Professional Documents
Culture Documents
4-1 HandBook PDF
Uploaded by
prabhaOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
4-1 HandBook PDF
Uploaded by
prabhaCopyright:
Available Formats
Dept.
of MECH
MLR Institute of Technology
(Affiliated to JNTU & Approved by AICTE)
Dundigal, Quthbullapur Mandal, R.R. Dist.- 500 043.
Ph: 08418 – 204066, 204088, 9866755166
1.GENERAL INFORMATION
About the College
1.1 BEAUTIFUL CAMPUS:
Set in Sylvan surroundings away from the hustle & bustle of city life yet only 4
km away from Mahindra Satyam Technology Park on Balanagar – Narsapur state
highway, the Institute is extremely conducive to academic, co-curricular and
extra-curricular activities. It has large and well ventilated buildings with modern
equipment in place and “State of the art”, sports facilities.
HIGHLIGHTS:
1.2 FACULTY:
The College is proud to have the best faculty, a blend of experienced and
academics with eminent academicians team IIT’s, NIT’s and other reputed
organizations teaching at the Institute that makes MLRIT as one of the best
Institute pursue B.Tech, M.Tech,MCA and MBA as one of the under JNTU
Hyderabad. The faculty is constantly encouraged to upgrade their qualifications
and a number of them have enrolled for Ph.D. Most of the faculty members have
been empowered with High Impact teaching under Wipro Mission 10X program.
1.3 INFRASTRUCTURES:
The Institute is housed in a RCC Building with a built up area of 2.50 Lakh Sq. Ft
in 10 Acres and established an Air Conditioned Auditorium with Seminar Halls
and a Central Library. A good canteen caters hygienic food and a fleet of buses
running from all important points to bring the students to the college.
Accessibility of HDFC Bank ATM within the Campus is an recent addition to
enable students and faculty to withdraw cash anytime.
1.4 LABORATORIES:
The Institute has State of the art laboratories with 500 plus Pentium IV Branded
Systems equipped with latest hardware and software with online testing facility
catering to the needs of CSE, IT. The Institute also has well equipped Electronic
Labs, Aeronautical Engineering Labs and Workshops for ECE and Aeronautical
Engineering Students. The college has recently established Microsoft, IBM for
CSE/IT cadence lab for VLSI design and CATIA Aeronautical Design Lab.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 1
Dept. of MECH
1.5 TOEFL CENTRE:
The Institute is an Authorized TOEFL iBT Centre, which will conduct tests all
through the year as per the IBT schedule.
1.6 ENGLISH LANGUAGE LABORATORY:
The Institute has established Ultramodern Computerized English language
Laboratory with 60 plus Computer Systems loaded with latest Software to
enhance the Softskills of Students to make the Students Industry ready.
1.7 R&D Cell:
The Institute has an R&D Cell under the Chairmanship of ?. The R&D cell
undertakes externally funded R&D projects from agencies like AICTE, DST,
UGC and other similar state, private and society / trust bodies. It also undertakes
research publications and interactions of faculty members with outside world.
1.8 LIBRARY:
The Institute Library has over 14598 books and 78 National and International
journals that are required to all branches of Engineering. The Institute has the
unique distinction of becoming Member of DELNET that connects more than 700
libraries in Asia Pacific Region. The Library has 35 Computers with 10 MB PS,
Internet Facility that makes our knowledge Savvy Students to be technically
competent on par with Industry professionals.
1.9 NATIONAL PROGRAMME ON TECHNOLOGY ENHANCED
LEARNING (NPTEL)
The main objective of NPTEL program is to enhance the quality of engineering
education in the country by developing curriculum based video and web courses.
This is being carried out by seven IITs and IISc Bangalore as a collaborative
project. In the first phase of the project, supplementary content for 129 web
courses in engineering / science and humanities have been developed. Each c
ourse contains materials that can be covered in depth in 60 or more lecture hours.
In addition, 110 courses have been developed in video format, with each course
comprising of approximately 60 or more one-hour lectures. In the next phase
other premier institutions are also likely to participate in content creation.
1.10 CO-CURRICULAR ACTIVITIES:
The Institution organizes Local Industrial Visits to Organizations like
DOORDARSHAN, BSNL, and to Student Conferences like HYSEA,Student
Conference at INFOSYS, Gachibowli Campus, and Government Sponsored
Summits like INDO SOFT IT Summit at Hitex City Convention Centre to
Interface with the Industry for Career Planning and to make them Industry
Ready. The Institute focuses on Techno Management Events like Technonium
and Zavtra to enhance the Technical Skills and Soft Skills to make them
Employable.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 2
Dept. of MECH
1.11 PROFESSIONAL BODIES:
MLR Institute of Technology has the unique distinction of becoming
Institutional Member in Professional bodies such as Confederation of Indian
Industry (CII), Aeronautical Society of India (AeSI), Computer Society of India
(CSI), Institute of Electronics and Telecommunication Engineering (IETE),
Indian Society of Technical Education (ISTE), ELIAP and Hyderabad
Management Association.(HMA)
1.12 EXTRA-CURRICULAR ACTIVITIES:
The Institute helps the B.Tech, M.Tech and MBA Students to imbibe Culture,
Knowledge and Sportsman Spirit during their Study Period.
The Institution has a Basketball Court ,Volley ball Court, Beach Volley ball
Court, Cricket Stadium with 400 meter Excellent track for Athletic Meet and
Indoor Stadium for Shuttle Badminton and Gymnasium. MLRIT has been
regularly conducting JNTU Zonal Games Football, Cricket, and State level
Volleyball Tournaments. The Institute has been awarded as the best organiser
for conducting JNTU Zone A Intercollegiate Tournaments by JNTUH. MLRIT
is affiliated to Hyderabad Cricket Association (HCA) to play league Cricket
Matches. The college has conducted 5K RUN in 2008-09 and south zone
Cricket Tournament in 2009-10.The college has been conducting JNTU-H
Cricket Tournament in 2009-10.
The Institute also organises events like Traditional Day, Annual Day, Fashion
Shows, Rockshows and other Cultural Events. MLR Institutions has been
conducting Traditional Day every year. The purpose of Celebrating traditional
day is basically to imbibe a spirit of Oneness, where the First year Students who
have joined the Institute shed their Inhibitions, play and dine together with their
seniors and recollect the old traditions & glory of the Past.
Apart from that the traditional day is being celebrated with a purpose of
removing fear and as a measure of Anti-Ragging activity.
The college has a National Service Scheme (NSS) unit, which conducts a
number of programmes viz blood donation camp, tree plantation, community
services in the adjoining villages, flood relief, etc. The college has sent a team of
volunteers for flood relief service on 14th October 2009 to Mahaboob Nagar.
1.13 STUDENTS COUNSELING & CAREER SERVICES DEPT
(SCCS – DEPT):
MLRIT is only institution among 600 + professional colleges in AP, that takes
into consideration each student individual aspiration and ambition into audit,
and extend support on exclusive basis to each student for successful future into
Employment/ Entrepreneur/ Research & Development / Higher Education
before graduating from our campus.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 3
Dept. of MECH
1.14 FINISHING SCHOOL:
MLR Institute of Technology is the only Institute which offers Speical Training
Programme partnering Institute for Electronic Goverance, Govt of A.P. and
Infosys. The students from the Institute are selected every year and given special
Training programme to make them Industry Grade and opportunity is given to
them to place themselves in Multi National Companies.
1.15 IN HOUSE PROJECTS:
The students are taking part in International Project competitions hosted by
major MNCs, like IBM, Microsoft and Infosys. The Great Mind Challenge
hosted by IBM, Microsoft Imagine Cup and project work as part of foundation
programme conducted under the aegis of Infosys are some of the important
projects presently being undertaken by the students of MLRIT. Further, the
students are encouraged to do In House Projects under the supervision of expect
faculty members.In addition,students are encouraged to give innovative ideas
and do projects under the aegis of Microsoft academic innovative alliance.
1.16 MOUs:
The Institute has MOUs for student and faculty enhancement programmes with
Multi National Companies like
➢ IBM
IBM has extablished “Center of Excellence” in MLRIT
➢ Sun Microsystem Systems
Student Development Programmes and Certificates
➢ Oracle
Faculty and Student Development Programmes
➢ WIPRO: Mission – 10X Programme
Faculty impact teaching programme
➢ CA Labs
Student and Faculty enablement Programme
➢ Infotech
To enhance the quality of educational experience for student community
➢ Mahindra Satyam
Industry Oriented course ware and Technology
➢ Institute of Electronic Governance
Faculty Enablement Programme on “Soft Skills, Technical Skills, Reasoning
and Aptitude and
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 4
Dept. of MECH
Basic Computer Skills”.
➢ Indo – US Collaboration for Engineering Education
Faculty Development Programme sponsored by Infosys
➢ Microsoft IT Academy
• Student and Faculty enablement programme.
• Microsoft-Academic Innovative Alliance.
➢ Infosys
Foundation Programme for students
➢ IIIT, Gachibowli, Hyderabad
Certification in Information Technology (CIT) for students
➢ SAM Technologies
In house projects in Robotics and Embedded System
1.17 Student Achievements:
➢ Ms. R. PALANIAMMAL of Aeronautical Engineering department has
secured a University Rank and Gold Medal for the batch 2005-2009
➢ A PRAVEEN KUMAR secured 105th rank in GATE.
➢ Rishit D Shah became the Microsoft Student Partner and Microsoft Student
Campus Ambassador. He is a Microsoft Certified Professional.
➢ N. Sai Praneeth & EaswarReddy also has been selected as a Microsoft
student ambassador.
➢ M.Prashanth Reddy and M. Ramya of CSE Department have been selected
as the Student Ambassador for IBM.
➢ The CSE department students Nikhil Bharadwaj, Shashank and Sulibhavi
Santhosh developed a Google Application connecting all the institute
activities. Lolitha and Gangasudha of IT, Praneeth, Rajender, Akshay Raj,
Harish and Pankaj of CSE, Achuth and Gautam of Aero are maintaining the
application.
➢ M. Pavan Kumar of CSE Department has been selected as brand
Ambassadir if Sun Academic Initiative.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 5
Dept. of MECH
➢ 253 students and 5 faculty members have got IBM DB2 Certification as part
of TGMC’09
➢ The Institute has achieved 100% results in Aeronautical Engineering, 99%
in CSE, 94% in ECE, 91% in MCA and 83% in MBA Department for
outgoing batches.
➢ The students of MLRIT have won Volleyball Tournament and were
Runner’s in Table Tennis Singles and Dobules JNTU Zone ‘A’ Inter
Collegiate Tournament.
➢ G. Manikanta Gupta, ECE 1st year won “National memory championship”
in abstract imagaes, organized by Worl Memroy Council.
1.18 Contact Information
Principal Prof. Dr. P. Bhaskara Reddy 9866678599
Dean (CS) Prof. K. L. Chugh 9866666601
Department Head CSE Mr.G.Kiran Kumar 9959535832
Department Head ECE Mr. S.V.S Prasad 9160404638
Department Head IT Dr. KVSN Rama Rao 9848292046
Department Head AERO Dr.M.S.N.Guptha 9160404640
Department Head MECH DDr.S.Madhu 9160404635
Department Head MBA Ms. K. Sruhullekha 9160404639
Department Head H&S Mr. Prabhakar 9848472797
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 6
Dept. of MECH
2. PLACEMENT & HIGHER STUDIES
MLR Institute of Technology has a unique distinction of placing their First Batch of
B.Tech Students in their prefinal year of Study and MBA Students in Multi National
Companies. The Institute has so far interacted with more than 69 Companies and 233
Selections from B.Tech/MCA and MBA Programmes have taken Place.
In this direction Apart from the Placements the Institute has arranged Summer
Internship Programmes with Companies like Computer Amociates, Mind Tree M/s
Infotech Enterprises Ltd, Mahindra Finance, Max New York Life Insurance, Nokia Ltd
, Mahindra Finance, Bajaj Capital Ltd, Reliance Money and Tata AIG for Engineering
and MBA Students to develop Mentor Relationships and to get to know about the Work
Culture and gain Competencies to make them Industry Ready during their Study period.
The Institute has arranged Campus Recruitment drives with MNC’s like TATA
Advanced systems, IBM, Medha Sevo drives, NR Radio & Switches Pvt. Ltd., Osi
Technologies ltd., Genpact, Reliance Money, Nagarjuna Cements Ltd & Oasis
Software Informatics.
The Institute ortganized an Industrial Tour to 3rd & 4th Year Aeronautical Engineering
students to Satish Dawan Space Center (SHAR) Sriharikota on 16-12-2009. The 4th
Year students visited Airforce Academy, Dundigal, for an Industrial Visit on 22-12-
2009.
The CSE & ECE students visited Infosys Infosys on 18-07-2009 for the SPARK
Programme which is an orientation programme on Information Technology Space.
2.1 INDUSTRY GRADE SKILLS REQUIRED FOR EMPLOYMENT
Behavioral and Communication Skills are recognized as important elements in
professional development of an Engineer including English for specific purposes.
Employers give considerable value to these diverse set of skills at the time of
interviews.
In addition to course curriculum, every student will gain the following skills
during the study period:
➢ Analytical and Problem solving skills
➢ Subject – specific knowledge
➢ Research and improved decision making abilities
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 7
Dept. of MECH
➢ Oral communication skills
➢ Managerial skills
➢ Understanding of other cultures
➢ Confidence and competence to work in International environment
As students are the future leaders, the Responsibility, Accountability and exhibiting
the leadership skills should start from the first year of engineering. Every student is
advised to read / practice from the following books;
➢ Verbal and Nonverbal by RS Agarwal
➢ Baron GRE
➢ Wren and Martin English Grammer Book
2.2 IMPORTANT CRITERIA OF EMPLOYMENT
In addition to the industry grade skills required for employment, the most
important criteria for employment is that the student should get a minimum of
60% in academics with no backlogs to make them eligible for campus
recruitments. In the recent past, many companies stipulated a cut of 68% for
attending the interview / writing the test. Every student should Endeavour to
achieve a minimum of 68% with no backlogs to make them suitable for picking
up by good companies.
Job Portals:
1. www.freshersworld.com
2. www.monster.com
3. www.naukri.com
2.3 HIGHER STUDIES
M.Tech
The Graduate Aptitude Test in Engineering (GATE) is an all-India examination
administered and conducted in eight zones across the country by the GATE
Committee comprising faculty from Indian Institute of Science, Bangalore and
seven Indian Institutes of Technology on behalf of the National Coordinating Board
- GATE, Department of Education, Ministry of Human Resources Development
(MHRD), and Government of India.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 8
Dept. of MECH
Objective
To identify meritorious and motivated candidates for admission to Post Graduate
programmes in Engineering, Technology, Architecture and Pharmacy at the National
level. To serve as benchmark for normalization of the Undergraduate Engineering
Education in the country. This provides an opportunity for advanced engineering
education in India. An M.E or M.Tech degree is a desirable qualification for our
young engineers seeking a rewarding professional career. Engineering students,
while in the final year of their degree course, spend considerable time in seeking an
opening for studies in foreign universities. The students are advised to pursue
M.Tech in IIT’s/NIT’s/University Colleges.
MBA
Earning a Master’s of Business Administration (MBA) degree can provide you with
management skills and business expertise that open new career opportunities to you.
An MBA program will also launch you into the much higher pay range that upper
level managers and executives enjoy. Furthermore, in the high-level positions, an
MBA degree will allow you to hold and your work will often be more interesting and
rewarding. The students are advised to pursue M.BA in IIM’s/XLRI/Reputed
Business Schools.
HIGHER STUDIES ABROAD
TOEFL is mandatory for seeking admission in any academic course at any level-
undergraduate, graduate or post graduate, in USA and Canada. Similarly UK
Universities ask for IELTS for seeking admission to graduate and past graduate
courses.
GRE The Graduate Record Examination (GRE) is administered by the Educational
Testing Services (ETS) for admission into all graduate academic programs (except
management) in universities across USA and Canada and some selected universities
across the world including India. The exam is a Computer Adaptive Test and is
administered at any of the Sylvan testing centers in the country after prior
registration.
The GMAT is a Computer Adaptive Test administered online by Educational Testing
Services (ETS) through Sylvan testing centers located in all the major cities in India.
Those who wish to enroll for courses in Business Management in American
universities have to take the GMAT test and submit their scores to the department.
2.4 VARIOUS SCHOLARSHIPS AVAILABLE IN INDIA
Bharat Petroleum Scholarship For Higher Studies | Balarama Digest Scholarship |
Central Institute of Indian Languages | Fair & Lovely Foundation - Project Saraswati
Scholarships | Government Of India Office of the Director General of Civil Aviation
Scholarship | Homi Bhabha Centre For Science Education Tata Institute of
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 9
Dept. of MECH
Fundamental Research Research Scholarships | HSBC Scholarships | Indian Council
Of Agricultural Research Award Of National Talent Scholarship In Agriculture |
Indian Institute Of Geomagnetism Research Scholars | Invention Awards For School
Children | Indian Oil Corporation Ltd (IOCL) - Scholarships | Jawaharlal Nehru
Memorial Fund Jawaharlal Nehru Scholarships For Doctoral Studies | Junior
Research Scholarships For Cancer Biology Tata Memorial Centre & Tata Memorial
Hospital | Jaigopal Garodia Vivekananda Trust Scholarships | Lalit Kala Akademi -
Scholarship | Mahindra All India Talent Scholarships For Diploma courses In
Polytechnics | National Brain Research Centre Scholarships | NTPC Scholarships |
National Institute Of Science Communication And Information
Resources(NISCAIR) | National Olympiad Programme | National Level Science
Talent Search Examination - 2005 | Narotam Sekhsaria Scholarship Programme |
National Brain Research Centre Scholarships, Post Doctoral Fellowships | National
Aptitude Test | NIIT National IT Aptitude Test | Oil And Natural Gas Corporation
Ltd (ONGC) Scholarships To SC/ST Students | Office Of The Director General of
Civil Aviation Scholarships Stipend to the SC/ST Candidates | Rashtriya Sanskrit
Sansthan - Scholarships | Scholarships To Young Artistes | Saf-Madanjeet Singh
Scholarship | Sports Authority Of India - Sports Scholarships | SAF-Madanjeet Singh
Scholarship | Spic Macay Scholarships | The Childrens Foundation - Scholarships |
The L&T Build-India Scholarship | The Hindu-Hitachi Scholarships | The Paul
Foundation Scholarships | Technology Information Forecsting and Assessment
Council(TIFAC) Women Scientist Scholarship Scheme | The Young Talent IT
Scholarship The Dr.GB Scholarships Foundation |
2.5 VARIOUS INTERNATIONAL SCHOLARSHIPS AVAILABLE IN INDIA
A * STAR India Youth Scholarship | A.M.M. Arunachalam-Lakshmi Achi
Scholarship For Overseas Study | British Chevening Scholarships | Bharat Petroleum -
Scholarships for Higher Studies | Cambridge Nehru Scholarships | Commonwealth
Scholarship and Fellowship | Czech Government Scholarship | Chevening Technology
Enterprise Scholarship Programme | Chinese Government Scholarship | Greek
Government Scholarships | Israel Government Scholarship | Iranian Government
Scholarship | Offer of Italian Government Scholarship | Japanese Government
Scholarships | K.C.Mahindra Scholarships For Post-Graduate Studies Abroad | Lady
Meherbai D.Tata Scholarships | Mexican Government Scholarship | Norwegian
Government Scholarships | National Overseas Scholarships/Passage Grant for ST
Candidates | Portuguese Government Scholarships | Sophia Merit Scholarships Inc |
Slovak Government Scholarship | SIA Youth Scholarships | The Rhodes Scholarships
India | The Ramakrishna Mission Institute Of Culture Award of Debesh-Kamal
Scholarships For Studies Abroad | The Inlaks Foundation - Scholarships |
Website for Higher Studies:
1. www.higherstudyabroad.org
2. www.highereducationinindia.com
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 10
Dept. of MECH
3. STUDENT CAREER ORIENTED PROFESSIONAL CERTIFICATION
COURSES
As per the career plan for students of MLR Institute of Technology with a view to bridge
the gap between Industry and Academia, it has been planned to equip every student with
at least three International / National certification by the time he / she completes the
course of study. The details of the certification courses are given below:
Branch Year Name of the Certification Course
2nd Year Certificate Information Technology
IBM Certified DB2 Database
3rd Year
Computer Science and Associate, Infosys Campus Connect
Engineering / IT / MCA IBM Certified Rational Application
4th Year
Developer
4th Year SUN Certified Java Programmer
Institute of Electronics and
2nd Year
Telecommunication Engineering
Electronics and Communication
3rd Year Motorola @ CAMPUS
Engineering
IBM Certified DB2 Database
4th Year
Associate
2nd Year Certificate in AutoCAD
Aeronautical Engineering 3rd Year Certificate in HighPerMesh
4th Year Certificate in CATIA
2nd Year Certificate in AutoCAD
Mechanical Engineering 3rd Year Certificate in HighPerMesh
4th Year Certificate in CATIA
3.1 Help Desk
The college has set up a Help Desk for Career Guidance and overseas education. The
aim of the Help Desk is to provide a flatform for the students to choose the Right
Destination. The students can reach the Help Desk in person or through mail at email id
helpdesk@mlrinstitutions.ac.in
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 11
Dept. of MECH
4. PERFORMANCE MONITORING AND GUIDANCE
4.1 STUDENT FEEDBACK
In case the students find it difficult to cope up / understand a particular subject,
they are
advised to discuss it with
a. The Concerned Teacher
b. The Class Teacher
c. The Department Head
d. The Principal
Students can use the suggestion boxes for communicating feedback. Students
should mention their names so that they can be informed of the progress / more
details / clarifications can be obtained.
4.2 CLASS TEACHER
Every class is assigned a Class Teacher (a faculty member). Students can directly
discuss their college related or personal problems related to studies with them. The
Class Teachers are accessible to the students and they can talk to the Class Teacher
or whenever they are free from class / lab work. Class Teacher will meet with the
class representative on daily basis to discuss their day-to-day difficulties if any.
4.3 CLASS REPRESENTATIVES AND THEIR ROLES
Two students from each class are selected as the Class Representatives from the
department basing on their academic performance and discipline. Department Head
makes the selections.
Responsibilities of the Class Representatives:
➢ Collection of MIS format from Class Teacher daily.
➢ Communicating the departmental / college directives & information to the
students.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 12
Dept. of MECH
➢ Collecting the feedback of difficulties faced by the students and
communicating Suggestions for improvements.
➢ Coordinating academic events and co-curricular activities.
➢ Encourage students to interact for better studies, sharing books and notes.
➢ Compilation and submission of MIS form to class teacher at the end of
the period.
4.4 PERFORMANCE COUNSELING
Mentors will evaluate the student individually for the following:
a. Less marks in internal exams
b. Continuous absence (3 days) and shortage of attendance
c. Not understanding the subject
d. Students from Telugu medium
e. Assistance for back log subjects etc.
f. Communication with parents
g. Provide help to back log students
4.5 REMEDIAL CLASSES / TUTORIAL / REVISIONS
Remedial Classes are conducted for students who are weak and who do not perform
well in their internal examinations / class tests or for the students who want extra
help. Slots in the time table have been reserved for Tutorial where in the students are
helped to solve the question in the class itself.
4.6 BACKLOG MANAGEMENT
The Mentors maintain a complete record of Examination results of each student and
they counsel and guide them in preparing for backlogs. Students are provided with
material and important questions are discussed.
4.7 CORRESPONDENCE WITH PARENTS
Parents will be informed about the performance of their ward from time to time in
the semester. However parents are requested to be in touch with the Student mentor /
Department Head on a regular basis.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 13
Dept. of MECH
5. RULES AND REGULATIONS FOR STUDENTS
5.1 ADMINISTRATIVE
1. Students, admitted into this College, are deemed to have agreed to the rules and
regulations of the college, as laid down by the College Authorities from time to
time, and the rules lay down in this leaflet, issued at the time of admission.
2. Students should inform any changes in the addresses/Phone No. of their
parents / guardians to the college office.
3. The college shall communicate to the parents \ guardians of the students from
time to time regarding the regularity and performance in the examinations of
their wards. The case of serious indiscipline on the part of the students (s) may
also be communicated to parent (s) \ guardian (s).
5.2. ACADEMIC
1. Students should attend the classes in - time. Late- comers shall not be
permitted to enter the class room and they are likely to loose the attendance.
2. Students are expected to be regular to the classes. The students Shall not absent
themselves for classes without prior approval. Prior permission shall be taken
from concerned counselor and submitted to the Head of the Department.
3. In case of ill-health, the student should submit the medical certificate along
with prescription, etc., from a registered medical doctor. The student should
get the medical certificate within two days from the date of reporting to the
college after iII health and also produce a letter from Father/ Mother
regarding ill-health. Permission on medical grounds shall not be granted for one
or two days.
4. The students should come to the laboratories with the prescribed uniform.
5. If a student disturbs the class or makes mischief, he / she will be marked
absent and may be expelled from the class.
6. Students shall spend their leisure time in the library/computer center.
7. Students are expected to put up the minimum aggregate percentage of
attendance (75%) as laid down by the JNT University. Students, falling short
of 75% of attendance shall not be promoted to the next Semester \ Class.
8. Parents \ guardians of the students can contact the college authorities either in
person or by post regarding discipline, regularity in attending classes,
performance in the examinations, etc., of their wards.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 14
Dept. of MECH
5.3 DRESS CODE
1. Students are expected to attend the college properly dressed. They should
wear the prescribed uniform while attending laboratory classes.
2. Students are expected to carry the identity cards, issued by the college, in the
campus. They are required to show the identity cards at the library, computer
center, office, etc. Students without Identity Cards are not allowed in to the
laboratory classes.
5.4 DISCIPLINE & PUNCTUALITY
3. No student shall enter or leave the class room without the permission of the
teacher.
4. Calling students out of their class rooms while the lecture is in progress is
prohibited.
5. Students are required to help in keeping the rooms, buildings, and premises
clean and tidy. Writing or sticking up of posters and notices on the walls is
strictly prohibited.
6. Smoking, Consumption of alcohol, intoxicating drinks or drugs is strictly
prohibited in and around the college premises. Those indulging in such
activities will be put severely or expelled.
7. Students are expected to behave well with the staff, other students and the
general public. Any misbehavior, coming to the notice of the college
authorities, will be severely dealt with.
8. The conduct of the students should be exemplary not only within the premises
of the college but also outside. This will help in maintaining the image and
status of the college.
9. Students are required to observe silence at all times in the college campus.
They shall not talk in loud tone or call each other by shouting.
10. Students are prohibited from loitering in the verandahs / campus during class
hours, and sitting on the steps, stair-cases or parapet walls.
11. Students are not permitted to resort to strikes and demonstrations within the
campus. Participation in such activity entails their dismissal from the college.
Any problem they face may be represented to the Counselor / Head of the
Department / Principal.
12. Students are prohibited carrying Cell Phones and organizing any meeting or
entertainment in the college campus without the permission of the college
authorities.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 15
Dept. of MECH
13. The entry of outsiders without permission is prohibited. Any student found
responsible for bringing outsiders into the campus for settling personal disputes
with other students, shall be expelled from the college.
14. The college is entitled to take any disciplinary action, which is deemed
necessary in the case of any indiscipline on the part of the students. The same
will be reflected on the Conduct Certificate issued at the time of leaving the
college.
15. No Student Unions, except Professional Associations, are permitted in the
college.
16. If the students cause any damage to the college property knowingly or
unknowingly individually or in a group they have to pay 5 times to cost of
property damaged them. All the students are collectively responsible for the
proper maintenance college property i.e. building, furniture, lab equipment,
garden, playgrounds, etc., recovery, calculated on semester to semester basis,
will be collected along with examination fee for the semester.
17. Students should keep their vehicles only at the parking place allotted for the
purpose. Vehicle riding in the campus is strictly prohibited.
18. Sitting on the parapet wall and Riding beyond the parking limits, the fine will
be imposed to Rs.100.00
19. Breakage or loss of equipment /property as decided by the appropriate
authority The Principal/Director may, on the recommendation of the Head of
the Department, or otherwise, inflict the following punishments in the interests
of the student discipline and the Institution: fined, curtailment attendance,
denial of promotion to next semester, suspension, expulsion or such other
action as deemed necessary for the maintenance of discipline in the campus.
5.5. LAB CLASSES
All students must attend lab classes without fail. Those absent shall follow this
procedure laid down in the prescribed format explaining valid reasons and obtain
permission to attend the future classes.
5.6 FEE
1. All students admitted into this college, will be required to pay the prescribed
tuition fee and other specified fees. Failure of the same will result in the
cancellation of admission. No portion of fees will be refunded under any
circumstances. If any student wishes to change the college or discontinue the
course at any point for any reason, he \ she shall not be permitted to do so unless
he \ she pays balance amount of four years fees which he \ she would have to pay,
if he \she continued till the completion of the course. His \ Her original
certificates including I.e., etc., will be issued only after all the dues as stated
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 16
Dept. of MECH
above, are cleared by the students. All senior students must pay the college fee
every year on or before the 15th of July irrespective of the reopening of the
college. If they fail the fine will be imposed as per norms of the management.
2. Miscellaneous fee paid for expenditure related to training programs i.e., technical
or soft skills etc., is not refundable.
3. Other than the above, if any fees are levied by the University the student has to be
pay the same.
5.7. TRANSPORT
All students who are availing the college bus facility must carry the bus-pass and
must produce when demanded, failing which they will not allowed to travel in the
bus. All students must travel in the allotted bus and routes. They should not change
but occupy only their allotted seats throughout. Unauthorized students caught in the
bus for not having the bus pass, should pay even if they traveled for one day also.
First and second year are not allowed to bring two-wheelers.
5.8. LIBRARY RULES
1. Library Books will be issued for 15 days time and renewal depends upon the
demand of the book.
2. Silence should be strictly maintained in the library.
3. Students are responsible for the library borrower card issued to them. Loss of the
library card should be reported in writing to the circulation section immediately.
Duplicate library borrower card will be issued on payment of Rs.150/- after a
week time from the date of application for duplicate cards.
4. The Library borrower card is not transferable.
5. Library books must be returned on or before the due date. Any student
failed to do so, 1st week –Rs.1/-per day/per book, 2nd week – Rs.2/-per day/per
book and 3rd week –Rs.3/-per day/per book penalty will be imposed From 4th
week-Rs.5/-per day/per book penalty will be imposed.
6. Students shall not make any sort of conversation in any part of the library, causing
inconvenience to others.
7. Students shall not bring their belongings inside the library and should keep them
outside the library.
8. Students leaving from the library should be checked at the exit.
9. Tearing of pages/stealing of books will invite suspension from using of the library
facilities and further disciplinary action will be taken against such students, as per
college norms.
10. The borrower shall replace the New book within 7 days, otherwise, he/she has
to pay 3 times of the book cost, along with fine. In case of lose of book.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 17
Dept. of MECH
5.9. GENERAL
1. All the students admitted in this college have to give an undertaking to abide by
the rules and regulations of this college in prescribed format given by the
college.
2. All the students should attend the college after vacations (Dasara / Sankranthi /
Christmas / Semester term / summer) on the re-opening day without fail.
3. Students must deposit all the relevant original certificates and documents at
the time of the admission Office and they will not be returned until completion of
the course.
4. Admission of any student can be cancelled by the Management at any point
during the course for reasons which are not in consonance with the rules and
regulations and which are detrin the reputation of the college.
5. All the Students are here by informed that college authorities will not take any
responsibility for loss or theft of your valuable items and money kept in your
bags or some where else. Hence I request all the students are not to keep your
valuables in class room or anywhere without your presence.
6. Fee For Issue Of Duplicates
a) Duplicate Hall ticket Rs. 100.00
b) Duplicate Identity Card Rs. 100.00
c) Duplicate College Bus Pass Rs. 50.00
d) Duplicate Study Certificate for same purpose Rs. 50.00
e) Xerox copies of OD’s Rs. 50.00
All Breakage etc., penalties will be displayed on the Notice Board, and must be
paid by the student and no student will be allowed to write examination or internal
test or laboratory test, if penalties are not paid by the due date specified in the
notice or circular.
5.10. RAGGING
Ragging in any form inside or outside the college campus is banned/Prohibited
vide Ragging Act 26 of AP. legislative Assembly 1997. Those who indulge in this
uncivilized activity are liable for severe disciplinary actions besides being liable
for prosecution.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 18
Dept. of MECH
SALIENT FEATURES
Ragging means doing an act which causes or is likely to cause insult 'or annoyance or
fear or apprehension or threat or intimidation or outrage of modesty or injury to a
student.
S.No. Nature of Ragging Punishment
Imprisonment Upto 6 Month
Teasing, Embarrassing and Humiliating
1 or Fine Upto Rs 1000/- or
Both.
Assaulting or using criminal Force or Imprisonment Upto 1 Year or Fine
2
criminal intimidation Upto Rs 2000/- or Both.
Wrongfully restraining or Confining or Imprisonment Upto 2 Years or
3
causing hurt Fine Upto Rs 5000/- or Both.
Causing grievous hurt kidnapping Or Imprisonment Upto 5 Years or
4
raping or committing unnatural offence Fine Upto Rs 10000/- or Both
Imprisonment Upto 10 Years or
5 Causing death or abating Suicide
fine Upto Rs. 50000/- or Both
Note:
1. A student convicted of any of the above offences, will be, dismissed from the
college.
2. A student imprisoned for more than six months for any of the above offences 'will
not be admitted in any other College.
3. A student against whom there is prima facie evidence of ragging in any form will
be suspended from the college immediately.
Prohibition of Ragging
1.Ragging is prohibited as per act 26 of AP. Legislative assembly, 1997.
2.Ragging entails heavy fines and/or imprisonment.
3.Ragging invokes suspension and dismissal from the college.
4.Outsiders are prohibited from entering the college premises without permission.
5.All students must carry their identity cards and show them when Demanded.
6.The principal and staff will visit and inspect the rooms at any time.
7.Suspended students are debarred from entering the campus except when required to
attend enquiry and to submit an explanation .
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 19
Dept. of MECH
6. ACADEMIC REGULATIONS R13 FOR B.TECH.
(REGULAR)
(Effective for the students admitted into I year from the Academic Year 2013-14
onwards)
6.1. AWARD OF B.TECH. DEGREE
A Student will be declared eligible for the award of the B.Tech. Degree if he fulfills
the following academic regulations:
i) Pursued a course of study for not less than four academic years and not more
than eight academic years.
ii) Register for 200 credits and secure 200 credits.
iii)The candidate shall register for 224 credits and secure 216 credits with compulsory
subjects as listed in Table-1.
Table 1: Compulsory Subjects
Serial Number Subject Particulars
1 All practical subjects
2 Industry oriented mini project
3 Comprehensive Viva-Voce
4 Seminar
5 Project work
6.2. Students, who fail to fulfill all the academic requirements for the award of the
degree within eight academic years from the year of their admission, shall forfeit their
seat in B.Tech Course.
6.3. COURSES OF STUDY
The following courses of study are offered at present as speciliaztions for the B.Tech
courses.
