You might also like
- 3412C Marine Engine High Performance 3JK00146-UP (SEBP2969 - 54) - Documentación PDFDocument29 pages3412C Marine Engine High Performance 3JK00146-UP (SEBP2969 - 54) - Documentación PDFmanuel100% (1)
- DTC P0101 Mass Air Flow Circuit Range / Performance Problem: DescriptionDocument3 pagesDTC P0101 Mass Air Flow Circuit Range / Performance Problem: Descriptioncarlos gil100% (1)
- Module Converter PWMDocument5 pagesModule Converter PWMJUAN JOSE VESGA RUEDANo ratings yet
- Powercom Commissioning Guideline PDFDocument34 pagesPowercom Commissioning Guideline PDFAnonymous wcBOwXpm100% (1)
- 66 KV Submarine Cable Systems For Offshore WindDocument20 pages66 KV Submarine Cable Systems For Offshore WindAnonymous 1AAjd0No ratings yet
- CAT ParalelingDocument68 pagesCAT ParalelingGabriel Paco LunaNo ratings yet
- Toyota Sensors Basic WaveformsDocument6 pagesToyota Sensors Basic Waveformscartronix2010100% (5)
- CAT - G3516H System Overview PDFDocument3 pagesCAT - G3516H System Overview PDFwagner_guimarães_1100% (1)
- Unit-5 Introduction To Avionic SystemDocument62 pagesUnit-5 Introduction To Avionic SystemVignesh Moorthy60% (5)
- Engine Monitoring System (G3516B)Document9 pagesEngine Monitoring System (G3516B)victor.cipriani100% (2)
- DIY Paper Airplane Instructions DownloadDocument2 pagesDIY Paper Airplane Instructions DownloadPauloHendrix100% (1)
- Troubleshooting 3412 4BZ PDFDocument18 pagesTroubleshooting 3412 4BZ PDFMounir SerguineNo ratings yet
- 60Hz - 50Hz Conversion Procedure C32Document13 pages60Hz - 50Hz Conversion Procedure C32Gustavo Pereira100% (1)
- Introduction of PowerCom Genset Controls for 320-625KVA NodesDocument8 pagesIntroduction of PowerCom Genset Controls for 320-625KVA NodesTaz UddinNo ratings yet
- For Approval: G3516A Engine Control Panel Banglacat LTDDocument71 pagesFor Approval: G3516A Engine Control Panel Banglacat LTDSreepriodas Roy75% (4)
- BP Approved Connection ListDocument10 pagesBP Approved Connection ListEDWIN M.PNo ratings yet
- 140h 5hm Pruebas y Ajustes de Transmision ElectronicaDocument28 pages140h 5hm Pruebas y Ajustes de Transmision ElectronicaSebastian Bonello100% (1)
- Volvo PentaDocument250 pagesVolvo Pentaweler13100% (2)
- Thomson Electrac HD Linear Actuator Motion Control per CAN BusFrom EverandThomson Electrac HD Linear Actuator Motion Control per CAN BusNo ratings yet
- 2G-3G-LTE - Priority Based Cell Reselection Strategy - 05012016Document12 pages2G-3G-LTE - Priority Based Cell Reselection Strategy - 05012016saifEEE010% (1)
- Ec5000 6-09 PDFDocument5 pagesEc5000 6-09 PDFAnonymous M0OEZEKoGiNo ratings yet
- The Cybersecurity Guide For LeadersDocument24 pagesThe Cybersecurity Guide For LeadersMahmood AlyNo ratings yet
- Control - Panel TJ 509T PDFDocument140 pagesControl - Panel TJ 509T PDFAnonymous V9fdC675% (12)
- Letter of AuthorizationDocument1 pageLetter of Authorizationjheny farneubunNo ratings yet
- Submittal - LS Power Chambersburg - G3096 - 5.15.20Document419 pagesSubmittal - LS Power Chambersburg - G3096 - 5.15.20kohatian27796105100% (2)
- DDT Full Operating Manual-1901600540621502Document85 pagesDDT Full Operating Manual-1901600540621502Sreepriodas Roy0% (1)
- Control Cummins Diesel EngineDocument8 pagesControl Cummins Diesel EngineAnkit Vyas100% (2)
- Load - Out Plan/Procedur E: Rev. Statu S Date Revision Memo Issuer Checker ApproverDocument18 pagesLoad - Out Plan/Procedur E: Rev. Statu S Date Revision Memo Issuer Checker ApproverLai Quoc100% (1)
- TFE 731 Chap 76Document42 pagesTFE 731 Chap 76Egor85100% (4)
- 7PCC1301Document20 pages7PCC1301gsantosh06100% (4)
- Toyota Motor Manufacturing IncDocument40 pagesToyota Motor Manufacturing IncBrian SembiringNo ratings yet
