You might also like
- Understanding and Servicing Alarm SystemsFrom EverandUnderstanding and Servicing Alarm SystemsRating: 1 out of 5 stars1/5 (1)
- VM 6083 - 60B1 Data SheetDocument3 pagesVM 6083 - 60B1 Data SheetMinh HoàngNo ratings yet
- DENSO Robotics Datasheet Vs 068-087 SeriesDocument2 pagesDENSO Robotics Datasheet Vs 068-087 SeriesAdamNo ratings yet
- MELFA RH-3CH SCARA Robot Brochure PDFDocument2 pagesMELFA RH-3CH SCARA Robot Brochure PDFVirendra ZopeNo ratings yet
- FS03NDocument1 pageFS03NSylwia KryszczyszynNo ratings yet
- Standard specifications for RS080N-B industrial robot arm and E02 controllerDocument5 pagesStandard specifications for RS080N-B industrial robot arm and E02 controllerAdrielSilvaNo ratings yet
- Smzen 114 003 - MZ01 01 CFDDocument20 pagesSmzen 114 003 - MZ01 01 CFDmfsNo ratings yet
- DELTA IA-Robot SCARA C EN 20190516 WebDocument24 pagesDELTA IA-Robot SCARA C EN 20190516 WebKishan TalawattaNo ratings yet
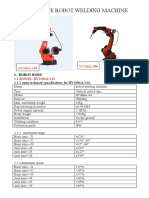
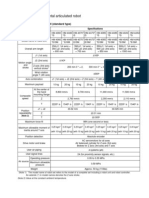
- 6-Axis Type Robot Welding MachineDocument5 pages6-Axis Type Robot Welding MachineVictor PATIÑONo ratings yet
- CPP 45 BDocument2 pagesCPP 45 BWahyudi andhika comNo ratings yet
- 90101-2358dea Zx165ufe02001Document5 pages90101-2358dea Zx165ufe02001László NémethNo ratings yet
- SCARA Robot THL SeriesDocument2 pagesSCARA Robot THL Series123qweNo ratings yet
- THL1200 enDocument2 pagesTHL1200 enjet.heNo ratings yet
- Precision Potentiometer Data SheetDocument5 pagesPrecision Potentiometer Data SheetAdriano VolanteNo ratings yet
- Nivel Sanding SL32Document2 pagesNivel Sanding SL32juan machNo ratings yet
- Shibaura Machine S NEW Model SCARA Robot THE400Document2 pagesShibaura Machine S NEW Model SCARA Robot THE400123qweNo ratings yet
- HM-G Series Horizontal Articulated RobotDocument8 pagesHM-G Series Horizontal Articulated RobotAchinNo ratings yet
- Huawei AQU4518R21V06Document2 pagesHuawei AQU4518R21V06NOKIAXL CJNo ratings yet
- MTS 60 AQU4518R21v06 (4x 1710-2690, 1,5m)Document2 pagesMTS 60 AQU4518R21v06 (4x 1710-2690, 1,5m)МиланNo ratings yet
- Portable Manual Pulse Generator Specifications: Installation Condition For Ul RecognitionDocument18 pagesPortable Manual Pulse Generator Specifications: Installation Condition For Ul RecognitionSiva KumarNo ratings yet
- CP-2HK Series: Dimension (MM)Document2 pagesCP-2HK Series: Dimension (MM)Gustavo YbañezNo ratings yet
- ANT ADU4517R2 1607 DatasheetDocument3 pagesANT ADU4517R2 1607 DatasheetKatherine GalarretaNo ratings yet
- 1080P IR Dome Camera with 25m Night VisionDocument1 page1080P IR Dome Camera with 25m Night VisionDharu_pradiasNo ratings yet
- Scara DatasheetDocument25 pagesScara Datasheetminegames1983No ratings yet
- ES12 BrochureDocument2 pagesES12 BrochureXanti Zabala Da RosaNo ratings yet
- Easy-to-Teach and Easy-to-Operate Arc Welding Robot-Satisfies User's Needs For Saving Space and High ProductivityDocument2 pagesEasy-to-Teach and Easy-to-Operate Arc Welding Robot-Satisfies User's Needs For Saving Space and High Productivityanh thoNo ratings yet
- DELTA IA-Robot SCARA C EN 20170327Document24 pagesDELTA IA-Robot SCARA C EN 20170327chichialinNo ratings yet
- Contactless Hall-IC Angle Sensor Spec SheetDocument2 pagesContactless Hall-IC Angle Sensor Spec Sheetdanila99No ratings yet
- Nachi mz07 SpecificationDocument26 pagesNachi mz07 Specificationkhophimhd100% (1)
