ratings yet
- Military Review May 1943Document99 pagesMilitary Review May 1943CAP History LibraryNo ratings yet
- General Eisenhower’s Battle For Control Of The Strategic Bombers In Support Of Operation OverlordFrom EverandGeneral Eisenhower’s Battle For Control Of The Strategic Bombers In Support Of Operation OverlordNo ratings yet
- Breakthrough: The Epic Story of the Battle of the Bulge: The Greatest Pitched Battle in America’s HistoryFrom EverandBreakthrough: The Epic Story of the Battle of the Bulge: The Greatest Pitched Battle in America’s HistoryNo ratings yet
- War's Nomads: A Mobile Radar Unit in Pursuit of Rommel during the Western Desert Campaign, 1942–3From EverandWar's Nomads: A Mobile Radar Unit in Pursuit of Rommel during the Western Desert Campaign, 1942–3No ratings yet
- Messerschmitts Over Sicily: A German Fighter Commander in World War IIFrom EverandMesserschmitts Over Sicily: A German Fighter Commander in World War IIRating: 3.5 out of 5 stars3.5/5 (7)
- Airborne Command HistoryDocument149 pagesAirborne Command HistoryGlenn StoverNo ratings yet
- Battle of The BulgeDocument26 pagesBattle of The Bulgemnbvcxz_No ratings yet
- From Salerno To Rome: General Mark W. Clark And The Challenges Of Coalition WarfareFrom EverandFrom Salerno To Rome: General Mark W. Clark And The Challenges Of Coalition WarfareNo ratings yet
- To Wake Island and Beyond ReminiscencesDocument151 pagesTo Wake Island and Beyond ReminiscencesBob AndrepontNo ratings yet
- The Vanguard Of American Volunteers In The Fighting Lines And In Humanitarian Service: August,1914-April, 1917 [Illustrated Edition]From EverandThe Vanguard Of American Volunteers In The Fighting Lines And In Humanitarian Service: August,1914-April, 1917 [Illustrated Edition]No ratings yet
- XIX Tactical Air Command And Ultra - Patton’s Force Enhancers In The 1944 Campaign In FranceFrom EverandXIX Tactical Air Command And Ultra - Patton’s Force Enhancers In The 1944 Campaign In FranceNo ratings yet
- General Ballak and Von Melentin On TacticDocument46 pagesGeneral Ballak and Von Melentin On TacticLanges George KdfsNo ratings yet
- Retreat through the Rhone Valley: Defensive battles of the Nineteenth Army, August–September 1944From EverandRetreat through the Rhone Valley: Defensive battles of the Nineteenth Army, August–September 1944No ratings yet
- Royal Navy Fifth Destroyer Flotilla in WWI MediterraneanDocument26 pagesRoyal Navy Fifth Destroyer Flotilla in WWI MediterraneanMel SpenceNo ratings yet
- THE CAPTURE of MAKIN (20 - 24 November 1943) [Illustrated Edition]From EverandTHE CAPTURE of MAKIN (20 - 24 November 1943) [Illustrated Edition]No ratings yet
- Battle of the Atlantic: Gauntlet to VictoryFrom EverandBattle of the Atlantic: Gauntlet to VictoryRating: 4.5 out of 5 stars4.5/5 (4)
- Joss Husky Operation Plans Sicily, Italy P 1Document92 pagesJoss Husky Operation Plans Sicily, Italy P 1a.la_pica2161No ratings yet
- The Vietnamese Air Force, 1951-1975 — An Analysis Of Its Role In Combat And Fourteen Hours At Koh Tang [Illustrated Edition]From EverandThe Vietnamese Air Force, 1951-1975 — An Analysis Of Its Role In Combat And Fourteen Hours At Koh Tang [Illustrated Edition]No ratings yet
- Jap Kamikazi Copy of Ww2-31 Kami On NatterDocument6 pagesJap Kamikazi Copy of Ww2-31 Kami On NatterJF221600No ratings yet
- Estratègia Contra La Covid-19Document18 pagesEstratègia Contra La Covid-19Moderador Noticies WebNo ratings yet
- Peugeot 307 Wiring DiagramDocument9 pagesPeugeot 307 Wiring DiagramAnonymous OFfJVrQY691% (23)
- Peugeot 307 Wiring DiagramDocument9 pagesPeugeot 307 Wiring DiagramAnonymous OFfJVrQY691% (23)
- Peugeot 307 Wiring DiagramDocument9 pagesPeugeot 307 Wiring DiagramAnonymous OFfJVrQY691% (23)
- Manual Alarma Modelo 515 SKDocument2 pagesManual Alarma Modelo 515 SKjuancmerchan76% (17)
- Diagbox InstallDocument27 pagesDiagbox InstallJuan Diaz100% (1)
- READMEDocument1 pageREADMEJuan DiazNo ratings yet
- ArchDisChild - 2006v91 - Optimising Management in Turner Syndrome - From InfancyDocument8 pagesArchDisChild - 2006v91 - Optimising Management in Turner Syndrome - From InfancyJuan DiazNo ratings yet
- InterviewDocument3 pagesInterviewNaniNo ratings yet
- 11.CSEC Maths JUNE 2009 PDFDocument29 pages11.CSEC Maths JUNE 2009 PDFnatasha fNo ratings yet
- Learning Segment-And 5 Day Lesson Plan TemplateDocument7 pagesLearning Segment-And 5 Day Lesson Plan Templateapi-438417920No ratings yet