B ranch Code Branch
01 Civil Engineering
02 Electrical and Electronics Engineering
03 Mechanical Engineering
04 Electronics and Communication Engineering
05 Computer Science Engineering
08 Chemical Engineering
10 Electronics and Instrumentation Engineering
12 Information Technology
14 Mechanical Engineering (Mechatronics)
17 Electronics and Telematics Engineering
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 20
Dept. of MECH
18 Metallurgy and Material Engineering
19 Electronics and Computer Engineering
20 Mechanical Engineering (Productions)
21 Aeronautical Engineering
22 Instrumentation and Control Engineering
23 Biotechnology
24 Automobile Engineering
25 Mining Engineering
26 Mining Machinery
27 Petroleum Engineering
28 Civil and Environmental Engineering
29 Mechanical Engineering (Nano Technology)
30 Agricultural Engineering
31 Computer Science & Technology
6.4. CREDITS
I Year Semester
Periods / Week Credits Periods / Week Credits
Theory 03+1/03 06 04 04
02 04 --- ---
Practical 03 04 03 02
03 02
Drawing 02+03 06
06 04
Mini Project --- ---- --- 02
Comprehensive Viva
--- -- --- 02
Voce
Seminar --- --- 6 02
Project --- --- 15 10
6.5 DISTRIBUTION AND WEIGHT AGE OF MARKS
i. The performance of a student in each semester / I year shall be evaluated
subject – wise with a maximum of 100 marks for theory and 75 marks for
practical subject. In addition, Industry oriented mini-project, seminar and
project work shall be evaluated for 50,50 and 200 marks respectively.
ii. For theory subjects the distribution shall be 25 marks for Internal
Evaluation and 75 marks for the End-Examination.
iii. For theory subjects, during the semester there shall be 2 midterm
examinations. Each mid term examintin consists of one objective paper,
one essay paper and one assignment. The objective paper and the minutes
(20 minutes for objective and 60 minutes for essay paper). The Objective
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 21
Dept. of MECH
paper is set with 20 bits of multiple choice, fill in the blanks and matchinjg
type of questions for a total of 10 marks. The essay paper shall contain 4
full questions (one from each unit) out of which, the student has to answer 2
questions, each carrying 5 marks. While the first mid-term examination
shall be conducted on 1 to 2.5 units of the syllabus, the second mid-term
examination shall be conducted on 2.5 to 5 units. Five (5) marks are
allocated for Assignements (as specified by the subject teacher concerned).
The first Assignment should be submitted before the conduct of the fiest
mid-examination, and the second Assignment should be submitted before
the conduct of the second mid-examination. The total marks secured by the
student in each mid-term examination are evaluated for 25 marks, and the
average of the two mid-term examinations shall be taken as the final marks
secured by each candidate. However, in the I year, there shall be 3 mid
term examination, each for 25 marks, along with 3 assignments in a similar
pattern as above (Ist mid shall be from Unit- I, 2nd mid shall be 2 & 3 Units
and 3rd mid shall be 4 & 5 Units) and the average marks of the
examinations secured (each evaluated for a total of 25 marks) in each
subject shall be considred to be final marks for the internals/sessionals. If
any candidate is absent from any subject of a mid-term examination, an on-
line test will be conducted for him by the University.
The details of the Question Paper pattern wihtou deviating from the R13
regulations as notified in the webiste is as follows:
o The End semesters Examination will be conducted for 75 marks
which consists of two parts viz i) Part – A for 25 marks, ii) Part-B
for 50 marks.
o Part-A is compulsory question which consists of ten sub-questions.
The first five subquestions are from each unit and carries 2 marks
each. The next five sub-questions are one from each unit and
carriers 3 marks each.
o Part-B consists of five questions (numbered from 2 to 6) carrying
10 marks each. Each of these questions is from one unit and may
contain sub-questions. For each question there will be an “either’
“or” choice (that means there will be two questions from each unit
and the student should answer any one question)
iv. For practical subjects there shall be a continuous evaluation during the
semester for 25 sessional marks and 50 end examination marks. Out of the
25 marks for internal, day-to-day work in the laboratory shall be evaluated
for 15 marks and internal examination for practical shall be evaluated for 10
marks conducted by the concerned laboratory teacher. The end examination
shall be conducted with external examiner and laboratory teacher. The
external examiner shall be appointed from the cluster of colleges as decided
by the University examination branch.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 22
Dept. of MECH
v. For the subject having design and / or drawing, (such as Engineering
Graphics, Engineering Drawing, Machine Drawing) and estimation, the
distribution shall be 25 marks for internal evaluation (15 marks for day-to-
day work and 10 marks for internal tests) and 75 marks for end
examination. There shall be two internal tests in a Semester and the better
of the two shall be considered for the award of marks for internal tests.
However in the I year class, there shall be three tests and the average of best
two will be taken into consideration.
vi. There shall be an industry-oriented mini-project, in collaboration with an
industry of their specialization, to be taken up during the vacation after III
year II semester examination. However, the mini project and its report shall
be evaluated with the project shall be submitted in report form and should
be presented before the committee, which shall be evaluated for 50 marks.
The committee consists of an external examiner, head of the department, the
supervisor of mini project and a senior faculty member of the department.
There shall be no internal marks for industry oriented mini project.
vii. There shall be a seminar presentation in IV year II semester. For the
seminar, the student shall collect the information on a specialized topic and
prepare a technical report, showing his understanding over the topic, and
submit to the department, which shall be evaluated by the Departmental
committee consisting of Head of the department, seminar supervisor and a
senior faculty member. The seminar report shall be evaluated for 50 marks.
There shall be no external examination for seminar.
viii. There shall be a comprehensive Viva-Voce in IV year II semester. The
Comprehensive Viva-Voce will be conducted by a Committee consisting of
(i) Head of the Department (ii) two Senior Faculty members of the
Department. The comprehensive Viva-Voce is aimed to assess the students’
understanding in various subjects he/she studied during the B.Tech course
of study. The comprehensive Viva-Voce is evaluated for 100 marks by the
Committee. There are no internal marks for the comprehensive viva-voce.
ix. Out of a total of 200 marks for the project work, 50 marks shall be for
Internal Evaluation and 150 marks for the End Semester Examination. The
End semester Examination (viva-voce) shall be conducted by the same
committee appointed for industry oriented mini project. In addition the
project supervisor shall also be included in the committee. The topics for
industry oriented mini project, seminar and project work shall be conducted
at the end of the IV year. The Internal Evaluation shall be on the basis of
two seminars given by each student on the topic of his project.
x. Laboratory marks and the sessional marks awarded by the college are not
final. They are subject to scrutiny and scaling by the University wherever
necessary. In such cases, the sessional and laboratory marks awarded by the
College will be referred to a Committee. The Committee will arrive at a
scaling factor and the marks will be scaled as per the scaling factor. The
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 23
Dept. of MECH
recommendations of the Committee are final and binding. The laboratory
records and internal test papers shall be preserved in the respective
institutions as per the University norms and shall be produced to the
Committees of the University as and when the same is asked for.
6.5 ATTENDANCE REQUIREMENTS:
i. A student shall be eligible to appear for University examinations if he acquires
a minimum of 75% of attendance in aggregate of all the subjects.
ii. Shortage of Attendance below 65% in aggregate shall in NO case be condoned.
iii. Condonation of shortage of attendance in aggregate up to 10% (65% and above
and below 75%) in each semester or I year may be granted by the College
Academic Committee.
iv. A student will not be promoted to the next semester unless he satisfies the
attendance requirement of the present semester / I year, as applicable. They may
seek re-admission for that semester / I year when offered next.
v. Students whose shortage of attendance is not condoned in any semester / I year
are not eligible to take their end examination of that class and their registration
shall stand cancelled.
vi. A stipulated fee shall be payable towards condonation of shortage of
attendance.
6.6 MINIMUM ACADEMIC REQUIREMENTS:
The following academic requirements have to be satisfied in addition to the
attendance requirements mentioned in item no.6
i. A student shall be deemed to have satisfied the minimum academic
requirements and earned the credits allotted to each theory or practical design
or drawing subject or project if he secures not less than 35% of marks in the
end examination and a minimum of 40% of marks in the sum total of the
internal evaluation and end examination taken together.
ii. A student shall be promoted from II to III year only if he fulfills the academic
requirement of 37 credits from one regular and one supplementary
examinations of I year, and one regular examination of II year I semester
irrespective of whether the candidate takes the examination or not.
iii. A student shall be promoted from third year to fourth year only if he fulfills
the academic requirements of total 62 credits from the following
examinations, whether the candidate takes the examinations or not.
a) Two regular and two supplementary examinations of I year.
b) Two regular and one supplementary examinations of I semester.
c) One regular and one supplementary examinations of II year II semester.
d) One regular examination of III year I Semester.
iv. A student shall register and put up minimum attendance in all 200 credits
and earn the 200 credits. Marks obtained in all 200 credits shall be considered
for the calculation of percentage of marks.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 24
Dept. of MECH
v. Students who fail to earn 200 credits as indicated in the course structure
within eight academic years from the year of their admission shall forfeit their
seat in B.Tech course and their admission shall stand cancelled.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 25
Dept. of MECH
7.0 COURSE CALENDAR FOR THE YEAR
Description Period Duration
I Sem
Commencement of Classwork 29-06-2015
1st Spell of Instructions 29-06-2015 22-08-2015 (8 weeks)
I mid term exams 24-08-2015 29-08-2015 (1 week)
2nd Spell of Instructions 31-08-2015 17-10-2015 (8 weeks)
II mid term exams 26-10-201 31-10-2015 (1 weeks)
Preparations & Practical
02-11-2015 07-11-2015 (1 weeks)
Examinations
End Examinations 09-11-2015 21-11-2015 (2 weeks)
II Sem
Commencement of Classwork 07-12-2015
1st Spell of Instructions 07-12-2015 30-01-2016 (8 weeks)
I mid term exams 01-02-2016 06-02-2016 (1 week)
2nd Spell of Instructions 22-02-2016 16-04-2016 (8 weeks)
II mid term exams 18-04-2016 23-04-2016 (1 weeks)
Preparations & Practical
25-04-2016 30-04-2016 (1 weeks)
Examinations
End Examinations 02-05-2016 14-05-2016 (2 weeks)
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 26
Dept. of MECH
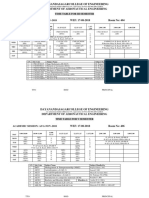
8. IV YEAR MECH COURSE STRUCTURE
CODE SUBJECT L P C
57022 Operations Research 4 1 4
57023 Power Plant Engineering 3 1 3
57024 CAD/ CAM 4 1 4
57025 Instrumentation & Control Systems 4 - 4
57026 Robotics 3 1 3
57030 Unconventional Machining Processes 3 1 3
57605 CAD/CAM Lab 0 3 2
57606 PDP/ICS Lab 0 3 2
Total 21 11 25
Note: All End Examinations (Theory and Practical) are of three hours
duration.
T – Tutorial L-Theory P- Practical C – Credits
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 27
Dept. of MECH
9.0 OPERATIONS RESEARCH (A70352)
9.1 COURSE DESCRIPTION:
Course Code A70352
Course Title OPERATIONS RESEARCH
Lectures Tutorials Practicals Credits
Course Structure
4 1 - 4
Course Coordinator Mr K ChinnaMaddaiah, Assistant Professor
Team of Instructors Ms. A. NaliniDeepthi
COURSE OVERVIEW:
Operation Research facilitates the comparison of every possible alternatives (courses of
action or acts) toknow the potential outcomes, permits examination of the sensitivity of
the solution to changes or errorsin numerical values, and encourage rational decision-
making based on the best available approaches ortechniques.
9.2 PREREQUISITES:
Level Credits Periods/Weeks Prerequisites
UG 4 4 LPP and Basic Mathematics
9.3 MARKS DISTRIBUTIONS:
University End Total
Session Marks (25M)
Exam Marks Marks
Continuous Assessment Tests (Midterm tests):
There shall be 2 midterm examinations. Each midterm
examination consists of one objective paper, one
subjective paper and four assignments. The objective
paper is for 10 marks and subjective paper is for 10
marks, with duration of 1 hour 20 minutes (20 minutes for
objective and 60 minutes for subjective paper).
Objective paper is set for 20 bits of – multiple choice
questions, fill-in the blanks, 10 marks. Subjective paper
contains of 4 full questions (one from each unit) of 75 100
which, the student has to answer 2 questions, each
question carrying 5 marks. First midterm examination
shall be conducted for 2.5 units of syllabus and second
midterm examination shall be conducted for another 2.5
units. 5 marks are allocated for Assignments. First two
assignments should be submitted before the
conduct of the first mid, and the second two assignments
should be submitted before the conduct of the second mid.
The total marks secured by the student in each midterm
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 28
Dept. of MECH
examination are evaluated for 25 marks, and the average
of the two midterm examinations shall be taken as the
final marks secured by each candidate.
9.4 EVALUATION SCHEME:
S. No Component Duration Marks
1 I Mid Examination 1 hour and 20 min 20
2 I Assignment 5
3 II Mid Examination 1 hour and 20 min 20
4 II Assignment 5
MID Examination marks to be considered as average of above 2 MID’s
5 External Examination 3 hours 75
Total 75
COURSE OBJECTIVES:
The objectives of the course are to enable the student;
I. Explain optimum utilization of resources, effort and implement the decision effectively.
II. Understand scientific systematic approach involved and provide a good intellectual
support fordecision making.
III. Discuss substantial experience in taking timely management decisions and for
corrective
measures.
IV. Analyzing the behavior of the system for the purpose of improving its performance.
V. Demonstrate reliability of solution obtained from a model depends on the validity of
the model inrepresenting the real systems.
VI. Generate solutions for the problems, what method should be adopted so that the total
cost isminimum or total profit maximum.
9.5 COURSE OUTCOMES:
After completing this course the student must demonstrate the knowledge and ability to:
1. Applying a different linear programming problem technique which has a broad
experience in finding the optimum profit.
2. Apply the knowledge of the course in solving real life problems.
3. Identify areas for research-oriented work based on the course content.
4. Calculate the knowledge that tries to optimize total return by maximizing the profit
and minimizing the cost or loss.
5. Recognize the best (optimum) decisions relative to largest possible portion of the total
organization.
6. Discuss towards the development of better working procedure and systematic
approach in problem analysis, modeling and implementation of solutions at the
workplace.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 29
Dept. of MECH
9.6 HOW PROGRAM OUTCOMES ARE ASSESSED:
Proficiency
Program Outcomes Level
assessed by
An ability to apply knowledge of computing, mathematical
Assignments
foundations, algorithmic principles, and computer science
Midterm and
a and engineering theory in the modeling and design of H
University
computer-based systems to real-world problems
examinations
(fundamental engineering analysis skills)
Assignments
An ability to design and conduct experiments, as well as to Midterm and
b H
analyze and interpret data (information retrieval skills) University
examinations
An ability to design , implement, and evaluate a computer-
Assignments
based system, process, component, or program to meet
Midterm and
c desired needs, within realistic constraints such as economic, S
University
environmental, social, political, health and safety,
examinations
manufacturability, and sustainability (Creative Skills)
An ability to function effectively on multi-disciplinary teams
d N --
(team work)
Assignments
An ability to analyze a problem, identify, formulate and use
Midterm and
e the appropriate computing and engineering requirements for H
University
obtaining its solution (engineering problem solving skills)
examinations
An understanding of professional, ethical, legal, security and
f social N --
issues and responsibilities (professional integrity)
An ability to communicate effectively both in writing and
g orally N --
(speaking / writing skills)
The broad education necessary to analyze the local and
global impact of computing and engineering solutions on
h N --
individuals, organizations, and society (engineering impact
assessment skills)
Recognition of the need for, and an ability to engage in Assignments
continuing Midterm and
i H
professional development and life-long learning (continuing University
education awareness) examinations
j A Knowledge of contemporary issues (social awareness) N --
An ability to use current techniques, skills, and tools
necessary for
k computing and engineering practice (practical engineering N --
analysis
skills)
Assignments
An ability to apply design and development principles in the
Midterm and
l construction of software and hardware systems of varying S
University
complexity (software hardware interface)
examinations
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 30
Dept. of MECH
An ability to recognize the importance of professional
development by pursuing postgraduate studies or face
m competitive examinations that offer challenging and N --
rewarding careers in computing (successful career and
immediate employment).
N=None S=Supportive H=Highly Related
9.1 SYLLABUS
UNIT -1
Development - Definition- Characteristics and Phases - Types of models - operation
Research models - Applications.
ALLOCATION: Linear Programming Problem Formulation - Graphical solution -
Simplex method -Artificial variables techniques -Two-phase method, Big-M method -
Duality Principle.
UNIT - II
TRANSPORTATION PROBLEM - Formulation - Optimal solution, unbalanced
transportation problem - Degeneracy. Assignment problem - Formulation - Optimal
solution - Variants of Assignment Problem-Traveling Salesman problem.
UNIT - III
SEQUENCING - Introduction - Flow -Shop sequencing - n jobs through two machines -n
jobs through three machines - Job shop sequencing - two jobs through 'm' machines.
REPLACEMENT : Introduction - Replacement of items that deteriorate with time -when
money value Is not counted and counted - Replacement of items that fail completely,
group replacement.
UNIT - IV
THEORY OF GAMES: Introduction - Minimax (maximin) - Criterion and optimal
strategy - Solution of Games with saddle points - Rectangular games without saddle
points -2X2 games -dominance principle -mX2&2Xn games -graphical method.
UNIT – V
WAITING LINES: Introduction - Single Channel - Poisson arrivals - exponential service
times – with Infinite population and finite population models- Multichannel - Poisson
arrivals -exponential service times With infinite population single channel Poisson
arrivals.
UNIT -VI
INVENTORY: Introduction - Single item - Deterministic models - Purchase
inventorymodels with one Price break and multiple price breaks - shortages are not
allowed - Stochastic models - demand may be discrete variable or continuous variable -
Instantaneous production. Instantaneous demand and continuous Demand and no set up
cost-Single period model.
UNIT -VII
DYNAMIC PROGRAMMING: Introduction - Bellman's Principle of optimality -
Applications of dynamic Programming- capital budgeting problem - shortest path
problem - linear programming problem.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 31
Dept. of MECH
UNIT –VIII
Simulation: Defination-Types of simulation models and phases of simulation
Application, advantages and dis-advantages of simulation Inventory and queuing
problems- Brief introduction of simulation languages
TEXT BOOK
1. Operations Research / S.D.Sharma-Kedarnath
2. Introduction to O.R/Hiller &Libermann (TMH).
REFERENCES
1. Operations Research /A.M.Natarajan, P.Balasubramani, A. Tamilarasi/Pearson
Education.
2. Operations Research: Methods & Problems / Maurice Saseini, ArhurYaspan&
Lawrence
Friedman
3. Operations Research / R.Pannerselvam,PHI Publications.
4. Operations Research / Wagner/ PHI Publications.
5. Operation Research /J.K.Sharma/MacMilan.
6. O.R/Wayne L.Winston/Thomson Brooks/cole
7. Introduction to O.R /Taha/PHI
9.8 COURSE PLAN:
The course plan is meant as a guideline. There may probably be changes.
Lecture Course Learning
No. Outcomes Topics to be covered Reference
1-2 Development – Definition–
Explain operation Characteristics and Phases – Types of T1, R3
Research models operation Research models
T1, R3
3-4 Outline applications and Allocation : Linear Programming -
formulations. Problem Formulation
5-6 Explain Simplex T1, R2
Graphical solution – Simplex method
method
7-8 Define Artificial T1, R1
Artificial variables techniques
variables
9-10 Derive Two–phase T1, R4
Two–phase method
method
T1, R2
10-11 Big-M method R3
Solve Big-M method
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 32
Dept. of MECH
T1, R1,
Describe and Derive
11-13 Duality Principle R3
Duality Principle
R1, R2
14-15 Describe unbalanced Formulation – Optimal solution -
transportation problem. unbalanced transportation problem
Analyze T1, R2,
15-16 . Assignment problem – Formulation – R3
Assignme
Optimal solution
nt problem
16-18 T1, R2
Identify Variants of AP Variants of Assignment Problem,
T1, R2
Sequencing: Introduction – Flow – Shop
19-21 Derive sequencing sequencing – n jobs through two
problems
machines – n jobs through three machines
T1, R2
22-23 Determine Job shop Job shop sequencing – two jobs through
sequencing ‘m’ machines.
24-25 T1, R2,
Describe replacement Replacement: Introduction
R3
T1, R3
26 Design Replacement of Replacement of items that deteriorate
items that deteriorate with time – when money value is not
with time counted and counted.
T1, R3,
Derive and Analyze
27 Replacement of items that fail R2
Replacement of items that
completely, group replacement.
fail completely
T1, R3
28- Theory Of Games: Introduction –
29 Discuss Minimax Minimax (maximin) – Criterion and
(maximin) Criterion optimal strategy
T1, R2,
30- R3
Discuss saddle points Solution of games with saddle points
31
T1, R2,
Construct Rectangular
32- R3
games without saddle Rectangular games without saddle points
33
points. –
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 33
Dept. of MECH
T1, R2,
Analyze dominance dominance principle – m X 2 & 2 X n R3
34- principle games -graphical method
36
T1, R4
37- Derive Single Channel – Waiting Lines: Introduction – Single
38 Poisson arrivals Channel – Poisson arrivals
T1, R2
Determine service times
39-
– with infinite population service times – with infinite population
41
and finite population and finite population models
models
T1, R4,
Determine and Discuss
42-44 Multichannel – Poisson R5
Multichannel – Poisson arrivals
arrivals
Derive Poisson arrivals T1, R4,
45-47 – exponential service Poisson arrivals – exponential service R5
times with infinite times with infinite population.
population.
T1, R4,
R5
48-49
Derive the formula for
single channel Poisson arrivals.
single channel Poisson
arrivals.
T1, R4
Inventory: Introduction – Single item –
Deterministic models – Purchase
Derive the formula for
inventory models with one price break
50-52 Inventory models
and multiple price breaks – shortages are
not allowed
T1, R4
53-55 Derive the formula for Stochastic models – demand may be
discrete variable or continuous variable
Stochastic models
– Instantaneous production
T1, R4
Determine Instantaneous
Instantaneous demand and continuous
demand and continuous
56-57 demand and no set up cost- Single
demand and no set up
period model
cost- Single period model
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 34
Dept. of MECH
T1, R4
Dynamic Programming: Introduction
58-61 Derive the formula for –Terminology- Bellman’s Principle of
Dynamic Programming optimality – Applications of dynamic
programming
T1, R4
62-64 Derive the formula for shortest path problem – linear
shortest path problem programming problem.
T1, R4
65-66 Discuss simulation Simulation: Definition – Types of
simulation models – phases of simulation–
models
applications of simulation
T1, R4
Derive the formula for
67-68 Inventory and Queuing problems
Inventory models
Discuss Simulation Advantages and Disadvantages – Brief T1, R4
69-70 Languages Introduction of Simulation Languages.
9.9 MAPPING COURSE OBJECTIVES LEADING TO THE ACHIEVEMENT OF
PROGRAM OUTCOMES:
Program
Outcomes
Course
Objectives
a b c d e f g h i j k l m
I H S H
II H
III H
IV H
V H
VI H
S= Supportive H=Highly Relative
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 35
Dept. of MECH
9.10 MAPPING COURSE OUTCOMES LEADING TO THE ACHIEVEMENT OF
PROGRAM OUTCOMES:
Program
Outcomes
Course
Outcomes
a b c d e f g h i j k l m
1 H H S
2 H H
3 H H
4 H S H
5 H
6 S S
S= Supportive H=Highly Relative
9.11 OBJECTIVE QUESTIONS:
UNIT-I
1. In simplex table, the value of Z j– Cj for basic variables will be [ C]
(A) Negative
(B) positive
(C) zero
(D) unity
2. If a dual has 3 variables in 2 constraints, its primal will have [C ]
(A) 3 variables and 2 constraints
(B) 3 conditions and two variables
(C) 2 variables and 3 constraints
(D) 2 conditions and 3 variables
3. The model parameters of linear programming model are [ C]
A) Objective Coefficient
B) Constraint coefficient
C) A&B
D)None
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 36
Dept. of MECH
4. When the value of decision variables in LPP is permitted to increase infinitely without
violating feasibility condition, then the solution is said to be [A ]
A) Unbounded
B)Bounded
C) No Solution
D) Multiple Solution
5. While solving LPP problem using simplex method, the identity matrix is always a
matrix [ B]
A) Rectangular
B) square
C) either A or B
D) neither A or B
6. In the two phase method, the solution of the ‘LPP’ is completed in _____phases. [C]
A) Four
B) three
C) two
D) one
7. While solving LPP in certain cases some basic variables may also have zero values.
This
situation is called__________. [C]
A) optimal
B) Multiple Solution
C) Degenaracy
D) None
8. An O R model represents a system, but does not physically resemble the components
of the
systemand after attaining solution; it is re-interpreted in terms of original system. This
OR
model can be named as [B]
(A)Iconic model
(B) Analogue model
(C) Symbolic model
(D) Normative model
9. Cj – Zj value for basic variable in a simplex tableau will be [B]
(A) any positive value
(B) zero
(C) negative value
(D) unit
10.A feasible solution to the linear programming problem should: [B]
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 37
Dept. of MECH
(A) satisfy the problem constraint
(B) optimize the objective function
(C) satisfy the problem constraint and non negativity restrictions
(D) satisfy non negativity restrictions only.
11. Which of the following is not a part of an LPP Problem? [D]
(A) Objective Function
(B) Constraint Set
(C) Condition Set
(D) End Corrections
12. A variable unrestricted in sign can assume the values as [D]
(A) Only positive
(B) Only negative
(C) Zero
(D) Any Value
13.The feasible region in the form of a ring is [B]
(A) Convex
(B) Concave
(C) Concavo- convex
(D) Convexo-concave
14. The number of basic feasible solutions in a feasible region will be [A]
(E) Finite
(F) Infinite
(G) Zero
(H) We can not say
15. The number of optimal solutions of LPP for maximizing objective function on
unbounded
feasible region is [D]
(A) Infeasible
(B) Unique
(C) Multiple
(D) Infinite
16. If there is a tie for key column selection then preference is given to _____variable
[A]
(A)Slack
(B) Surplus
(C) Artificial
(D) Arbitrary
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 38
Dept. of MECH
17.The minimum ratio is neglected if [D]
(A) Zero
(B) Negative
(C) Infinity
(D) Infinity or negative
18. Penalties are used in [B]
(A) Two phase method
(B) Big M Method
(C) Dual Simplex
(D) All of the above
19.To improve the simplex tableau, we try to make [B]
(A) Basic variable equal to unity
(B) Key element equal to unity
(C) Solution value equal to zero
(D) Non-basic variable equal to zero
20. If a dual has three variables in two constraints, its primal will have [C]
(A) Three variables and two constraints
(B) Three conditions and two variables
(C)Two variables and three constraints
(D)Two conditions and three variables
UNIT-II
1. There will be no solution in [ B] (SEP-2011 JNTU)
(A) Unbounded solutions
(B) Infeasible solutions
(C) multiple solutions
(D) unique solutions
2. In a T.P. Matrix of the order 6 X 5, the degeneracy is found if number of allocated
cells are
[C] (SEP-2011 JNTU)
(A) 11
(B) 10
(C) 9
(D) 8
3. An assignment problem is said to be balanced if [ A] (SEP-2011 JNTU)
(A) no. of rows =no. of columns
(B) no. of allocated cells=no. of rows + no. of columns - 1
(C) Total supply=total demand
(D) no. of zero in the cost matrix is equal to the order
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 39
Dept. of MECH
4. Penalties are used in [B ] (SEP-2011 JNTU)
(A) Two phase method
(B) Big – M method
(C) dual simplex
(D) all the above
5. A loop in transportation optimization should have _____________ at the corners. [D ]
(A) All allocated cells
(B) all unoccupied cells
(C) at least one occupied cell
(D)only one unoccupied and all other occupied cells
6. The transportation model is treated as balanced if [A ]
A) Demand= Supply
B) Demand >Supply
C)Demand< Supply
D)NONE
7. In corner point solution method the value of objective function is completed at which
points offeasible solutions space [B ]
A) Middle Point
B) Corner Point
C)None
D) A&B
8. In transportation problems optimality test can be carried out by [C ]
A) Stepping Stone Method
B) MODI Method
C)A&B
D)Row Minima Method.
9. Hungarian Method Deals With [A ]
A) Assignment model
B)Transportation model
C)Graphical model
D)None
10. If the distance (or time or Cost) Between Every pair of cities is independent of
travelling
direction the problems is said to be [ B]
A) Asymmetrical
B) Symmetrical
C) A&B
D)None
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 40
Dept. of MECH
11. The cost of assignment in dummy cell is [ B]
A) Unity
B) Zero
C) Infinity
D) Negative
12 .In an optimal solution of AP of 4x4 matrix the minimum number of lines we must get
at least is [ A]
A. 3
B. 8
C. 4
D. 7
13. A matrix of travelling salesman problem contains [ C]
A. No figures along at least one row
B. No figures along at least one column
C. No figures along the diagonals
D. No figures along the principle diagonals
14. In AP, we get multiple optimal solutions if [ A]
A. A loop can be constructed with zeros having assignment at alternate corners
B. Minimum no of lines is greater than the order
C. Minimum no of lines is equal to the order
D. Minimum no of lines is less than the order
15. An opportunity cost matrix of AP should have [A]
A. At least one zero in each row
B. At least one zero in each column
C. A & B
D. No zeros in at least one column or row
16. Which of the following is always a balanced problem? [C]
A. Transportation
B. Assignment
C. Travelling salesman
D. None of the above
17. If the number of minimum lines is less the order of matrix then it means [B]
A. Optimization is already achieved
B. One more line is to be drawn
C. Allocation is wrong
D. There is a scope for further optimization
18. Which of the following is not be marked while revising the AP? [ A]
A. Row which has no assignment
B. Column which has no assignment
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 41
Dept. of MECH
C. Row in which marked column has an assigned zero
D. Column in which marked row has an assigned zero
19. While revising the opportunity cost table of AP, least among unlined number is taken
to [ D]
A. Add at unlined numbers
B. Subtract at double lined numbers
C. Add at single lined numbers
D. Subtract at unlined numbers
20. If the number of rows exceeds the number of columns by 2, then we add [ D]
A. Dummy row
B. 2 Dummy rows
C. Dummy column
D. 2 Dummy columns
UNIT-III
1. The following rule is used in sequencing [B]
(A) Hungarian
(B) Johnson’s
(C) Monte-Carlo
(D) VAM
2. When the money value is changing with time @20%,the discount factor for 2nd year [B ]
(A) 1
(B) 0.833
(C) 0.909
(D) zero
3. In sequencing an optimal path is one that minimizes [ B]
A) Elapsed time
B) Idle time
C) Processing Time
D)None.
4. The number of possible sequences (theoretical) which minimize the total elapsed time for ‘3’
jobs to be performed one at a time on each of ‘3’ machines is [ D]
A) 6
B) 9
C) 8
D) 216
5. The time interval between starting the first job and completing the last job including the idle
time in a particular order by the given set of machines is called [B]
A) Idle Time
B) Total elapsed time
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 42
Dept. of MECH
C) Machining Time
D) NO Solution
6. If two jobs J1 and J2 have same process times in both series we prefer [D]
(a) J1
(b) J2
(c) J1 and J2
(d) J1 or J2
7. The replacement policy that is imposed on an item irrespective of its failure (i.e. it is replaced
even though it has not failed) is [ B]
(a) Individual replacement
(b) Group replacement
(c) If money value is constant
(d) If money value varies with time
st
8. Jobs A to E have process times as 12,4,20,14 and 22 on 1 Machine and 6,14, 16, 18 and 10 on
nd
2 Machine, the optimal sequence is [D ]
(a) CEABD
(b) AECDB
(c) BCDEA
(d) BDCEA
9. In replacement analysis the maintenance cost is the function of [B ]
(a) Present value
(b) Time
(c) Maintenance policy
(d) Resale value
10.The sequencing rule usually followed at a petrol bank when ‘n’ vehicles are waiting, is
[A]
(A)FIFO
(B) LIFO
(C) Lowest process time
(D) Highest profit rule
11.Multiple optimal solutions are obtained if two jobs have same process times in [C]
(A) First machine series
(B) Second machine series
(C) Both series
(D) Any one series
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 43
Dept. of MECH
12.In a maximization case of sequencing two machines x n jobs the job is placed at
available left first position if it has _______process time in _________machine series.
[B]
(A)Least, first
(B) Highest, first
(C) Least, Second
(D) Highest, second
13. If a job has zero process time for any machine the job must [C]
(A) Posses first position only
(B) Posses last position only
(C) Posses extreme position
(D) Be deleted from the sequencing
14. No passing rule means [B]
(A) A job once loaded on a machine should not be removed until it is completed.
(B) A job can not be processes on second machine unless it is processes on first
machine.
(C) A machine should not be started unless the other is ready to start.
(D) No job should be processes unless all other are kept ready to start.
15. According to Johnson’s rule, the smallest processing time if occurs in [A]
(A) First series, place it in the first available position
(B) Second series, place it in first available position
(C) First series, Place it middle
(D) Second series, place it middle
16. If two jobs J1 & J2 have same process times in both series we prefer [D]
(A) J1
(B) J2
(C) J1 & J2
(D) J1 or J2
17. The time required for printing of four project reports P,Q,R and S is 4,7,9 and 6 hrs
while its data entry requires 6,3,2 and 5 hrs respectively. The sequence that minimizes the
total elapse is _____ [D]
(A) PSQR
(B) PQRS
(C) PSRQ
(D) RQSP
18. In which of the following we get multiple optimal solutions [D]
(A) Same least time for two jobs in both series of machines of 2*n jobs sequence model.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 44
Dept. of MECH
(B) If we can convert the zeros as the corners of a rectangular loop, allocated cells
alternatively in AP or TP.
(C) If objective function has same slope to that of one of non-redundant constraint of an
LPP.
