You might also like
- SCARA Robot THL SeriesDocument2 pagesSCARA Robot THL Series123qweNo ratings yet
- Shibaura Machine S NEW Model SCARA Robot THE400Document2 pagesShibaura Machine S NEW Model SCARA Robot THE400123qweNo ratings yet
- Shibaura (New) Scara The 600Document4 pagesShibaura (New) Scara The 600Pame MelussiNo ratings yet
- Scara DatasheetDocument25 pagesScara Datasheetminegames1983No ratings yet
- FS03NDocument1 pageFS03NSylwia KryszczyszynNo ratings yet
- TS2 80 4 Axis Product Data Sheet EN 59276 PDF WebDocument3 pagesTS2 80 4 Axis Product Data Sheet EN 59276 PDF WebHoratiu HarNo ratings yet
- Smzen 114 003 - MZ01 01 CFDDocument20 pagesSmzen 114 003 - MZ01 01 CFDmfsNo ratings yet
- VS-6556 and VS 6577 Technical Data SheetDocument3 pagesVS-6556 and VS 6577 Technical Data SheetKien Nguyen TrungNo ratings yet
- TS2 40 4 Axis Product Data Sheet ENDocument3 pagesTS2 40 4 Axis Product Data Sheet ENCHAMOUXNo ratings yet
- Proven Reliability and Performance, Plus Greater Versatility and Operating EaseDocument2 pagesProven Reliability and Performance, Plus Greater Versatility and Operating EaseKhoi NguyenNo ratings yet
- Comau Compact Catalogue RoboticsDocument8 pagesComau Compact Catalogue RoboticsDiHuBar InnovationsNo ratings yet
- CNC19 - EngDocument2 pagesCNC19 - EngEhab Attia SelimNo ratings yet
- SC700 Standard SpecificationsDocument15 pagesSC700 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
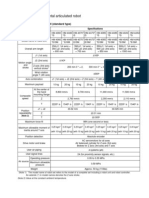
- HM-G Series Horizontal Articulated RobotDocument8 pagesHM-G Series Horizontal Articulated RobotAchinNo ratings yet
- VM 6083 - 60B1 Data SheetDocument3 pagesVM 6083 - 60B1 Data SheetMinh HoàngNo ratings yet
- EZ03-02 Standard SpecificationsDocument28 pagesEZ03-02 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- Ficha Tecnica - Tabla de Carga Sany 100Document2 pagesFicha Tecnica - Tabla de Carga Sany 100anthony_vidalNo ratings yet
- MZ07-02 Standard SpecificationsDocument18 pagesMZ07-02 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- TS2 80 4 Axis Product Data Sheet ENDocument3 pagesTS2 80 4 Axis Product Data Sheet ENCHAMOUXNo ratings yet
- MELFA RH-3CH SCARA Robot Brochure PDFDocument2 pagesMELFA RH-3CH SCARA Robot Brochure PDFVirendra ZopeNo ratings yet
- TS2 60 4 Axis Product Data Sheet enDocument3 pagesTS2 60 4 Axis Product Data Sheet enCHAMOUXNo ratings yet
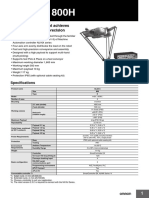
- Parallel Robot Quattro 800H Achieves High Speed PrecisionDocument2 pagesParallel Robot Quattro 800H Achieves High Speed PrecisionjorgemantillaNo ratings yet
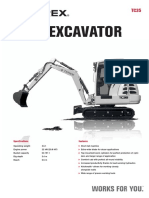
- Terex - tc35Document4 pagesTerex - tc35AnaNo ratings yet
- Data SheetDocument2 pagesData SheetShrinivas Venkataramanujam SriramNo ratings yet
- MZ04 Standard SpecificationsDocument29 pagesMZ04 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- DENSO Robotics Datasheet Vs 068-087 SeriesDocument2 pagesDENSO Robotics Datasheet Vs 068-087 SeriesAdamNo ratings yet
- NRS EZ0302 StandardSpecificationDocument40 pagesNRS EZ0302 StandardSpecificationArifNo ratings yet
- Ariete C2_specificationsDocument1 pageAriete C2_specificationstomas.paccamiciNo ratings yet
- Ssraen 071 006 - Sra H 01 FD11Document30 pagesSsraen 071 006 - Sra H 01 FD11Eddy AlmeidaNo ratings yet
- ls6-b_scara_robot_product_specifications_cpd-57403Document2 pagesls6-b_scara_robot_product_specifications_cpd-57403lam minhNo ratings yet
- Potenciometro de Joystick 80HXDocument3 pagesPotenciometro de Joystick 80HXjlmacxNo ratings yet