- OmniBAS IDU Installation Ed4.0 enDocument120 pagesOmniBAS IDU Installation Ed4.0 enandy_krsk100% (1)
- J420V06 enDocument4 pagesJ420V06 enMarianoNo ratings yet
- Eight Steps or Principles For SMEDDocument3 pagesEight Steps or Principles For SMEDAlex SalazNo ratings yet
- (Riccardo Viale, Fondazione Rosselli) The Capitali (B-Ok - CC) PDFDocument364 pages(Riccardo Viale, Fondazione Rosselli) The Capitali (B-Ok - CC) PDFmarceloamaralNo ratings yet
- Motor Identification Simovert Masterdrives VCDocument4 pagesMotor Identification Simovert Masterdrives VCFelipe Polix BarbosaNo ratings yet
- BerniniDocument13 pagesBerniniPanagiotis KarafillisNo ratings yet
- Generator circuit breaker control configurationDocument9 pagesGenerator circuit breaker control configurationyousufNo ratings yet
- PDF Emr2 Flyer en DLDocument6 pagesPDF Emr2 Flyer en DLAmr Samir100% (1)
- General Information - System Operation: Pantalla AnteriorDocument4 pagesGeneral Information - System Operation: Pantalla AnteriorGustavo PereiraNo ratings yet
- Ec5111 6-09 PDFDocument5 pagesEc5111 6-09 PDFAnonymous M0OEZEKoGiNo ratings yet
- P0100 Mass Air Flow CircuitDocument7 pagesP0100 Mass Air Flow CircuitDaniel rodriguez alayoNo ratings yet
- Bernini OverviewDocument7 pagesBernini Overviewaberardo1No ratings yet
- Description: PrintDocument8 pagesDescription: PrintAUTOSCOPE DIAGNOSIS PERUNo ratings yet
- 19369681714Document2 pages19369681714sagarprajapati6998No ratings yet
- VLT AutomationDrive FC360 ProgrammingGuide MG06C102 PDFDocument110 pagesVLT AutomationDrive FC360 ProgrammingGuide MG06C102 PDFMinh Nguyễn100% (1)
- LG Inverter iC5 Series CompactDocument20 pagesLG Inverter iC5 Series CompactlamonahNo ratings yet
- EC5000 Speed ControllerDocument2 pagesEC5000 Speed ControllerBruno MarianoNo ratings yet
- DKG-109J Automatic Mains Failure Unit: Canbus VersionDocument2 pagesDKG-109J Automatic Mains Failure Unit: Canbus VersionNazmin ZulbadliNo ratings yet
- Genset Control For Auto Start and Transfer Switch Operation (Model "320/350")Document4 pagesGenset Control For Auto Start and Transfer Switch Operation (Model "320/350")mohammad javad golNo ratings yet
- 2AR-FE - ENGINE Control SystemDocument10 pages2AR-FE - ENGINE Control Systemtrung nguyen toanNo ratings yet
- 3500 Engine Monitoring SystemDocument15 pages3500 Engine Monitoring SystemMohamed BakheetNo ratings yet
- System OverviewDocument5 pagesSystem OverviewYousuf AliNo ratings yet
- Electronic Control System Components C27Document6 pagesElectronic Control System Components C27insano008No ratings yet
- Power System - Fast Training ProgramDocument26 pagesPower System - Fast Training ProgramMohammed ElbadriNo ratings yet
- GP10 Start-Up GuideDocument11 pagesGP10 Start-Up GuideJuan I. Meza LozanoNo ratings yet
- A TNN DCS25 149a 1 2006 04 031 PDFDocument31 pagesA TNN DCS25 149a 1 2006 04 031 PDFGoran RistićNo ratings yet
- TecoDocument94 pagesTecoNgọc ÁnhNo ratings yet
- DSKS enDocument2 pagesDSKS enhlphuocsonNo ratings yet
- RM 61Document653 pagesRM 61joxeno907No ratings yet
- 120H Motor Grader documentation on electrical componentsDocument6 pages120H Motor Grader documentation on electrical componentsMiguel Angel Garrido CardenasNo ratings yet
- EML System On BMW 12cyl Engines - Theory of OpsDocument6 pagesEML System On BMW 12cyl Engines - Theory of OpsDOMINO66No ratings yet
- MCS350-1 (NTA855-G2A) Generating Set Technical Data Sheet: Millennium Power Manufacturing CorpDocument5 pagesMCS350-1 (NTA855-G2A) Generating Set Technical Data Sheet: Millennium Power Manufacturing CorpRianNo ratings yet
- LS Inverter iC5 SeriesDocument20 pagesLS Inverter iC5 SeriesKỹ Sư TđhNo ratings yet
- Digital DC Drives & Systems Upto 5000 KWDocument12 pagesDigital DC Drives & Systems Upto 5000 KWGemco ControlsNo ratings yet