(D) All the above
19. In a 2*n machine sequencing, a line at 45 degrees represents [D]
(A) Job 1 is idle (B) Job 2 is idle (C) Both jobs are idle (D) No job is idle
20. If the number of minimum lines is less the order of matrix then it means [B]
A. Optimization is already achieved
B. One more line is to be drawn
C. Allocation is wrong
D. There is a scope for further optimization
UNIT-IV
1. If the gain of a player is loss of another player then the game is called [A]
(A) Fair game
(B) unfair game
(C) zero sum game
(D) non zero sum game
2. A plan of action which is changed while the game is in progress is called [B ]
A) Pure strategy
B) Mixed Strategy
C) operational Strategy
D) None
3. A game is said to Zero sum game when sum of players gain and loss are equal to [ A]
A) 0
B) 1
C) α
D)< 0
4. A game is set to be fair game when the value of game [B ]
A)1
B) 0
C) >1
D)None
5. If saddle point does not exist, [ B]
(a) It is deterministic game
(b) Mixed strategies are used
(c) Maximin - minimax criteria are used
(d) It is a fair game
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 45
Dept. of MECH
6 A System in which state variables change only at points in time is known as [B ]
A) Discrete
B) Continuous
C) Exponential
D) None
7 If the gain of a player is loss of another player then the game is called [A]
(A) Fair game
(B) unfair game
(C) zero sum game
(D) non zero sum game
8 A plan of action which is changed while the game is in progress is called [B ]
A) Pure strategy
B) Mixed Strategy
C) operational Strategy
D) None
9.A game is said to Zero sum game when sum of players gain and loss are equal to [ A]
A) 0
B) 1
C) α
D)< 0
10.A game is set to be fair game when the value of game [B ]
A)1
B) 0
C) >1
D)None
14.If saddle point does not exist, [ B]
(a) It is deterministic game
(b) Mixed strategies are used
c) Maximin - minimax criteria are used
(d) It is a fair game
15. If the value of the game is zero, then that game is known as [C]
(a) Pure strategy
(b) Mixed strategy
(c) Fair Game
(d) Pure Game
16. When maximin and minimax match then, [A]
(a) Saddle point exist
(b) Fair game is resulted
(c) Mixed strategies are adopted
(d) Game will be unfair
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 46
Dept. of MECH
17. Games with saddle points are _________in nature [A]
(a) Deterministic
(b) Probabilistic
(c) Stochastic
(d) Normative
18. The final decision is first solved in _________recursion [B]
(a) Forward
(b) Backward
(c) Upward
(d) Downward
19. The sub problem of a main problem in a DPP is said to be [D]
(a) State
(b) Function
(c) Recursion
(d) Stage
20. An LPP solved by using DPP method assumes the variables as_____ [B]
(a) States
(b) Stages
(c) Recursions
(d) Return Functions
UNIT-V
1. A customer who is already in queue will leave the queue in anticipating of larger waiting time [
B]
a) Jockeying
b) Reneging
c) Boarding
d) Balking
2. A Doctor rushing to an emergency case, leaving his regular service is said to be [ A]
a) Pre-emptive Queue discipline
b) Non Pre-emptive Queue discipline
c) Reneging
d) Balking
3. A Poisson arrival, exponential service by single server to limited queue selected
randomly is represented by [C ]
a) (M/M/C) : (GD/∞/∞)
b) (M/M/1) : (GD/∞/∞)
c) (M/M/1) : (GD/N/N)
d) (M/M/C) : (GD/N/N)
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 47
Dept. of MECH
4. Waiting line problems arise either because [C ]
A) Too much demand
B) Too less demand
C) A & B,
D) None
5. A Queuing model is called multiserver model if the system has number of parallel
channels each with one server [C ]
A) 1
B) 0
C) > 1
D) None
6. Stock level at which fresh order should be placed is known as [C ]
A) Out of Stock
B) Surplus
C) Re Order Level
D) None
7. A steady state can exist in a queue if [ C]
(A) λ>μ
(B) λ<μ
(C) λ≤ μ
(D) λ≥ μ
8. The cost of providing service in a queuing system decreases with [ D]
(A) decreased average waiting time in the queue
(B) decreased arrival rate
(C) Increased arrival rate
(D) none of the above
9. The unit of traffic intensity is [C]
(A) Poisson
(B) Markov
(C) Erlang
(D) Kendall
10. Which of the following has 100% efficiency [ A]
(A) Arrival rate=service rate
(B) arrival rate> service rate
(C) Arrival rate<service rate
(D) none
11. A customer buying tickets in black market at a cinema hall is said to be [ C ]
(a)balker
(b) renege
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 48
Dept. of MECH
(c) jockeyer
(d) dissatisfied
12. an expediting in production shop in example for queue discipline [ D ‘]
(a) FIFO
(b) LIFO
(c) SIRO
(d) pre-emptive
13. the dead bodies coming to a grave yard is an example of [ B ]
(a)pure death process
(b) pure birth process
(c) birth and death process
(d) not a queue process
14. in (M/M/S) : (N/FIFO), which of the following is wrongly stated [ C ]
(a) poisson arrival
(b) exponential service
(c) single service
(d) limited service
15. which of the following is not considered as the negative behavior of costomer
according to queue discipline [ D ]
(a) renegative
(b) jockeying
(c) balking
(d) boarding
16. the system of loading and unloading of goods usually follow [ B ]
(a) FIFO
(b) LIFO
(c) SIRO
(d) pre-emptive
17. if the operating characteristics of a queue are dependent on time then it is said to be [
B ]
(a) steady state
(b) transient state
(c) busy period
(d) explosive state
18. a person who goes out of queue by losing patience to wait it said to be [ A ]
(a) renegative
(b) jockeying
(c) balking
(d) boarding
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 49
Dept. of MECH
19. an office filing system follows [ B ]
(a) FIFO
(b) LIFO
(c) SIRO
(d) non-pre-emptive
20. SIRO discipline is found generally in [ C ]
(a) office filing
(b) trains arriving to platform
(c) lottery
(d) loading and unloading
UNIT-VI
1. The formula for EOQ when shortage is allowed and constant demand and
instantaneous replenishment is given by [B ]
a) 02CCDC
b) 02CDCCC
c) 02CDCCC
d) 02CDCCC
2. The most suitable analysis for spare parts in engines and machinery, are vital [C ]
a) A B C Analysis
b) F S N Analysis
c) V E D Analysis
d) None
3. The inventory system design for petrol tank of a two wheeler is [B]
a) P-System
b) Q-System
c) Stochastic System
d) Poisson Model
4. The material stored to safe guard, the production chain in the event of machine
breakdown[B ]
a) Buffer stock
b) De-coupling Inventory
c) Lost wise Inventory
d) None
5. ABC Analysis is known as [D ]
A) Always Better Control
B) Control by Importance and exception
C) Proportional Value
D) All
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 50
Dept. of MECH
6. What are commonly used periodic review system [ C]
A) Fixed order system
B) SS System
C) Fixed order & SS System
D) Q & Two bin System
7. Taxes and insurance included in [D ]
(A) Ordering cost
(B) shortage cost
(C) purchase cost
(D) carrying cost
8. If shortage cost is infinity [B ]
(A) Order cost is zero
(B) no shortages are allowed
(C) No inventory carrying is allowed
(D) purchase cost=carrying cost
9. In the case of inventory model with shortages, the optimal amount of back order units [ b]
(a) EOQ/2
(b) 10% of EOQ
(c) EOQ. sccCCC+
(d) EOQ. scsCCC+
10. If the total investment in stock is limited, the best order quantity for each item is [a ]
(a) equal to EOQ
(b) greater than EOQ
(c) less than EOQ
(d) either greater or less than EOQ
11. Taxes and insurance are included in [C]
(a) Ordering cost
(b) Shortage costs
(c) Purchase cost
(d) Carrying costs
12.Dealer sells a TV set at Rs. 9000 and makes 80% profit on his investment. If he can
sell it at Rs. 2000 more, his profit as percentage of investment will be [C ]
(a) 100%
(b) 120%
(c) 160%
(d) 180%
13. In inventory control, the economic order quantity is the [ C]
(a) Optimum lot size
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 51
Dept. of MECH
(b) highest level of inventory
(c) lot corresponding to break even point
(d) none of the above
14. In perpetual inventory control, the material is checked as It reaches its [D]
(a) Minimum value
(b) maximum value
(c) average value
(d) middle value
15.Buffer stock is [A]
(a) Average demand + average lead time
(b) average demand*average lead-time
(c) average demand- average lead-time
(d) average demand / average lead time
16. The purchase cost is assumed to be varying with quantity ordered in the inventory
model with [C]
(a) Shortages
(b) Finite production rate
(c) Price breaks
(d) none
17. Stochastic model means [B]
(a) Deterministic model
(b) Probabilistic model
(c) Fixed period models
(d) fixed model
18. Find the odd man out [D]
(a) PWF
(b) DR
(c) DV
(d) Mortality tables
19. The maintenance cost are assumed to be mostly dependent on [B]
(a) Calender Age
(b) Running Age
(c) User’s age
(d) Manufacturere’s age
20. In replacement analysis the maintenance cost is the function of [B]
(a) Present Value
(b) Time
(c) Maintenance Policy
(d) Resale value
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 52
Dept. of MECH
UNIT-VII
1. The principle of optimality is given by [C ]
a) Kimball
b) Dantzig
c) Richard Bellman
d) None
2. An LPP solved by using DPP method assuming the variables as [C]
a) Recursion
b) Return Function
c) Stages
d) None
3. A System in which state variables change only at points in time is known as [A ]
A) Discrete
B) Continuous
C) Exponential
D) None
4. A probabilistic dynamic programming (PDP) decision makers goal is to ___the
expected reward over a given time horizon [ A]
A) Maximize
B) Minimize
C) A & B,
D) None
5. A periodic review model in which each products demand is known at beginning of the
problem is [ A]
A) Dynamic Lot Size
B) Static Lot Size
C) A&B
D) None
6. An LPP solved by using DPP method assumes the variables as [ B]
(A) States
(B) stages
(C) recursions
(D) return functions
7. The optimality principle (to solve DPP) is given by [C ]
(A) Dantzig
(B) Richard Brown
(C) Bellman
(D)Kimball
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 53
Dept. of MECH
8. How many objective functions will a DPP have? [D ]
(a) no objective function
(b) equal to that of no. of stages
(c) only one objective functions
(d) infinite objective functions
9. The mathematical technique of optimizing such a sequence of inter related decisions
over a period of time is called -------------programming [B ]
(a) Linear
(b) non linear
c) Dynamic
d) stochastic
10. in dynamic programining which of the following does not change at every stage [B]
(a) objective function
(b) recursive function
(c) results
(d) state variables
11. the sub problems of main problem in a DPP is said to be [D]
(a) state
(b) function
( c) recursions
(d) stage
12. which of the following is considered as recusive optimization [ B ]
(a) LPP
(b) DPP
(C) AS
(d) TP
13. return function of DPP depends on [ d ]
(a) state variable
(b) stage decision
(c) decision policy
(d) all the above
14. the equation that converts all the stages of the DPP is known as [ C ]
(a) state function
(b) stage function
(c) transition function
(d) return function
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 54
Dept. of MECH
15. thefina stage decision is first solved in recursion [ B ]
(a) forward
(b) backward
(c) upward
(d) downward
16. A DPP will have [ C ]
(a) no objective function
(b) only one objective function
(c) objective function equal to that of stage
(d) infinite objective function
17. find odd man out with reference to dynamic programming [ B ]
(a) objective function
(b) bijective function
(c) recursive function
(d) transportation function
18. characteristics LPP and DPP approaches differ in [ D ]
(a) productionschedulding problem
(b) inventory problem
(c) variables
(d) behavioural problem
19. according to optimality principle if an optimal solution is obtained to a system of it
must be optimal [ C ]
(a) some portion
(b) final stage
(c) any portion
(d) atkeast one portion
20. when input and out are given as fixed which recursion works well [ C ]
(a) forward
(b) backward
(c) bothrecusion are equally dood
(d) no recursion can work well
UNIT-VIII
1. Observance of the behavior of the real system under as many operations and
configurations as possible to get an insight is a called [B]
a) Computer simulation
b) identity simulation
c) Laboratory simulation
d) none
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 55
Dept. of MECH
2. Simulation model which represent a system at particular point in time is known as [A]
A) Static
B) Dynamic
C) A&B
D) None
3. A markovDecission process is described by how many types of Information [D ]
A) 1
B) 2
C) 3
D) 4
4. Which of the following has 100% efficiency [ A]
(A) Arrival rate=service rate
(B) arrival rate> service rate
(C) Arrival rate<service rate
(D) none
5. Simulation where changes in the state of the system occur instantaneously at random
points in a given time, is called [C ]
(a) Continuous simulation
(b) Discrete event simulation
(c) Deterministic simulation
(d) Random number
6. In the word "Monte Carlo Simulation", Monte Carlo is the name of [ D ]
(a) Scientist
(b) Car
(c) Place
(d) Mountain
7. SIMULA resembles with [A ]
(a) ALGOR
(b)FORTRAN
(c) BASIC
(d) COBOL
8. fortran was the intermediate language in the initial days for (b)
(a) GPSS
(b) SIMSCRIPT
(c) SIMULA
(D) GPRS
9. non-uniform random numbers can be generated by (c)
(a) mid-square method
(b) multiplicative congruence
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 56
Dept. of MECH
(c) inverse transformation
(d) set of dice
10. which of the following is not conducted with testing of random ness of random
numbers and validation of simulation model [ d ]
(a) chi-square test
(b) kolmogorov-smirnov test
(c) cramer-von mises test
(d) litmus test
11. which of the following is not condected with testing of rtandom ness of random
numbers [ d ]
(a) uniformity
(b) good ness of fit in a distribution
(c) independence
(d) calibration
12. which of the following is not a simulation soft ware [ d ]
(a) GPSS
(b) SIMSCRIPT
(c) SIMULA
(D) GPRS
13. face validity is concerned with [ a ]
(a) logical queries
(b) validating by sub system
(c) input-outpot analysis
(d) internal assessment
14. types of simulation based on certainty are [ b ]
(a) static and dynamic simulation
(b) deterministics and stochastic simulation
(c) analogue and computer simulation
(d) discrete-event and continuous simulation
15. the code name monte-carlo simulation is given by [ b ]
(a) monte-corlo
(b) van-neumann&s.m.ulma
(c) geoffery Gordon
(d) karlpearson
16. key element is also called (B)
a) Networking
b) pivot element
c) Game theory
d) transportation
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 57
Dept. of MECH
17.-----------------Signifies research on operation (D)
(a) queuing theory
(b) value analysis
(c) network analysis
(d)operation research
18. The number of basic feasible solutions in a feasible region will be [A]
A).Finite
(B) Infinite
(C) Zero
(D) We can not say
19.A solution that satisfies the consists of a LPP is called-----------(A )
(a) feasible solution
(b) five
(c) six
(d) seven
20. A variable unrestricted in sign can assume the values as [D]
A)Only positive
(B) Only negative
(C) Zero
(D) Any Value
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 58
Dept. of MECH
9. 12 TUTORIAL QUESTIONS:
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-I
Tutorials
Short Answer Questions
What is duality? What is the significance of dual variable in a LP
1 Knowledge a
model?
2 What is an unbounded solution? Explain. Knowledge b
3 Explain the effect of cutting fluids on chip contraction. Analysis e
4 Define the term Feasible solution comprehension c
5 Define the term Basic solution comprehension a
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-I
Tutorials
Long Answer Questions
1)Use big –M method to solve the following
Maximize Z = 6x1 + 4x2
Subjected to 2x1+3 x2 ≤ 30
1 Knowledge a
3x1+2x2 ≤ 24
x1 +x2 ≥ 3
x1, x2 ≥ 0..
Applying the concept of duality, solve the LPP
Maximize Z = 3x1 + x2
Subjected to x1- x2 ≤ 1
2 Knowledge a
x1+x2 ≤ 4
x1 - 3x2 ≤ 3
x1, x2 ≥ 0
Use the graphical method to solve the following LP
Problem
Maximize Z = 3x1 +4x2
3 Analysis a
subject to the constraints
x1 - x2 = -1
x1 + x2 ≤_ 30 x1; x2 _≥ 0.
Solve the following LP Problem by two phase method
Maximize Z = 5x1 - 2x2 + 3x3
subject to the constraints
4 2x1 + 2x2 - x3 ≥ 2 comprehension b
3x1 - 4x2 ≤ 3
x2 +3x3 ≤ 5
x1, x2 , x3 ≥ 0
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 59
Dept. of MECH
Solve the following LP Problem by two phase
methodMinimize Z = x1 - 2x2 -3x3
subject to the constraints
5 comprehension a
-2x1 + x2 +3x3 = 2
2x1 + 3x2 + 4x3 =1
x1, x2 , x3 _ 0.
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-II
Tutorials
Short Answer Questions
State the mathematical formulation of the transportation
1 Analysis b
problem and the simplex problem.
2 Explain Vogel’s approximation method. comprehension a
How will you solve an Assignment problem, where a
3 comprehension b
particular assignmentprohibited?
4 Explain degeneracy in T.P. Analysis e
What are the differences in the nature of problems that can
5 Knowledge b
be solved by these methods
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-II
Tutorials
Long Answer Questions
Find the optimal solution for a given TP.
1 2 3 4
A 6 7 3 7 5
1 B 7 9 1 5 7 Analysis b
C 6 5 16 7 8
D 18 9 10 2 10
10 5 10 5
Find the optimum assignment for the given problem.
a b c d E
A 160 130 175 190 200
2 B 135 120 130 160 175 comprehension a
C 140 110 155 170 185
D 50 50 80 80 110
E 55 35 70 80 105
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 60
Dept. of MECH
Find the minimum cost assignment for the following
problem.
I II III IV V
A 6 5 8 11 16
3 comprehension b
B 1 13 16 1 10
C 16 11 8 8 8
D 9 14 12 10 16
E 10 13 11 8 16
Find the optimal solution for a given TP.
1 2 3 4
A 6 7 3 7 5
4 B 7 9 1 5 7 Analysis e
C 6 5 16 7 8
D 18 9 10 2 10
10 5 10 5
Find the optimum assignment for the given problem.
a b c d e
A 160 130 175 190 200
5 B 135 120 130 160 175 Knowledge b
C 140 110 155 170 185
D 50 50 80 80 110
E 55 35 70 80 105
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-III
Short Answer Questions
1 Define Time value of money. Knowledge b
An engineering company is offered a material handling
equipment A.A is priced at Rs.120000/- including cost
of installation and the costs for operation and
maintenance are estimated to be Rs.20000/- for each of
2 Knowledge e
the first 5 years ,increasing every year by Rs.6000/- per
year in the sixth and subsequent years .The company
expects a return of 10% on all its investments.What is
the optimal replacement period.
3 What is descount rate? How is it computed? Analysis b
A truck owner _nds from his past records that the
maintenance costs per year
of a truck whose purchase price is Rs. 8,000 are as give
4 comprehension a
below:
Year : 1 2 3 4 5 6 7 8
Maintenance cost (Rs) 1,000 1,300 1,700 2,000 2,900
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 61
Dept. of MECH
3,800 4,800 6,000
Resale price (Rs) 4,000 2,000 1,200 600 500 400 400
400
Determine at which time it is profitable to replace the
truck..
Explain the replacement strategy for items of low cost
5 comprehension b
which fail suddenly.
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-III
Long Answer Questions
The following failure rates have been observed for a
certain type of light bulb.
End of Week : 1 2 3 4 5 6 7 8
Probability of failure : 0.05 0.13 0.25 0.43 0.68 0.88
0.96 1.00
1 The cost of replacing an individual bulb is Rs. 2.25. The Knowledge b
decision is made to replace all bulbs simultaneously at
fixed intervals, and also to replace individual bulbs as
they fail in service. If the cost of group replacement is
60 paise per bulb and the total number of bulbs is 1,000,
what is the best interval between group replacements?
A newspaper boy buys papers for 3 paise and sells them
for 7 paise each. He can not return unsold newspapers.
Daily demand has the following distribution. No.of
2 Customers 23 24 25 26 27 28 29 30 31 32 Probability Knowledge e
0.01 0.03 0.06 0.10 0.20 0.25 0.15 0.10 0.05 0.05 If each
day's demand is independent of the previous day's, how
many papers should he order each day?
Discuss in brief the replacement policy for the items that
4 comprehension a
deteriorate with time.
A plant manager is considering replacement policy for a
new machine. He estimates the following costs (all costs
in rupees). Year : 1 2 3 4 5 6 Replacement cost at the
5 beginning of year 100 110 125 140 160 190 Resale Knowledge b
value at the end of year: 60 50 40 25 10 0 Operating
costs: 25 30 40 50 65 80 Find an optimal replacement
policy and corresponding minimum cost.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 62
Dept. of MECH
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-IV
Short Answer Questions
Explain the application of sequencing model. Mention
1 Analysis b
different types of sequencing problem you come across
Explain the methodology of Johnson and Bellman
2 comprehension e
method to solve sequencing problem
3 Explain group replacement concept and its applications. comprehension b
4 Write short note on sequencing. Analysis a
What are the conditions to be satisfied to convert a ‘n’
5 jobs 3 machine problem into ‘n’ jobs 2 machine Knowledge b
problem?
Blooms Cour
Sl. Taxonom se
Questions
No. y Outco
Level me
UNIT-IV
Long Answer Questions
Find the following sequencing problem to minimize the time
elapsed with sequence M1&M2
Job 1 2 3 4 5
1 Machine M1 7 10 8 9 7 Analysis b
Machine M2 2 1 4 0 5
Also find the total elapsed time and idle times of each machine.
decision has to be made for group replacement versus individual
replacement policy for 500 fluorescent tubes of a particular
make in the university campus. Failure rate for the tubes were
recorded as under
End of Month 1 2 3 4 5 6
Probability of comprehe
2 failures e
nsion
0.11 0.3 0.25 0.2 0.1 0.04
Cost of replacing an individual tube is Rs. 55/- and when
replaced as group it is Rs.35/-
Find out whether group replacement policy is economical or not.
If economical at the end of which month should the tubes be
replaced as a group?
factory has a large number of bulbs all of which must be in
comprehe
3 working condition. The mortality of b
nsion
bulbs is given in the following table.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 63
Dept. of MECH
Proportion of bulbs failing during the
Week week
1 0.1
2 0.15
3 0.25
4 0.35
5 0.12
6 0.03
If a bulb fails in service, it costs 3.50 to replace, but if all bulbs
are replaced at a time it costs Rs. 1.20 each. Find the
optimum group replacement policy [Assume 1000 bulbs as
available in the beginning].
Determine the best sequence for ‘5’ jobs that will minimize the
elapsed time T, if each of the ‘5’ jobs must go through machines
A, B and C in the order ABC, The processing times are.
Job Processing time
A B C
4 Analysis a
1 8 5 4
2 10 6 9
3 6 2 8
4 7 3 6
5 11 4 5
Can you apply sequencing in day to day examples? Knowledg
5 b
e
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-V
Tutorials
Short Answer Questions
1 Give a brief description of the various types of queues? Knowledge b
Patients arrive at a clinic according to a Poission
distribution at the rate of 30 patients per hour. The
waiting room does not accommodate more than 14
2 Knowledge e
patients. Examination time per patient is exponential
with mean rate 20 per hour? Find the effective arrival
rate at the clinic?
3 Explain the constituents of a single channel? Analysis b
A firm is engaged in both shipping and receiving
activities. The management is always interested in
4 comprehension b
improving the efficiency by new innovations in loading
and unloading procedures. The arrival distribution of
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 64
Dept. of MECH
trucks is found to be poission with arrival rate of two
trucks per hour. The service time distribution is
exponential with unloading rate of three trucks per hour.
Find the Average number of trucks in the waiting line.
What is Queue? Give an example and explain the basic
5 comprehension e
elements of queues?
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-V
Tutorials
Long Answer Questions
If for a period of 2 hours in a day (8-10 AM) planes
arrive at the aerodrome for every 20 minutes but the
1 service time continuous to remain 32 minutes, then Knowledge b
calculate for this period. The probability that the
aerodrome is empty
State some of the important distributions of arrival
2 Knowledge e
intervals and service time
In a car garage A, it takes 15 minutes to wash one car.
Cars arrive to the garage at an average rate of one every
25 minutes and arrival process is poisson. In car garage
3 B, it takes 25 minutes to wash one car and cars arrive to Analysis b
this shop at an average rate of one every 45 minutes, the
arrival process being poission during steady state.
Determine At which garage you expect the bigger queue
4 explane the chararacteristics of a queuing system. comprehension a
explane Kendall’s notation for representing queuing
5 comprehension b
models.
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VI
Tutorials
Short Answer Questions
A stockist has to supply 400 units of a product every
Monday to his customers. He gets the product at Rs.50
per unit from the manufacturer. The cost of ordering and
1 Knowledge b
transportation from the manufacturer is Rs.75 per order.
The cost of carrying inventory is 7.5% per year of the
cost of the product.Find. (a) The economic lot size. (b)
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 65
Dept. of MECH
The total optimal cost (including the capital cost)
2 Discuss about significance of inventory. Knowledge e
A stockist purchases an item at the rate of Rs. 40 per
piece from a manufacturer. 2,000 units of the item are
3 required per year. What should be the order quantity per Analysis b
order if the cost per order is Rs.15 and the inventory
charges per year are 20 per cent?
Calculate the E.O.Q in unit and total variable cost of the
following items, assuming on ordering cost of Rs.5 and a
4 holding cost of 10%. Item Annual demand Unit price A comprehension b
800 units Rs.0.02; B 400 units 1.00; C 392 units 8.00; D
13,800 units 0.20
Solve the following LPP by dynamic programming:
5 Maximize Z = 50x1+ 100x2, Subject to 2x1 +3x2 ≤ 48, comprehension e
x1 + 3x2 ≤ 42, x1 + x2 ≤ 21, x1 , x2 ≥ 0.
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VI
Tutorials
Long Answer Questions
For the above problem, compute E.O.Q. in Rs. as well as
in years of supply. The annual demand of a product is
10,000 units. Each unit costs Rs.100 if orders are placed
1 in quantities below 200 units but for orders of 200 and Knowledge b
above the price is Rs. 95. The annual inventory holding
costs is 10% of the value of the item and the ordering
cost is Rs. 5 per order. Find the economic lot size.
A commodity is to be supplied at the constant rate of 200
units per day. Supplies of any amount can be had at any
required time but each ordering costs Rs.50. Cost of
holding the commodity in inventory is Rs.2 per unit per
2 day while the delay in the supply of the item induces a Knowledge e
penalty of Rs.10 per unit per delay of 1 day. Find the
optimal policy (q,t), where is the reorder cycle period
and q is the inventory level after reorder. What would be
the best policy if the penalty cost becomes infinity
3 Describe various functions of inventory control? Analysis b
Monthly demand for an item is 200 units ordering cost is
Rs. 350, Inventory carrying charge is 24% of the
4 purchase price per year. The purchase prices are P1 = comprehension a
Rs. 10 For Purchasing Q1< 500 P2 = Rs. 9.25 For
Purchasing 500 ≤ Q2< 750 P3 = Rs. 8.75 For
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 66
Dept. of MECH
Purchasing 750 ≤ Q3 Determine optimum purchase
quantity. If the order cost is reduced to Rs. 100 per order
compute the optimum purchase quantity
What are the advantages and disadvantages of
5 comprehension b
inventory?
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VII
Tutorials
Short Answer Questions
Solve the following L.P.P. by the dynamic programming
1 approach:Maximize Z = 3x1 + 4x2. Subject to 2x1 + x2 Knowledge b
≤ 40; 2x1 + 5x2 ≤ 180; x1; x2 _≥ 0.
2 De_ne Bellman's principle of optimality Knowledge e
Solve the following LPP by dynamic
3 programming:Maximize Z = 8x1+7x2;Subject to 2x1+x2 Analysis b
≤ 8;5x1+2x2 ≤_5; x1; x2 ≥ 0.
Define the following terms in dynamic programming i)
4 comprehension b
Return Funtion ii) Recursive Funtion
Explain the relationship between stages and states in
5 comprehension e
dynamic programming
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VII
Tutorials
Long Answer Questions
Define the terms in dynamic programming : stage, state
1 Knowledge b
,state variables
2 State Bellman’s principle of optimality Knowledge e
3 Characteristic of dynamic programming problem Analysis b
State Bellman’s principle of optimality and explain by
4 an illustrative example how it can be used to solve comprehension a
multistage problem with finite number of stages?
Obtain minimum path by solving the given dynamic
5 comprehension b
programming problem?
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 67
Dept. of MECH
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VIII
Tutorials
Short Answer Questions
Define simulation. What are the advantages and
1 Knowledge b
disadvantages?
2 Discuss about various types of simulation models. Knowledge e
What is importance of simulation? Discuss about
3 Analysis b
advantages and disadvantages of Simulation
4 Explain simulation and significance of it. comprehension b
5 Define simulation. Explain about simulation languages comprehension e
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VIII
Tutorials
Long Answer Questions
1 Discusses various simulation models? Knowledge b
2 Discusses about simulation applications Knowledge e
Explain how simulation technique can be used in solving
3 Analysis b
(i).Queuing problems (ii).Inventory problem
Write short notes on advantages and disadvantages of
4 comprehension a
simulation?
What is simulation-modeling? How can simulation is
5 comprehension b
useful to solve queuing problems?
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 68
Dept. of MECH
9. 13 ASSIGNMENT QUESTIONS:
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-I
Assignments
Short Answer Questions
A company produces two types of leather belts say A and B.
Belt A is of superior quality and B is inferior. Pro_ts on the
two are 40 and 30 paise per belt, respectively. Each belt of
type A requires twice as much time as required by a belt of
type B. If all the belts were of type B, the company could
produce 1000 belts per day. But the supply of leather is
1 su_cient only for 800 belts per day. Belt A requires a fancy Evaluate e
buckle and only 400 of them are available per day. For belt
B only 700 buckles are available per day. Solve this problem
to determine how many units of the two types of belts the
company should manufacture in order to have a maximum
overall profit?
Solve the following Linear Programming Problem by Big-M
Method (Penalty Method)
Minimize Z=2X1− X 2
2 Subject to 3X1 + X 2 = 3 Remember a
4X1 + 3X 2 ≥ 6
X1 , X2 , X3 ≥ 0.
X 1 + 2X 2 ≤ 3 and X1, X 2≥ 0
Solve the following LPP by simplex method.
Maximize Z = 2X1 + 3X2 + X3
3 Subject to Understand a
X1 + 4X2 + 2X3 ≥ 8
3X1 + 2X2 ≥ 6
Find the minimum value of Z = 4X1 + 2X2
Subject to constraints: X1 + 2X2 ≥ 2
4 3X1 + X2≥3 Evaluate e
4X1 + 3X2≥6 and
X1, X2≥ 0
Find the maximum value of
Z = 5x1 + 7x2
Subject to the constraints
X1 + X2 ≤ 4
5 Evaluate e
3x1 + 8x2 ≤ 24
10x1 + 7x2 ≤ 35
X1 , X2 ≥ 0
Use the graphical method.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 69
Dept. of MECH
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-I
Long Answer Questions
Solve the following LLP using Simplex method.
Minimize Z = 2X1 +X2
1 Subject to the constraints Evaluate e
3X1 + X2 = 3, 4X1 + 3X2 ≥6
X1 + 2X2 ≤ 4 and X1, X2 ≥ 0
Find the minimum value of Z = 4X1 + 2X2
Subject to constraints: X1 + 2X2 ≥ 2
3X1 + X2≥3
2 Remember a
4X1 + 3X2≥6 and
X1, X2≥ 0
by graphical method.
3Solve the following LLP using Simplex method.
Minimize Z = 2X1 +X2
3 Subject to the constraints Understand a
3X1 + X2 = 3, 4X1 + 3X2 ≥6
X1 + 2X2 ≤ 4 and X1, X2 ≥ 0
Solve the following LP Problem by two phase method
Minimize Z = x1 - 2x2 -3x3
subject to the constraints
4 Evaluate e
-2x1 + x2 +3x3 = 2
2x1 + 3x2 + 4x3 =1
x1, x2 , x3 _ 0.
Solve the following LP Problem by two phase method
Maximize Z = 5x1 - 2x2 + 3x3
subject to the constraints
5 2x1 + 2x2 - x3 ≥ 2 Analysis b
3x1 - 4x2 ≤ 3
x2 +3x3 ≤ 5
x1, x2 , x3 ≥ 0
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 70
Dept. of MECH
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-II
Assignments
Short Answer Questions
ABC Limited has three production shops which supply a
product to warehouse. The cost of production varies
from shop to shop and cost of transportation from one
shop to a warehouse also varies. Each shop has a specific
production capacity and each warehouse has certain
amount of requirement. The costs of transportation are
given below:
I II III IV V Supply
A 6 4 4 7 5 100
1 B 5 3 7 4 8 125 Understand a
C 3 4 6 3 4 175
Demand 60 80 85 105 70 400
The cost of manufacturing the product at different
production shops is
Shop Variable Fixed Cost
A 14 7,000
C 15 5,000
Find the optimum quantity to be supplied from each shop
to different warehousesat minimum total cost.
Give a mathematical formulation of the transportation
2 Analysis b
problem and the simplex problem.
What are the differences in the nature of problems that
3 Understand b
can be solved by these methods?
The ABC Tool Company has a sales force of 25 men
who operate from three regional.
The company produces four basic product lines of hand
tools. Mr.Jain, the sales manager, feels that 6 salesmen
are needed to distribute product line I ; 10 to distribute
product line II; 4 for product line III and 5 salesmen for
product line IV. The cost (in Rs.) per day of assigning
4 Evaluate e
salesmen from each of the oces for selling each of the
product lines are as given in table 4.3 table 4 At the
preset time, 10 salesmen are allocated to o_ce A, 9 to
o_ce B and 7 salesmen to o_ce C. How many salesmen
should be assigned from each o_ce to sell each product
line in order to minimize costs? Identify alternate
optimum solutions..
How will you solve an Assignment problem, where a
5 Remember a
particular assignmentprohibited?
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 71
Dept. of MECH
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-II
Assignments
Long Answer Questions
A machine operator processes four types of items on his
machine and he must choose a
sequence for them. The set-up cost per change depends on
the item currently on machine and
the item to be made as given in table (DEC 2011
JNTU)
1 Remember a
Find the optimal solution for a given TP.
1 2 3 4
A 6 7 3 7 5
2 B 7 9 1 5 7 Understand a
C 6 5 16 7 8
D 18 9 10 2 10
10 5 10 5
.Find the optimum assignment for the given problem.
a b c d E
A 160 130 175 190 200
3 B 135 120 130 160 175 Analysis b
C 140 110 155 170 185
D 50 50 80 80 110
E 55 35 70 80 105
Find the optimum assignment for the given problem.
a b c d e
A 160 130 175 190 200
4 Understand b
B 135 120 130 160 175
C 140 110 155 170 185
D 50 50 80 80 110
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 72
Dept. of MECH
E 55 35 70 80 105
Find the optimal solution for a given TP.
1 2 3 4
A 6 7 3 7 5
5 B 7 9 1 5 7 Evaluate e
C 6 5 16 7 8
D 18 9 10 2 10
10 5 10 5
Blooms Cour
Sl.N Taxono se
Questions
o. my Outco
Level me
UNIT-III
Assignments
Short Answer Questions
.Find the following sequencing problem to minimize the time
elapsed with sequence M1&M2
Job 1 2 3 4 5 Analysi
1 b
Machine M1 7 10 8 9 7 s
Machine M2 2 1 4 0 5
Also find the total elapsed time and idle times of each machine.
decision has to be made for group replacement versus individual
replacement policy for 500 fluorescent tubes of a particular
make in the university campus. Failure rate for the tubes were
recorded as under
End of Month 1 2 3 4 5 6
Probability of Underst
2 failures b
and
0.11 0.3 0.25 0.2 0.1 0.04
Cost of replacing an individual tube is Rs. 55/- and when replaced
as group it is Rs.35/-
Find out whether group replacement policy is economical or not.
If economical at the end of which month should the tubes be
replaced as a group?
factory has a large number of bulbs all of which must be in
working condition. The mortality of
bulbs is given in the following table.
Proportion of bulbs failing during the week
Week Evaluat
3 1 0.1 e
e
2 0.15
3 0.25
4 0.35
5 0.12
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 73
Dept. of MECH
6 0.03
If a bulb fails in service, it costs 3.50 to replace, but if all bulbs are
replaced at a time it costs Rs. 1.20 each. Find the optimum
group replacement policy [Assume 1000 bulbs as available in
the beginning].