- Jis G-3444Document10 pagesJis G-3444Maulana YusufNo ratings yet
- TX200 6 Axis Product Data Sheet ENDocument3 pagesTX200 6 Axis Product Data Sheet ENVăn Hiếu NguyễnNo ratings yet
- Total Station - Tech Specs - 2'' & 3''Document1 pageTotal Station - Tech Specs - 2'' & 3''vsimeunovic1No ratings yet
- DENSO Robotics Datasheet HM-G SeriesDocument2 pagesDENSO Robotics Datasheet HM-G SeriesMarius Constantin100% (1)
- Kubota Mini Excavator: SpecificationsDocument4 pagesKubota Mini Excavator: SpecificationsMito ManNo ratings yet
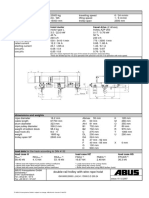
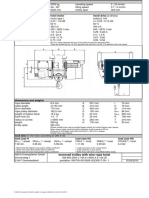
- SC10876B - Hoist DrawingDocument1 pageSC10876B - Hoist DrawingMotlatjo RakgothoNo ratings yet
- SC400L-SC500 Standard SpecificationsDocument26 pagesSC400L-SC500 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- 6672_WBT_RH_BlackBox_HF-Spec_sheet_ENG_v01_WEB (003)Document1 page6672_WBT_RH_BlackBox_HF-Spec_sheet_ENG_v01_WEB (003)Peter KabwenaNo ratings yet
- TC_16_en(32a)Document4 pagesTC_16_en(32a)monsieur.anthonydecharnia37No ratings yet
- FDR Visionary SuiteDocument5 pagesFDR Visionary Suitesandy zhengNo ratings yet
- Seatex MRU H PDFDocument2 pagesSeatex MRU H PDFCindy0% (1)
- 2007 HIE 2P AX10u 7 No4-English-With-Correct-Rollbar-1Document2 pages2007 HIE 2P AX10u 7 No4-English-With-Correct-Rollbar-1nqqcm6fw5nNo ratings yet
- 301.4C Aehq6334-04Document4 pages301.4C Aehq6334-04augustoNo ratings yet
- Mesin Robot GreasingDocument2 pagesMesin Robot Greasingadventius S.SNo ratings yet
- KR 6 R500 Z200: Workspace GraphicDocument1 pageKR 6 R500 Z200: Workspace GraphicAkechai OunsiriNo ratings yet
- Data Sheet For Precision Potentiometer: Singleturn Wirewound Potentiometer Series RPS50Document5 pagesData Sheet For Precision Potentiometer: Singleturn Wirewound Potentiometer Series RPS50Vasile DumitruNo ratings yet
- GM - 6000 20000 - L-242 41 15000 3 D - 200 24 2500 GBDocument1 pageGM - 6000 20000 - L-242 41 15000 3 D - 200 24 2500 GBEduardo Garcia SaraviaNo ratings yet
- Compact mini crane offers nearly 3 tonnes of lifting power through standard doorwaysDocument2 pagesCompact mini crane offers nearly 3 tonnes of lifting power through standard doorwaysalbcatalNo ratings yet
- 2T X 18.1 Span ELK Hoist Data SheetDocument1 page2T X 18.1 Span ELK Hoist Data SheetNael SwedanNo ratings yet
- THP06-142S 0.6m Single Polarization Parabolic AntennaDocument4 pagesTHP06-142S 0.6m Single Polarization Parabolic AntennaturkoooNo ratings yet
- Mini Excavator: Features Technical DataDocument4 pagesMini Excavator: Features Technical DataluismdmjNo ratings yet
- HazardDocument44 pagesHazardsoayNo ratings yet
- Delta-Robots Datasheet en 201509 I44I-E-02 tcm849-110911 PDFDocument21 pagesDelta-Robots Datasheet en 201509 I44I-E-02 tcm849-110911 PDFMohammed Al HosiniNo ratings yet
- Eco 095 Technical SpecificationDocument3 pagesEco 095 Technical Specificationfabiangrandon2314No ratings yet
- Jumbo de Explotación PDFDocument4 pagesJumbo de Explotación PDFMarioNo ratings yet
- Understanding and Servicing Alarm SystemsFrom EverandUnderstanding and Servicing Alarm SystemsRating: 1 out of 5 stars1/5 (1)
- Millimetre Wave Antennas for Gigabit Wireless Communications: A Practical Guide to Design and Analysis in a System ContextFrom EverandMillimetre Wave Antennas for Gigabit Wireless Communications: A Practical Guide to Design and Analysis in a System ContextNo ratings yet
- CSE459 CSharp 02 LanguageOverviewDocument26 pagesCSE459 CSharp 02 LanguageOverviewJulie RobertsNo ratings yet