- DC Em3000Document2 pagesDC Em3000muhammad arif50% (4)
- GSC300 User Manual Rev2.5Document21 pagesGSC300 User Manual Rev2.5Sonnie LedbetterNo ratings yet
- Komatsu EgseDocument6 pagesKomatsu EgseAllan Rey FernandezNo ratings yet
- Base Drive Operation: Stan Ar Ontrol Mo EsDocument52 pagesBase Drive Operation: Stan Ar Ontrol Mo EsDuvel AragoNo ratings yet
- DG Application AMF / Synchroniser: Conzerv Systems PVT LTDDocument4 pagesDG Application AMF / Synchroniser: Conzerv Systems PVT LTDjaikolangaraparambilNo ratings yet
- Programming Guide AQUADocument230 pagesProgramming Guide AQUADejan MihailovicNo ratings yet
- Digital Speed Control MethodsDocument23 pagesDigital Speed Control MethodsSam eagle goodNo ratings yet
- Registration Form: Bangladesh Gas & Diesel Engine Power Plant Group (Job & Service)Document1 pageRegistration Form: Bangladesh Gas & Diesel Engine Power Plant Group (Job & Service)Sreepriodas RoyNo ratings yet
- Engine Main Data-5141600585881452Document1 pageEngine Main Data-5141600585881452yousufNo ratings yet
- Optimize CAN Network StructureDocument14 pagesOptimize CAN Network StructureyousufNo ratings yet
- Panelware P120 Compact Mmi: Model No.: MAP120-0EDocument58 pagesPanelware P120 Compact Mmi: Model No.: MAP120-0ESreepriodas RoyNo ratings yet
- Registration Form: Bangladesh Gas & Diesel Engine Power Plant Group (Job & Service)Document1 pageRegistration Form: Bangladesh Gas & Diesel Engine Power Plant Group (Job & Service)Sreepriodas RoyNo ratings yet
- 4Kjd BJNFJD, Fno J@B TLBDocument2 pages4Kjd BJNFJD, Fno J@B TLBSreepriodas RoyNo ratings yet
- Energy Forms Worksheet: - 1 Contact For Answer SheetDocument2 pagesEnergy Forms Worksheet: - 1 Contact For Answer SheetSreepriodas RoyNo ratings yet
- MFR11 ManualDocument59 pagesMFR11 ManualsupermannonNo ratings yet
- Gas Turbine - PDFDocument214 pagesGas Turbine - PDFSreepriodas RoyNo ratings yet
- Kilowatt Relay Programming - EMCP 4.2 Only: Systems OperationDocument9 pagesKilowatt Relay Programming - EMCP 4.2 Only: Systems OperationSreepriodas RoyNo ratings yet
- Importance of Grounding Standby Generator Systems: Your Reliable Guide For Power SolutionsDocument2 pagesImportance of Grounding Standby Generator Systems: Your Reliable Guide For Power SolutionsAnonymous tXzjQAJttHNo ratings yet
- stc12017q0002 - Post Provided Generator Checklist PDFDocument13 pagesstc12017q0002 - Post Provided Generator Checklist PDFAnand KrishnanNo ratings yet
- Registration Form: Bangladesh Gas & Diesel Engine Power Plant Group (Job & Service)Document1 pageRegistration Form: Bangladesh Gas & Diesel Engine Power Plant Group (Job & Service)Sreepriodas RoyNo ratings yet
- Registration Form: Bangladesh Gas & Diesel Engine Power Plant Group (Job & Service)Document1 pageRegistration Form: Bangladesh Gas & Diesel Engine Power Plant Group (Job & Service)Sreepriodas RoyNo ratings yet
- MFR11 ManualDocument59 pagesMFR11 ManualsupermannonNo ratings yet
- Registration Form: Bangladesh Gas & Diesel Engine Power Plant Group (Job & Service)Document1 pageRegistration Form: Bangladesh Gas & Diesel Engine Power Plant Group (Job & Service)Sreepriodas RoyNo ratings yet
- Registration Form: Bangladesh Gas & Diesel Engine Power Plant Group (Job & Service)Document1 pageRegistration Form: Bangladesh Gas & Diesel Engine Power Plant Group (Job & Service)Sreepriodas RoyNo ratings yet
- Generator Daily Inpection: Generator ID No: Period: MON TUE WED THU FRI SAT SUNDocument2 pagesGenerator Daily Inpection: Generator ID No: Period: MON TUE WED THU FRI SAT SUNSreepriodas RoyNo ratings yet
- Registration Form: Bangladesh Gas & Diesel Engine Power Plant Group (Job & Service)Document1 pageRegistration Form: Bangladesh Gas & Diesel Engine Power Plant Group (Job & Service)Sreepriodas RoyNo ratings yet