- 6672_WBT_RH_BlackBox_HF-Spec_sheet_ENG_v01_WEB (003)Document1 page6672_WBT_RH_BlackBox_HF-Spec_sheet_ENG_v01_WEB (003)Peter KabwenaNo ratings yet
- MZ07-02 Standard SpecificationsDocument18 pagesMZ07-02 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- 01 Manual de Mantenimiento Del RobotDocument10 pages01 Manual de Mantenimiento Del RobotCarlos Eduardo Segura VillarrealNo ratings yet
- DF347D DF457D: GB Si Al BG HR MK Ro RS Rus UaDocument56 pagesDF347D DF457D: GB Si Al BG HR MK Ro RS Rus UaAdi MNo ratings yet
- Multi-voltage Photoelectric Sensor with Timer FunctionDocument11 pagesMulti-voltage Photoelectric Sensor with Timer FunctionkaleehnaNo ratings yet
- DENSO Robotics Datasheet HM-G SeriesDocument2 pagesDENSO Robotics Datasheet HM-G SeriesMarius Constantin100% (1)
- Datasheet SG700 BTDocument2 pagesDatasheet SG700 BTEdwin Noe Ordoñez CespedesNo ratings yet
- V2-50+spec+sheet 28feb+webDocument2 pagesV2-50+spec+sheet 28feb+webAbdul KarimNo ratings yet
- Jaybeam 5920200 LVDocument4 pagesJaybeam 5920200 LVcosconorNo ratings yet
- Cordless Drill ManualDocument56 pagesCordless Drill ManualAdi MNo ratings yet
- Dyadic Systems CatalogDocument14 pagesDyadic Systems CatalogJuan Francisco Sanchez MassadiNo ratings yet
- HD 1080P IR Dome Camera with 20m Night VisionDocument1 pageHD 1080P IR Dome Camera with 20m Night VisionHector GarciaNo ratings yet
- 01 2023 Collective Data Sheet-1Document2 pages01 2023 Collective Data Sheet-1Lasitha RanaweeraNo ratings yet
- DXX-790-960/1710-2180-65/65-17.5i/18.5i-M/M-C: Electrical PropertiesDocument2 pagesDXX-790-960/1710-2180-65/65-17.5i/18.5i-M/M-C: Electrical PropertiesЮлия АбоймоваNo ratings yet
- Antena HuaweiDocument3 pagesAntena HuaweiJuan SilvaNo ratings yet
- Catalogo Estacion Total Foif RTS 100Document2 pagesCatalogo Estacion Total Foif RTS 100JhonatanNo ratings yet
- BRTIRUS0401A Robot Technical RecommendationDocument4 pagesBRTIRUS0401A Robot Technical RecommendationPeterKPNo ratings yet
- 1080P HD CCTV Dome Camera with Vari-focal LensDocument1 page1080P HD CCTV Dome Camera with Vari-focal LensHector GarciaNo ratings yet
- Automatic Pendulum Impact Tester - Class J - Technical Brochure - v. 2022Document7 pagesAutomatic Pendulum Impact Tester - Class J - Technical Brochure - v. 2022RuskyNo ratings yet
- DS AL17 19 enDocument6 pagesDS AL17 19 enJose ReyesNo ratings yet
- ANT-A194518R0v06-1867-001 DatasheetDocument2 pagesANT-A194518R0v06-1867-001 DatasheetAlvaro Avila SanchezNo ratings yet
- AQU4518R21V06Document2 pagesAQU4518R21V06luca_allegrettiNo ratings yet
- HD CCTV 1080P IR Dome Camera: FeaturesDocument1 pageHD CCTV 1080P IR Dome Camera: FeaturesIsatoNo ratings yet
- ANT-ADU4516R2-1702-001 Datasheet - LTE ANCHADocument3 pagesANT-ADU4516R2-1702-001 Datasheet - LTE ANCHAAnny Yohana Reyes SilvaNo ratings yet
- DX-1710-2200-65-18i-M: Electrical PropertiesDocument2 pagesDX-1710-2200-65-18i-M: Electrical PropertiesАлександр100% (1)
- Spinnerflex Topfit Jumper SF 3/8"-50-Pe and SF 3/8"-50-Fr: Data Sheet Type: JDocument6 pagesSpinnerflex Topfit Jumper SF 3/8"-50-Pe and SF 3/8"-50-Fr: Data Sheet Type: Jjhbj kklmNo ratings yet
- EZ03-02 Standard SpecificationsDocument28 pagesEZ03-02 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- Ur 10 Spec Manual RobotDocument1 pageUr 10 Spec Manual RobotAsim PedicNo ratings yet
- Adept_SmartController_CX_DatasheetDocument4 pagesAdept_SmartController_CX_DatasheetKien Nguyen TrungNo ratings yet