Determine the best sequence for ‘5’ jobs that will minimize the
elapsed time T, if each of the ‘5’ jobs must go through machines
A, B and C in the order ABC, The processing times are.
Job Processing time
A B C Remem
4 a
1 8 5 4 ber
2 10 6 9
3 6 2 8
4 7 3 6
5 11 4 5
Can you apply sequencing in day to day examples? Underst
5 a
h quick return mechanism for shape and
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-III
Assignments
Long Answer Questions
Explain the replacement strategy for items of low cost
1 Evaluate e
which fail suddenly.
The following failure rates have been observed for a
2 Remember a
certain type of light bulb.
End of Week : 1 2 3 4 5 6 7 8 Probability of failure :
3 Understand a
0.05 0.13 0.25 0.43 0.68 0.88 0.96 1.00
The cost of replacing an individual bulb is Rs. 2.25. The
decision is made to replace all bulbs simultaneously at
_xed intervals, and also to replace individual bulbs as
4 Understand b
they fail in service. If the cost of group replacement is
60 paise per bulb and the total number of bulbs is 1,000,
what is the best interval between group replacements?
Discuss in brief the replacement policy for the items that
5 deteriorate with time. Evaluate e
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 74
Dept. of MECH
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-IV
Short Answer Questions
Differentiate between strictly determinable games and
1 Remember a
non-determinable games.
With the help of an appropriate example establish the
2 relationship between `Game theory' and `Linear Understand a
Programming'.
Solve the game given in the table 8a by reducing to 2 _ 2
3 Analysis b
game by graphica method.
Explain the theory of dominance in the solution of
4 Understand b
rectangular games
In a game of matching coins with two players, suppose A
wins one unit of value when there are two tails and loses
5 1/ 2 unit of value when there is one head and one tail. Evaluate e
Determine the pay of matrix, the best strategies for each
player and the value of the game to A.
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-IV
Long Answer Questions
Two players A and B showing each other, put on a table
a coin, with head or tail up. A wins Rs 8 when both the
coins show head and Re 1 when both are tails. B wins Rs
1 3 when the coins do not match. Given the choice of Understand a
being matching player (A) or non-matching player (B)
which one would you choose and what would be your
strategy?
Define:i. Competitive game;ii. Pure strategies;iii. Mixed
2 strategies iv. Two-person zero-sum (or rectangular) Analysis b
game, v. Payoff matrix.
Player A and B, each take out one or two matches and
guess how many matches the opponent has taken. If one
of the players guesses correctly, then the loser to pay him
3 as many rupees as the sum of the number held by both Understand b
players. Otherwise, the pay out is zero. Write down the
pay of matrix and obtain the optimal strategies of both
players.
Explain Minimax and Maximin principal used in the
4 Understand a
theory of games.
5 What is an unbounded solution? Explain. Analysis b
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 75
Dept. of MECH
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-V
Assignments
Short Answer Questions
discuss the machine repair problem as a birth and depth
1 Understand a
problem.
customer arrive at a box office window , being managed
by a single individual according to a poisson input
process with mean rate of 30 per hour. The time required
2 to serve a customer has an exponential distribution with a Analysis b
mean of 90 seconds. Find the average waiting time of a
customer. Also determine the average number of
customers in the system and average queue lenth.
Repairing a certain type of machine which breaks down
in a given factory consists of 5 basic steps that must be
performed sequentially. The time taken to perform each
ofthe 5 steps is found to have an exponential distribution
3 with mean 5 minutes and is independent of other steps. If Understand b
these machines breakdown follows Poisson fashion at an
average rate of two per hour and if there is only one
repairman, what is the average idle time for each
machine that has broken down?
At what average rate must a clerk at a super market work
in order to ensure a probability of 0.90 that the customer
will not wait longer than 12 minutes? It is assumed that
4 Understand a
there is only one counter at which customers arrive in a
Poisson fashion at an average rate of 15 per hour. The
service by the clerk has an exponential distribution.
customer arrive at a first class ticket customer of theatre
in a Poisson distributed arrive rate of 25 per hours.
5 Analysis b
Service time is constant at 2 minutes calculate.a) mean
number in waiting time
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 76
Dept. of MECH
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-V
Assignments
Long Answer Questions
Patients arrive at a clinic according to a Poission
distribution at the rate of 30 patients per hour. The waiting
room does not accommodate more than 14 patients.
Examination time per patient is exponential with mean rate
1 Understand a
20 per hour? i). Find the effective arrival rate at the clinic?
ii). What is the probability that an arriving patient will not
wait? iii). What is the expected waiting time until a patient
is discharged from the clinic?
A firm is engaged in both shipping and receiving activities.
The management is always interested in improving the
efficiency by new innovations in loading and unloading
procedures. The arrival distribution of trucks is found to be
poission with arrival rate of two trucks per hour. The
2 Analysis b
service time distribution is exponential with unloading rate
of three trucks per hour. Find the following i). Average
number of trucks in the waiting line. ii). The average
waiting time of trucks in line. iii). The probability that the
loading and unloading dock and workers will be idle.
In a car garage A, it takes 15 minutes to wash one car. Cars
arrive to the garage at an average rate of one every 25
minutes and arrival process is poisson. In car garage B, it
takes 25 minutes to wash one car and cars arrive to this
3 shop at an average rate of one every 45 minutes, the arrival Understand b
process being poission during steady state. Determine (i).
At which garage you expect the bigger queue (ii). At which
garage you require more times waiting including the
service time?
If for a period of 2 hours in a day (8-10 AM) planes arrive
at the aerodrome for every 20 minutes but the service time
continuous to remain 32 minutes, then calculate for this
4 Remember a
period i). The probability that the aerodrome is empty ii).
Average queue length, on the assumption that the line
capacity of the aerodrome is limited to 6 planes.
Arrivals at a telephone booth are considered to be Poisson
distribution with an average time of 10 minutes between
one arrival and the next. The length of a telephone call is
5 Evaluate e
assumed to be distributed exponentially with mean 3
minutes. (a) What is the probability that an arrival will have
to wait more than 10 minutes before the phone is free?
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 77
Dept. of MECH
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VI
Assignments
SHORTAnswer Questions
A contractor has to supply 10,000 bearings per day to an
automobile manufacturer. He finds that when he starts
production run, he can produce 25,000 bearings per day.
The cost of holding a bearing in stock for a year is Rs. 2
1 Understand a
and the set up cost of production run is Rs. 180. How
frequently should production run be made? Also find
production run time and total variable cost (Assume 300
days in the year).
What is EOQ? Discusses step by step the development is
2 Analysis b
EOQ formula?
An engineering firm has determined from the analysis of
past accounting and production data that part number 607
has ordering cost of Rs. 350 per order and its cost Rs. 22
per part. The inventory carrying cost is 15% of the cost of
3 the item per year. The firm currently purchases Rs. Understand b
2,20,000 worth of this part every year. Determine the
Economic Order Quantity (EOQ). What is the time
between two orders? What is optimum number of orders
per year to minimize the cost for the firm?
Find the optimal order quantity for a product when the
annual demand for the product is 500 units, the cost of
4 storages per unit per year is 10% of the unit cost and Remember a
ordering cost per order is Rs. 180. The unit cost are given
below.
A contractor has to supply 10,000 bearings per day to an
automobile manufacturer. He finds that when he starts
production run, he can produce 25,000 bearings per day.
The cost of holding a bearing in stock for a year is Rs. 2
5 Evaluate e
and the set up cost of production run is Rs. 180. How
frequently should production run be made? Also find
production run time and total variable cost (Assume 300
days in the year).
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 78
Dept. of MECH
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VI
Long Answer Questions
A stockist has to supply 400 units of a product every
Monday to his customers. He gets the product at Rs.50 per
unit from the manufacturer. The cost of ordering and
1 transportation from the manufacturer is Rs.75 per order. Understand a
The cost of carrying inventory is 7.5% per year of the cost
of the product.Find. (a) The economic lot size. (b) The
total optimal cost (including the capital cost)
2 Discuss about significance of inventory. Analysis b
A stockist purchases an item at the rate of Rs. 40 per piece
from a manufacturer. 2,000 units of the item are required
3 per year. What should be the order quantity per order if the Understand b
cost per order is Rs.15 and the inventory charges per year
are 20 per cent?
Monthly demand for an item is 200 units ordering cost is
Rs. 350, Inventory carrying charge is 24% of the purchase
price per year. The purchase prices are P1 = Rs. 10 For
Purchasing Q1< 500 P2 = Rs. 9.25 For Purchasing
4 Remember a
500 ≤ Q2< 750 P3 = Rs. 8.75 For Purchasing 750 ≤
Q3Determine optimum purchase quantity. If the order cost
is reduced to Rs. 100 per order compute the optimum
purchase quantity
5 What are the advantages and disadvantages of inventory? Evaluate e
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VII
Assignments
Short Answer Questions
1 Characteristics of dynamic programming problem? Understand a
State Bellman’s principle of optimality and explain by an
2 illustrative example how it can be used to solve Analysis b
multistage problem with finite number of stages?
Write short notes on application of dynamic
3 Understand b
programming?
Suppose that a person want to select the shortest highway
route between two cities. The network shown below
4 Remember a
provider the possible routes between the starting, city at
node 1 and the destination city at node 7. The routes pass
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 79
Dept. of MECH
through intermediate cities designated by nodes 2 to 6.
Solve the problem of finding the shortest route using
dynamic programming.
Define the following terms in dynamic programming? i)
5 Evaluate e
State, ii) Stage
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VII
Assignments
Long Answer Questions
1 Discuss the applications of dynamic programming Understand a
Define the following terms in dynamic programming i)
2 Analysis b
Return Funtion ii) Recursive Funtion
what do you mean by forward and backward recursion in
3 Understand b
dynamic programming?
Define the following terms in dynamic programming i)
4 decision variable ii) optimal return iii) state Remember a
transformation function
find number of each of three items to be included in
package so that value of package will be maximum. Total
weight of package must not exceed 5kgs.
5 item Weight in kgs Value in Rs. Evaluate e
1 1 30
2 3 80
3 2 65
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 80
Dept. of MECH
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VIII
Assignments
Short Answer Questions
1 Discusses phases of simulation? Understand a
Mention any four reasons for solving OR problems by
2 Analysis b
simulation?
Write short notes on advantages and disadvantages of
3 Understand b
simulation?
What is simulation? Discusses the application of
4 Remember a
simulation?
Explain conceptual and operational model-building
5 Evaluate e
process?
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VIII
Assignments
Long Answer Questions
Explain the representation of times in discrete system
1 Understand a
simulation.
Explain multiplication congruential generator. What are its
2 Analysis b
limitation.
3 Discuss SIMULA and its features. Understand b
Discuss the steps in the development of a useful model of
4 Remember a
input data with suitable example.
Explain conceptual and operational model-building
5 Evaluate e
process.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 81
Dept. of MECH
10.0 POWER PLANT ENGINEERING (57023)
10.1 COURSE DESCRIPTION:
Course Code 57023
Course Title Power plant engineering
Lectures Tutorials Practicals Credits
Course Structure
5 1 - 4
Course Coordinator K. Sandeep kumar Asst.Professor
Team of Instructors B. Prashanth ,K. Sandeep kumar
COURSE OVERVIEW:
To provide a basic understanding of the wide range of activities encompassed by
personnel working in standards and calibration laboratories. It covers the measurement
process, types and correct use of measurement and test equipment, and measurement
standards. It provides an opportunity for students to learn about measurement
uncertainty and risk analysis. The course includes the procedures necessary to set up
and to have knowledge on calibration.
At the end of this subject the student is expected:
It is expected to enforce, validate and verify predefined standards for traceability,
accuracy, reliability, and precision. All of these are factors that would affect the validity
of measurement. Although these standards vary widely, these are mandated by the
government, the agencies, and some treaties. Consequently, these standards are verified
and tested against a recognized quality system in calibration laboratories
10.2 PREREQUISITES:
Level Credits Periods / Week Prerequisites
Thermodynamics,
UG 4 5
Thermal engineering
10.3 MARKS DISTRIBUTIONS:
University End Total
Sessional Marks
Exam marks marks
There shall be two midterm examinations. Each midterm
examination consists of subjective type and objective type
tests. The subjective test is for 10 marks of 60 minutes
75 100
duration. Subjective test of shall contain 4 questions; the
student has to answer 2 questions, each carrying 5 marks. The
objective type test is for 10 marks of 20 minutes duration. It
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 82
Dept. of MECH
consists of 10 Multiple choice and 10 objective type questions,
the student has to answer all the questions and each carries half
mark. First midterm examination shall be conducted for the
first two and half units of syllabus and second midterm
examination shall be conducted for the remaining portion.
University End Total
Sessional Marks Exam marks marks
Assignment
Five marks are earmarked for assignments. There shall be two
assignments in every theory course. Marks shall be awarded
considering the average of two assignments in each course.
10.4. EVALUATION SCHEME:
S. No Component Duration Marks
1 I Mid Examination 80 minutes 20
2 I Assignment - 05
3 II Mid Examination 80 minutes 20
4 II Assignment - 05
5 External Examination 3 hours 75
COURSE OBJECTIVES:
1. Formulating and solving complex mechanical engineering problems
2. Making use of appropriate laboratory tools and design innovative methods.
3. To motivate students to develop new innovative methods for measuring product
characteristics.
4. To enhance the ability to work as practicing mechanical engineers in
manufacturing industries and consulting firms.
5. Effectively utilizing the research data that published in journals, conference
proceedings
6. An ability to use the techniques, skills and modern engineering tools necessary
for engineering practice.
7. Improving skills to adopt modern methods in mechanical engineering as
continuous improvement.
8. To enhance the ability to face competitive exams like GATE, GRE, TOEFL etc
9. The broad education necessary to understand the impact of engineering solutions
in a global, economic, environment and societal context.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 83
Dept. of MECH
10.5 COURSE OUTCOMES:
1. Graduates will demonstrate basic knowledge in mathematics, science
engineering.(ME PEO-A)
2. Graduates will demonstrate the ability to design and conduct experiments and
analyze data, and report
3. results.(ME-PEO-B).
4. Graduates will demonstrate the ability to function on engineering and science
laboratory teams, as well as on multidisciplinary design teams.(ME-PEO-D)
5. Graduates will demonstrate the ability to identify, formulate and solve mechanical
engineering problems.(ME-PEO-E) Graduates will demonstrate an understanding
of their professional and ethical responsibilities.(ME-PEO-F)
6. Gradates will have the confidence to apply engineering solutions in global and
societal contexts.(ME-PEO-H)
7. Graduates should be capable of self-education and clearly understand the value of
life-long learning.(ME-PEO-I)
8. Graduates will be broadly educated and will have an understanding of the impact
of engineering on society and demonstrate awareness of contemporary issues.
9. Graduates will have the ability to recognize the importance of professional
development pursing post graduate studies or face competitive examinations that
offer challenging andrewarding careers in Mechanical Engineering.
10.6. HOW PROGRAM OUTCOMES ARE ASSESSED:
Program Outcomes Proficiency
Level
assessed by
A Graduates will demonstrate the ability to use basic
Assignments,
knowledge in mathematics, science and engineering and
H Tutorials,
apply them to solve problems specific to mechanical
Exams
engineering (Fundamental engineering analysis skills).
B Graduates will demonstrate the ability to design and
conduct experiments, interpret and analyze data, and report S Project work
results (Information retrieval skills).
C Graduates will demonstrate the ability to design any Assignments,
mathematical system or thermal that meets desired S Tutorials,
specifications and requirements (Creative skills). Exams
D Graduates will demonstrate the ability to function as a
Project
coherent unit in multidisciplinary design teams, and deliver S
work
results through collaborative research (Teamwork).
E Graduates will demonstrate the ability to identify, formulate
Assignments,
and solve mechanical engineering problems of a complex H
Exams
kind (Engineering problem solving skills).
F Graduates will demonstrate an understanding of their
Assignments,
professional and ethical responsibilities, and use technology H
Tutorials,
for the benefit of mankind(Professional integrity).
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 84
Dept. of MECH
G Graduates will be able to communicate effectively in both
S --
verbal and written forms (Speaking / writing skills).
H Graduates will have the confidence to apply engineering
Assignments,
solutions in global and national contexts (Engineering H
Tutorials,
impact assessment skills).
I Graduates should be capable of self-education and clearly
Assignments,
understand the value of life-long learning (Continuing H
Tutorials,
education awareness).
J Graduates will develop an open mind and have an
understanding of the impact of engineering on society and
S --
demonstrate awareness of contemporary issues (Social
awareness).
K Graduates will be familiar with applying software methods
and modern computer tools to analyze mechanical H --
engineering problems (Software hardware interface).
L Graduates will have the ability to recognize the importance
of professional development by pursing post graduate
Gate exam,
studies or face competitive examinations that offer
S Job
challenging and rewarding careers in Mechanical
interviews
Engineering (Successful career andimmediate
employment).
M Graduate will be able to design a system to meet desired
needs within environmental, economic, political, ethical Assignments,
health and safety, manufacturability and management H Tutorials,
knowledge and techniques to estimate time, resources to Exams
complete project (Practical engineering analysis skills).
N = N = None S = Supportive H = Highly Related
10.7 SYLLABUS:
UNIT I
Introduction to the Sources of Energy - Resources and Development of Power in India.
STEAM POWER PLANT: Plant Layout, Working of different Circuits, Fuel and
handling equipments, types of coals, coal handling, choice of handling equipment, coal
storage, Ash handling systems.
UNIT II
STEAM POWER PLANT: COMBUSTION PROCESS : Properties of coal - overfeed
and underfeed fuel beds, traveling grate stokers, spreader stokers, retort stokers,
pulverized fuel burning system and its components, combustion needs and draught
system, cyclone furnace, design and construction, Dust collectors, cooling towers and
heat rejection. Corrosion and feed water treatment.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 85
Dept. of MECH
UNIT III
INTERNAL COMBUSTION ENGINE PLANT: DIESEL POWER PLANT: Introduction
- IC Engines, types, construction- Plant layout with auxiliaries - fuel supply system, air
starting equipment, lubrication and cooling system - super charging.
UNIT IV
GAS TURBINE PLANT: Introduction - classification - construction - Layout with
auxiliaries – Principles of working of closed and open cycle gas turbines. Combined
Cycle Power Plants and comparision.
UNIT V
HYDRO ELECTRIC POWER PLANT: Water power - Hydrological cycle / flow
measurement – drainage area characteristics - Hydrographs - storage and Pondage -
classification of dams and spill ways.
HYDRO PROJECTS AND PLANT: Classification - Typical layouts - plant auxiliaries -
plant operation pumped storage plants.
UNIT VI
POWER FROM NON-CONVENTIONAL SOURCES: Utilization of Solar- Collectors-
Principle of Working, Wind Energy - types - HAWT, VAWT -Tidal Energy.
DIRECT ENERGY CONVERSION: Solar energy, Fuel cells, Thermo electric and
Thermo ionic, MHD generation.
UNIT VII
NUCLEAR POWER STATION : Nuclear fuel - breeding and fertile materials - Nuclear
reactor - reactor operation. TYPES OF REACTORS: Pressurized water reactor, Boiling
water reactor, sodium-graphite reactor, fast Breeder Reactor, Homogeneous Reactor, Gas
cooled Reactor, Radiation hazards and shielding - radioactive waste disposal.
UNIT VIII
POWER PLANT ECONOMICS AND ENVIRONMENTAL CONSIDERATIONS:
Capital cost, investment of fixed charges, operating costs, general arrangement of power
distribution, Load curves, load duration curve. Definitions of connected load, Maximum
demand, demand factor, average load, load factor, diversity factor - related exercises.
Effluents from power plants and Impact on environment - pollutants and pollution
standards - Methods of Pollution control.
TEXT BOOKS :
1. A Text Book of Power Plant Engineering / Rajput / Laxmi Publications
2. Power Plant Engineering - P.C.Sharma / S.K.Kataria Pub
REFERENCES :
1. Power Plant Engineering: P.K.Nag/ II Edition /TMH.
2. Power plant Engineering/ Ramalingam/ Scietech Publishers
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 86
Dept. of MECH
10.8 COURSEPLAN:
At the end of the course, the students are able to achieve the following course learning
outcomes. (The course plan is meant as a guideline.There may probably be changes).
Lecture Course Learning Outcomes Topics to be covered Referenc
No. e
UNIT I
Introduction to the sources of energy. T1
Understand the resources of https://www.youtube.com/watch?v=BB
1
energy Q2o0LcmnQ&index=1&list=PLwOhS
TeCfDgmA7LFqMnT0yb83dmr9esWZ
Resources and development of power in T1
Recognize the resources and India.
2 development of power in https://www.youtube.com/watch?v=BB
India. Q2o0LcmnQ&index=1&list=PLwOhS
TeCfDgmA7LFqMnT0yb83dmr9esWZ
Introduction to steam power plant. T1
Understand the steam power https://www.youtube.com/watch?v=8u
3
plant. wrMLrqQlU&list=PLwOhSTeCfDgmA
7LFqMnT0yb83dmr9esWZ&index=9
Plant layout , and working of different T1
circuits.
Analyze plant layout and
4 https://www.youtube.com/watch?v=8u
working of different circuits.
wrMLrqQlU&list=PLwOhSTeCfDgmA
7LFqMnT0yb83dmr9esWZ&index=9
Identify fuel and handling Fuel and handling equipments, types of T1
5
equipments, types of coals. coals.
Understand coal handling and Introduction to coal handling and T1
6
choice of handling equipment. choice of handling equipment.
Analyze Coal storage, ash T1
7 Coal storage, ash handling systems.
handling systems.
Unit-II
Introduction to combustion process,
Properties of coal, overfeed and
Compare properties of coal,
underfeed fuel beds. T1
8 overfeed and underfeed fuel
https://www.youtube.com/watch?v=BB
beds.
Q2o0LcmnQ&index=1&list=PLwOhS
TeCfDgmA7LFqMnT0yb83dmr9esWZ
Traveling grate stroker, spreader
Understand Traveling grate stroker. T1
9
stroker, spreader stroker. https://www.youtube.com/watch?v=BB
Q2o0LcmnQ&index=1&list=PLwOhS
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 87
Dept. of MECH
TeCfDgmA7LFqMnT0yb83dmr9esWZ
Retort stroker, pulverized fuel burning
Understand Retort stroker, system and its components.
T1
10 pulverized fuel burning https://www.youtube.com/watch?v=BB
system and its components. Q2o0LcmnQ&index=1&list=PLwOhS
TeCfDgmA7LFqMnT0yb83dmr9esWZ
Analyze Combustion needs T1
11 Combustion needs and draught system.
and draught system.
Design and construction Cyclone furnace design and T1
12
Cyclone furnace. construction.
T1
13 Explain Dust collectors Dust collectors
Analyze Cooling towers and T1
14 Cooling towers and heat rejection.
heat rejection.
Understand Corrosion and T1
15 Corrosion and feed water treatment.
feed water treatment.
T1
16 Class test -1 Class test-1
Unit-III
Introduction to diesel power plant.
Understand diesel power T1
17 https://www.youtube.com/watch?v=IXi
plant.
vYoSzQcI
IC engines T1
18 Understand IC engines. introduction.https://www.youtube.com/
watch?v=IXivYoSzQcI
Construction various types of Types of IC engines and its T1
19
IC engines. construction.
Analyze Plant layout with T1
20 Plant layout with auxiliaries.
auxiliaries.
Understand Fuel supply Fuel supply system and air starting T1
21
system and air starting equipments.
Understand Lubrication T1
22 Lubrication syatem and types.
system and types.
T1
23 Discuss Cooling systems. Cooling systems.
T1
24 Understand Super charging. Super charging.
UNIT-IV
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 88
Dept. of MECH
Introduction to gas turbine plants. T1
Understand to gas turbine https://www.youtube.com/watch?v=D0i1E
25
plants. _lE_TE&list=PLwOhSTeCfDgmA7LFqM
nT0yb83dmr9esWZ&index=8
Classifications and construction of gas T1
turbine plants.
Classify and construct various
26 https://www.youtube.com/watch?v=D0i1E
gas turbine plants.
_lE_TE&list=PLwOhSTeCfDgmA7LFqM
nT0yb83dmr9esWZ&index=8
Discuss Layout with T1
27 Layout with auxiliaries.
auxiliaries.
Define the working principle T1
Principles of working of closed and open
28 of closed and open cycle gas
cycle gas turbine
turbines.
Understand Combined cycle T1
29 Combined cycle power plant.
power plant.
Compare both closed and Comparision of both closed and open and T1
30
open and combined cycles. combined cycle.
T1
31 Problems. Problems.
Problems. Problems. T1
32
Problems. Problems. T1
33
Problems. Problems. T1
34
T1
35 CLASS TEST-2 CLASS TEST-2
UNIT-V
Introduction to hydro electric power plant. T1
Understand hydro electric https://www.youtube.com/watch?v=4LGxE
37
power plant. hBmIKw&index=11&list=PLwOhSTeCfD
gmA7LFqMnT0yb83dmr9esWZ
Water power hydrological cycle. T1
Understand Water power https://www.youtube.com/watch?v=4LGxE
38
hydrological cycle. hBmIKw&index=11&list=PLwOhSTeCfD
gmA7LFqMnT0yb83dmr9esWZ
Show Flow measurement and Flow measurement and drainage area T1
39
drainage area characteristics. characteristics.
40 Discuss various Hydrograph Hydrograph types. T1
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 89
Dept. of MECH
types.
T1
41 Explain Storage and pondage. Storage and pondage explanation.
Classify dams and spillways. T1
42 Classification of dams and spillways.
Classify Hydro projects and T1
43 Hydro projects and plant classification.
plant.
Discuss Typical layout and T1
44 Typical layout and plant auxiliaries.
plant auxiliaries.
Discuss Plant operation T1
45 Plant operation pumped storage plants.
pumped storage plants.
T1
46 Problems. Problems.
T1
47 Problems. Problems .
UNIT-VI
Introduction to power from non T1
conventional sources.
Analyze the power from non https://www.youtube.com/watch?v=ui
48
conventional sources. tYbtrH52M&list=PLwOhSTeCfDgm
A7LFqMnT0yb83dmr9esWZ&index=
14
Utilization of solar collectors. T1
https://www.youtube.com/watch?v=V
Understand utilization of solar
49 dL6C_O9ywU&list=PLwOhSTeCfDg
collectors.
mA7LFqMnT0yb83dmr9esWZ&inde
x=16
Working principle of solar collectors. T1
https://www.youtube.com/watch?v=V
Define the principle of solar
50 dL6C_O9ywU&list=PLwOhSTeCfDg
collectors.
mA7LFqMnT0yb83dmr9esWZ&inde
x=16
Explain Wind energy and Types of Wind energy explanation ,Types of T1
51
wind energy. wind energy .
Discuss HAWT, VAWT and tidal T1
52 HAWT, VAWT and tidal energy.
energy.
T1
53 Discuss Solar energy and fuel cells. Solar energy and fuel cells.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 90
Dept. of MECH
Discuss Thermo electric and Thermo electric and thermo ionic and T1
54
thermo ionic and MHD generator. MHD generator.
Class Test-3 T1
55 Class Test-3
UNIT-VII
Introduction to nuclear power station. T1
https://www.youtube.com/watch?v=uu
56 Understand nuclear power station. lD0KVkmWg&index=12&list=PLwO
hSTeCfDgmA7LFqMnT0yb83dmr9es
WZ
Nuclear fuel , breeding and fertile T1
material.
Understand Nuclear fuel , breeding https://www.youtube.com/watch?v=uu
57
and fertile material. lD0KVkmWg&index=12&list=PLwO
hSTeCfDgmA7LFqMnT0yb83dmr9es
WZ
Nuclear reactor and reactor operation. T1
https://www.youtube.com/watch?v=uu
Understand Nuclear reactor and
58 lD0KVkmWg&index=12&list=PLwO
reactor operation.
hSTeCfDgmA7LFqMnT0yb83dmr9es
WZ
Discuss Pressurized water reactor, Pressurized water reactor, Boiling T1
59
Boiling water reactor. water reactor.
Discuss Sodium graphite reactor, Sodium graphite reactor, Fast breeder T1
60
Fast breeder reactor. reactor.
Discuss Homogeneous reactor ,Gas Homogeneous reactor ,Gas cooled T1
61
cooled reactor reactor
Discuss Radiation hazards and Radiation hazards and shielding and T1
62
shielding and waste disposal waste disposal
Estimate Capital cost, investment T1
Capital cost, investment of fixed
of fixed charges, operating costs,
63 charges, operating costs, general
general arrangement of power
arrangement of power distribution.
distribution.
UNIT-VIII
Load curves and load duration curves, T1
connected load.
Generate Load curves and load
64 https://www.youtube.com/watch?v=BB
duration curves, connected load.
Q2o0LcmnQ&index=1&list=PLwOhS
TeCfDgmA7LFqMnT0yb83dmr9esWZ
65 Compute Maximum demand and Maximum demand and demand factor, T1
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 91
Dept. of MECH
demand factor, average load, load average load, load factor.
factor. https://www.youtube.com/watch?v=BB
Q2o0LcmnQ&index=1&list=PLwOhS
TeCfDgmA7LFqMnT0yb83dmr9esWZ
T1
66 Compute Diversity factor. Diversity factor.
Analyze Effluents from power T1
67 Effluents from power palnts.
plants.
Understand Impact on T1
68 Impact on environment.
environment.
Understand Pollutants and T1
69 Pollutants and pollution standard.
pollution standard.
10.9 APPINGCOURSEOBJECTIVESLEADINGTOTHEACHIEVEMENTOFPROGRAM
OUTCOMES:
Course Program Outcomes
Objectives a b c d e f g h i j k l m
I H S S H H H S H
II S S S
III H S S S H S
IV H S H
V H S H H H H
S = Supportive H = Highly Related
10.10
MAPPINGCOURSEOUTCOMESLEADINGTOTHEACHIEVEMENTOFPROGRAM
OUTCOMES:
Course Program Outcomes
Outcomes a b c d e f g h i j k l m
1 S H S H H S H H
2 S H H H H S H H
3 S H S H H S H H
4 S S S S S S S S
5 S S S S S S S S
S = Supportive H = Highly Related
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 92
Dept. of MECH
10.11 OBJECTIVE QUESTIONS:
UNIT-I
1. The average ash content in the Indian coal is about [ B]
A) 15% B) 20%
C) 30% D) 10%
2. Which of the following coal has the highest calorific value [B ]
A) Lignite B) Anthracite
C) peat D) None
3. Deaerative heating is done to [C]
A) Heat the water B) heat the air in the water
C) Remove dissolved gases in the water D) none of the above
4. The large amount of energy that can be released from a small mass of active particle is
[ A]
A) Nuclear energy B) wind energy
C) solar energy D) geothermal energy
5. A __________________ plant that converts chemical energy of the fossil fuels into
mechanical/electrical energy [D]
A) Internal combustion engine power plant B) Diesel combustion engine power
plant
C) Nuclear power plant D) Steam power plant
6. In steam power plant the steam carrying pipes are generally made of [A]
A) Steel B) Iron
C) Manganese D) Bronze
7. Method which is commonly used for unloading the coal for small power Plant is coal
accelerator
8. In Pulverised Fuel firing system coal is reduced to fine power.
9. Economiser is a device in which the waste heat of the flue gases is utilized for Heating
the feed
water.
10. Steam power plant works on Rankine cycle
UNIT-II
1. Example of overfeed type stoker is [D ]
a) Chain grate b) spreader c) Travelling grate d) All
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 93
Dept. of MECH
2. The Percentage of temperature of cooling water which leaves the diesel engine is not
more than [D]
a) 40% b) 30% c) 80% d) 60%
3. The process of removing dissolved oxygen is known as………. [c ]
a) Filtration b) Sedimentation c) Deaeration d) Coagulation
4. Combination of the forced and induced system is ………………….. [b ]
a) Steam jet draught b) Balanced draught c) Natural draught d) None of the above
5. ……………..Draught is obtained by the use of chimney [ b]
a) Forced b) Natural c) balanced d) steam jet
6. The __________________ are used for large capacity boiler installation where the coal
is burnt with pulverization [ a]
a) Overfeed stoker b) spreader stoker c) chain grate stoker d) travelling stoker
7. The efficiency of the pulverized fuel burning system depends on the [c ]
a) Fineness of the coal b) furnace volume c) size of powder d) none of the above
8. The combination of the forced and induced draught system is [c ]
a) Artificial draught b) steam jet draught c) balanced draught d) chimney draught
9. In a pulverized fuel burning the amount of air which is used to carry the coal and to dry
it before entering into the combustion is known as [ a]
a) Primary air b) Secondary air c) Both a & b d) None of the above
10. The admittance of oil between two surface having relative motion is known as [ b]
a) Liquid cooling b) Lubrication c) Fuel Injection d) Air cooling
UNIT-III
1. The Total approximate electricity produced in the world with the help of thermal
power plant is [ A]
a) 80% b) 60% c) 50% d) 90%
2. The octane number of the fuel used for diesel engine in India is in the range of [ B]
a) 60-70 b) 40-45 c) 80-90 d) None
3. Compression Ignition engines are also called as [ C]
a) Petrol engine b) gas engine c) diesel engine d) All
4. The admittance of oil between two surfaces having relative motion is known as [a ]
a) Lubrication b) Fuel injection c) cooling d) None of the above
5. Diesel engine power plant works on ……………Cycle[ d]
a) Rankin b) Otto c) Brayton d) Diesel
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 94
Dept. of MECH
6. In diesel cycle [b ]
a) Compression ratio and expansion are equal
b) Compression ratio is greater than expansion ratio
c) Compression ratio is less than expansion ratio
d) Compression ratio = (expansion ratio)2
7. The purpose of the lubrication is[d ]
a) To reduce the friction and wear between parts
b) To cool the surfaces by carrying away heat generation
c) To carry away the carbon and metal particles caused by wear d) All the above
8. In the gas power plants the temperature of gas is increases then the efficiency of the
Plant is Increase
9. The purpose of supercharging is to increase Volumetric efficiency
10. Splash Lubrication is suitable for low and medium speed engines of diesel power
UNIT-IV
1. The capacity of the steam power plant is expressed in terms of [ B]
a) Load vector b) steam rate c) Rate of power d) None
2. A closed cycle gas turbine works on [ B]
a) Carnot cycle b) Joule cycle c) Atkinson cycle d) Rankine cycle
3. The blades of the gas turbine rotor are made up of [ D]
a) C.I b) Steel c) carbon steel d) High nickel alloy
4. Compression ration of diesel engines is in the range [c ]
a) 8 to 10 b) 7 to 10 c) 16 to 20 d) none of the above
5. Thermal efficiency of closed cycle gas turbine plant increases by [ d]
a) re heating b) inter cooling c) regenerator d) all of the above
6. In a two stages gas turbine plant reheating after first stage [a ]
a) increases work ratio b) decreases work ratio c) dose not affect work ratio d) none of
the above
7. The combination of both engine efficiency and compressor efficiency of turbine and
compressor is called [b ]
a) Thermal efficiency
b) Machine efficiency
c) Combustion efficiency
d) None of the above
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 95
Dept. of MECH
8. The future demand of the electricity can be estimated with the help of
Gross national product
9. Rankine cycle efficiency of a good steam power plant may be in the range of
35-45%
10. The mechanical efficiency of a gas turbine as compared with I.C.engine is high
UNIT-V
1. The annual depreciation of a hydropower plant is about [ B]
A) 5-10% B) 0.5-1.5% C) 10-15% D) 15-20%
2. Water hammer is developed in [ C]
A) Turbine B) Surge tank C) Penstock D) Dam
3.Location of the surge tank in a hydro-electric station is near to the [A ]
A) Turbine B) tailrace C) Reservoir D) None
4. ……………….is the graph between discharge(run-off) of flowing water and time [ B]
a) Flow duration curve b) Hydrograph c) Mass curve d) None of the above.