- Registration Form: Bangladesh Gas & Diesel Engine Power Plant Group (Job & Service)Document1 pageRegistration Form: Bangladesh Gas & Diesel Engine Power Plant Group (Job & Service)Sreepriodas RoyNo ratings yet
- Vmax/A: Medium Voltage Vacuum Circuit Breaker Ansi: 4.76kV-15 KV 1200-2000 A 31.5 KaDocument35 pagesVmax/A: Medium Voltage Vacuum Circuit Breaker Ansi: 4.76kV-15 KV 1200-2000 A 31.5 KaSreepriodas RoyNo ratings yet
- Registration Form: Bangladesh Gas & Diesel Engine Power Plant Group (Job & Service)Document1 pageRegistration Form: Bangladesh Gas & Diesel Engine Power Plant Group (Job & Service)Sreepriodas RoyNo ratings yet
- Registration Form: Bangladesh Gas & Diesel Engine Power Plant Group (Job & Service)Document1 pageRegistration Form: Bangladesh Gas & Diesel Engine Power Plant Group (Job & Service)Sreepriodas RoyNo ratings yet
- Registration Form: Bangladesh Gas & Diesel Engine Power Plant Group (Job & Service)Document1 pageRegistration Form: Bangladesh Gas & Diesel Engine Power Plant Group (Job & Service)Sreepriodas RoyNo ratings yet
- Registration Form: Bangladesh Gas & Diesel Engine Power Plant Group (Job & Service)Document1 pageRegistration Form: Bangladesh Gas & Diesel Engine Power Plant Group (Job & Service)Sreepriodas RoyNo ratings yet
- Registration Form: Bangladesh Gas & Diesel Engine Power Plant Group (Job & Service)Document1 pageRegistration Form: Bangladesh Gas & Diesel Engine Power Plant Group (Job & Service)Sreepriodas RoyNo ratings yet
- Registration Form: Bangladesh Gas & Diesel Engine Power Plant Group (Job & Service)Document1 pageRegistration Form: Bangladesh Gas & Diesel Engine Power Plant Group (Job & Service)Sreepriodas RoyNo ratings yet
- Protege Transmission RebuildDocument29 pagesProtege Transmission RebuildBrody RivestNo ratings yet
- 4601543493197ICC-ACOTEC Leaflet Edit FileDocument2 pages4601543493197ICC-ACOTEC Leaflet Edit FilesahanNo ratings yet
- AIA'sDocument3 pagesAIA'sVictorNo ratings yet
- Stevenson12e ch8S PDFDocument25 pagesStevenson12e ch8S PDFparavpNo ratings yet
- Lesson 10 Data and Hardware Protection: Computer Literacy Basics: A Comprehensive Guide To IC, 5 EditionDocument39 pagesLesson 10 Data and Hardware Protection: Computer Literacy Basics: A Comprehensive Guide To IC, 5 EditionJeriz Marie GamboaNo ratings yet
- AU301 Auto TransmissionDocument2 pagesAU301 Auto TransmissionvaisakmctNo ratings yet
- Omar Elwan 900-07-3202 POLS 415: " Is There A Difference Between The US Position and The Israeli Position On Iran"Document10 pagesOmar Elwan 900-07-3202 POLS 415: " Is There A Difference Between The US Position and The Israeli Position On Iran"Omar ElwanNo ratings yet
- Cisco ASR 5000 System Administration GuideDocument380 pagesCisco ASR 5000 System Administration Guiderohitkamahi100% (1)
- Geiger Counter TutotialDocument3 pagesGeiger Counter Tutotialapi-248437787No ratings yet
- Heico LockDocument7 pagesHeico LockDoğan ArslanNo ratings yet
- Supp CDocument65 pagesSupp CHoNestLiArNo ratings yet
- Death of Crypto King Nikolai Mushegian Fuels Conspiracy TheoriesDocument15 pagesDeath of Crypto King Nikolai Mushegian Fuels Conspiracy Theorieshans hansenNo ratings yet
- RibbonDocument33 pagesRibbonjavluqNo ratings yet
- Low Power Approximate Unsigned Multipliers With Configurable Error RecoveryDocument8 pagesLow Power Approximate Unsigned Multipliers With Configurable Error RecoveryKesav MuthukumarNo ratings yet
- PDFDocument1 pagePDFsilpaNo ratings yet
- GTM Unix Prog Manual 4.4Document605 pagesGTM Unix Prog Manual 4.4maxedroomNo ratings yet
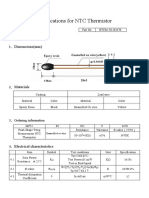
- Specifications For NTC Thermistor: Dimensions (MM)Document9 pagesSpecifications For NTC Thermistor: Dimensions (MM)aliNo ratings yet