- STT Robot Group Controller ListDocument9 pagesSTT Robot Group Controller ListKien Nguyen TrungNo ratings yet
- Socket MessageDocument7 pagesSocket MessageKien Nguyen TrungNo ratings yet
- Adept_sDIO_ManualDocument160 pagesAdept_sDIO_ManualKien Nguyen TrungNo ratings yet
- Hanli Chiller User ManualDocument25 pagesHanli Chiller User ManualKien Nguyen TrungNo ratings yet
- User Manual-BM114S - 6KW Auto-Focusing Laser Cutting Head - V1.0Document30 pagesUser Manual-BM114S - 6KW Auto-Focusing Laser Cutting Head - V1.0Kien Nguyen TrungNo ratings yet
- H1 Detailed Manual V1.2Document74 pagesH1 Detailed Manual V1.2Trí Chốt75% (4)
- De Up130Document1 pageDe Up130Kien Nguyen TrungNo ratings yet
- Toptier Product Guide v2bDocument50 pagesToptier Product Guide v2bred patriotNo ratings yet
- Palletizer PL01 & PL02: 2 Edition Beg. S/N 380,000 (PL01) Beg. S/N 430,900 (PL02)Document51 pagesPalletizer PL01 & PL02: 2 Edition Beg. S/N 380,000 (PL01) Beg. S/N 430,900 (PL02)Kien Nguyen TrungNo ratings yet
- Choice Bagging MANUALDocument104 pagesChoice Bagging MANUALKien Nguyen TrungNo ratings yet
- Conveying & Palletizing: Harmony in MotionDocument32 pagesConveying & Palletizing: Harmony in MotionKien Nguyen TrungNo ratings yet
- Socket MessageDocument7 pagesSocket MessageKien Nguyen TrungNo ratings yet
- mh2 PLDocument1 pagemh2 PLKien Nguyen TrungNo ratings yet
- Automatic Stretch Wrapping Machines Semi-Automatic Stretch Wrapping Machines Palletizing Systems Conveying SystemsDocument24 pagesAutomatic Stretch Wrapping Machines Semi-Automatic Stretch Wrapping Machines Palletizing Systems Conveying SystemsKien Nguyen TrungNo ratings yet
- M3-ÉP Y2 M5-CHỜ Y4 M6-GẮP Y5 Đá Bao Y12 SS7 X24 M4-ÉP Y3 M1A-Dẫn Y13 SS7 X24Document1 pageM3-ÉP Y2 M5-CHỜ Y4 M6-GẮP Y5 Đá Bao Y12 SS7 X24 M4-ÉP Y3 M1A-Dẫn Y13 SS7 X24Kien Nguyen TrungNo ratings yet
- Newte Bag Palletizing 1Document15 pagesNewte Bag Palletizing 1Kien Nguyen TrungNo ratings yet
- Fuji Yusoki Kogyo Co., LTD.: The Worlds Leading Robotic PalletizerDocument12 pagesFuji Yusoki Kogyo Co., LTD.: The Worlds Leading Robotic PalletizerAlejandro BautistaNo ratings yet
- Newte Bag Palletizing 2Document4 pagesNewte Bag Palletizing 2Kien Nguyen TrungNo ratings yet
- Robotiq Palletizing: SolutionDocument97 pagesRobotiq Palletizing: SolutionKien Nguyen TrungNo ratings yet
- BW Intergrated SystemsDocument2 pagesBW Intergrated SystemsKien Nguyen TrungNo ratings yet
- Your Palletizing SolutionDocument8 pagesYour Palletizing SolutionKien Nguyen TrungNo ratings yet
- Newte Bag Palletizing 3Document4 pagesNewte Bag Palletizing 3Kien Nguyen TrungNo ratings yet
- Automatic Bag Palletizers: Robotic Versus Conventional: Chantland MHSDocument5 pagesAutomatic Bag Palletizers: Robotic Versus Conventional: Chantland MHSKien Nguyen TrungNo ratings yet
- Depalletizing Solutions: PalletizingDocument3 pagesDepalletizing Solutions: PalletizingKien Nguyen TrungNo ratings yet
- Columbia Okura 3Document8 pagesColumbia Okura 3Kien Nguyen TrungNo ratings yet
- Columbia Okura 1Document29 pagesColumbia Okura 1Kien Nguyen TrungNo ratings yet
- Palletizing FnctionDocument40 pagesPalletizing FnctionAraamuthan SenathirajahNo ratings yet
- Bag Palletizer: Schneider Offers Bag PalletizersDocument2 pagesBag Palletizer: Schneider Offers Bag PalletizersKien Nguyen TrungNo ratings yet