5.The large amount of energy that can be released from a small mass of active particle
is……..energy [A]
a) Nuclear b) Wind c) Geothermal d) Solar
6. Which of the fallowing is the example of open conduit [ C]
a) Penstock b) Tunnel c) Canal d) Pipeline
7. A closed channel excavated on through a natural obstruction such as a ridge of higher
land between the dam and the power house [D]
A) Flume B) Penstock C) Barrier D) Tunnel
8. A _______is a barrier to raise water for storage to create a hydraulic head. [B]
a) Spillway b) Dam c) Penstock d) Tail pond
9. __________is a small receiver or tank in which the water level rises or falls to
reduce thePressure swings. [A]
A) Surge tank B) Reservoir C) Spillway D)Pressure tank
10. The periodic rise and fall of water level of sea in called [A]
a) Tide b) Dam level c) Swing d) Periodic swing
11. This type of dam resists the water force by being braced against the canyon sides
because of its curved shape [B]
A) Timber dam B) Arch Dam C) Buttress Dam D) Solid Gravity Dam
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 96
Dept. of MECH
12. The construction of arch dams are preferred at areas like [A]
A) Narrow valleys B) Poor rock and Earth foundation
C) wide valley with weak foundation D) wide valley with good foundation
13. The level head of medium head power plant ranges from [C]
A) 100m to 1000m B) 30m to 500m C) 10m to 15m D) Less than 15m
14. The level head of low head power plant ranges from [D]
A) 100m to 1000m B) 30m to 500m C) 10m to 15m D) Less than 15m
15. The level head of high head power plant ranges from [A]
A) 100m and above B) 30m to 500m C) 10m to 15m D) Less than 15m
16. The world’s first hydro-electric project was started in the year [B]
A) 1872 B) 1882 C)1880 D) 1914
17. India’s first major hydro-electric project, Siva samudram scheme is located in
[D]
A) Maharastra B) Tamil Nadu C) Kerala D) Karnataka
18. Nagarjun Sagar dam is the best example of [B]
A) Buttress dam B) Solid gravity dam C) Timber dam D) Arch dam
19. Which of the following turbine categorised under impulse type turbine? [A]
A) Pelton turbine B) Francis turbine C) Kaplan turbine D) Propeller turbine
20. Propeller turbine is similar to [C]
A) Pelton turbine B) Francis turbine C) Kaplan turbine D) Impulse turbine
UNIT-VI
1. In which units the nuclear energy is measured [D ]
A) Joule B) HP C) MW D) MeV
2. Most widely used material for a solar cell is [ C]
A) Steel B) Cadmium C) Silicon D) Copper
3. The conversion efficiency of a fuel cell is in range of [D ]
A) 40% B) 50% C) 55% D) 70%
4. The principle involved in Thermo electric generator is [ A]
A) Seebeck B) Hall C) Faraday D) All
5. The function of solar collector is to convert solar energy into …………… [ C]
A) Electricity B) Shaft work C) Thermal energy D) None
6. The nature of current developed by MHD generator is [A]
A) Direct Current B) Alternate Current
C) both AC& DC D) neither AC& DC
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 97
Dept. of MECH
7. The solar radiation received from the sun without change of direction is called [ A]
A)Beam Radiation B) Lunar Radiation C) Sun rays D) Radiance
8. Flat plant collectors are suitable for only ________temperature application [ B ]
A) High B) Low C) Moderate D) Zero
9. The following is one of the advantage of wind mill [A]
A) Economically competitive B) Overall power system weight is high
C) Low energy density D) Maintainance needed
10. This type of wind mill has high efficiency [C]
A) Multiple blade type B) Savonius type
C) Darrieus type D) All the above
11. Air in motion is called [B]
A) Breeze B) Wind C) Typhoon D) Motion air
12. This type of wind mill is self-starting [B]
A) Multiple blade type B) Savonius type
C) Darrieus type D) All the above
13. The main disadvantage of wind energy is [D]
A) Renewable energy source B) Economically competitive
C) Ideal choice for rural and remote areas D) Low energy density
14. These winds are caused by unequal heating and cooling of ground surfaces and ocean
surfaces during day and night [A]
A) Local winds B) Planetary winds C) Equatorial winds D) Monsoon winds
15. Wind speed increases roughly as ___th power of height. [B]
A) 1/5 B) 1/7 C) 2/5 D) 3/7
16. Which of the following type is not he type of non-conventional sources of energy
[C]
A) Tidal energy B) Thermionic energy
C) Hydro-electric energy D) Geothermal energy
17. Wind mills are not used for [B]
A) Electrical generation B) Steam turbines C) Drainage D)Grinding grains
18. --------is a device which converts heat energy of a fuel into electrical energy with out a
conventional electric generator [ D]
A) fuel cell B) Steam turbines C) thermo-electric generator D) MHD generator
19. ---------------------is defined as the generation of an e.m.f as a result of absorption of
ionizing radiation [ D]
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 98
Dept. of MECH
A) fuel cell B) Steam turbines C) thermo-electric generator D) photovoltaic effect
20. -----------is an electro-chemical device in which the chemical energy of a conventional
fuel is converted directly into low voltage, direct current electrical energy [ A]
A) fuel cell B) Steam turbines C) thermo-electric generator D) photovoltaic effect
UNIT -VII
1. In India the first nuclear power plant was started at [C ]
A) Narora B) Kota C) Tarapur D) Kalpakkam
2. Which of the fallowing is not suitable as moderator for nuclear power plant……… [ C]
a) Water b) Heavy water c) Mercury d) Graphite
3. India first nuclear power plant was installed at ……………… [ A]
a) Tarapur b) Kota c) Kalpakam d) Chandrapur
4. In a pressurized water reactor (PWR) ……………………. [ C]
a) The coolant water is pressurized to work as moderator
b) The coolant water boils in the core of reactor
c) The coolant water is pressurized to prevent boiling of water in the core
d) No moderator is used.
5. In MHD generators the conductor employed is ……………………. [ C]
a) Gas b) Liquid metal c) Liquid Metal or Gas d) None of the above.
6. Fast bread reactor is best suitable for India because of large []
a) Thorium deposit b) uranium deposit c) plutonium d) none of the above
7. The function of a moderator in a nuclear reactor is []
a) To slow down the fast moving neutrons b) To speed up the slow moving neutrons
c) To start the chain reaction d) To transfer the heat produced inside the reactor to heat
exchange
8. Some materials are not fissionable by themselves but they can be converted to the
fissionable
Materials are known as Fertile materials.
9. Moderator function is to absorb the part of kinetic energy of neutrons in nuclear power
plant.
10. In MHD generators the conductor employed is ……………………. [ C]
a) Gas b) Liquid metal c) Liquid Metal or Gas d) None of the above.
UNIT - VIII
1.The value of load factor in geothermal plant as compared to the fossil fuel plants
[ B]
A) Less B) More C) Same D) None
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 99
Dept. of MECH
2. Load factor of a power station is generally about [ B]
A) Equal to unity B) Less than unity C) More than unity D) None
3. Diversity factor is always ………………….. [ B]
a) Equal to unity b) more than Unity c) Less than Unity d) None of the above
4. Load factor of power station is defined as []
a) Maximum demand / average load b) Maximum demand * average load
c) Average load /maximum demand d) none of the above
5. The annual depreciation of a hydropower plant is []
a) 20to25% b) 15to20% c) 10to15% d) 0.5to1.5%
6. Demand factor is defined as []
a) Average load /maximum demand b) maximum demand/connected load
c) Connected load/ maximum demand d) maximum demand*connected load
7. The ratio of average load to maximum demand is Loadfactor
8. The ratio of power developed by wind mill rotor to maximum power available in the
wind is called Co-efficient of performance
9. The ratio of maximum demand to connected load is calledDemand factor
10. Diversity factor is always ………………….. [ B]
a) Equal to unity b) more than Unity c) Less than Unity d) None of the above
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 100
Dept. of MECH
12. 12 TUTORIAL QUESTIONS:
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-I
Tutorials
Long Answer Questions
1 What are the basic coal ingredients? Knowledge a
2 How do basic coal ingredients affect furnace design. Knowledge a
What are the different components used in steam power
3 Analysis a
plant?
4 Discuss the advantages of power stations. comprehension b
5 Discuss the disadvantages of power stations. comprehension a
6 Name various drought systems Knowledge b
What are the different components used in steam power
7 Knowledge e
plant?
8 what do you understand by ash plant handling of coal? Analysis c
9 What are the different methods of ash plant handling? Analysis a
What are the different types of coal handling
10 Knowledge a
equipments?
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-II
Tutorials
Long Answer Questions
What is the function of a coaling tower? How does it
1 Analysis b
operate?
2 Describe a cyclone separator. comprehension a
3 Explain the carry over losses in cooling towers. comprehension b
4 what is a stoker? Analysis e
Differentiate between over feed and underfeed
5 Knowledge b
stroker.
Draw a neat diagram of a cyclone burner and describe
6 comprehension b
it’s working.
Explain with neat diagram the working of different
7 Analysis a
types of mechanical dust collectors.
Make a neat sketch and explain the working of Chain
8 Knowledge b
Stroker
Make a neat sketch and explain the working of
9 Knowledge e
spreader stroker.
Explain about the balanced draught system with neat
10 Knowledge b
diagram.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 101
Dept. of MECH
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-III
Tutorials
Long Answer Questions
Explain with sketch the methods of super charging in diesel
1 Knowledge b
engine?
Given the differences between steam engine and IC
2 Knowledge e
engine.
3 Explain about the pressurised lubrication system Analysis b
4 Discuss about the wet sump lubricating system. comprehension a
5 Explain about the splash system with neat diagram. comprehension b
6 Explain the different types of fuel injection system. Knowledge b
7 List out some applications of a diesel engine plant. Knowledge b
8 Explain about the splash lubricating system. Analysis e
9 Discuss about the wet sump lubricating system. Analysis b
Explain with sketch the methods of super charging in
10 diesel engine? Knowledge a
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-IV
Tutorials
Long Answer Questions
Explain about closed cycle gas turbine with diagram.
1 Comprehension b
A gas turbine plant is designed to develop 5 MW
power. The inlet pressure and temperature of the air to
the compressor is 1 bar and 30oC. The pressure sure
ratio of the cycle is 5. A rather is used between two
turbines at a pressure of 2.24 bar. Calculate the overall
2 Analyze e
efficiency of the cycle and mass flow rate assuming the
following data. Isentropic η of the compressor = 80%
Isentropic η of the turbines = 85%.Cpa = 1 KJ/kg-k,
Cpg = 1.15 KJ/kg-k, γ = 1.4 for air γ = 1.33 gases.
Neglect the mass of the fuel.
3 Describe short note on lignite coal Comprehension b
Calculate the below factors of a simple gas turbine
4 plant operating on Brayton cycle. The maximum and Analyze e
minimum temperatures are 1000K and 288K
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 102
Dept. of MECH
respectively. The pressure if the unit consumes 2
tonnes of oil per hour of C.V 46500 KJ per kg,
determine the power generated. The mechanical
efficiency is 90% and generation efficiency is 85%. a)
Turbine Efficiency b) Specific work output
Illustrate the principle of working of closed cycle gas
5 Application b
turbine.
Calculate the efficiency and specific work output of a
simple gas turbine plant operating on Brayton cycle.
The maximum and minimum temperature is 1000k and
288 k respectively. The pressure ratio is 6. The
isentropic efficiency ofCompressor and turbine are 85
6 Analyze e
and 90 percent respectively. If the unit consumed2
tonnes of oil per hour of C.V. 46500 K.J per kg,
determine the power generated.
The mechanical efficiency is 90% and generator
efficiency is 85%.
Explain the difference between open and closed cycle
7 Analysis b
MHD systems and discusstheir relative merits.
A four stroke diesel engine gives the following test
results at a speed of 450 rpm.
Mean effective pressure = 8 bar
Cylinder bore = 22 cm
Stroke length = 26 cm
Specific fuel consumption = 0.4 kg/kw-hr
8 Calorific value of fuel = 42000 kJ/kg Analyze e
Mechanical efficiency = 38%
Determine
(a) BP
(b) IP
(c) Indicated thermal efficiency
(d) Brake thermal efficiency.
With a neat sketch explain the working of a simple
9 constant pressure gas turbine.Mention its advantages Knowledge b
and disadvantages.
What are the different methods used to improve the
10 thermal efficiency of the opencycle gas turbine plant? Knowledge e
Draw and explain with neat sketches.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 103
Dept. of MECH
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-V
Tutorials
Long Answer Questions
What are the various factors to be considered in
1 Knowledge b
selecting the site for a hydroelectric power plant?
Explain the term hydrograph, flow duration curve and
2 Knowledge e
mass curve?
Explain the construction and features of different types
3 Analysis b
of dams?
Explain about the different types of surge tank with
4 comprehension a
neat diagrams?
5 List out the functions of surge tank? comprehension b
List out some of the advantages and disadvantages of
6 Knowledge b
hydroelectric power plant?
7 Explain the term catchment area? Knowledge e
8 Discuss about primary and secondary investigation. Analysis b
Explain the construction and features of different types
9 Analysis b
of dams?
10 List out the functions of surge tank? Knowledge e
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VI
Tutorials
Long Answer Questions
1 List out the advantages of solar flat plate collector? Knowledge a
Classify tidal power plant and briefly explain double
2 Application a
basin system?
3 Explain the working of fuel cell, with neat diagram Comprehension a
Discuss the advantages and disadvantages of
4 Comprehension b
horizontal axis wind mills?
5 Examine the working of a fuel cell. Analyze a
6 Explain the working of VAWT Knowledge b
7 Explain the working of HAWT Knowledge e
8 Analyze the working of MHD generator Analysis c
9 Analyze the working of theromo ionic generator Analysis a
10 Explain the working of thermo-electric generator Knowledge a
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 104
Dept. of MECH
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VII
Tutorials
Long Answer Questions
1 List out the functions of cladding? Knowledge a
2 Classify the functions of shields? Application a
Illustrate the advantages and disadvantages of
3 Application a
pressurized water reactor?
Explain the advantages and disadvantages of it
4 Analysis b
breeder reactor
5 Describe a Homogeneous reactor Knowledge a
6 Describe a boling water reactor? Knowledge b
7 Describe a pressurized water reactor Knowledge e
8 Analyze liquid cooled reactor Analysis c
9 Analyze gas cooled rector Analysis a
10 Describe a sodium nuclear reactor Knowledge a
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VIII
Tutorials
Long Answer Questions
A central power station has annual factors as follows,
load factor = 60%, capacity factor = 40%, use factor =
50%, power station has a maximum demand of
1 Analysis a
15000KW. Determine (i) annual energy production.
(ii) Reserve capacity over and above peak load. (iii).
Hours per year not in service?
The maximum demand of a factory is 250 KW and
annual load factor is 50%.This load is to be supplied
by a diesel plant costing Rs.400 per KW and having a
running cost for fuel and oil of 6 paise per kwh
2 Analysis a
generated rate of interest and depreciation on diesel
engine plant is 10%. The wages of the operating staff
per year are Rs. 5000. Calculate the total annual cost
of providing this supply?
A power plant has the installed capacity of 120MW
3 Analysis a
calculate the cost of generation, if capital cost = Rs
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 105
Dept. of MECH
120x106, rate of interest and depreciation = 18%,
annual cost of fuel oil, salaries and taxation = Rs
25x106, load factor = 40%?
In a 60 MW steam power station working at 40% load
factor the the power station if load factor is improved
4 Analysis b
by 50% due to increased energy generation the fuel
cost increases the annual generation cost of 6%?
What do you understand by FBC? Explain its working
5 principle with a neat Analysis a
sketch.
6 Explain load, average load, load factor Knowledge b
7 Explain diversity factor Knowledge e
8 Analyze load factor Analysis c
9 Analyze effluents from pollution of power plants Analysis a
Discuss the methods to reduce pollution from power
10 Knowledge a
plants
12. 13 ASSIGNMENT QUESTIONS:
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-I
Long Answer Questions
Draw a chart showing operations and devices used in
1 Evaluate e
coal handling plant.
Describe various types of burners used to burn
2 Remember a
pulverized coal.
Name various draught systems. Describe the operation
3 of a balanced draught Understand a
System.
What is the importance of thermal power development
4 in the country? Describe Evaluate e
its development during the last six plans period.
What will be the future planning of power generation
6 Understand b
in India?
Why Non conventional sources are considered as
future major power resources to
7 Evaluate e
Face power crisis in the world? Which of them are
more prominent? and justify.
Explain the different components used in steam power
8 Remember a
plant.
9 Describe different types of coal conveyors. Understand a
What are the basic coal ingredients and how do they
10 Evaluate e
affect furnace design.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 106
Dept. of MECH
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-II
Assignments
Long Answer Questions
Draw a neat diagram of a power generating system
1 illustrating the use of at plate collector as a source of Remember a
energy.
Draw the arrangement of combined cycle and explain
2 Understand a
its working.
What are the advantages of unitised bed combustion
3 Analysis b
system?
4 what is a stoker? What are the different types of stoker? Understand b
Draw a neat diagram of cyclone burner and explain its
5 Evaluate e
outstanding features.
What is the principle of operation of feed water
6 Remember a
treatment plant?
What are the advantages and disadvantages of
7 Understand a
pulverized coal firing?
How forced draught systems differ from natural draft?
8 Analysis b
With neat sketch explainthe balanced draught system.
Explain the operation of a travelling grate stoker with
9 Understand b
the help of Neat sketch.
10 List out the advantages of combined cycle Analysis b
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-III
Assignments
Long Answer Questions
Explain with the help of a block diagram the fuel
1 Evaluate e
storage and supply system of diesel power plant
Explain the essential components and there functions in
2 Remember a
a diesel power plant.
In a gas turbine power plant working on Joule cycle, air
is compressed from 1kg/cm2 and 170C through a
3 pressure ratio of 6. It is then heated in the combustion Understand a
chamber to 2000C and expanded to a pressure of
1kg/cm2. Calculate the following Cycle efficiency
4 List the advantages of super charging of diesel engines. Understand b
Describe about maintenance schedule for Diesel engine
5 Evaluate e
power plant.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 107
Dept. of MECH
Explain with the help of a block diagram the water
6 Understand b
cooling system of diesel Power plant.
Explain the operation of a fuel pump? How the fuel
7 Evaluate e
supply to the engine is Regulated.
8 In what fields Diesel electric power plants are used? Remember a
What are the functions of spillways, baffle piers and
9 Understand a
drainage gallery in a Hydraulic power plant?
10 What are storage and pond age in a power plant? Understand b
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-IV
Assignments
Long Answer Questions
With a neat sketch explain the working of a simple
1 constant pressure gas turbine.Mention its advantages Understand a
and disadvantages.
What are the different methods used to improve the
2 thermal efficiency of the opencycle gas turbine plant? Analysis b
Draw and explain with neat sketches.
Calculate the efficiency and specific work output of a
simple gas turbine plant operating on Brayton cycle.
The maximum and minimum temperatures are 1000k
3 Evaluate e
and 288 k respectively. The pressure ratio is 6. The
isentropic efficiencies of compressor and turbine are 85
and 90 percents respectively.
Explain the principle of working of closed cycle gas
4 Understand a
turbine
Describe the working of a closed cycle gas turbine
5 Analysis b
power plant. Mention its advantages and disadvantages.
Calculate the efficiency and specific work output of a
simple gas turbine plant operating on Brayton cycle.
The maximum and minimum temperature is 1000k and
288 k respectively. The pressure ratio is 6. The
isentropic efficiency ofCompressor and turbine are 85
6 Evaluate e
and 90 percent respectively. If the unit consumed2
tonnes of oil per hour of C.V. 46500 K.J per kg,
determine the power generated.
The mechanical efficiency is 90% and generator
efficiency is 85%.
Explain the difference between open and closed cycle
7 Remember a
MHD systems and discusstheir relative merits.
8 A four stroke diesel engine gives the following test Evaluate e
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 108
Dept. of MECH
results at a speed of 450 rpm.
Mean effective pressure = 8 bar
Cylinder bore = 22 cm
Stroke length = 26 cm
Specific fuel consumption = 0.4 kg/kw-hr
Calorific value of fuel = 42000 kJ/kg
Mechanical efficiency = 38%
Determine
(a) BP
(b) IP
(c) Indicated thermal efficiency
(d) Brake thermal efficiency.
With a neat sketch explain the working of a simple
9 constant pressure gas turbine.Mention its advantages Understand b
and disadvantages.
What are the different methods used to improve the
10 thermal efficiency of the opencycle gas turbine plant? Understand b
Draw and explain with neat sketches.
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-V
Long Answer Questions
What are the various factors to be considered in
1 Understand a
selecting the site for a hydroelectric power plant?
Explain the construction and features of different types
2 Remember b
of spillways?
Explain the construction and features of different types
3 Remember b
of dams?
Explain about the different types of surge tank with
4 Remember a
neat diagrams?
5 List out the functions of surge tank? Understand a
List out some of the advantages and disadvantages of
6 Analysis e
hydroelectric power plant?
7 Explain the term catchment area? Understand a
8 Explain the operation of pumped storage plant? Analysis b
9 List out the functions of surge tank? Understand b
What are the various factors to be considered in
10 Understand a
selecting the site for a hydroelectric power plant?
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 109
Dept. of MECH
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VI
Long Answer Questions
Discuss the advantages and disadvantages of direct
1 energy conversion systerms over the conventional Understand a
power generation systems?
Explain brief ly about the various types of non
2 Remember b
conventional energy sources.
What is the basic difference between thermo-electric
3 Remember b
and thermionic conversion systems?
Explain the working of thermionic systems with neat
4 sketches and explain the effects of those factors which Remember a
control the power generation capacity.
Explain the working of a fuel cell.What are the merit
5 Understand a
and demerits of fuel cell.
What is the importance of the parameter gas
6 Analysis e
conductivity in MHD Generation?
Explain the MHD cycle combined with thermal power
7 Understand a
cycle with neat sketch.
8 List out the advantages of solar flat plate collector? Analysis b
Describe the working of distributed type solar thermal
9 Understand b
power generating unit with neat diagram?
Write short notes on solar energy collector and its
10 Understand a
utilization?
Blooms
Course
l.No. Questions Taxonomy
Outcome
Level
UNIT-VII
Assignments
Long Answer Questions
What is boiling water reactor? How does it differ from
1 pressurized water reactor? Give the classification of Understand a
nuclear wastes in detail.
What is a moderator? What you understand by
thermal shielding? Describe in brief giving neat
2 Remember a
sketch, the working of a pressurized water reactor
plant.
What is a moderator in nuclear reaction? Explain the
3 desirable properties ofgood moderator.How are Understand a
nuclear reactors classified?
4 What factors are considered in selecting an Evaluate e
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 110
Dept. of MECH
economical site for nuclear powerplant?Explain fast
breeder reactor with a sketch.
With the help of a sketch explain the working of
5 electro static precipitator.Discuss the factors affecting Analysis b
the performance of electro static precipitator.
How does a nuclear fission differ from nuclear fusion?
Enumerate and explain the essential components of
6 Understand b
nuclear reactor. What are the advantages of gas cooled
reactors?
What are the different fuels used in nuclear power
7 plants. Evaluate e
Describe a Homogeneous reactor.
Explain the characteristic features of Pressurized
8 Remember a
Water Reactor.
Explain the function of a moderator. What is the
9 Understand a
criterion of its effectiveness?
10 Give a brief account of nuclear waste disposal. Remember a
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VIII
Long Answer Questions
Explain brief the following:
1 i. Capital or fixed cost Evaluate e
ii. Operational cost..
What are the various factors to be considered in
2 selecting the site for a hydro-electric power plant and Remember a
discuss about primary and secondary investigations.
3 Explain the various methods to reduce the pollution Understand a
Briefly explain fossil fuel pollution.What are the
4 effects of SO2, NO2 and hydrocarbons on the human Remember a
and croplives?
Briefly explain fossil fuel pollution.What is acid rain?
5 Remember a
Explain acid rain.
What do you understand by FBC? Explain its working
6 principle with a neatsketch.What are the major Understand b
advantages of FBC system over conventional one?
What do understand by acid rains? What are the
7 reasons of this? How arethey controlled?Explain the Understand b
pollution due to nuclear power plant.
Define “connected load ” , “Max. Demand” Demand
factor and load factor. A power station supplies the
8 following loads to the customers. Evaluate e
Time (Hr) 0-6 6-10 10-12 12-16 16-20 20-22 22-24
Load (MW) 20 50 60 40 80 70 40
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 111
Dept. of MECH
What is meant by power plant economics ? What are
9 fixed and operating Understand a
Costs .
The maximum load on 2500 kw capacity diesel plant
is 1600 kw. The load
Factor is 0.48.
Taking the following data find the cost of generation
is Rs. per kWh
Installation cost = Rs. 1800/ kw
Interest on capital = 15%
10 Maintenance cost = Rs.20,000/ year Evaluate e
Total labour and other consumables = Rs.85000 per
year.
Fuel Cost = Rs.7/ per kg
Lubricating oil cost = Rs. 0.8 / per kg
Fuel consumed = 0.25 kg / kWh
Oil consumed = 0.0025 kg / kWh [10]
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 112
Dept. of MECH
11.0 CAD/CAM (57024)
11.1COURSE DESCRIPTION FORM:
CAD/CAM
Course Title
57024
Course Code
R09-JNTUH
Regulation
Lectures Tutorials Practicals Credits
Course Structure
4 1 - 4
MS. GARIMA TRIPATHI Assistant Professor
Course Coordinator
Mr.B. SUBRAMANYAM Assistant Professor
Team of Instructors
COURSE OVERVIEW:
CAD/CAM subject is to study various aspects of computer aided design and computer
aided manufacturing. The students are able to understand various designs and purpose
them in the various fields of applications. The student would able to create part
programming using cnc software in this course. The student learns how to apply group
technology and to plan about material as per master schedule plan. This course provides
theoretical as well as practical basis for understanding the concepts of computer aided
design and computer aided manufacturing.
11.2PRE REQUISITES:
Level Credits Periods / Week Prerequisites
UG 4 5 AUTO CAD,PRO-E,CATIA
11.3MARKS DISTRIBUTIONS:
UNIVERSITY
Sessional Marks (25M) END EXAM Total
MARKS Marks
Mid Semester Test
There shall be two midterm examinations.
Each midterm examination consists of subjective type and
objective type tests.The subjective test is for 10 marks of
60 minutes duration.Subjective test of shall contain 4
questions; the student has to answer 2 questions, each
carrying 5 marks.The objective type test is for 10 marks of
20 minutes duration. It consists of 10 Multiple choice and 75
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 113
Dept. of MECH
10 objective type questions, the student has to answer all
the questions and each carries half mark.
First midterm examination shall be conducted for the first
two and half units of syllabus and second midterm
examination shall be conducted for the remaining portion.
Assignment 100
Five marks are earmarked for assignments.
There shall be two assignments in every theory course.
Marks shall be awarded considering the average of two
assignments in each course.
11.4 EVALUATION SCHEME:
S. No Component Duration Marks
1 I Mid Examination 80 minutes 20
2 I Assignment - 05
3 II Mid Examination 80 minutes 20
4 II Assignment - 05
MID Examination marks to be considered as average of above 2 MID’s
5 External Examination 3 hours 75
Total 100
COURSE OBJECTIVES:
1. To know the basic idea about the computers in industrial manufacturing
2. To know about computer aided graphics
3. To learn about geometric modeling , drafting and modeling systems
4. To learn about Nc,Group Technology and computer aided quality control
5. To know about Computer integrated manufacturing systems
11.5 COURSE OUTCOMES:
1. Have knowledge on geometric modeling
2. They know about the geometric constructions, models, curve representation methods,
surface representation methods
3. Have knowledge about numerical control, structure of CNC machine tools, manual
part programming methods, computer
aided part programming
4. Have knowledge on computer aided processes planning, production
flow analysis .
5. Have knowledge about Computer integrated manufacturing systems.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 114
Dept. of MECH
11.6 HOW PROGRAM OUTCOMES ARE ASSESSED:
Program Outcomes Level Proficiency
assessed by
An ability to apply the knowledge of mathematics, Computing,
Assignment
Science S
and engineering to solve Computer Science and Engineering
Exercise
problems.
(fundamental engineering analysis
A skills).
An ability to design and conduct engineering experiments, as
Solving
well as to H
B analyze and interpret data. (information retrieval skills). Practical
Example
An ability to design and construct a hardware and software
Building
C system, S
component, or process to meet desired needs, within realistic Prototypes with
constraints. (creative skills). Simulators
D Graduates will demonstrate an ability to visualize and work on H
laboratory and Multi-disciplinary tasks individually or as a
Mini or Micro
member
within the teams. (team work) Projects
E An ability to demonstrate skills to use the techniques, modern S Easy approach
engineering Tools, Software and equipments necessary to
for Complex
analyze
computer engineering Problems.(Engg. Problem solving Skills) Problem
An understanding of professional, social and ethical
--
F responsibility N
An ability to recognize the global issues like green initiatives
G and
alternate energy sources and to take technology to villages and
Mini Projects
to S
recognize the rural requirements. (Engg. Application Skills)
The broad education necessary to understand the impact of
Build
H engineering S
solutions in a global, economic, environmental, and societal
Prototypes
context.
Graduate will develop confidence for self education and
Seminars
acquire new S
knowledge in the computing discipline and ability and practice
Presentation,
for Multi-
I disciplinary tasks as a member within the teams Micro Projects
J To communicate effectively N
An ability to use the techniques, skills and modern engineering
Assigning
K tools S
necessary for Engineering Exercises,
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 115
Dept. of MECH
practice.
Development of
Prototypes,
Mini
Projects
L Graduates are able to participate and succeed in competitive H Higher Studies
examination like GRE, GATE, TOEFL, GMAT etc.(Continuing
Education )
The use of current application software and the design and use
Major Project
M of H
operating systems and the analysis, design, testing and
documentation
of computer programs for the use in Computer Science and
engineering
technologies.
N An ability to setup an enterprise.(Employment Skills) S Placement
N = None S = Supportive H = Highly Related
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 116
Dept. of MECH
11.7 JNTUH SYLLABUS:
UNIT-I
Computers in industrial manufacturing, Product cycle, CAD/CAM hardware, Basic
structure, CPU, Memory types, input devices, display devices, hard copy Devices,
Storage devices
UNIT-II
Computer graphics: Raster scan graphics coordinate system, database structure for
graphics modeling, Transformation of geometry, 3D transformations, mathematics of
projections, clipping, hidden surface removal
UNIT - III
Geometric Modeling: Requirements, geometric models, geometric construction models,
curve representation methods, surface representation methods, modeling facilities
desired.
UNIT – VI
Drafting and modeling systems: basic geometric commands, layers, display control
commands, editing, dimensioning, solid modeling.
UNIT-V
Numerical Control: Nc, Nc modes, Nc elements, Nc machine tools, structure of CNC
machine tools, Features of machining Center, turning center, CNC part programming:
fundamentals, manual part programming methods, computer aided part programming.
UNIT-VI
Group Tech: Part families, coding and classification, Production flow analysis,
Advantages and limitations, Computer aided process planning, retrieval type and
Generative type.
UNIT-VII
Computer aided quality control: Terminology in quality control .the computer in QC,
Contact inspection method, Non contact inspection methods-optical, Non contact
inspection methods-Non optical, computer aided testing, Integration of CAQC with
CAD/CAM.
UNIT – VIII
Computer integrated Manufacturing systems: Types of manufacturing system,
Machine tools and related equipment, material handling system, computer control
systems , human labor in the manufacturing system, CIMS benefits.
TEXT BOOK:
T1. CAD/CAM A Zimmers and P . Groover / PE/ PHI
T2. CAD / CAM Theory and Practice / Ibrahim Zeid / TMH
T3. INTRODUCTION TO CAD/CAM: P.N.RAO
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 117
Dept. of MECH
REFERENCES:
R1. Automation, Production Systems and Computer Integrated Manufacturing / Groover
/P.E
R2. CAD/CAM/CIM/ Radhakrishnan and Subramanian/ New Age
R3. Principles of computer aided design and manufacturing/Farid Amirouche/pearson
R4. CAD/CAM: concepts and applications/ Alavala/PHI
R5. Computer numerical control concepts and
programming/Warren S Seames/ Thomson
11.8 COURSE PLAN:
At the end of the course, the students are able to achieve the following Course Learning
Outcomes.
