You might also like
- Easy-to-Teach and Easy-to-Operate Arc Welding Robot-Satisfies User's Needs For Saving Space and High ProductivityDocument2 pagesEasy-to-Teach and Easy-to-Operate Arc Welding Robot-Satisfies User's Needs For Saving Space and High Productivityanh thoNo ratings yet
- Arc Welding Solution: With Yaskawa MotomanDocument26 pagesArc Welding Solution: With Yaskawa MotomanMayank Jain0% (1)
- Train LapbookDocument34 pagesTrain LapbookSebõk KatalinNo ratings yet
- Grade 12 marketing principles course outlineDocument4 pagesGrade 12 marketing principles course outlineE-dlord M-alabanan100% (3)
- THL1200 enDocument2 pagesTHL1200 enjet.heNo ratings yet
- SCARA Robot THL SeriesDocument2 pagesSCARA Robot THL Series123qweNo ratings yet
- Shibaura (New) Scara The 600Document4 pagesShibaura (New) Scara The 600Pame MelussiNo ratings yet
- SC700 Standard SpecificationsDocument15 pagesSC700 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- Smzen 114 003 - MZ01 01 CFDDocument20 pagesSmzen 114 003 - MZ01 01 CFDmfsNo ratings yet
- Scara DatasheetDocument25 pagesScara Datasheetminegames1983No ratings yet
- MELFA RH-3CH SCARA Robot Brochure PDFDocument2 pagesMELFA RH-3CH SCARA Robot Brochure PDFVirendra ZopeNo ratings yet
- FS03NDocument1 pageFS03NSylwia KryszczyszynNo ratings yet
- VM 6083 - 60B1 Data SheetDocument3 pagesVM 6083 - 60B1 Data SheetMinh HoàngNo ratings yet
- VS-6556 and VS 6577 Technical Data SheetDocument3 pagesVS-6556 and VS 6577 Technical Data SheetKien Nguyen TrungNo ratings yet
- MZ07-02 Standard SpecificationsDocument18 pagesMZ07-02 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- ES12 BrochureDocument2 pagesES12 BrochureXanti Zabala Da RosaNo ratings yet
- ls6-b_scara_robot_product_specifications_cpd-57403Document2 pagesls6-b_scara_robot_product_specifications_cpd-57403lam minhNo ratings yet
- EZ03-02 Standard SpecificationsDocument28 pagesEZ03-02 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- Robot SCARA Cobra I600Document2 pagesRobot SCARA Cobra I600OM2019No ratings yet
- MZ04 Standard SpecificationsDocument29 pagesMZ04 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- Heavy duty handling robot lifts 350kg loadsDocument2 pagesHeavy duty handling robot lifts 350kg loadsXanti Zabala Da RosaNo ratings yet
- Flyer Scara Robot 3ia enDocument2 pagesFlyer Scara Robot 3ia enJafet ANo ratings yet
- Delta-Robots Datasheet en 201509 I44I-E-02 tcm849-110911 PDFDocument21 pagesDelta-Robots Datasheet en 201509 I44I-E-02 tcm849-110911 PDFMohammed Al HosiniNo ratings yet
- Proven Reliability and Performance, Plus Greater Versatility and Operating EaseDocument2 pagesProven Reliability and Performance, Plus Greater Versatility and Operating EaseKhoi NguyenNo ratings yet
- Comau Compact Catalogue RoboticsDocument8 pagesComau Compact Catalogue RoboticsDiHuBar InnovationsNo ratings yet
- DELTA IA-Robot SCARA C EN 20190516 WebDocument24 pagesDELTA IA-Robot SCARA C EN 20190516 WebKishan TalawattaNo ratings yet
- NRS EZ0302 StandardSpecificationDocument40 pagesNRS EZ0302 StandardSpecificationArifNo ratings yet
- MC400L BrochureDocument2 pagesMC400L BrochureXanti Zabala Da RosaNo ratings yet
- TS2 40 4 Axis Product Data Sheet ENDocument3 pagesTS2 40 4 Axis Product Data Sheet ENCHAMOUXNo ratings yet
- Scara SR 12ia Flyer enDocument2 pagesScara SR 12ia Flyer enJorge Israel Suárez AguilarNo ratings yet
- Ssraen 071 006 - Sra H 01 FD11Document30 pagesSsraen 071 006 - Sra H 01 FD11Eddy AlmeidaNo ratings yet
- DENSO Robotics Datasheet HM-G SeriesDocument2 pagesDENSO Robotics Datasheet HM-G SeriesMarius Constantin100% (1)
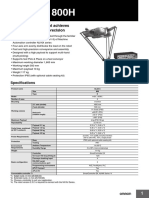
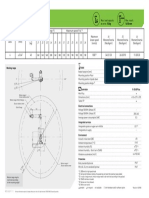