- Soft or Annealed Copper Wire: Standard Specification ForDocument5 pagesSoft or Annealed Copper Wire: Standard Specification Fororlando acevedoNo ratings yet
- Zonestar GuideDocument59 pagesZonestar GuidepepeNo ratings yet
- Rank and Nullity TheoremDocument6 pagesRank and Nullity TheoremsdfsdfNo ratings yet
- Astm d445Document8 pagesAstm d445Anonymous 6meMTlNo ratings yet
- STA 2023 SyllabusDocument8 pagesSTA 2023 SyllabusEdison FyeNo ratings yet
- Protein Structure TutorialDocument17 pagesProtein Structure TutorialShivaani EswaranNo ratings yet
- Class XII Monthly Test Revision on d-Block ElementsDocument6 pagesClass XII Monthly Test Revision on d-Block ElementsANUBHAV YADAVNo ratings yet
- Short Questions... DbmsDocument10 pagesShort Questions... DbmsMuhammad Jamal ShahNo ratings yet
- How To Turn Off or Disable Hardware Acceleration in Windows 11 - 10Document10 pagesHow To Turn Off or Disable Hardware Acceleration in Windows 11 - 10favio lopezNo ratings yet
- Current Differential Relay ManualDocument4 pagesCurrent Differential Relay Manualppraveenkumar79No ratings yet
- Energy Balance in A Solid Oxide Fuel CellDocument8 pagesEnergy Balance in A Solid Oxide Fuel CellAshik AhmedNo ratings yet
- CB1 - Key Concepts in Biology (Paper 1 and 2)Document2 pagesCB1 - Key Concepts in Biology (Paper 1 and 2)Alhaji SowNo ratings yet
- Multidimensional SchemaDocument4 pagesMultidimensional SchemaJanmejay PantNo ratings yet
- Active Heave Drilling Drawworks Improve Rig EfficiencyDocument5 pagesActive Heave Drilling Drawworks Improve Rig Efficiencygplese0No ratings yet
- IS 2026-2 (2010) - Power Transformers, Part 2 - Temperature-RiseDocument17 pagesIS 2026-2 (2010) - Power Transformers, Part 2 - Temperature-Riserajiv71No ratings yet
- Result: Participant 1 (630N, 164CM) Type of Squat Trial / Force Output (N) Average Force Output (N) 1 2 3 Front BackDocument5 pagesResult: Participant 1 (630N, 164CM) Type of Squat Trial / Force Output (N) Average Force Output (N) 1 2 3 Front BackpatenggNo ratings yet
- EOWR CV-5X Combine 08may2008Document85 pagesEOWR CV-5X Combine 08may2008Them Bui XuanNo ratings yet
- Drawing SheetsDocument11 pagesDrawing SheetsMona DiaaNo ratings yet
- DM200094_Marts 3000_DK400041_ENDocument28 pagesDM200094_Marts 3000_DK400041_ENipasrl.guestNo ratings yet
- Force Gauge Datalogger 100kg ReviewDocument2 pagesForce Gauge Datalogger 100kg ReviewWilly AndretyNo ratings yet
- Subject Content Clarification Guide A LevelDocument24 pagesSubject Content Clarification Guide A LevelKhan SaibNo ratings yet
- HOTS OrganicDocument3 pagesHOTS Organicsohil khattarNo ratings yet
- Msi B75ma-E33 (MS-7808 1.0)Document203 pagesMsi B75ma-E33 (MS-7808 1.0)majkool100% (1)
- Excel Su DokuDocument18 pagesExcel Su DokuHimanshu SharmaNo ratings yet
- Grammar Skills QuestionnaireDocument4 pagesGrammar Skills QuestionnaireemanNo ratings yet
- Atoms and Molecules Multiple Choice Questions SolvedDocument7 pagesAtoms and Molecules Multiple Choice Questions SolvedDevendra ShuklaNo ratings yet
- Introduction To Structural AnalysisDocument15 pagesIntroduction To Structural AnalysisShereen RodrigoNo ratings yet
- Introducing and Installing Linux SystemDocument37 pagesIntroducing and Installing Linux SystemfdsaaNo ratings yet
- Surveying NotesDocument7 pagesSurveying NotesTrina SambasNo ratings yet
- Projet Hosseini2015Document11 pagesProjet Hosseini2015Høussàéîn Bèn MéssâõûdNo ratings yet