Lecture No. Course Learning Outcomes Topics to be covered Refers
1 Define CAD/CAM Introduction to CAD/CAM T3
Explain the Role of Computers Role of Computers in industrial
2 T3
in industrial Manufacturing Manufacturing
3 Explain Product cycle Product cycle T3
Discuss about CAD/CAM CAD/CAM Hardware
4 T3
Hardware
Explain about Basic structure of Basic structure of CAD/CAM
5 T3
CAD/CAM Hardware Hardware
Explain about CPU, Memory CPU, Memory Types
6 T3
Types
7 Explain about Input Devices Input Devices T3
Explain about Hard copy Hard copy devices, Storage devices
8 T3
devices, Storage devices
Explain Raster Scan graphics Raster Scan graphics
9 T3
Coordinates system coordinates system
Explain Data Base structure for Data Base structure for
10 T3
graphics modeling graphics modeling
Discuss about Transformation of
11 T3
geometry Transformation of geometry
Discuss about 3D
12 T3
transformations 3D transformations
Discuss about Mathematics
13 T3
of Projections Mathematics of Projections
14 Discuss Clipping Clipping T3
15 Explain Hidden surface removal Hidden surface removal T3
Explain the Requirements of Requirements of Geometric
16 T3
Geometric Modeling Modeling
17 Explain the Geometric models Geometric models T3
Explain the Geometric Geometric construction
18 T3
construction models models
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 118
Dept. of MECH
Explain various methods of Curve representation
19 T3
Curve representation
Explain various methods of Surface representation methods
20 T3
Surface representation methods
Explain Modeling facilities Modeling facilities desired
21 T3
desired
Explain Basic geometric Basic geometric commands
22 T3
commands
23 Explain different types of Layers Layers T3
24 Explain Display control commandsDisplay control commands T3
25 Discuss about Editing Editing T3
26 Discuss about Dimensioning Dimensioning T3
27 Explain Solid modeling Solid modeling T3
28 Define Nc Nc T3
29 Explain various types of Nc modes Nc modes T3
30 Discuss about Nc elements Nc elements T3
Explain various types of Nc Nc machine tools
31 T3
machine tools
Briefly explain the Structure of Structure of CNC machine tools
32 T3
Structure of CNC machine tools
Explain the Features of Features of machining Center
33 T3
machining Center
34 Discuss about Turning center Turning center T3
Explain about CNC part CNC part programming:
35 T3
programming: fundamentals fundamentals
Briefly explain the Manual part Manual part programming
36 T3
programming methods methods
Discuss about Computer aided Computer aided part
37 T3
part programming programming
38 Define Part family Part family T3
Discuss about Coding and Coding and classification
39 T3
classification
Explain the Production flow Production flow analysis
40 T3
analysis
Write the Advantages and Advantages and limitations of the
41 limitations of the Production Production flow analysis T3
flow analysis
Define Computer aided process Computer aided process planning
42 T3
planning
Distinguish between Retrieval Retrieval type , Generative type
43 type , Generative type CAPP CAPP System T3
System
Explain the Terminology in Terminology in quality control
44 T3
quality control
45 Briefly explain the computer in Computer in QC T3
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 119
Dept. of MECH
QC
Discuss about Contact Contact inspection method
46 T3
inspection method
Discuss about Non contact Non contact inspection methods-
47 T3
inspection methods-optical optical
Explain the Non contact Non contact inspection methods-
48 T3
inspection methods-Non optical Non optical
49 Define Computer aided testing Computer aided testing T3
Discuss about Integration of Integration of CAQC with
50 T3
CAQC with CAD/CAM CAD/CAM
Briefly explain the Types of Types of manufacturing system
51 T3
manufacturing system
Explain Machine tools and Machine tools and related
52 T3
related equipment equipment
Discuss about Material handling Material handling system
53 T3
system
Discuss about Computer Computer control systems
54 T3
control systems
Explain Human labor in the Human labor in the manufacturing
55 T3
manufacturing system system
56 Discuss CIMS benefits CIMS benefits T3
11.9 MAPPING COURSE OBJECTIVES LEADING TO THE ACHIEVEMENT
OF PROGRAM OUTCOMES:
Program Outcomes
a b c d e f g h i j k l m
I H S
II H
III H S
IV H S
V S S
S= Supportive H= Highly Related
11.10 MAPPING COURSE OUTCOMES LEADING TO THE ACHIEVEMENT
OF PROGRAM OUTCOMES:
Program Outcomes
a b c d e f g h i j k l m
1 H H
2 H S H
3 H S H
4 S H
5 H H
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 120
Dept. of MECH
S= Supportive H= Highly Related
11.11 OBJECTIVE QUESTIONS:
UNIT-I
1. CAD as _____ [B]
a)Computer aided drafting
b)Computer aided design
c)Computer aided manufacturing
d)None
2. CAM as ______ [A]
a)Computer aided manufacturing
b)Computer aided design
c)(a) and (b)
d)None
3. The CAD hardware includes [D]
a)Computer
b)One (or) more graphical display terminals
c)Key boards
d) All of the above
4. CRT screen is [ A]
a)Phosphor-Coated glass screen
b)Silver-coated glass screen
c)Pixel
d)All the above
5. Identify the correct sequence of the design process (NOV 2011 JNTU)
A) Recognition of need→ definition of problem →synthesis →analysis and optimization
→evaluation →presentation
B) Recognition of need→ definition of problem → analysis and
optimizatization→synthesis→ evaluation→ presentation
C) Recognition of need→ definition of problem → synthesis → analysis and
optimization→ presentation→ evaluation
D) Recognition of need→ definition of problem→ analysis and optimization→
synthesis→presentation [A]
6. Selective erasing is not possible in [B]
A) Directed –beam refresh
B)DVST
C)Raster scan
D)None of the above
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 121
Dept. of MECH
7. Air crafts are manufactured by [ C]
a) Mass production
b) batch production
c) job shop production
d) continuous flow production
8. Which of the following is not considered as a method of input control in a CAD system
[D]
a) Programmable function box
b) joystick.
c) Touch terminal
d) plotter
9. The lowest form of computer language is called [C]
A) BASIC
B) FORTRAN
C) Machine language
D) COBOL
10. C2 continuity refers to [C]
A) Common tangent
B) Common point
C) Common curvature
D)common norm a l
11.Selective erasing is not possible in [B]
A) Directed –beam refresh
B) DVST
C) Raster scan
D) None of the above
12. Following database is used in cad/cam system. [A]
A) Object orientated database
B) Relational database
13. Following database is used in cad/cam system. [A]
A) Object orientated database
B) Relational database
C) Network database
D) Hierarchical database
14.Partial erasing of the image is not possible in [C ]
A) Direct beam refresh
B) raster scan
C) DVST
D) all of the above
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 122
Dept. of MECH
15. Ambiguous representation of real objects is seen in [B]
a) Surface model
b) wire frame model
c) Solid model
d) product model
16. In cad system, with respect to cad image, the ratio of image width to height is known
as___Aspect Ratio_ (SEP 2010 JNTU)
17. Individual transformations are combined in order to achieve the required results is
called
__________CONCATENATION_______ (SEP 2010 JNTU)
18. The technique of selecting and enlarging portions of a drawing is called
_WINDOWING
19. Programming automation is suitable for__BATCH_ type of production. (SEP 2010
JNTU)
20. Light pen works on the principle of _LIGHT_ rather than ink. (SEP 2010 JNTU)
UNIT-II
1. DDA Algorithm means [A]
a) digital differential analyzer b) digital differential analog
c) digital differential algorithm d) digital deformation analyzer
2. For defining geometry of the parts the -------------- coordinate system is used [B]
a) Left hand Cartesian b) Right hand Cartesian
c) Polard) spherical
3. WCS means [A]
a) World coordinate system b) word coordinate system
c) World convert system d) word converts system
4. UCS means [A]
a) Universal coordinate system b) union coordinate system
c) United coordinate System d) universal convert system
5. The display screen is --------------- dimensional. [B]
a) One b) two
c) three d) four
6. Bresenham algorithm is used for drawing. [C]
a) Arc b) circle
c) line d) ellipse
7. the most common views for representing a component are- Translation, Scaling,
Reflection
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 123
Dept. of MECH
8. Translation is normally the operation used in the CAD systems as -MOVE--
command.
9. Scaling is normally the operation used in the CAD systems as -ZOOM----command
10. Reflection is normally the operation used in the CAD systems as MIRROR
command
11.The heart of the computer is? [A]
A. CPU B. ALU
C. Monitor D. Key board
12.Raster CRT eliminates……..? [A]
A. Flicker and slow update B. Flicker displays
C. Slow update only D. Has no effect
13.After creating a CAD model, we often need a hard copy using? [A]
A. Output device B. Input device
C. CAM D. FEM
14.Manufacturing software is usually called………? [B]
A. CAD B. CAM
C. CAPP D. CADD
15. Which of the following is not an analytical entity? [A]
A. Line B. Circle
C. Spine D. Parabola
16. The measurement, properties, and relationships of the lines and Point’s of an object
that make up
it’s………..? [B]
A. Geometry B. Shape
C. System D. Layout
17. Technique, which enables the designer to mould and shape, rather than construct an
object using a
series of line is……….? [A]
A. Solid modeling B. Surface modeling
C. Wire frame modeling D. FEM
18. Rapid prototyping is used to generate the product directly from the ---------? [A]
A. 3D CAD model B. 2D CAD model
C. 1D CAD system D. None of these
19. Display of a volume model that shows all of its edges is called a………..? [A]
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 124
Dept. of MECH
A. 3D model B. Surface modeling
C. Wireframe D. Solid model
20. The degree of the Bezier curve with n control points is [A]
A. n+1 B. n-1
C. n D. 2n
UNIT-III
1. The degree of Bezier curve with n control points is [B]
A) n+1 B) n-1
C) n D) 2n
2. The convex hull property is satisfied by the following surface [D]
A) Bezier B) B-spline
C) NURBS D) All the above
3. The basic geometric building blocks in a cad/ cam package are [D]
A) Lines B) Points C) circles D) all of them
4. ADAMS, Expert system s, & artificial intelligence are part of [A]
A) Computer aided analysis B) Computer aided visualization
C) Computer aided synthesis D) CIM
5. Identify the correct sequence of the design process
[A]
A) Recognition of need→ definition of problem →synthesis →analysis and optimization
→evaluation →presentation
B) Recognition of need → definition of problem → analysis and optim ization
→synthesis → evaluation → presentation
C) Recognition of need→ definition of problem → synthesis → analysis and
optimization → Presentation→ evaluation
D) Recognition of need→ definition of problem→ analysis and optim ization →
synthesis→presentation
6. The following geometric modelling usually do not support CAM or NC [A]
A) 2D B) 3D C) 1D D) None
7. The following represents 3D geometric modelling. [D]
A) Wireframe modling B) solid modeling
C) surface modeling D) all the above
8. The final stage in the implementation of CAD system is [B]
A) Geometric modeling B) documentation
C) design changes D) drafting and detailing
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 125
Dept. of MECH
9. The degree 0f the Bezier curve with n control points is [A]
A) n+1 B)n-1
C)n D)2n
10. The measurement properties and relationships of the lines and points of an object
that make up its [B]
A) Geometry B) shape
C) system D) layout
11. Coons surface or patch is obtained by blending ----------- boundary curves [C]
A) 2 B) 5
C)4 D) all the above
12. The convex hull property is satisfied by the following surface [D]
A)Bezier B) B-spline
C) NURBS D) all the above
13. After creating a CAD model we often need a hard copy using [A]
A) Output device B) input device
C) CAM D) FEM
14. Which of the following is not an analytical entity [C]
A) Line B) circle
C) spline D) parabola
15. Adisplay of a volume model that shows all of its edges is called a [C]
A) 3D model B) surface modeling
C) wireframe model D) solid model
16. Keyboard is a graphical, text and numerical input device.
17. Locating devices are classified as graphics input devices.
18. Mouse is a locating type of input device
19. Thumbwheels are usually mounted on Monitor
20. The screen is scanned from left to right, top to bottom all the time to generate
graphics by raster scans
UNIT- IV
1. You can create the circle in the following ways [D]
A) center and radius B) two point defining diameter
C) tangent and radius D) all the above
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 126
Dept. of MECH
2. Move command can move the objects [C]
A) By changing their orientation & size
B) by changing their orientation but without changing size
C) without changing their orientation or size
D) None of the above
3. Computer will perform the data processing functions in [C]
A)NC B) CNC C) DNC D) ACS
4. The measurement properties and relationships of the lines and points of an object
that make up its [B]
A) Geometry B) shape C) system D) layout
5. Partial erasing of the image is not possible [C]
A) Direct beam refresh B) raster scan
C) DVST D) all the above
6. Selective erasing is not possible in [B]
A) Direct beam refresh B) DVST
C) raster scan D) all the above
7. ‘BLU’ stands for [A]
A) Basic length unit B) British unit length
C) base unit length D) None of the above
8. In computer aided drafting practice an arc is defined by [D]
A) Two end points only B) center and radius
C) radius and one end point D) two end points and center
9. Stiffness is -------to the length of the element [D]
A) Inversely proportional B) directly proportional
C) exponential D) independent
10. CAD software is primarily used in [A]
A) Engineering B) software development
C) desktop publishing D) accounting
11. The toolbar at the top of the AutoCAD 2008 window is: [C]
A)The Draw toolbar B) The Modify toolbar
C) The Standard toolbar D) The Properties toolbar
12. The Design Center palette can be opened from the: [D]
A)Layer toolbar B) Properties toolbar
C) Modify toolbar D) Standard toolbar
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 127
Dept. of MECH
13. Press the F9 key of the keyboard for: [B]
A)Grid on/off (b) Snap on/off (c) Ortho on/off (d) Osnap on/off
14. To call the Line tool from the command line, the following abbreviation can be
entered: [C]
a)line (b)li (c)l (d)ln
15. When the F6 key of the keyboard is pressed, the following facility is toggled
on/off: [C]
(a)Snap
(b) Ortho
(c) DUCS (d) DYN
16. The key F9 toggles on/off: [A]
(a)Snap (b) Ortho (c) Grid (d) DYN
17. The command line abbreviation for the Circle tool is: [B]
(A) Cir (b) c (c)ci (d)cl
18. array command makes multiple copies of selected objects in a rectangular or circular
(polar) pattern.
19. Segmentation is a process of splitting a curve or a surface into a number of parts such
that the composite curve or surface.
20. Euler operators are used for building boundary models for complex objects.
UNIT-V
1. Numerical control can be applied to [D]
(A) Milling machines (B) Drilling & boring machines
(C) Grinding & sewing machines (D) All the above
2. The advantage of CNC is [D]
(A) Flexibility (B) Metric conversion (C) Tape editing at the machine site (D) All the
above
3. Direct numerical control machines do not use [C]
(A) CPU (B) Software (C) Punched tapes (D) All the above
4. Contouring motion commands are used to specify the continuous path motion
involving -------------- and ------- operations [A]
(A) Milling &turning (B) Milling & drilling (C) Both A and B (D) none of these
5. In MICLASS System 11th& 12th codes are-------------- [C]
(A) Main shape (B) Main dimension (C) Material codes (D) Shape elements
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 128
Dept. of MECH
6. Advantage of numerical control in machines is [D]
(A) Reduces non Productive time (B)Reducesfixturing
(C) Improved quality control (D) All the above
7. Dwell is defined by [A]
(A)G04 (B) G03 (C) G02 (D) G01
8. APT is used [B]
(A) In teaching of the beginners (B) In CAM for NC machine tools
(C) In inventory management (D) none of the above
9. Machinability data base system makes use of [D]
(A)Tool life (B) Material life (C) Machine life (D) Any of the above
10. Manufacturing software is usually called [B]
(A) CAD (B) CAM (C) CAPP (D) CADD
11. CNC machines are also known as_Soft wired___
12. Linear interpolation is carried out by G01
13. M03 code is used for SPINDLE SPEED ON CLOCKWISE
14. Which is the last statement in APT program END
15. The main objective of DNC system is to eliminate the use of PUNCHED TAPE
16. The NC modes are broadly classified into point-to-point, straight cut mode and
contouring cut mode categories.
17. The cutting speed in milling V= 𝝅dn/1000
18. The notation of character M stands to _Miscellaneous function
19. Which code prefers to circular interpolation when anti-clockwise G03
20. APC stands for _Automatic Pallet Changer
UNIT-VI
1. In group technology a part family is a collection of parts based on [D]
(A) Shape (B) Size
(C) Similar processing steps (D) Any of the above
2. The implementation of GT can be done by [C]
(A) Visual inspection (B) production flow analysis
(C) Parts classification and coding (D)All the above
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 129
Dept. of MECH
3 From the following which is not familiar with GT [D]
(A) Optiz system (B) MICLASS system(C) CODE system (D) Machining system
4. Machinability data base system makes use of [D]
(A) Tool life (B) Material life(C) Machine life (D) Any of the above
5. APT is used [B]
(A) In teaching of the beginners (B) In CAM for NC machine tools
(C) In inventory management(D) None of the above
6. Tolerance codes consist of how many digits [C]
(A) 7 & 8 digits (B) 8 & 9 digits(C) 9 & 10 digits (D) 11 & 12 digits
7. Machine vision is an example of ------ [B]
(A) Contact inspection (B) Online inspection (C) Offline inspection (D) None of the
above
8. ----- % of the time is required on a CMM compared to tradition inspection method [A]
(A) 5-10 % (B) 8-15% (C) 10-12% (D) 1-5%
9. The measurement, properties and relationships of the lines and points of an object that
make up its [B]
(A) Geometry (B) Shape (C) System (D) Layout
10. Lean manufacturing is the systematic elimination of [B]
(A) Labour (B) Waste (C) Management role (D) Inventory
11. Which character will use to assigned the work [D]
A) G95 B) G96 C) G97 D) G98
12. ____is philosophy which can be used to group parts based on similarities in design
process [A]
A) GT B) FMS C) CAD D) CAM
11. In group technology a part family is a collection of parts based on [D]
(A) Shape (B)Size (C)Similar processing steps (D) Any of the above
12. The implementation of GT can be done by [C]
(A) Visual inspection(B) production flow analysis (C) Parts classification and
coding(D)All the above
13 From the following which is not familiar with GT [D]
(A) Optiz system (B) MICLASS system(C) CODE system (D) Machining system
14. Machinability data base system makes use of [D]
(A) Tool life (B) Material life(C) Machine life (D) Any of the above
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 130
Dept. of MECH
15. APT is used [B]
(A) In teaching of the beginners (B) In CAM for NC machine tools
(C) In inventory management (D) none of the above
16. Tolerance codes consist of how many digits [C]
(A) 7 & 8 digits (B) 8 & 9 digits
(C) 9 & 10 digits (D) 11 & 12 digits
17. Machine vision is an example of ------ [B]
(A) Contact inspection (B) Online inspection
(C) Offline inspection (D) None of the above
18. ----- % of the time is required on a CMM compared to tradition inspection method [A]
(A) 5-10 % (B) 8-15% (C) 10-12% (D) 1-5%
19. The measurement, properties and relationships of the lines and points of an object that
make up its [B]
(A) Geometry (B) Shape (C) System (D) Layout
20. Lean manufacturing is the systematic elimination of [B]
(A) Labour (B) Waste (C) Management role (D) Inventory
UNIT-VII
1 Machine vision is an example of . [B]
(A) Contact inspection (B) Online inspection (C) Offline inspection (D) None of the
above
2. Flexible inspection system involves more than -------- inspection [A]
(A) 1 (B) 2 (C) 5 (D) 3
3. The mechanized work transport system to form an automated production line is called [A]
(A)Transfer machine (B) Functional elements
(C) Transfer automation (D) None of the above
4. Transfer lines are used for [B]
(A) Large variety of parts (B) Small variety of parts
(C) Medium variety of parts (D) None of the above
5. The greatest change as a result of CADS / CAM is taking place in [C]
(A) Aerospace industry (B) Medium industry
(C) Electronic industry (D) Cartography industry
6. ADAMS, expert systems & artificial intelligence are part of [A]
(A) Computer aided analysis (B) Computer aided Visualization
(C) Computer aided synthesis (D) CIM
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 131
Dept. of MECH
7. CAD software is primarily used in [A]
(A) Engineering (B) Software development
(C) Desktop publishing (D) Accounting
8. CMM stands for [A]
(A) Coordinated measuring machine (B) Computerized measuring machine
(C) Compact measuring machine (D) Complex measuring machine
9. CAD stands for [D]
(A) Computer assisted design (B) Computer application design
(C) Computer application and design(D) Computer aided design
10. CAM stands for [C]
(A) Computer assisted manufacturing (B) Computer application and manifestation
(C) Computer aided manufacturing (D) Computer application and marketing
(11)CAD/CAM is the relationship between [B]
(a) Science and engineering (b) design and manufacturing
(c)manufacturing and marketing (d)design and marketing
(12) Best quality graphics is produced by [B]
(a) Line printers (b) plotters
(c) Daisy wheel printers (d) dot-matrix printers
13. In Optiz code, the from consists of_DIGITS 9
14. The alternative approaches to CAPP have been developed _Retrival and
generative_systems
15. Coding system will implements for selecting the part family in the group technology.
16.MRP input requires Master production schedule,bill-of-materials and inventory
record..
17. Euler operators are used for building boundary models for complex objects.
18. A __TOOL MAGAZINE__where sufficient number of tools can be stored.
19. Horizontal axis Machining Center is used for heavier work pieces with large metal
removal rates.
20. Expand CAQC COMPUTER AIDED QUALITY CONTROL
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 132
Dept. of MECH
UNIT-VIII
1. CIM consists of the components [A]
(A) CAD & CAM (B) Business functions (C) Both A & B (D) None of the above
2. Benefits of CIM [D]
(A) Greater accuracy of the drawing (B) Superior design standards
(C) Cost estimating (D) All the above
3. ------------% of the time is required on a CMM compare to traditional inspection
method [A]
(A) 5-10% (B) 8-15% (C) 10-12% (D) 1-5%
4. APT is used [B]
(A) In teaching of the beginners (B) In CAM for NC machine tools
(C) In inventory management (D) None of the above
5. Machinability data base system makes use of [D]
(A) Tool life (B) Material life (C) Machine life (D) Any of the above
6. Manufacturing software is usually called [B]
(A) CAD (B) CAM (C) CAPP (D) CADD
7. Tolerance codes consist of how many digits [C]
(A) 7 & 8 digits (B) 8 & 9 digits (C) 9 & 10 digits (D) 11 & 12 digits
8. The mechanized work transport systems to form an automated production line is
called [A]
(A) Transfer machine (B) Functional element
(C) Transfer automation (D) None of the above
9. Transfer lines are used for [B]
(A) Large variety of parts (B) Small variety of parts
(C) Medium variety of parts (D) None of the above
10. CIM technology which implemented to thrives many advantages such as [D]
(A) Reduces design cost by 20% (B) Reduces time by 50%
(C) Improves product quality (D) All are these
11.CAD and CAM are related through [D]
(a)NC tapes (b)automation tools (c)parts production and testing (d)common data base
(12) Top down design does not require [B]
(a) Step wise refinement (b)loop invariants (c)flow charting (d)modularity
(13) Data structures include [A]
(a) Arrays (b) exception statements (c) Iteration (d) both (b) and (c)
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 133
Dept. of MECH
(14) An example of an expert system is [A]
(a) A medical diagnosis program (b) finite element analysis program
(c) Stress analysis program (d) structural analysis program
(15) An expert system [C]
(a) Simulates the reasoning of a human expert in a particular subject
(b)is an application of artificial intelligence research (C) both (a) and (b) (d)none of the
above
(16) Artificial intelligence is the main characteristics of [D]
(a) Second generation computer (b)third generation computer
(c) Fourth generation computer (d)fifth generation computer
17) Two major processing languages for artificial intelligence are [C]
(a)COBOL and LISP (b) COBOL and FORTAN
(c)LISP and PROGLOG (d) PROGLOGT and BASIC
(18)DBMS stands for [B]
(a) Data base marketing system (b) data base management system
(c) Data base management studies (d) database marketing strategies
(19) A collection of logically related data elements that can be used for multiple
processing needs is called [B]
(a) Workstation (b) data base (c) file (d) register
(20) Integration of CAD and CAM is known as [A]
(a)CIM (b) CAE (c) FMS (d) CAPP
11. 12 TUTORIAL QUESTIONS:
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-I
Short Answer Questions
1 Define CAD? Knowledge a
2 Define CAM? Knowledge b
3 Discuss hardware? Analysis e
4 Define CPU? comprehension c
5 Explain memory? comprehension a
6 Define input devices Knowledge a
7 Define hard copy Devices Knowledge a
8 Discuss display devices Analysis a
9 Define Storage devices Analysis a
10 Define Product cycle Knowledge b
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 134
Dept. of MECH
Blooms
Course
l.No. Questions Taxonomy
Outcome
Level
UNIT-I
Tutorials
Long Answer Questions
1 What is various output Devices? Explain in detail? Knowledge a
What is the basic structure of CAD/CAM? Explain about
2 Knowledge a
various storage devices?
3 What is product life cycle? Explain in detail? Analysis a
Explain about role of computers in industrial
4 comprehension b
manufacturing?
5 What are various memory types? comprehension a
6 Briefly discuss about basic hardware structure of CPU. Knowledge b
7 Write about input devices with neat sketch Knowledge e
8 Discuss hard copy Devices with neat sketch Analysis c
9 Write about Storage devices with neat sketch Analysis a
10 Write the application of Product cycle Knowledge a
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-II
Tutorials
Short Answer Questions
1 Define coordinate system Knowledge a
2 Define Raster scan Knowledge b
3 Discuss database Analysis e
4 Explain graphics modeling comprehension c
5 Explain Transformation comprehension a
6 Define projections Knowledge a
7 Define clipping Knowledge a
8 Discuss clipping Analysis a
9 Discuss clipping Analysis a
10 Define hidden surface removal Knowledge b
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 135
Dept. of MECH
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-II
Tutorials
Long Answer Questions
1 What is coordinate system explain it? Analysis b
Explain about the Raster scan graphics coordinate
2 comprehension a
system?
3 Explain database structure with a neat sketch? comprehension b
4 Explain graphics modeling Analysis e
5 Write about the Transformation of geometry Knowledge b
6 Discuss about projections comprehension b
7 Explain about clipping Analysis a
8 Briefly explain about the 2D-clipping Knowledge b
9 Briefly explain about the 3D-clipping Knowledge e
10 Briefly explain about the hidden surface removal Knowledge b
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-III
Tutorials
Short Answer Questions
1 Define geometric models Knowledge b
2 Define geometric construction models Knowledge e
3 Discuss curve representation methods Analysis b
4 Explain surface representation methods comprehension a
5 Explain modeling facilities desired comprehension b
6 Define Bezier curve Knowledge e
7 Define B-spline curve Knowledge b
8 Discuss Bezier surface Analysis e
9 Discuss cubic curve Analysis b
10 Define curve Knowledge a
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 136
Dept. of MECH
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-III
Tutorials
Long Answer Questions
1 What is geometric models Analysis b
Explain about the various geometric construction
2 comprehension a
models
3 Explain curve representation methods comprehension b
4 Explain surface representation methods Analysis e
5 Write about the modeling facilities desired Knowledge b
6 Discuss about Bezier curve with a neat sketch comprehension b
7 Explain about B-spline curve with a neat sketch Analysis a
8 Briefly explain about the Bezier surface Knowledge b
9 Briefly explain about the cubic curve Knowledge e
10 Briefly explain about the geometric modeling Knowledge b
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-IV
Tutorials
Short Answer Questions
1 Define geometric commands Knowledge b
2 Define layers Knowledge e
3 Discuss display control commands Analysis b
4 Explain drafting commands comprehension a
5 Explain modify commands comprehension b
6 Define dimensioning Knowledge b
7 Define editing Knowledge b
8 Discuss trim command Analysis e
9 Discuss array command Analysis b
10 Define solid modeling Knowledge a
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 137
Dept. of MECH
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-IV
Tutorials
Long Answer Questions
1 What is geometric commands Analysis b
2 Explain about the layers comprehension a
3 Explain display control commands comprehension b
4 Explain editing Analysis e
5 Write about the dimensioning Knowledge b
6 Discuss about solid modeling comprehension b
7 Explain about polar array and rectangular array Analysis a
8 Briefly explain about the erase and cut Knowledge b
9 Briefly explain about the move and copy Knowledge e
10 Briefly explain about the rotate Knowledge b
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-V
Tutorials
Short Answer Questions
1 Define Nc Knowledge b
2 Define Nc modes Knowledge e
3 Discuss structure of CNC machine tools Analysis b
4 Explain CNC part programming comprehension a
5 Explain , computer aided part programming comprehension b
6 Define Nc machine tools Knowledge b
7 Define Nc elements Knowledge b
8 Discuss Features of machining Center Analysis e
9 Discuss , manual part programming methods Analysis b
10 Define turning center Knowledge a
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 138
Dept. of MECH
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-V
Tutorials
Long Answer Questions
1 What is Nc modes Analysis b
2 Explain about the turning center comprehension a
3 Explain Nc elements comprehension b
4 Explain structure of CNC machine tools Analysis e
5 Write about the Features of machining Center Knowledge b
6 Discuss about Nc comprehension b
7 Explain about Nc machine tools Analysis a
8 Briefly explain about the CNC part programming Knowledge b
Briefly explain about the manual part programming
9 Knowledge e
methods
Briefly explain about the computer aided part
10 Knowledge b
programming
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-VI
Tutorials
Short Answer Questions
1 Define Part families Knowledge b
2 Define coding Knowledge e
3 Discuss Generative type CAPP System Analysis b
4 Explain Advantages of GT comprehension a
5 Explain limitations of GT comprehension b
6 Define coding and classification Knowledge b
7 Define Production flow analysis Knowledge b
8 Discuss process planning Analysis e
9 Discuss Production flow analysis Analysis b
10 Define CAPP Knowledge a
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 139
Dept. of MECH
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-VI
Tutorials
Long Answer Questions
1 What is Part families Analysis b
2 Explain about the GT comprehension a
3 Explain Production flow analysis comprehension b
4 Explain Computer aided process planning Analysis e
5 Briefly explain about the applications of GT Knowledge b
6 Discuss about coding comprehension b
7 Explain about coding and classification Analysis a
8 Write about the CAPP System Knowledge b
Briefly explain about the Generative type CAPP
System
9 Knowledge e
Briefly explain about the retrieval type CAPP
10 Knowledge b
System
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-VII
Tutorials
Short Answer Questions
1 Define QC Knowledge b
2 Define Terminology in quality control Knowledge e
3 Discuss the computer in QC Analysis b
4 Explain Non contact inspection methods-optical comprehension a
5 Explain Integration of CAQC with CAD/CAM comprehension b
6 Define Contact inspection method Knowledge b
7 Define Non contact inspection methods-Non optical Knowledge b
8 Discuss applications of CAQC Analysis e
9 Discuss applications of QC Analysis b
10 Define computer aided testing Knowledge a
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 140
Dept. of MECH
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-VII
Tutorials
Long Answer Questions
1 What is computer aided testing Analysis b
2 Explain about the the computer in QC comprehension a
3 Explain Non contact inspection methods-Non optical comprehension b
4 Explain the applications of CAQC Analysis e
5 Write about the Terminology in quality control Knowledge b
6 Discuss about QC comprehension b
7 Explain about Contact inspection method Analysis a
Briefly explain about the Non contact inspection
8 Knowledge b
methods-optical
Briefly explain about the Integration of CAQC with
9 Knowledge e
CAD/CAM
10 Briefly explain about the applications of QC Knowledge b
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-VIII
Tutorials
Short Answer Questions
1 Define manufacturing system Knowledge b
2 Define Machine tools Knowledge e
3 Discuss Machine tools and related equipment Analysis b
4 Explain material handling system comprehension a
5 Explain human labor in the manufacturing system comprehension b
6 Define computer control systems Knowledge b
7 Define human labor Knowledge b
8 Discuss applications of CIM Systems Analysis e
9 Discuss applications of material handling system Analysis b
10 Define CIM Knowledge a
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 141
Dept. of MECH
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-VIII
Tutorials
Long Answer Questions
1 What is manufacturing system Analysis b
2 Explain about the Machine tools comprehension a
3 Explain Machine tools and related equipment comprehension b
4 Explain material handling system Analysis e
5 Write about the computer control systems Knowledge b
6 Discuss about human labor comprehension b
7 Explain about CIM Analysis a
Briefly explain about the human labor in the
8 Knowledge b
manufacturing system
9 Briefly explain about the CIMS benefits Knowledge e
10 Briefly explain about the material handling system Knowledge b
11. 13 ASSIGNMENT QUESTIONS:
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-I
Assignments
Short Answer Questions
1 Define CAD? Knowledge a
What is meant by product life cycle? Briefly describe
2 Knowledge b
with a neat sketch?
3 Discuss hardware? Analysis e
4 Define CPU? comprehension c
Briefly describe the types of storage devices used in
5 computers? comprehension a
6 What are the advantages of CAD and CAM? Knowledge a
Describe about the working principles of Raster
7 Knowledge a
Display
What is the basic structure of CAD/CAM? Explain
8 Analysis a
about various storage devices?
9 Define Storage devices Analysis a
10 Define Product cycle Knowledge b
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 142
Dept. of MECH
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-I
Assignments
Long Answer Questions
1 What is CAD and CAM? Knowledge a
What is the basic structure of CAD/CAM? Explain about
2 Knowledge a
various storage devices?
3 What is product life cycle? Explain in detail? Analysis a
Explain about role of computers in industrial
4 comprehension b
manufacturing?
5 Briefly describe the inkjet printer comprehension a
6 Briefly discuss about basic hardware structure of CPU. Knowledge b
7 Describe about the working principles of Refresh display Knowledge e
8 Briefly describe the floppy disk device used in computers Analysis c
9 Write about Storage devices with neat sketch Analysis a
10 Write the application of Product cycle Knowledge a
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-II
Assignments
Short Answer Questions
1 Explain the basic principle of the DDA? Knowledge a
2 Define Raster scan Knowledge b
3 Explain the database structures used in graphics modeling. Analysis e
4 Explain graphics modeling comprehension c
Explain the basic principle of Bresenham's algorithms for
5 comprehension a
the linear interpolation for graphics terminals.
6 Define projections Knowledge a
7 Define clipping Knowledge a
Discuss about reflection transformation. Explain reflection
8 Analysis a
through a plane, line and a point.
9 Discuss clipping Analysis a
10 Define hidden surface removal Knowledge b
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 143
Dept. of MECH
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-II
Assignments
Long Answer Questions
A triangle lamina has corners P,Q,R the coordinates
of the points are (20,20), (40,25), (30,40)
respectively. The lamina is rotated about P through
1 Analysis b
3000 in clock wise direction. Obtain the
transformation matrix and calculate the new
coordinates of the triangle.
Explain about the Raster scan graphics coordinate
2 comprehension a
system?
3 Explain database structure with a neat sketch? comprehension b
Briefly explain the various graphic
transformations required for manipulating the
4 Analysis e
geometric information?
5 Write about the Transformation of geometry Knowledge b
6 Explain the method of back face removal. comprehension b
7 Explain about clipping Analysis a
8 Briefly explain about the 2D-clipping Knowledge b
Briefly explain about the 3D-clipping E
9 Knowledge
Blooms
Sl.No Course
Questions Taxonomy
. Outcome
Level
UNIT-III
Assignments
Short Answer Questions
1 Define geometric models Knowledge b
2 What are various geometric construction methods? Knowledge e
Compare various measures of continuity of curves
3 Analysis b
and surfaces.
4 Explain surface representation methods comprehension a
5 Explain modeling facilities desired comprehension b
Give a classification of the different surfaces that can
6 Knowledge e
be used in geometric modeling applications?
7 Define B-spline curve Knowledge b
8 What is the advantage of parametric programming Analysis e
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 144
Dept. of MECH
in designing curves and surfaces? Discuss.
9 What are various modeling facilities desired? Analysis b
Specify the range of applications for which typical
10 Knowledge a
geometric model information is required?
Blooms
Sl.No Course
Questions Taxonomy
. Outcome
Level
UNIT-III
Assignments
Long Answer Questions
1 What is geometric models Analysis b
Explain about the various geometric construction
2 comprehension a
models
3 Explain curve representation methods comprehension b
A cubic Bezier curve is defined by the control
points as (20, 20), (60, 80), (120,100), and (150,
4 Analysis e
30). Find the equation of the curve and its
midpoint.
Specify the range of applications for which typical
5 geometric model information is required? Knowledge b
6 Discuss about Bezier curve with a neat sketch comprehension b
7 Explain about B-spline curve with a neat sketch Analysis a
Give a classification of the different surfaces that can
8 be used in geometric modeling applications? Knowledge b
Explain the coons and Bezier surfaces. What are
9 the differences and applications for which these are Knowledge e
used?
10 Briefly explain about the geometric modeling Knowledge b
Blooms Course
Questions Taxonomy Outcom
Sl.No. Level e
UNIT-IV
Assignments
Short Answer Questions
1 Define geometric commands Knowledge b
2 Define Entity trimming Knowledge e
3 Discuss display control commands Analysis b
4 What is drafting system? Explain it? comprehension a
5 Explain modify commands comprehension b
6 Define dimensioning Knowledge b
7 Define Entity division Knowledge b
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 145
Dept. of MECH
8 Discuss trim command Analysis e
9 Discuss array command Analysis b
10 Define solid modeling Knowledge a
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-IV
Assignments
Long Answer Questions
1 What is geometric commands Analysis b
2 Explain about the layers comprehension a
3 Explain windowing with a neat sketch? comprehension b
4 Explain Entity stretching Analysis e
What are the various types of display control
5 Knowledge b
commands?