- Parallel Robot Quattro 800H Achieves High Speed PrecisionDocument2 pagesParallel Robot Quattro 800H Achieves High Speed PrecisionjorgemantillaNo ratings yet
- DENSO Robotics Datasheet Vs 068-087 SeriesDocument2 pagesDENSO Robotics Datasheet Vs 068-087 SeriesAdamNo ratings yet
- DELTA IA-Robot SCARA C EN 20170327Document24 pagesDELTA IA-Robot SCARA C EN 20170327chichialinNo ratings yet
- Nachi mz07 SpecificationDocument26 pagesNachi mz07 Specificationkhophimhd100% (1)
- Datasheet M 2ia 3SLDocument1 pageDatasheet M 2ia 3SLGabriel de OliveiraNo ratings yet
- HM-G Series Horizontal Articulated RobotDocument8 pagesHM-G Series Horizontal Articulated RobotAchinNo ratings yet
- Item # PK264M-03B, Stepper MotorDocument3 pagesItem # PK264M-03B, Stepper MotorVigneswaran KNo ratings yet
- CPP 45 BDocument2 pagesCPP 45 BWahyudi andhika comNo ratings yet
- Mesin Robot GreasingDocument2 pagesMesin Robot Greasingadventius S.SNo ratings yet
- Dr3ib 8l Flyer enDocument2 pagesDr3ib 8l Flyer enEdwin ReinosoNo ratings yet
- R7701e 3Document2 pagesR7701e 3Đinh LinhNo ratings yet
- Seatex MRU H PDFDocument2 pagesSeatex MRU H PDFCindy0% (1)
- SC400L-SC500 Standard SpecificationsDocument26 pagesSC400L-SC500 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- TS2 80 4 Axis Product Data Sheet EN 59276 PDF WebDocument3 pagesTS2 80 4 Axis Product Data Sheet EN 59276 PDF WebHoratiu HarNo ratings yet
- TS2 60 4 Axis Product Data Sheet enDocument3 pagesTS2 60 4 Axis Product Data Sheet enCHAMOUXNo ratings yet
- Outstanding Path Accuracy: Maximum Precision andDocument2 pagesOutstanding Path Accuracy: Maximum Precision andJorge GodielNo ratings yet
- A04b 0104 b181 Fanuc Axis Rotary TableDocument2 pagesA04b 0104 b181 Fanuc Axis Rotary Tableclogic26No ratings yet
- TX200 6 Axis Product Data Sheet ENDocument3 pagesTX200 6 Axis Product Data Sheet ENVăn Hiếu NguyễnNo ratings yet
- TS2 80 4 Axis Product Data Sheet ENDocument3 pagesTS2 80 4 Axis Product Data Sheet ENCHAMOUXNo ratings yet
- Lr10ia10 Flyer enDocument2 pagesLr10ia10 Flyer enmichelNo ratings yet
- CP-2HK Series: Dimension (MM)Document2 pagesCP-2HK Series: Dimension (MM)Gustavo YbañezNo ratings yet
- Item # PK266M-03B, Stepper Motor: SpecificationsDocument3 pagesItem # PK266M-03B, Stepper Motor: SpecificationsMyo Zin AungNo ratings yet
- rg6 Gripper Datasheet PDFDocument6 pagesrg6 Gripper Datasheet PDFRaj RajNo ratings yet
- R 2000ic 100P Flyer ENDocument2 pagesR 2000ic 100P Flyer ENperop123No ratings yet
- 1-Axis Servo Possition Maintenance ManualDocument126 pages1-Axis Servo Possition Maintenance Manualto0984903132No ratings yet
- CRX-10 Robot Working Range: 10 KG 1418 MMDocument1 pageCRX-10 Robot Working Range: 10 KG 1418 MMMelike KısmetNo ratings yet
- 4sdk4.7960Document2 pages4sdk4.7960Dominik PIWOWARCZYKNo ratings yet
- Datasheet 5 Axis Flight Motion Simulator AC55H S20 40 Hi DyDocument2 pagesDatasheet 5 Axis Flight Motion Simulator AC55H S20 40 Hi DyHung Nguyen NgocNo ratings yet
- 2 PDFDocument103 pages2 PDF123qweNo ratings yet
- 1 PDFDocument103 pages1 PDF123qweNo ratings yet
- Niryo One - User Manual (03-09-2019)Document54 pagesNiryo One - User Manual (03-09-2019)123qweNo ratings yet
- Libretto Istr. CEC71-CCT61-CCT71-CCT91Document16 pagesLibretto Istr. CEC71-CCT61-CCT71-CCT91123qweNo ratings yet
- 01 Hans Robot Elfin Maunal Hardware Installation EN PDFDocument36 pages01 Hans Robot Elfin Maunal Hardware Installation EN PDF123qweNo ratings yet
- 03 Hans Robot Elfin Maunal Software Installation EN PDFDocument183 pages03 Hans Robot Elfin Maunal Software Installation EN PDF123qweNo ratings yet
- Elfin-General Digital IO Controller PDFDocument4 pagesElfin-General Digital IO Controller PDF123qweNo ratings yet