- CHP151 - REG216-316 For Generator Protection Solutions - Operation & ConfigurationDocument2 pagesCHP151 - REG216-316 For Generator Protection Solutions - Operation & ConfigurationMichael Parohinog GregasNo ratings yet
- RFM-01 RX ProgrammingDocument14 pagesRFM-01 RX Programmingpierregdlj9308No ratings yet
- ErrorDocument1 pageErrorNalin SwaroopNo ratings yet
- History of Computers in RomaniaDocument3 pagesHistory of Computers in RomaniaAdrian AdascaliteiNo ratings yet
- Ferroxcube Ferrite Material Status Sheet 2003Document2 pagesFerroxcube Ferrite Material Status Sheet 2003AMNo ratings yet
- SEminar Report On Cloud Computing PDFDocument25 pagesSEminar Report On Cloud Computing PDFMridul Sachan50% (2)
- Message Passing Chapter 3Document39 pagesMessage Passing Chapter 3Ashok KumarNo ratings yet
- CS497 Presentation MillerDocument30 pagesCS497 Presentation MillerAzizi AbdullahNo ratings yet
- Multiple Choice Questions for Lecture 1 on Network SystemsDocument4 pagesMultiple Choice Questions for Lecture 1 on Network SystemsWadood QureshiNo ratings yet
- 2016-11-07 MEI Product Catalog JX HighResDocument122 pages2016-11-07 MEI Product Catalog JX HighResAlex CarmonaNo ratings yet
- UntitledDocument4 pagesUntitledndooraeNo ratings yet
- VATECH Co., Ltd. announces application of Anypano-X and AnyCeph-X sensors in i-series productsDocument2 pagesVATECH Co., Ltd. announces application of Anypano-X and AnyCeph-X sensors in i-series productsdekson alvesNo ratings yet
- BL Thereja QA FULLDocument15 pagesBL Thereja QA FULLAishaNo ratings yet
- DS-KH6210-L Video Intercom Indoor Station With 7-Inch ScreenDocument3 pagesDS-KH6210-L Video Intercom Indoor Station With 7-Inch ScreenGrosu HoriaNo ratings yet
- Circular Queue AssignmentDocument6 pagesCircular Queue AssignmentHanan MoizNo ratings yet
- Overview of Software Engineering and The Software Development Process UpdatedDocument23 pagesOverview of Software Engineering and The Software Development Process UpdatedYash GavateNo ratings yet
- Client InformationDocument24 pagesClient InformationBav JhiteNo ratings yet
- Ibm Bto SNV1 Student Guide Book 1 450 525 PDFDocument76 pagesIbm Bto SNV1 Student Guide Book 1 450 525 PDFSreenath GootyNo ratings yet
- A 3.7-MW 12.5-MHz 81-DB SNDR 4th-Order Continuous-Time DSM With Single-OTA and 2nd-Order Noise-Shaping SARDocument13 pagesA 3.7-MW 12.5-MHz 81-DB SNDR 4th-Order Continuous-Time DSM With Single-OTA and 2nd-Order Noise-Shaping SARJatinKumarNo ratings yet
- Mobile Robot For Hot Spot Monitoring in Electric Power SubstationDocument5 pagesMobile Robot For Hot Spot Monitoring in Electric Power SubstationAsiah 'AdilahNo ratings yet
- ch340g Datasheet PDFDocument6 pagesch340g Datasheet PDFPrasetyoNo ratings yet
- MD2 Turbine and Generator Excitation System TrainingDocument42 pagesMD2 Turbine and Generator Excitation System TrainingTung Nguyen100% (1)
- Cutler Hammer Power Command 2Document32 pagesCutler Hammer Power Command 2Nestor San AgustinNo ratings yet
- Raspberry Pi Introduction - Learn About the History and ModelsDocument10 pagesRaspberry Pi Introduction - Learn About the History and ModelsNikiNo ratings yet
- SLC 500Document116 pagesSLC 500denarira1404No ratings yet
- How To Disable (Or Enable) SpotlightDocument12 pagesHow To Disable (Or Enable) SpotlightprwillisNo ratings yet
- Synopsis MatrimonyDocument48 pagesSynopsis Matrimonylekshmi12345678964% (14)
- SMPS CKTDocument5 pagesSMPS CKTdkjena1No ratings yet
- Arduino Mega 2560 r3 Starter Kit Q001151124Document157 pagesArduino Mega 2560 r3 Starter Kit Q001151124abel_524572144100% (2)