6 Discuss about solid modeling comprehension b
7 Explain about polar array and rectangular array Analysis a
8 Briefly explain about the erase and cut Knowledge b
What is the importance of layers in drafting? Explain
9 Knowledge e
with an example.
10 Briefly explain about the rotate Knowledge b
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-V
Assignments
Short Answer Questions
1 Define Nc Knowledge b
2 Explain about computer aided part programming? Knowledge e
3 Discuss structure of CNC machine tools Analysis b
4 Explain CNC part programming comprehension a
5 Explain , computer aided part programming comprehension b
What are the features of machining center? Explain.
6 Knowledge b
7 Explain the structure of CNC machine tools? Knowledge b
8 Discuss Features of machining Center Analysis e
9 Discuss , manual part programming methods Analysis b
10 Discuss the features of manual part programming. Knowledge a
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 146
Dept. of MECH
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-V
Assignments
Long Answer Questions
Explain the principle of Numerical Control? Give the
1 advantages and disadvantages of Numerical Control Analysis b
of machine tools?
2 Explain about the turning center comprehension a
3 Explain Nc elements comprehension b
Explain the advantages using CNC as compared to
4 Analysis e
NC
5 Write about the Features of machining Center Knowledge b
Give a brief description of the CNC machining
6 centres and turning centre? comprehension b
7 Explain about Nc machine tools Analysis a
8 Briefly explain about the CNC part programming Knowledge b
Briefly explain about the manual part programming
9 Knowledge e
methods
Briefly explain about the computer aided part
10 Knowledge b
programming
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-VI
Assignments
Short Answer Questions
1 Define Part families Knowledge b
2 Define coding Knowledge e
3 Discuss Generative type CAPP System Analysis b
4 Explain Advantages of GT comprehension a
5 Explain limitations of GT comprehension b
6 Knowledge b
7 Define Production flow analysis Knowledge b
8 Discuss process planning Analysis e
9 Discuss Production flow analysis Analysis b
10 Define CAPP Knowledge a
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 147
Dept. of MECH
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-VI
Assignments
Long Answer Questions
1 What is Part families Analysis b
2 comprehension a
3 Explain Production flow analysis comprehension b
4 Explain Computer aided process planning Analysis e
5 Briefly explain about the applications of GT Knowledge b
6 comprehension b
7 Analysis a
8 Write about the CAPP System Knowledge b
Briefly explain about the Generative type CAPP
System
9 Knowledge e
Briefly explain about the retrieval type CAPP
10 Knowledge b
System
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-VII
Assignments
Short Answer Questions
1 Define QC Knowledge b
2 Define Terminology in quality control Knowledge e
3 Discuss the computer in QC Analysis b
4 Explain Non contact inspection methods-optical comprehension a
5 Explain Integration of CAQC with CAD/CAM comprehension b
6 Define Contact inspection method Knowledge b
7 Define Non contact inspection methods-Non optical Knowledge b
8 Discuss applications of CAQC Analysis e
9 Discuss applications of QC Analysis b
10 Define computer aided testing Knowledge a
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 148
Dept. of MECH
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-VII
Assignments
Long Answer Questions
1 What is computer aided testing Analysis b
2 Explain about the the computer in QC comprehension a
3 Explain Non contact inspection methods-Non optical comprehension b
4 Explain the applications of CAQC Analysis e
5 Write about the Terminology in quality control Knowledge b
6 Discuss about QC comprehension b
7 Explain about Contact inspection method Analysis a
Briefly explain about the Non contact inspection
8 Knowledge b
methods-optical
Briefly explain about the Integration of CAQC with
9 Knowledge e
CAD/CAM
10 Briefly explain about the applications of QC Knowledge b
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-VIII
Assignments
Short Answer Questions
1 Define manufacturing system Knowledge b
2 Define Machine tools Knowledge e
3 Discuss Machine tools and related equipment Analysis b
4 Explain material handling system comprehension a
5 Explain human labor in the manufacturing system comprehension b
6 Define computer control systems Knowledge b
7 Define human labor Knowledge b
8 Discuss applications of CIM Systems Analysis e
9 Discuss applications of material handling system Analysis b
10 Define CIM Knowledge a
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 149
Dept. of MECH
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-VIII
Assignments
Long Answer Questions
1 What is manufacturing system Analysis b
2 Explain about the Machine tools comprehension a
3 Explain Machine tools and related equipment comprehension b
4 Explain material handling system Analysis e
5 Write about the computer control systems Knowledge b
6 Discuss about human labor comprehension b
7 Explain about CIM Analysis a
Briefly explain about the human labor in the
8 Knowledge b
manufacturing system
9 Briefly explain about the CIMS benefits Knowledge e
10 Briefly explain about the material handling system Knowledge b
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 150
Dept. of MECH
12.0 INSTRUMENTATION AND CONTROL SYSTEMS(57025)
12.1 COURSE DESCRIPTION:
Course Name : INSTRUMENTATION AND CONTROL SYSTEMS
Course Code : 57025
Class : IV B. Tech I Semester
Branch : Mechanical Engineering
Year : 2015 – 2016
Mr. D. Prakash, Assistant Professor
Course Faculty : Mr.S.Phaneendra, Assistant Professor
COURSE OVERVIEW:
Presentation of fundamental measurement concepts and methodologies including the
control system concepts and the instrumentation loop drawing, principles of pressure, level,
temperature, calibration, deviation, errors. Basic principles of open and close loop control
system, controllers, benefits, block diagrams, types of control, and dynamic response
criteria of good control system, process stability, and response to disturbances.
This course covers the terminology, concepts, principles and computations used by
engineers and technicians to specify, analysis and maintain instrumentation and control
systems. It emphasizes practices in industry concepts, so that students learn what aspects of
plant design and control are critical. Practical examples have been used for many common
pressure, level, temperature and flow measuring systems. Approaches are presented for
measurement selection, process/modification, and control structure design.
12.2 PREREQUISITE(S):
Level Credits Periods / Week Prerequisites
MECHANICS OF SOLIDS, THERMAL
UG 4 5 ENGINEERING,HEAT TRANSFER, DYNAMICS OF
MACHINES, METROLOGY
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 151
Dept. of MECH
12.3MARKS DISTRIBUTIONS:
University End Total
Session Marks (25M)
Exam Marks Marks
Continuous Assessment Tests (Midterm tests):
There shall be 2 midterm examinations. Each midterm
examination consists of one objective paper, one
subjective paper and four assignments. The objective
paper is for 10 marks and subjective paper is for 10
marks, with duration of 1 hour 20 minutes (20 minutes for
objective and 60 minutes for subjective paper).
Objective paper is set for 20 bits of – multiple choice
questions, fill-in the blanks, 10 marks. Subjective paper
contains of 4 full questions (one from each unit) of
which, the student has to answer 2 questions, each
75 100
question carrying 5 marks. First midterm examination
shall be conducted for 2.5 units of syllabus and second
midterm examination shall be conducted for another 2.5
units. 5 marks are allocated for Assignments. First two
assignments should be submitted before the
conduct of the first mid, and the second two assignments
should be submitted before the conduct of the second mid.
The total marks secured by the student in each midterm
examination are evaluated for 25 marks, and the average
of the two midterm examinations shall be taken as the
final marks secured by each candidate.
12.4 EVALUATION SCHEME:
S. No Component Duration Marks
1 I Mid Examination 80 minutes 20
2 I Assignment - 05
3 II Mid Examination 80 minutes 20
4 II Assignment - 05
MID Examination marks to be considered as average of above 2 MID’s
5 External Examination 3 hours 75
Total 100
COURSE OBJECTIVES:
• Improving skills to adopt modern methods in mechanical engineering as
continuous improvement.
• To enhance the ability to apply mathematics and science fundamentals to the
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 152
Dept. of MECH
• engineering problems.
• To enhance the ability to work as practicing mechanical engineers in
manufacturing industries and consulting firms.
• To apply various statistical methods to analyze data pertaining to product quality.
• An ability to use the techniques, skills and modern engineering tools necessary for
engineering practice.
• Effectively understanding the data related to mechanical engineering design
systems and to analyze.
• To encourage students to develop analytical systems for controlling process
parameters.
12.5 COURSE OUTCOMES:
1. Graduates will demonstrate the ability to use basic knowledge in mathematics,
science and engineering and apply them to solve problems specific to mechanical
engineering.
2. Graduates will demonstrate the ability to design and conduct experiments,
interpret and analyze data, and report results.
3. Graduates will demonstrate the ability to function as a coherent unit in
multidisciplinary design teams, and deliver results through collaborative research
4. Graduates will demonstrate an understanding of their professional and ethical
responsibilities, and use technology for the benefit of mankind.
5. Graduates will have the confidence to apply engineering solutions in global and
societal contexts.
6. Graduate will be able to design a system to meet desired needs within
environmental, economic, political, ethical health and safety, manufacturability
and management knowledge and techniques to estimate time, resources tcomplete
project.
12.6 HOW PROGRAM OUTCOMES ARE ASSESSED:
Proficiency
Program Outcomes Level
assessed by
An ability to apply knowledge of computing,
mathematical foundations, algorithmic principles, and Assignments
computer science and engineering theory in the Midterm and
a H
modeling and design of computer-based systems to real- University
world problems (fundamental engineering analysis examinations
skills)
Assignments
An ability to design and conduct experiments, as well as
Midterm and
b to analyze and interpret data (information retrieval H
University
skills)
examinations
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 153
Dept. of MECH
An ability to design , implement, and evaluate a
computer-based system, process, component, or Assignments
program to meet desired needs, within realistic Midterm and
c S
constraints such as economic, environmental, social, University
political, health and safety, manufacturability, and examinations
sustainability (Creative Skills)
An ability to function effectively on multi-disciplinary
d N --
teams (team work)
An ability to analyze a problem, identify, formulate and Assignments
use the appropriate computing and engineering Midterm and
e H
requirements for obtaining its solution (engineering University
problem solving skills) examinations
An understanding of professional, ethical, legal, security
f and social N --
issues and responsibilities (professional integrity)
An ability to communicate effectively both in writing
g and orally N --
(speaking / writing skills)
The broad education necessary to analyze the local and
global impact of computing and engineering solutions
h N --
on individuals, organizations, and society (engineering
impact assessment skills)
Recognition of the need for, and an ability to engage in
Assignments
continuing
Midterm and
i professional development and life-long learning H
University
(continuing
examinations
education awareness)
A Knowledge of contemporary issues (social
j N --
awareness)
An ability to use current techniques, skills, and tools
necessary for
k computing and engineering practice (practical N --
engineering analysis
skills)
Assignments
An ability to apply design and development principles
Midterm and
l in the construction of software and hardware systems of S
University
varying complexity (software hardware interface)
examinations
An ability to recognize the importance of professional
development by pursuing postgraduate studies or face
m competitive examinations that offer challenging and N --
rewarding careers in computing (successful career and
immediate employment).
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 154
Dept. of MECH
12.7JNTUH SYLLABUS
UNIT – I
Definition – Basic principles of measurement – Measurement systems, generalized
configuration and functional descriptions of measuring instruments – examples. Dynamic
performance characteristics sources of error, Classification and elimination of error.
UNIT -II
Measurement of Displacement: Theory and construction of various transducers to
measure displacement- Piezo electric, Inductive, capacitance, resistance, ionization and
Photo electric transducers, Calibration procedures.
MEASUREMENT OF TEMPERATURE: Classification – Ranges – Various
Principles of measurement– Expansion, Electrical Resistance – Thermistor –
Thermocouple – Pyrometers – Temperature Indicators.
UNIT -III
MEASUREMENT OF PRESSURE: Units – classification – different principles used.
Manometers, Piston, Bourdon pressure gauges, Bellows – Diaphragm gauges. Low
pressure measurement – Thermal conductivity gauges – ionization pressure gauges,
Mcleod pressure gauge
UNIT –IV
MEASUREMENT OF LEVEL: Direct method – Indirect methods – capacitative,
ultrasonic, magnetic, cryogenic fuel level indicators – Bubler level indicators.
FLOW MEASUREMENT: Rotameter, magnetic, Ultrasonic, Turbine flow meter, Hot
– wire anemometer, Laser Doppler Anemometer (LDA).
UNIT -V
MEASUREMENT OF SPEED: Mechanical Tachometers – Electrical tachometers –
Stroboscope, Noncontact type of tachometer
Measurement of Acceleration and Vibration: Different simple instruments – Principles of
Seismic instruments – Vibrometer and accelerometer using this principle.
UNIT – VI
STRESS STRAIN MEASUREMENTS: Various types of stress and strain
measurements – electrical strain gauge – gauge factor – method of usage of resistance
strain gauge for bending compressive and tensile strains – usage for measuring torque,
Strain gauge Rosettes.
UNIT-VII
MEASUREMENT OF HUMIDITY – Moisture content of gases, sling sychrometer,
Absorption psychrometer, Dew point meter
MEASUREMENT OF FORCE, TORQUE AND POWER- Elastic force meters, load
cells, Torsion meters, Dynamometers.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 155
Dept. of MECH
UNIT-VIII
ELEMENTS OF CONTROL SYSTEMS: Introduction, Importance – Classification –
Open and closed systems Servomechanisms–Examples with block diagrams–
Temperature, speed & position control systems
TEXT BOOKS:
1. Measurement Systems: Applications & design by D.S Kumar.
2. Instrumentation, measurement & analysis by B.C.Nakra & K.K.Choudhary,TMH
REFERENCES:
1. Measurement systems: Application and design, Doeblin Earnest. O. Adaptation by
Manik an Dhanesh/ TMH
2. Instrumentation and Control systems/ S.Bhaskar/ Anuradha Agencies.
3. Experimental Methods for Engineers / Holman.
4. Mechanical and Industrial Measurements / R.K. Jain/ Khanna Publishers.
12.8 COURSE PLAN:
At the end of the course, the students are able to achieve the following Course Learning
Outcomes.
S Text/Ref
Learning objectives Topic
NO book
Have a discussion with introduction and T1 &R1
To know basics of
1 applications of the subject
Instrumentation
http://nptel.ac.in/courses/108105064/1
Principles of Definition, Basic principles of measurement T1 &R1
2
measurement http://nptel.ac.in/courses/108105064/1
Measurement systems T1 &R1
Types of measurement
3
systems
http://nptel.ac.in/courses/108105064/1
generalized configuration of measuring T1 &R1
Generalization of
4 system
measurement system
http://nptel.ac.in/courses/108105064/2
functional descriptions of measuring T1 &R1
Static characteristics of instruments
5
measurement system (static characteristics)
http://nptel.ac.in/courses/108105064/2
Dynamic functional descriptions of measuring T1 &R1
6 characteristics of instruments(dynamic characteristics)
measurement system http://nptel.ac.in/courses/108105064/3
Sources of error, Classification elimination T1 &R1
7 Errors in measurement
of error.
To understand the T1 &R1
measurement of Introduction to displacement and temperature
8
displacement and http://nptel.ac.in/courses/108105064/7
temperature
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 156
Dept. of MECH
Classification of T1 &R1
displacement and
9 Classification-ranges
temperature measuring
systems
Applications of Temperature measurement-importance T1 &R1
10 temperature measuring Applications
devices http://nptel.ac.in/courses/108105064/7
To understand the T1 &R1
Expansion thermometers
11 principle of expansion
http://nptel.ac.in/courses/108105064/8
thermometers
To understand the T1 &R1
Electrical thermometers, applications
12 principle of electrical
http://nptel.ac.in/courses/108105064/9
thermometers
To understand the T1 &R1
Resistance thermometers, applications
13 principle of resistance
http://nptel.ac.in/courses/108105064/9
thermometers
To understand the T1 &R1
Thermistors-applications, adv &
14 principle
disadvantages
of thermistors
To understand the thermocouples applications, adv & T1 &R1
15 principle of disadvantages
thermometers http://nptel.ac.in/courses/108105064/9
To understand the Radiation, pyrometers, temperature, T1 &R1
16 principle of radiation Indicators
pyrometers http://nptel.ac.in/courses/108105064/9
Types of measuring Measuring of displacement, piezo electric T1 &R1
17
devices inductive, ionization transducers
Calibration procedures Photo electric transducer and calibration T1 &R1
18
of transducers procedures
To know pressure T1 &R1
measurement of pressure, Units and
19 measuring devices and
classification
its units
Principle of low Low pressure measurement T1 &R1
20
pressure measurement http://nptel.ac.in/courses/108105064/18
To understand the T1 &R1
Different principles used. Manometers,
principle of
21 http://nptel.ac.in/courses/108105064/19
manometers and
Piston, Bourdon pressure gauges, Bellows
pressure measurement
To understand the T1 &R1
Diaphragm gauges, Low pressure
pressure measurement
22 measurement
principles by various
,http://nptel.ac.in/courses/108105064/18
devices
To understand the Thermal conductivity gauges, ionization, T1 &R1
23 pressure measurement pressure gauges
principles by various http://nptel.ac.in/courses/108105064/19
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 157
Dept. of MECH
devices
To understand the T1 &R1
pressure measurement Mcleod pressure gauge working principle
24
principles by various http://nptel.ac.in/courses/108105064/19
devices
To understand the T1 &R1
pressure measurement Simple problems related to pressure
25
principles by various measurement
devices
To understand the level T1 &R1
measurement measurement of level , Direct method,
26
principles by various Indirect methods
devices
To understand the T1 &R1
pressure measurement
27 capacitative, ultrasonic, magnetic,
principles by various
devices
To understand the T1 &R1
pressure To understand
28 capacitative, ultrasonic, magnetic,
the pressure various
devices
To understand the T1 &R1
pressure measurement
29 Cryogenic fuel level indicators
principles by various
devices
To understand the T1 &R1
pressure measurement
30 Bubbler level indicators.
principles by various
devices
To know the flow and T1 &R1
flow measurement, Rotameter, magnetic
31 its
http://nptel.ac.in/courses/108105064/12
measurement
Principles of flow Ultrasonic, Turbine flow meter, hot-wire T1 &R1
32 measurement anemometer
techniques http://nptel.ac.in/courses/108105064/13
Principles of flow T1 &R1
Laser Doppler Anemometer
33 measurement
(LDA)http://nptel.ac.in/courses/108105064/14
techniques
To understand the T1 &R1
Measurement of speed ,Mechanical
34 principle of speed
Tachometers
measurement
To know the principle T1 &R1
35 Electrical tachometers
of tachometers
To know the principle T1 &R1
36 Stroboscope, Noncontact type of tachometer
of tachometers
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 158
Dept. of MECH
To know the principle Measurement of Acceleration and Vibration T1 &R1
37 of acceleration and Different simple instruments
vibrations http://nptel.ac.in/courses/108105064/4
To understand the T1 &R1
.Principles of Seismic instruments
38 principle of
http://nptel.ac.in/courses/108105064/5
seismicinstrument
To understand the T1 &R1
Vibrometer and accelerometer using this
39 principle of vibrometer
principle
and accelerometer
To understand the T1 &R1
stress strain measurements , Various types of
40 principle of strain
stress and strain measurements
measurement devices
To understand the stress strain measurements , Various types of T1 &R1
41 principle of strain stress and strain measurements
measurement devices http://nptel.ac.in/courses/108105064/4
To understand the method of usage of resistance strain gauge T1 &R1
42 principle of resistance for bending compressive
strain gauge http://nptel.ac.in/courses/108105064/4
To understand the T1 &R1
43 principle of torque tensile strains , usage for measuring torque
measuring devices
To understand the T1 &R1
44 principle of strain Strain gauge Rosettes
gauge rosettes
To know the properties Introduction to measurement of humidity T1 &R1
45
of moist air ,Moisture content of gases,
To understand the T1 &R1
principles of sling psychrometer Absorption psychrometer,
46
measurement of moist Dew point meter
air
To understand the T1 &R1
sling psychrometer Absorption
principles of
47 psychrometer, Dew point meter
measurement of moist
http://nptel.ac.in/courses/108105064/20
air
To know the T1 &R1
definitions of terms Measurement of force,torque and power
48
force , torque and http://nptel.ac.in/courses/108105064/20
power
Force measuring T1 &R1
49 Elastic force meters, load cells
principles
To know power T1 &R1
50 Torsion meters
measuring devices
To know power Dynamometers T1 &R1
51
measuring devices http://nptel.ac.in/courses/108105064/6
52 To understand the Introduction to control systems T1 &R1
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 159
Dept. of MECH
concept of control
systems
Types of control elements of control systems , T1 &R1
53 systems and its
elements
Types of control Classification , Open and closed Systems T1 &R1
54 systems and its
elements
To understand the T1 &R1
55 principle
servomechanism Servomechanisms,
Ability to drawn the Examples with block diagrams T1 &R1
feedback system for
56
various measuring
devices
Application of Speed control systems T1 &R1
57
feedback system
Application of position control systems T1 &R1
58
feedback system
59 Revision of the unit Review of control systems T1 &R1
12.9 MAPPING COURSE OBJECTIVES LEADING TO THE ACHIEVEMENT OF
PROGRAM OUTCOMES:
Program Outcomes
Course 1
Objectives
a b c d e f g h i j k l m
I H S H
II H
III H
IV H
V H
VI H `
H
VII S H N
S=Supportive H=High related
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 160
Dept. of MECH
12.10 Mapping course outcomes leading to the achievement of the program
outcomes:
Program Outcomes
Course
Outcomes a b c d e f g H i j k l m
1 H H S
2 H H
3 H H
4 H S H
5 H
6 S S
S=Supportive H=High related
12.11 OBJECTIVE QUESTIONS
UNIT-I
1. The purpose of instruments is to [ A ]
A) Allow measurements to be made B) transmit the information
C) Change the signal D) all of the above
2. The measurement refers to [ B ]
(A) Measured variable (B) Primary signal
(C) output (D) All of the above
3. The Smallest change in measured value to which the instrument will respond is
called. [ D ]
a) Accuracy b) Precision c) Resolution d) Sensitivity
4. In measurement systems, which of the following static characteristics are desirable
[ D ]
a) Accuracy b) Sensitivity c) Reproducibility d) All of the above
5. Gearing, backlash, friction between moving parts and scale accuracies are generally
Known as [A ]
A) Instrument error B) interference error C) calibration error D) interaction error
6. In a diaphragm pressure gauge a change of 20 Pa is required to change the deflection
of the diaphragm by 1mm. The static sensitivity of the gauge will be [ a ]
(a) 0.05mm/Pa (b) -0.05mm/Pa(c) 0.25mm/Pa (d)- 0.25mm/Pa
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 161
Dept. of MECH
7. A force transducer measures a range of 0-150N with a resolution of 0.1 percent of full
scale. The smallest change which can be measured is [ a]
(a) 0.15N (b) 1.25N (c) -0.25N (d) -1.25
8. A Pressure gauge of range 0-20 bar is stated to have an error of ±0.25 bar when
calibrated. Percentage error on basis of maximum scale value will be [ b ]
(a) ± 0.25 (b) ± 1.25 (c) ± 2.25 (d) ± 0.15
9. Calibration is [ B ]
(A) The process of comparison of the true value with the measured value
(B) The process of comparison of the measured value with the true value
(C) The process of drawing plot of the measured value vs the true value
(D) The process of varying the measured value with the true value
(E)
10. A Thermometer reads 73.50C and true value of temperature is 73.150C.The error and
correction for thermometer will be [ A ]
(a) (0.35 C), (-0.35 C) (b). (0.45 C), (-0.35 C) (c) - 0.350C, 0.350C (d) -0.450C, 0.350C
0 0 0 0
11. The phase lag produced by transportation relays [ C ]
(a) is independent of frequency
(b) is inverseh'proportional to frequency
(c) increases linearly with frequency
(d) decreases linearly with frequency
12. technique is not applicable to nonlinear system ? [ A ]
(a) Nyquist Criterion
(b) Quasi linearization
(c) Functional analysis
(d) Phase -plane representation
13. Addition of zeros in transfer function causes which of the following ?[ B ]
(a) Lead-compensation
(b) Lag-compensation
(c) Lead-lag compensation
(d) None of the above
14. In case of type-1 system steady state acceleration is [ B ]
(a) unity(b) infinity(c) zero (d) 10
15. Velocity error constant of a system is measured when the input to the system is unit
_______ function. [ B ]
(a) parabolic(b) ramp(c) impulse(d) step
16. The position and velocity errors of a type-2 system are[ C ]
(a) constant, constant(b) constant, infinity(c) zero, constant (d) zero, zero
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 162
Dept. of MECH
17. The type 2 system has at the origin. [ D ]
(a) no net pole(b) net pole(c) simple pole(d) two poles
18. The type 0 system has ______ at the origin. [ A ]
(a) no pole
(b) net pole
(c) simple pole
(d) two poles
19. A conditionally stable system exhibits poor stability at [ B ]
(a) low frequencies
(b) reduced values of open loop gain
(c) increased values of open loop gain
(d) none of the above
20. Static error co-efficients are used as a measure of the effectiveness of closed loop
systems for specified ________ input signal. [ D ]
(a) acceleration
(b) velocity
(c) position
(d) all of the above
UNIT-II
Objective Questions
1. Thermopile is [ A ]
a).A combination of number of thermocouples connected in series
b).A combination of number of thermocouples connected in parallel
c).A combination of number of thermocouples some connected in series and some
connected in Parallel
d).None of the above
2. Reference junction compensation in thermocouples can be provided through use of [
C ]
A) Hardware only B) software only C) Both hardware and software
D) none of the above
3. Piezo electric type of load cells can be used for measurement [ C ]
a.Dynamic force only
b).Dynamic force and static forces provided the load cells have a small time constant.
c).Dynamic force and static forces provided the load cells have a large time constant.
d).None of the above
3. Which type of transducer is generally used for the measurement of liquid level?[ A ]
A) Capacitive B) resistive C) piezo electric D) pyrometer
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 163
Dept. of MECH
4. The emf of a therm ocouple with junctions at t1 and t2 is the algebraic sum of the
emf’s of two couples of same material with junctions at t1 and t2 and V and t1
respectively. This statement is known as [ B ]
(A) The law of homogeneous circuit (B) law of successive or intermediate
temperature
(C) Law of intermediate metals (D) Seebeck law
5. A bourdon tube indicator (Range-0oC to 250 oC) produces rotation of 0oC to 2700C. If
the mechanical levers and gears have an amplification of 30, the sensitivity of
instrument will be [b ]
a. 6.28x10-4 rad/0C b. 6.28x10-5 rad/0C
c. 6.8x10-4 rad/0C d. 5.28x10-4 rad/0C
6. A radiation pyrometer has a 20:1distance factor. When the radiation receiver is 160cm
away from the target surface, the diameter of the target should be [ a ]
a. 8cm b. 7cm c. 10cm d. 5cm
7. The correct match for list-I and List –II shown below will be [ D]
List-I List-II
(Type of thermometer) (Thermo-metric property)
A. Mercury in glass 1. Pressure
B. Thermocouple 2. Electrical resistance
C. Thermistor 3. Volume
D. Constant volume gas 4. Inducted electrical voltage
Codes: A B C D
(a) 1 4 2 3
(b) 3 2 4 1
(c) 1 2 4 3
(d) 3 4 2 1
8. A Quartz crystal with thickness of 2mm , voltage sensitivity of 0.05 Volt-m/N is
subjected to a pressure of 15 x 105 N/m2.voltage developed by piezoelectric pick up will
be [ B ]
a.100 V b. 150 V c. 120 V d. 10V
9. The spring of a transducer deflects 0.04mm when subjected to a force of 8KN.The
input force for an output displacement will be [ B ]
a. 10kN b. 12kN c.-12kN d. -10kN
b.