- THE600 External View : Shibaura Machine's NEW Model SCARA Robot THE600Document2 pagesTHE600 External View : Shibaura Machine's NEW Model SCARA Robot THE600123qweNo ratings yet
- RC180 Safety ND A Installation: Read This Manual First Rev.17 EM121B2279FDocument116 pagesRC180 Safety ND A Installation: Read This Manual First Rev.17 EM121B2279F123qweNo ratings yet
- TH Series: Wide Variations, Fast Motion and Heavy DutyDocument14 pagesTH Series: Wide Variations, Fast Motion and Heavy Duty123qweNo ratings yet
- ResearchDocument44 pagesResearchGwend MemoracionNo ratings yet
- Max Brooks - The Zombie Survival Guide (Scanned Book)Document270 pagesMax Brooks - The Zombie Survival Guide (Scanned Book)tusko88% (8)
- Underwater vessels, sensors, weapons and control systemsDocument1 pageUnderwater vessels, sensors, weapons and control systemsNguyễn ThaoNo ratings yet
- Oil Well Drilling Methods: University of Karbala College of Engineering Petroleum Eng. DepDocument8 pagesOil Well Drilling Methods: University of Karbala College of Engineering Petroleum Eng. DepAli MahmoudNo ratings yet
- Me f215 Mel Lab ManualDocument105 pagesMe f215 Mel Lab ManualpankazspamNo ratings yet
- Iag Narrative ReportDocument16 pagesIag Narrative ReportHoely SaintNo ratings yet
- Three Thousand Years of Longing 2022Document93 pagesThree Thousand Years of Longing 2022Ppper pepperNo ratings yet
- 3.19 Passive VoiceDocument10 pages3.19 Passive VoiceRetno RistianiNo ratings yet
- AMS 2750 E Heat Treatment Standards ComplianceDocument3 pagesAMS 2750 E Heat Treatment Standards ComplianceQualidadeTFNo ratings yet
- CCNA Security Instructor Lab Manual v1 - p8Document1 pageCCNA Security Instructor Lab Manual v1 - p8MeMe AmroNo ratings yet
- Slogan Goes Here: Local Store Importing CompanyDocument1 pageSlogan Goes Here: Local Store Importing Company5gt6kdfdqhNo ratings yet
- Akali NihangsDocument19 pagesAkali NihangsAngad YuvrajNo ratings yet
- Nanotechnology in TextilesDocument4 pagesNanotechnology in Textileskevin cagud PhillipNo ratings yet
- NHW Upper Intermediate 4e Wordlist HungarianDocument34 pagesNHW Upper Intermediate 4e Wordlist HungarianpcdmisNo ratings yet
- POMR Satiti Acute CholangitisDocument30 pagesPOMR Satiti Acute CholangitisIka AyuNo ratings yet
- Case StudiesDocument19 pagesCase StudiesSorin MarkovNo ratings yet
- Arizona State University DissertationsDocument5 pagesArizona State University Dissertationshoffklawokor1974100% (1)
- Pharmaco-pornographic Politics and the New Gender EcologyDocument14 pagesPharmaco-pornographic Politics and the New Gender EcologyMgalo MgaloNo ratings yet
- Pe 3 (Module 1) PDFDocument6 pagesPe 3 (Module 1) PDFJoshua Picart100% (1)
- Negros IslandDocument18 pagesNegros IslandGrace AmaganNo ratings yet
- Nescafe Cold CoffeeDocument24 pagesNescafe Cold CoffeeMuhammad Omer SaeedNo ratings yet
- Envi. Data AcquisitionDocument10 pagesEnvi. Data AcquisitionDexter John Gomez JomocNo ratings yet
- Implementing Cisco Application Centric Infrastructure: (Dcaci)Document2 pagesImplementing Cisco Application Centric Infrastructure: (Dcaci)radsssssNo ratings yet
- PhotosynthesisDocument30 pagesPhotosynthesisAngela CanlasNo ratings yet
- Effect of Grain Boundary Thermal Expansion on Silicon Nitride Fracture ToughnessDocument8 pagesEffect of Grain Boundary Thermal Expansion on Silicon Nitride Fracture Toughnessbrijesh kinkhabNo ratings yet
- Section 6 - Diagnostic ProceduresDocument13 pagesSection 6 - Diagnostic Proceduresanon_152488453100% (1)
- Югоизточна Европа под османско владичество 1354-1804Document531 pagesЮгоизточна Европа под османско владичество 1354-1804auroradentataNo ratings yet
- ASTM G 38 - 73 r95Document7 pagesASTM G 38 - 73 r95Samuel EduardoNo ratings yet