- Pergamon: Mech. Math. Theory Vol. 31, No. 4, Pp. 501-511, 1996Document11 pagesPergamon: Mech. Math. Theory Vol. 31, No. 4, Pp. 501-511, 1996AYA OUEZGANNo ratings yet
- Concept and Calculation of Experimental VariogramDocument37 pagesConcept and Calculation of Experimental VariogramsisiNo ratings yet
- MCE 3513 Machine Elements Mechanisms Lab ReportDocument13 pagesMCE 3513 Machine Elements Mechanisms Lab ReportAjay SambojuNo ratings yet
- CTQ 03 - Vector IIDocument4 pagesCTQ 03 - Vector IIrathoredeependrasingh254No ratings yet
- Third Periodical Test in Mathematics 7Document3 pagesThird Periodical Test in Mathematics 7Gemarie CabelaNo ratings yet
- Assignmt REMEDIALDocument16 pagesAssignmt REMEDIALrisliNo ratings yet
- 13 Modelling With Inverse Trigonometric FunctionsDocument19 pages13 Modelling With Inverse Trigonometric FunctionsLeigh YahNo ratings yet
- Mathematics n2 August Question Paper 2021Document9 pagesMathematics n2 August Question Paper 2021Dennis Mbegabolawe100% (1)
- 07 01ChapGere PDFDocument14 pages07 01ChapGere PDFAfoldoNo ratings yet
- Setting Out of CurveDocument19 pagesSetting Out of CurveshujaNo ratings yet
- Trigonometry To Find Angle MeasuresDocument4 pagesTrigonometry To Find Angle MeasuresAndreana McQueenNo ratings yet
- Lec9AuxiliaryViews 1Document21 pagesLec9AuxiliaryViews 1attaurrehmanNo ratings yet
- 2d Xray PDFDocument8 pages2d Xray PDFShivam VinothNo ratings yet
- Ex03 05 WorksheetDocument4 pagesEx03 05 Worksheetdrag600No ratings yet
- Understanding Location: Absolute vs RelativeDocument14 pagesUnderstanding Location: Absolute vs Relativemariegold mortola fabelaNo ratings yet
- Angle MeasuresDocument29 pagesAngle MeasuresMary Joy LascuñaNo ratings yet
- Switchback DesignDocument12 pagesSwitchback DesignDzaki GunawanNo ratings yet
- Tutorial Sheet No.4: Survey CalculationsDocument11 pagesTutorial Sheet No.4: Survey CalculationshkaqlqNo ratings yet
- Cambridge IGCSE: PHYSICS 0625/62Document12 pagesCambridge IGCSE: PHYSICS 0625/62yuNo ratings yet
- Darcy S Law and The Field Equations of The Flow of Underground FluidsDocument38 pagesDarcy S Law and The Field Equations of The Flow of Underground FluidsAnonymous BVbpSENo ratings yet
- CIRCLES (Central Angles, Arcs and Chords)Document5 pagesCIRCLES (Central Angles, Arcs and Chords)Emyren ApuyaNo ratings yet
- B. Tech II Year (Civil) BCE 12: Basic Surveying: Tutorial Sheet-1-4Document4 pagesB. Tech II Year (Civil) BCE 12: Basic Surveying: Tutorial Sheet-1-4Utkarsh ChaudharyNo ratings yet
- Optical Calculations With Automatic Computing MachineryDocument6 pagesOptical Calculations With Automatic Computing Machinerywulunzhe1208No ratings yet
- Referencia Salama API Rp14Document138 pagesReferencia Salama API Rp14Silvina ZúñigaNo ratings yet
- 6e Math Web 0609Document20 pages6e Math Web 0609api-133774200No ratings yet
- DPP 02 -VECTORS WITH SOLUTIONDocument3 pagesDPP 02 -VECTORS WITH SOLUTIONShashwat KhuranaNo ratings yet
- A Simple Application of Stereographic Projection in The Measurement of Stratigraphic ThicknessDocument4 pagesA Simple Application of Stereographic Projection in The Measurement of Stratigraphic ThicknessDiego CastilloNo ratings yet
![Air-Ground Teamwork On The Western Front - The Role Of The XIX Tactical Air Command During August 1944: [Illustrated Edition]](https://imgv2-2-f.scribdassets.com/img/word_document/259895642/149x198/ac23a1ff63/1617227775?v=1)

![Eighth Army: El Alamein To The River Sangro [Illustrated Edition]](https://imgv2-2-f.scribdassets.com/img/word_document/293581066/149x198/8325f4e505/1617234266?v=1)














![Spitfire Pilot [Illustrated Edition]](https://imgv2-2-f.scribdassets.com/img/word_document/293579543/149x198/427679c218/1617234265?v=1)
























![The Vanguard Of American Volunteers In The Fighting Lines And In Humanitarian Service: August,1914-April, 1917 [Illustrated Edition]](https://imgv2-1-f.scribdassets.com/img/word_document/259893256/149x198/e468f7376c/1627937554?v=1)





![THE CAPTURE of MAKIN (20 - 24 November 1943) [Illustrated Edition]](https://imgv2-2-f.scribdassets.com/img/word_document/296217139/149x198/c97c0b5ccb/1617227360?v=1)


![The Vietnamese Air Force, 1951-1975 — An Analysis Of Its Role In Combat And Fourteen Hours At Koh Tang [Illustrated Edition]](https://imgv2-2-f.scribdassets.com/img/word_document/259900451/149x198/313b1d2918/1617227775?v=1)




