10.The transfer function technique is considered as inadequate under which of the
following conditions ? [ D ]
(a) Systems having complexities and non-linearities
(b) Systems having stability problems
(c) Systems having multiple input dis¬turbances
(d) All of the above
11. An amplidyne can give which of the following characteristics ?[ d ]
(a) Constant current(b) Constant voltage(c) Constant current as well as constant voltage
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 164
Dept. of MECH
(d) Constant current, constant voltage and constant power(e) None of the above
12. With feed back _____ reduces.[ B ]
(a) system stability(b) system gain(c) system stability and gain(d) none of the above
13. In a control system integral error compensation _______ steady state error[ B ]
(a) increases(b) minimizes(c) does not have any effect on (d) any of the above
14. If the gain of the critical damped system is increased it will behave as[ D ]
(a) oscillatory(b) critically damped(c) overdamped(d) underdamped(e) none of the
above
15. A differentiator is usually not a part of a control system because it[ C ]
(a) reduces damping(b) reduces the gain margin(c) increases input noise(d) increases
error
16.When the initial conditions of a system are specified to be zero it implies that the
system is [ d ]
(a) at rest without any energy stored in it
(b) working normally with reference input
(c) working normally with zero reference input
(d) at rest but stores energy
17. A phase lag lead network introduces in the output [ C ]
(a) lag at all frequencies
(b) lag at high frequencies and lead at low frequencies
(c) lag at low frequencies and lead at high frequencies
(d) none of the above
18. technique gives quick transient and stability response [ A ]
(a) Root locus(b) Bode(c) Nyquist(d) Nichols
19. is not a final control element. [ B ]
(a) Control valve(b) Potentiometer(c) Electro-pneumatic converter(d) Servomotor
20. In a stable control system saturation can cause which of the following ?[ A ]
(a) Low-level oscillations(b) High-level oscillations(c) Conditional stability
(d) Overdamping
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 165
Dept. of MECH
UNIT-III
1. Bellow type of gauges have the advantage that [ A ]
2. They can be used for low, medium and high pressures
3. They can be used for measurement of dynamic pressure
4. They do not need any temperature compensating device
5. None of the above
2.Vacuum pressure is [ C ]
A) Equal to gauge pressure B) equal to atmospheric pressure
C) Lower than atmospheric pressure D) equal to absolute pressure
3.A U-Tube differential manometer is used inverted when [ A ]
A).Pressure difference is small B) pressure difference is large
C) Cannot be used inverted D) none
4.Mercury is used in barometers because it [ D ]
a. Does not stick to the walls of the tubing b is shining and can be read easily
c. has practically zero vapour pressure d has high density
5.Bridman gauges are used for measurement of. [D]
a) Vacuum b) Medium pressures c) High pressures d) Very high pressures
6. Which of the following can be measured by the use of a tacho-generator ?[ B ]
(a) Acceleration (b) Speed (c) Speed and acceleration (d) Displacement
7. is not a final control element.[ B ]
(a) Control valve (b) Potentiometer (c) Electro-pneumatic converter (d)
Servomotor
8. In pneumatic control systems the control valve used as final control element
converts [B ]
(a) pressure signal to electric signal (b) pressure signal to position change
(c) electric signal to pressure signal (d) position change to pressure signal
9. Pressure error can be measured by which of the following ?[ A ]
(a) Differential bellows and straingauge (b) Selsyn
(c) Strain gauge (d) Strain gauge and potentiometer
10. Which of the following is the non-linearity caused by servomotor ?[ C ]
(a) Static friction (b) Backlash (c) Saturation (d) None of the above
11. Which of the following is an electromechanical device ? [ C ]
(a) Induction relay (b) Thermocouple (c) LVDT(d) Any of the above
12. A differentiator is usually not a part of a control system because it[ C ]
(a) reduces damping(b) reduces the gain margin(c) increases input noise(d) increases error
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 166
Dept. of MECH
13. If the gain of the critical damped system is increased it will behave as [ D ]
(a) oscillatory(b) critically damped(c) overdamped(d) underdamped(e) none of the
above
14. In a control system integral error compensation _______ steady state error[ B ]
(a) increases(b) minimizes(c) does not have any effect on(d) any of the above
15. With feed back _____ reduces. [ B ]
(a) system stability(b) system gain(c) system stability and gain(d) none of the above
16. Which of the following can be measured byLVDT? [ D ]
(a) Displacement(b) Velocity(c) Acceleration(d) Any of the above
17. directly converts temperature into voltage. [ A ]
(a) Thermocouple(b) Potentiometer(c) Gear train(d) LVDT(e) None of the above
18. Which of the following is the output of a thermocouple ? [ D ]
(a) Alternating current(b) Direct current(c) A.C. voltage(d) D.C. voltage
(e) None of the above
19.A.C. servomotor is basically a [ C ]
(a) universal motor(b) single phase induction motor(c) two phase induction motor
(d) three phase induction motor
20. The first order control system, which is well designed, has a[ c ]
(a) small bandwidth(b) negative time constant
(c) large negative transfer function pole
(d) none of the above
UNIT-IV
1. Which of the following meters is used for measuring flow of clean fluids only
[ D ]
A) Ultrasonic flow meter B) turbine flow meter
C) Laser doppler anemometer D) hot wire anemometer
2. The fluid flow between the electrodes of an Electromagnetic flow meter generates
an emf which is a function of [ C ]
(A) Dynamic pressure (B) Discharge (C) Flow Velocity (D) ALL of the
above
3. A laser Doppler anemometer can function properly if the fluid [ A ]
a) Contains small tracer particles b) Contains large concentration of
tracer particles
c) Contains no tracer particles d) none of the above
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 167
Dept. of MECH
4. A meter suitable for flow totalisation is. [ A ]
a) Turbine flow meter b) Venturimeter c) Rotameter d) Orifice plate
5. The non contact device for measuring the flow velocities is _Laser Doppler
anemometer
6. A gas is flowing with a velocity of 10 m/s in a pipe of diameter 0.15m.if density
of gas is 5 kg/m3and efficiency is 5x10-5, what will be the Reynolds number [ C ]
a. 1.5x10-5 b.2.5x10-3 c.1.5x10-3 d.2.5x10-5
7. A Venturimeter is to be used to measure a maximum flow rate of water of 3.5
kg/s at 20oC.The maximum diameter in which fluid is flowing will be [ A ]
a. 4.45cm b.4.cm c.4 mm d.4.5mm
8. A pitot tube when measured the velocity of water at the center of pipe of dia
2.5cm, the difference between stagnation and static pressure heads was indicated
to be 8.5cm of water. The flow velocity will be [ A ]
a.1.291m/s b.0.865m/s c.0.0424m/s d. 0.0424m3/s
9. The fluid flow between the electrodes of an Electromagnetic flow meter generates
an emf which is a function of [ C]
(A) Dynamic pressure (B) Discharge (C) Flow Velocity (D) ALL of the
above
10. From which of the following transfer function can be obtained ? [ A]
(a) Signal flow graph
(b) Analogous table
(c) Output-input ratio
(d) Standard block system
11. is the reference input minus the primary feedback. [ C ]
(a) Manipulated variable(b) Zero sequence(c) Actuating signal (d) Primary feedback
12.The term backlash is associated with [ A ]
(a) servomotors(b) induction relays(c) gear trains (d) any of the above
13. With feedback _____ increases. [ A ]
(a) system stability(b) sensitivity(c) gain (d) effects of disturbing signals
14. By which of the following the system response can be tested better ? [ C ]
(a) Ramp input signal(b) Sinusoidal input signal
(c) Unit impulse input signal
(d) Exponentially decaying signal
15. In a system zero initial condition means that [ A ]
(a) The system is at rest and no energy is stored in any of its components
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 168
Dept. of MECH
(b) The system is working with zero stored energy
(c) The system is working with zero reference signal
16. In a system low friction co-efficient facilitates[ a ]
(a) reduced velocity lag error(b) increased velocity lag error
(c) increased speed of response(d) reduced time constant of the system
17. Hydraulic torque transmission system is analog of[ a ]
(a) amplidyne set(b) resistance -capacitance parallel circuit(c) motor-generator set
(d) any of the above
18. Spring constant in force-voltage analogy is analogous to[ b ]
(a) capacitance(b) reciprocal of capacitance(c) current (d) resistance
19. The frequency and time domain are related through which of the following?[ a ]
(a) Laplace Transform and Fourier Integral(b) Laplace Transform
(c) Fourier Integral(d) Either (b) or
20.An increase in gain, in most systems, leads to[ a ]
(a) smaller damping ratio(b) larger damping ratio(c) constant damping ratio
(d) none of the
UNIT-V
1. The stroboscopic method of speed measurement has the advantage that [a ]
a. The method is simple and straight forward
b. The multiples of angular speed can be measured
c. A stationary image can be observed
d. There is no need of any physical contact between the instrument and the
rotating shaft
2. An Automobile Speedometer operates on the principle of the following
Tachometer. [ c ]
a) Centrifugal tachometer b) stroboscope
c) Drag cup tachometer d) tachogenerator
3. One of the following is the electrical non –contact Tachometer [ c ]
a) Stroboscope b) photoelectric tachometer
c) Inductive pick-up tachometer d) all of the above
4. The average speed measurements are given by [ a ]
(A) Centrifugal Tachometer (B) Drag Cup Tachometer
(C) Revolution Counter & a timer (D) Stroboscope
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 169
Dept. of MECH
5. Tachometer are used to measure [ b]
(A) Displacement (B) angular velocity (C) vibration (D)
time
--
6. A disc mounted on a rotating shaft has one mark and a stroboscope is used for
measurement of shaft speed. If the shaft is turning N revolutions per second,
three stationary marks will be seen if [ b ]
a. f=n b. f=3n c. f=n/3 d. f=2n/3
7. An oscilloscope displays a sine wave and the distance between the first and
fourth peaks is found to be 5.4cm. if the time base setting is 20 x10-3 s/cm, the
time periodic time of sine wave will be [ a ]
(a).36x10-3 s b.26x10-2sc.30x10-1s d.30x10-2s
8. For the above problem frequency will be [ c ]
(a).25.78Hz b. 20.78Hz c. 27.78Hz d. 37.78Hz
9. When an inductive type magnetic pick up is used for measurement of shaft speed
it is found to be 3600rpm.if the frequency meter gives the count within ±5Hz.the
range within which shaft speed can is [ ]
a. (3600±5) rpm b. (4600±5) rpm c. (2800±5) rpm d. (1600±5) rpm
10. A body is stated to have vibrational acceleration amplitude of 16g at 8 Hz. The
velocity amplitude will be [ a ]
(a).3.124m/s b. 4.124m/s c 1.124m/s. d.2.124m/s
11. In electrical-pneumatic system analogy the current is considered analogous to[ d ]
(a) velocity(b) pressure(c) air flow (d) air flow rate
12. In liquid level and electrical system analogy, voltage is considered analogous to[ a
]
(a) head(b) liquid flow(c) liquid flow rate(d) none of the above
13. The viscous friction co-efficient, in force-voltage analogy, is analogous to[ b ]
(a) charge(b) resistance(c) reciprocal of inductance(d) reciprocal of conductance
(e) none of the above
14. . In force-voltage analogy, velocity is analogous to[ a ]
(a) current(b) charge(c) inductance(d) capacitance
15. In thermal-electrical analogy charge is considered analogous to[ d ]
(a) heat flow(b) reciprocal of heat flow(c) reciprocal of temperature
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 170
Dept. of MECH
(d) temperature(e) none of the above
16. Mass, in force-voltage analogy, is analogous to[ c ]
(a) charge (b) current(c) inductance(d) resistance
17. The transient response of a system is mainly due to[ c ]
(a) inertia forces(b) internal forces
(c) stored energy(d) friction
18. signal will become zero when the feedback signal and reference signs are equal.[ b
]
(a) Input(b) Actuating(c) Feedback(d) Reference
19. A signal other than the reference input that tends to affect the value of controlled
variable is known as[ a ]
(a) disturbance(b) command(c) control element (d) reference
20. The transfer function is applicable to which of the following ?[ a ]
(a) Linear and time-in variant systems(b) Linear and time-variant systems
(c) Linear systems(d) Non-linear systems(e) None of the above
UNIT-VI
1. A Strain gauge should have high value of gauge factor [ b ]
a) To reduce hysteresis effects b) to increase sensitivity
c) To reduce the effect of vibration in ambient temperature
d) To give a linear relation between applied strains and resistance change
2. Which of the following gauge is having the maximum gauge factor [ c ]
a) Wire resistance gauge b) metal foil gauge c) semi conductor gauge d) all of these
3. Half bridge circuit uses [ a ]
a) One strain gauge b) two strain gauge c) three strain gauge d) four strain gauge
4. For effective operation the strain gauge material should have a low value of [ b ]
a) Gauge factor b) temperature sensitivity
c) Nominal resistance d) yield point and endurance limit
5. A strain gauge is a passive transducer and is employed for converting [ a ]
A) Mechanical displacement into a change of resistance
B) Pressure into a change of displacement
C) Force into displacement D) None of the above.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 171
Dept. of MECH
6. A strain gauage with a resistance of 250 Ω undergoes a change of 0.150 Ω during a
test when subjected to mechanical strain equivalent to 1.5 x10-4. then gauge factor is [ c ]
a.2.0 b.3.0 c.4.0 d.10.0
7. A gauge of resistance 100 Ω and a gauge factor of 2.0 is shunted by a resistance of
120 k then the equivalent strain will be[ d ]
a.216 µ-strain b.116 µ-strain c. 166 µ-strain d. 416 µ-strain
8. The sensitivity factor of an electrical resistance strain gauge is of the order of [ b ]
a.1 to 5 b.1.5 to 2 c.0.5to 1 d.5 to 10
9. The second derivative input signals modify which of the following ?[ d ]
(a) The time constant of the system(b) Damping of the system(c) The gain of the system
(d) The time constant and suppress the oscillations (e) None of the above
10. Which of the following statements is correct for any closed loop system ?[ c ]
a) All the co-efficients can have zero value(b) All the co-efficients are always non-zero
(c) Only one of the static error co-efficients has a finite non-zero value(d) None of the
11.Which of the following statements is correct for a system with gain margin close to
unity or a phase margin close to zero ?[ c ]
(a) The system is relatively stable(b) The system is highly stable(c) The system is highly
oscillatory(d) None of the above
12. Due to which of the following reasons excessive bond width in control systems
should be avoided ?[ c ]
(a) It leads to slow speed of response(b) It leads to low relative stability
(c) Noise is proportional to band width(d) None of the above
13. In a stable control system backlash can cause which of the following ?[ d ]
(a) Underdamping(b) Overdamping(c) Poor stability at reduced values of open loop gain
(d) Low-level oscillations
14. In an automatic control system which of the following elements is not used ?[ d ]
(a) Error detector (b) Final control element (c) Sensor (d) Oscillator
15. In a control system the output of the controller is given to[ a ]
(a) final control element(b) amplifier (c) comparator (d) sensor (e) none of the
above
16.A controller, essentially, is a[ c ]
(a) sensor(b) clipper(c) comparator(d) amplifier
17.Which of the following is the input to a controller ?[d ]
(a) Servo signal(b) Desired variable value(c) Error signal(d) Sensed signal
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 172
Dept. of MECH
18.The on-off controller is a _____ system.[ a ]
(a) digital(b) linear(c) non-linear(d) discontinuous
19. The capacitance, in force-current analogy, is analogous to[ d ]
(a) momentum(b) velocity(c) displacement(d) mass
20.The temperature, under thermal and electrical system analogy, is considered
analogous to[ a ]
(a) voltage(b) current(c) capacitance(d) charge(e) none of the above
UNIT-VII
1. The amount of moisture in air can be measured by [ c ]
a) Mass spectrometer b) thermistor c) sling psychrometer d) photometer
2. To prevent withering of food products & spoilage of dried eggs the humidity must
be [ a ]
(A) High (B) low (C) does not effect (D) none
3. The amount of water vapor actual present in the air is [ c]
(A) Relative humidity (B) atmospheric humidity (C) humidity (D) absolute humidity
4 .is a part of the human temperature control system.[ b ]
(a) Digestive system(b) Perspiration system (c) Ear (d) Leg movement
5. By which of the following the control action is determined when a man walks along
a path ?[ d ]
(a) Brain(b) Hands(c) Legs(d) Eyes
6. is a closed loop system.[ a ]
(a) Auto-pilot for an aircraft(b) Direct current generator(c) Car starter(d) Electric switch
7. Which of the following devices are commonly used as error detectors in instruments ?
[ d ]
(a) Vernistats(b) Microsyns(c) Resolvers(d) Any of the above
8. Which of the following should be done to make an unstable system stable ?[ b ]
(a) The gain of the system should be decreased
(b) The gain of the system should be increased
(c) The number of poles to the loop transfer function should be increased
(d) The number of zeros to the loop transfer function should be increased
9.increases the steady state accuracy.[ a ]
(a) Integrator(b) Differentiator(c) Phase lead compensator (d) Phase lag compensator
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 173
Dept. of MECH
10.A.C. servomotor resembles[ a ]
(a) two phase induction motor(b) Three phase induction motor (c) direct current series
motor
(d) universal motor
11.As a result of introduction of negative feedback which of the following will not
decrease ?[ a ]
(a) Band width(b) Overall gain(c) Distortion(d) Instability
12.Regenerative feedback implies feedback with[ d ]
(a) oscillations(b) step input(c) negative sign(d) positive sign
13.The output of a feedback control system must be a function of[ a ]
(a) reference and output(b) reference and input(c) input and feedback signal(d) output and
feedback signal
14. is an open loop control system.[ b ]
(a) Ward Leonard control(b) Field controlled D.C. motor(c) Stroboscope(d) Metadyne
15. A control system with excessive noise, is likely to suffer from[ a ]
(a) saturation in amplifying stages(b) loss of gain(c) vibrations(d) oscillations
16.Zero initial condition for a system means[ d ]
(a) input reference signal is zero(b) zero stored energy(c) ne initial movement of moving
parts(d) system is at rest and no energy is stored in any of its components
17.Transfer function of a system is used to calculate which of the following ?[ c ]
(a) The order of the system(b) The time constant(c) The output for any given input
(d) The steady state gain
18.The band width, in a feedback amplifier.[ c ]
(a) remains unaffected(b) decreases by the same amount as the gain increase
(c) increases by the sane saaaajajt as the gain decrease(d) decreases by the same amount
as the gain decrease
19.On which of the following factors does the sensitivity of a closed loop system to gain
changes and load disturbances depend ?[ d ]
(a) Frequency(b) Loop gain(c) Forward gain(d) All of the
20.The transient response, with feedback system[ d ]
(a) rises slowly(b) rises quickly(c) decays slowly(d) decays
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 174
Dept. of MECH
UNIT-VIII
1.A ______________ is defined as a set of inter connected objects and attributes [ A ]
A) System B) Process C) Non linear system D) None of these
2.A linear system is one which is described by [ C ]
A) Simulation equation B) Differential equation
C) Differential equation of obeying superposition theorem
D) Equations with constant parameters
d 2 x 2 2 dx sin x f (t )
3.Consider the following equation dt dt the above equation
represents[B]
A) Linear system B) Nonlinear system C) Time varying system D) Discrete system
4.Traffic control by means of signals operated on a time basis is an example of
_____________control system [ A]
A) Open loop B) Closed loop C) Manual D) Feedback
5.Negative feedback is generally used in most control systems. The units on the Laplace
transform operator‘s’ are [ ]
(A) Time (B) 1/time (C) frequency (D) 1/frequency
6.A control system will be ____ if the open loop gain exceeds unity at a phase lag of 180
degrees. [ ]
(A) Stable (B) unstable (C) partially stable (D) any of the above.
7.In an open loop control system [ a ]
(a) Output is independent of control input(b) Output is dependent on control input
(c) Only system parameters have effect on the control output(d) None of the
above
8. For open control system which of the following statements is incorrect ? [ b ]
(a) Less expensive
(b) Recalibration is not required for maintaining the required quality of the output
(c) Construction is simple and maintenance easy
(d) Errors are caused bydisturbances
9. A control system in which the control action is somehow dependent on the output is
known as [ a ]
(a) Closed loop system
(b) Semiclosed loop system
(c) Open system
(d) None of the above
10. In closed loop control system, with positive value of feedback gain the overall gain
of the system will[ a ]
(a) decrease(b) increase(c) be unaffected(d) any of the above
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 175
Dept. of MECH
11. Which of the following is an open loop control system ?[ a ]
(a) Field controlled D.C. motor(b) Ward leonard control(c) Metadyne(d) Stroboscope
12.Which of the following statements is not necessarily correct for open control system ?
[ b ]
(a) Input command is the sole factor responsible for providing the control action
(b) Presence of non -linearities causes malfunctioning
(c) Less expensive
(d) Generally free from problems of non-linearities
13.In open loop system [ d ]
(a) the control action depends on the size of the system(b) the control action depends on
system variables(c) the control action depends on the input signal
(d) the control action is independent of the output
14.has tendency to oscillate. [ b ]
(a) Open loop system(b) Closed loop system(c) Both (a) and (b)(d) Neither (a) nor (b)
15.A good control system has all the following features except [ b ]
(a) good stability (b) slow response (c) good accuracy (d) sufficient power handling
capacity
16.A car is running at a constant speed of 50 km/h, which of the following is the
feedback element for the driver ? [ c ]
(a) Clutch (b) Eyes
(c) Needle of the speedometer (d) Steering wheel (e) None of the above
17.The initial response when the output is not equal to input is called [ a ]
(a) Transient response (b) Error response (c) Dynamic response
(d) Either of the above
18.A control system working under unknown random actions is called [ c ]
(a) computer control system (b) digital data system (c) stochastic control system
(d) adaptive control system
19. An automatic toaster is a ______ loop control system. [ a ]
(a) open(b) close(c) partially closed(d) any of the above
20.Any externally introduced signal affecting the controlled output is called a [ b ]
(a) feedback(b) stimulus(c) signal (d) gain control
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 176
Dept. of MECH
12.12 TUTORIAL QUESTIONS:
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-I
Tutorials
Answer Questions
Draw the block diagram of a generalized measurement
1 Remember a
system and explain various elements of it..
Explain the dynamic response characteristics of first
2 order Understand b
instruments to step, ramp and sinusoidal inputs
Distinguish between direct and indirect methods of
3 Understand c
measurement with suitable examples.
What are desired, modifying and interfering inputs for
an
instrumentation system? How do you correct the
4 effects of Understand c
modifying and interfering inputs by the method of
signal filtering
? Explain by means of suitable examples.
5 Explain the important static characteristics. Remember d
Explain the following functional blocks by means of
examples.
6 i. Variable conversion element Understand a
ii. Data manipulation element
iii. Data transmission element.
What standard inputs are considered for obtaining
dynamic
7 Remember a
characteristics of measurement systems? Plot the
signals.
Briefly explain the reasons for systematic errors in
8 Understand c
measurement systems.
9 Explain types of measurement systems? Understand c
10 Explain types of instruments with their examples Understand c
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 177
Dept. of MECH
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-II
Tutorials
Answer Questions
What are the desirable properties of Piezoelectric
1 Understand a
materials? Mention few piezoelectric materials.
Explain the working of a total radiation pyrometer with
2 Understand b
a neat sketch. State its advantages anddisadvantages.
Explain by means of neat sketches, the working of
3 thermocouples. What is ambient temperature Remember c
compensation?
By means of neat sketches, explain the working of a
4 RTD thermometer. Why protection is needed for the Remember c
sensing element?
Explain in detail with neat sketches.
(a) Liquid level measurement using Capacitive
transducer
5 Remember d
(b) Sight glass level indicator
(c) Bubbler level indicator. [6+4+6]
Explain by means of neat sketches, the working of
6 thermocouples. What is ambient temperature Remember a
compensation?
7 Classify inductive transducers. Understand a
Explain the working of LVDT by means of neat
8 Understand c
sketches.
Derive an expression for time response of first order
system tostep input. A thermometer having a time
9 Constant of 5s is quickly inserted in a bath of Understand c
temperature 80o C, what would
be the indication after 2.5 sec.
Difference between thermo couple and thermistor for
10 Comparison c
temperature measurement?
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 178
Dept. of MECH
Blooms
Course
Sl.no. Questions Taxonomy
Outcome
Level
UNIT-III
Tutorials
Short Answer Questions
What is a Diaphragm gauge? Explain its construction,
1 a
working with a neat sketch. Understand
Explain the construction and working principle of the
2 b
McLeod pressure gauge with a neat diagram Understand
What is the basic principle in thermal conductivity
3 gauge? Explain the working principle of thermal couple Understand c
type conductivity gauge.
Explain the working principle of Pirani thermal
4 Understand c
conductivity gauge.
Explain how sensitivity can be increased by using
5 inclined tube manometer. Describe its construction, Understand d
advantages and limitations.
Explain the basic principle of working of a bellow type
6 Understand a
pressure gauge.
How do you measure the pressure with the help of U-
7 tube Understand a
manometer andMicro manometer.
A McLeod gauge having V = 200cm3 and a capillary
diameter of 2 mm is used to measure the gas pressure.
8 Understand c
What will be the pressure of gas corresponding to a
capillary reading of 4cm?
9 Briefly explain bourdon tube pressure gauge? Understand c
Explain mechanical type thermometers? C
10 Understand
Blooms
Sl.No. Questions Taxonomy a
Level
UNIT-IV
Tutorials
Answer Questions
Sketch and working of a capacitive type level gauge. Show that
1 d
level is directly proportional to the Capacitance measured.
Understand
2 Explain construction, working and applications of ultrasonic flow
Understand a
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 179
Dept. of MECH
meter with suitable diagram.
Describe in detail with neat sketches Float
3 a
operated Rheostat Understand
Describe in detail with neat sketches Hook Level
4 c
indicator Understand
Enumerate the principle of operation,
5 construction details, advantages and limitations c
of Rotameter. Understand
List out the advantages and disadvantages of In
6 Understand c
direct method level measurement.
Explain how a wire mounted normal to probe
axis", type hot wire anemometer is used in flow
7 Understand a
measurement. Enumerate the principle of
operation and its limitations.
Explain with a neat sketch, the principle of
8 Understand b
operation of various solid level indicators
Describe in detail with neat sketches Turbine
9 Understand c
Flow meter
List out the important of calibration of flow
10 measuring knowledge c
instruments.
UNIT-V
Tutorials
Answer Questions
State the advantages and disadvantages of
1 Apply d
electrical tachometers.
Explain construction, working of stroboscope
2 Apply a
with suitable diagram
Explain the construction, principle of working
3 and advantages and disadvantages of LVDT Apply a
accelerometer
Describe the functioning of a stroboscope and
describe and explain how speed of a rotating shaft
4 Apply c
can be measured using a single pattern and multi
pattern disc
Explain the construction, principle of working
5 and advantages of Capacitance vibration sensor Apply c
accelerometers
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 180
Dept. of MECH
A centrifugal tachometer having range 25-300,
250-3000, and 2500-30000 rpm is used to
6 measure the speed of a shaft which is believed to Apply c
be in the vicinity of 3000 rpm. What range setting
should be tried and why?
List any three mechanical tachometers used for
7 measuring angular velocity and briefly explain Apply a
them with suitable diagrams
Explain the working of elementary accelerometers
8 like i. Vibrating wedge ii. Cantilever.Describe Apply b
how vibrations are measured by each
9 Types of tachometers with their neat sketch? Apply c
10 Explain different types of tachometers? Apply c
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VI
Tutorials
Answer Questions
Classify the electrical strain gauges. Explain the Understand
1 construction and working of atleast one with a d
neat sketch
What is a rectangular Rosette? Explain it with neat Understand
2 a
diagram
What is the temperature compensation with Understand
3 a
respect to strain gauges?
Explain how an unbonded strain gauge is used to Understand
4 c
measure strain?
List the essential characteristics required for the Understand
5 c
backing material of a bonded strain gauge.
If a strain gauge has a low gauge factor, what does Understand
6 c
it indicate?
A 200 Ω strain gauge is bonded to a steel bar Understand
which is subjected to a tensile load. Cross
sectional area of the bar is 0:9 x 10-4m2 and E=
7 a
200GN/m2.If load of 100 kN produces a change of
1.5Ω in the gauge resistance. Determine the gauge
factor of the gauge.
8 Name the various types of strain gauges for Understand b
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 181
Dept. of MECH
different applications
What are the advantages and disadvantages of Understand
9 mechanical strain gauges over optical strain c
gauges.
Explain types of strain measurements Understand
10 c
instruments?
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VII
Tutorials
Answer Questions
1 How absolute humidity is measured? Understand d
What are load cells? Name the application of load cells.
2 How does a mechanical load cell work? a
Explain the principle of measuring torque using strain Understand
3 a
gauge torsion meter
4 How is dew point temperature measured? Understand c
What are the driving dynamometers? Explain any one of Understand
5 c
them.
With neat sketch, explain the working principle of Understand
6 c
Mechanical humidity sensing absorption hygrometer
Write the basic principle on which a pendulum scales Understand
7 a
work? Briefly discuss on Pendulum scale.
8 What are the hygroscopic materials? Give examples Understand b
With neat sketch, explain the working principle of Understand
9 c
Pneumatic Load cell
10 Explain types humidity measurement instruments? Understand c
Blooms
Questions Course
Sl.no. Taxonomy Outcome
Level
UNIT-VIII
Tutorials
Answer Questions
What is a open loop system? Explain the various
1 understand d
elements of it with a block diagram.
What are the servo mechanisms? Explain basic parts
2 Understand a
of it with a block diagram
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 182
Dept. of MECH
What are the requirements of control systems? The
operation of driver driving an automobile on the road
3 Understand a
and identify the components, input and output of the
human system.
Describe typical closed-loop control systems that can
be used in order to control the temperature of water
4 being heated by steam, and Draw the block diagram Apply c
of the arrangement and mention the use of feed back
in application.
Distinguish between Manual control system and
5 Understand c
Automatic control systems
Describe with neat sketch the closed loop speed
6 Apply c
control system.
Explain with neat block diagram of closed loop
7 Apply a
positioned system.
8 Classify feedback control systems and explain them. problem b
A constant water level is to be maintained in a boiler.
9 Suggest a suitableautomatic level control system with Understand c
a block diagram and explain its working.
10 Difference between open and closed loop system? Understand c
12. 13 ASSIGNMENT QUESTIONS:
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-I
Assignments
Short Answer Questions
Draw the block diagram of a generalized measurement system and
1 Evaluate e
explain various elements of it?
Explain the dynamic response characteristics of first order
2 Remember a
instruments to step, ramp andsinusoidal inputs.
Distinguish between direct and indirect methods of measurement with
3 Understand a
suitable examples.
What are desired, modifying and interfering inputs for an
instrumentation system? How do you correct the effects of
4 Evaluate e
modifying and interfering inputs by the method of signal filtering ?
Explain by means of suitable examples.
Explain the important static characteristics.
5 Evaluate e
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 183
Dept. of MECH
Explain the following functional blocks by means of examples.
i. Variable conversion element
6 Remember a
ii. Data manipulation element iii. Data transmission
element
What standard inputs are considered for obtaining dynamic
7 Understand a
characteristics of measurement systems? Plot the signals.
Briefly explain the reasons for systematic errors in measurement
8 Analysis b
systems.
9 Classification of measurement instruments? Understand b
10 Explain mechanical instruments? Analysis b
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-II
Assignments
Short Answer Questions
What are the desirable properties of Piezoelectric
1 materials? Mention few piezoelectric materials. Evaluate e
Explain the working of a total radiation pyrometer with a neat
2 Remember a
sketch. State its advantages anddisadvantages.
Explain by means of neat sketches, the working of
3 thermocouples. What is ambient temperature Understand a
compensation?
By means of neat sketches, explain the working of a RTD
4 Evaluate e
thermometer. Why protection is needed for the sensing element?
Explain in detail with neat sketches.
(a) Liquid level measurement using Capacitive
5 transducer Evaluate e
(b) Sight glass level indicator
(c) Bubbler level indicator. [6+4+6]
Explain by means of neat sketches, the working of
6 thermocouples. What is ambient temperature Remember a
compensation?
7 Classify inductive transducers. Understand a
Explain the working of LVDT by means of neat
8 sketches. Analysis b
Derive an expression for time response of first order system to
step input. A thermometer having a time Constant of 5s is
9 o Understand b
quickly inserted in a bath of temperature 80 C, what would
be the indication after 2.5 sec.
10 Explain mechanical instruments? Analysis b
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 184
Dept. of MECH
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-III
Assignments
Short Answer Questions
What is a Diaphragm gauge? Explain its construction,
1 working with a neat sketch. Understand a
Explain the construction and working principle of the McLeod pressure
2 Remember a
gauge with a neat diagram.
What is the basic principle in thermal conductivity gauge? Explain the
3 Understand a
working principle of thermal couple type conductivity gauge
Explain the working principle of Pirani thermal
4 Evaluate e
conductivity gaguge
Explain how sensitivity can be increased by using
5 inclined tube manometer. Describe its construction, Evaluate e
advantages and limitations
Explain the basic principle of working of a bellow type
6 Remember a
pressure
How do you measure the pressure with the help of U-
7 tube Understand a
manometer andMicro manometer
A McLeod gauge having V = 200cm3 and a capillary diameter of 2 mm is
8 used to measure the gas pressure. What will be the pressure of gas
Analysis b
corresponding to a capillary reading of 4cm?
9 Types of speed measueremt instruments? Understand b
10 Explain mechanical tachometer devicesd? Analysis b
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-IV
Assignments
Short Answer Questions
Sketch and working of a capacitive type level gauge. Show that
1
level is directly proportional to the Capacitance measured. Understand a
Explain construction, working and applications of ultrasonic flow
2 meter with suitable diagram. Remember a
3 Describe in detail with neat sketches Float operated RheostatUnderstand a
Describe in detail with neat sketches Hook Level
4 Evaluate e
indicator
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 185
Dept. of MECH
Enumerate the principle of operation, construction
5 Evaluate e
details, advantages and limitations of Rotameter.
List out the advantages and disadvantages of In direct
6 method Remember a
level measurement
Explain how a wire mounted normal to probe axis", type hot wire
7 anemometer is used in flow measurement. Enumerate the principle of
Understand a
operation and its limitations.
Explain with a neat sketch, the principle of operation of various solid
8 Analysis b
level indicators
Describe in detail with neat sketches Turbine Flow
9 meter Understand b
10 List out the important of calibration of flow measuring Analysis b
instruments
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-V
Assignments
Short Answer Questions
State the advantages and disadvantages of electrical
1 tachometers. apply a
Explain construction, working of stroboscope with
2 suitable diagram. apply a
Explain the construction, principle of working and
3 advantages and disadvantages of LVDT accelerometer apply a
Describe the functioning of a stroboscope and describe
4 and explain how speed of a rotating shaft can be e
measured using a single pattern and multi pattern disc apply
Explain the construction, principle of working and
5 advantages of Capacitance vibration sensor e
accelerometers apply
A centrifugal tachometer having range 25-300, 250-
3000, and 2500-30000 rpm is used to measure the speed
6 a
of a shaft which is believed to be in the vicinity of 3000
rpm. What range setting should be tried and why? apply
List any three mechanical tachometers used for measuring angular
7 a
velocity and briefly explain them with suitable diagrams apply
Explain the working of elementary accelerometers like i. Vibrating wedge
8 a
ii. Cantilever.Describe how vibrations are measured by each apply
9 Explain different tachometers? apply a
10 Explain electrical tachometers? apply b
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 186
Dept. of MECH
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VI
Assignments
Short Answer Questions
Classify the electrical strain gauges. Explain the
1 construction and working of atleast one with a neat a
sketch
Understand
2 What is a rectangular Rosette? Explain it with neat Remember a
diagram.
3 What is the temperature compensation with respect to Understand b
strain gauges?
4 Explain how an unbonded strain gauge is used to Evaluate a
measure strain?
5 List the essential characteristics required for the backing Evaluate a
material of a bonded strain gauge.
6 If a strain gauge has a low gauge factor, what does it Remember b
indicate?
A 200 Ω strain gauge is bonded to a steel bar which is
subjected to a tensile load. Cross sectional area of the bar
7 is 0:9 x 10-4m2 and E= 200GN/m2.If load of 100 kN Understand a
produces a change of 1.5Ω in the gauge resistance.
Determine the gauge factor of the gauge.
8 Name the various types of strain gauges for different Analysis a
applications.
9 What are the advantages and disadvantages of Understand b
mechanical strain gauges over optical strain gauges.
10 Different types of strain measurement instruments? Analysis a
Questions Blooms
Course
Sl.No. Taxonomy
Outcome
Level
UNIT-VII
Assignments
Short Answer Questions
1 How absolute humidity is measured? Understand a
What are load cells? Name the application of load cells.
2 How does a mechanical load cell work? Remember a
.
3 Explain the principle of measuring torque using strain Understand a
gauge torsion meter.
4 How is dew point temperature measured? Evaluate e
5 What are the driving dynamometers? Explain any one of Evaluate e
them.
6 With neat sketch, explain the working principle of Remember a
Mechanical humidity sensing absorption hygrometer.
7 Write the basic principle on which a pendulum scales Understand a
work? Briefly discuss on Pendulum scale.
8 What are the hygroscopic materials? Give examples. Analysis b
With neat sketch, explain the working principle of
9 Understand b
Pneumatic Load cell
10 Types of humidity measurement devices? Analysis b
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 187
Dept. of MECH
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VIII
Assignments
Short Answer Questions
What is a open loop system? Explain the various Understand
1
elements of it with a block diagram. a
2 What are the servo mechanisms? Explain basic parts of it Understand a
with a block diagram..
What are the requirements of control systems? The Apply
3 operation of driver driving an automobile on the road a
and identify the components, input and output of the
human system.
Describe typical closed-loop control systems that can be Understand
used in order to control the temperature of water being
4 heated by steam, and Draw the block diagram of the e
arrangement and mention the use of feed back in
application.
5 Distinguish between Manual control system and Apply e
Automatic control systems
6 Describe with neat sketch the closed loop speed control a
system.
Explain with neat block diagram of closed loop problem
7 positioned system. a
8 Classify feedback control systems and explain them. Understand b
A constant water level is to be maintained in a boiler.
9 Suggest a suitableautomatic level control system with a b
block diagram and explain its working. Understand
10 Difference between open and closed loop systems? b
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 188
Dept. of MECH
13.0 ROBOTICS (57026)
13.1 COURSE DESCRIPTION:
Course Code 57026
Course Title ROBOTICS
Course Structure Lectures Tutorials Practicals Credits
5 1 - 4
Course Coordinator M.Anil Kumar, Asst.Professor
Team of Instructors M.Anil Kumar, K.Kartheek Reddy
COURSE OVERVIEW:
Robotics is the branch of technology that deals with the design, construction, operation,
and application of robot as well as computer systems for their control, sensory feedback,
and information processing. These technologies deal with automated machines that can
take the place of humans in dangerous environments or manufacturing processes, or
resemble humans in appearance, behavior, and/or cognition. Many of today's robots are
inspired by nature contributing to the field of bio-inspired robotics.
13.2 PREREQUISITES:
Level Credits Periods/Weeks Prerequisites
Machine drawing
UG 4 5 Design of machine members
Dynamics of machinery
13.3 MARKS DISTRIBUTIONS:
University End Total
Session Marks (25M)
Exam Marks Marks
Continuous Assessment Tests (Midterm tests):
There shall be 2 midterm examinations. Each midterm
examination consists of one objective paper, one
subjective paper and four assignments. The objective
paper is for 10 marks and subjective paper is for 10
marks, with duration of 1 hour 20 minutes (20 minutes for
75 100
objective and 60 minutes for subjective paper).
Objective paper is set for 20 bits of – multiple choice
questions, fill-in the blanks, 10 marks. Subjective paper
contains of 4 full questions (one from each unit) of
which, the student has to answer 2 questions, each
question carrying 5 marks. First midterm examination
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 189
Dept. of MECH
shall be conducted for 4 units of syllabus and second
midterm examination shall be conducted for another 4
units. 5 marks are allocated for Assignments. First four
assignments should be submitted before the conduct of the
first mid, and the second four assignments should be
submitted before the conduct of the second mid. The total
marks secured by the student in each midterm
examination are evaluated for 25 marks, and the average
of the two midterm examinations shall be taken as the
final marks secured by each candidate.
13.4 EVALUATION SCHEME:
S. No Component Duration Marks
1 I Mid Examination 1 hour and 20 min 20
2 I Assignment 5
3 II Mid Examination 1 hour and 20 min 20
4 II Assignment 5
MID Examination marks to be considered as average of above 2
MID’s
5 External Examination 3 hours 75
Total 75
COURSE OBJECTIVES:
1. Classify different types of automation.
2. Analyze the automated flow line for quality product.
3. Understand the importance of line balancing in an automated assembly lines
4. Familiarize with the concepts of robotization
5. Apply kinematic and dynamic analysis to the given robotic structure.
6. Plan the robot trajectory for a given application.
7. Differentiate the drives and sensors required in any robotic application.
8. Understand the wide range of robotic applications in manufacturing sector.
13.5 COURSE OUTCOMES:
1. An ability to understand the basics in the robot motion analysis.
2. An Ability to Calculate analytically the forces and other parameter associated with
robot .
3. An Ability To Know the various methods in kinematics manipulator.
4. An ability To Understand the importance of dynamics in robot manipulator.
5. An ability to Understands operation of robot and trajectory planning and robot
actuators and feedback components
6.an ability to understand the applications of robots in manufacturing.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 190
Dept. of MECH
13.6 HOW PROGRAM OUTCOMES ARE ASSESSED:
Proficiency
Program Outcomes Level
assessed by
An ability to apply knowledge of computing,
mathematical foundations, algorithmic principles, and Assignments
computer science and engineering theory in the Midterm and
a H
modeling and design of computer-based systems to real- University
world problems (fundamental engineering analysis examinations
skills)
Assignments
An ability to design and conduct experiments, as well as
Midterm and
b to analyze and interpret data (information retrieval H
University
skills)
examinations
An ability to design , implement, and evaluate a
computer-based system, process, component, or Assignments
program to meet desired needs, within realistic Midterm and
c S
constraints such as economic, environmental, social, University
political, health and safety, manufacturability, and examinations
sustainability (Creative Skills)
An ability to function effectively on multi-disciplinary
d N --
teams (team work)
An ability to analyze a problem, identify, formulate and Assignments
use the appropriate computing and engineering Midterm and
e H
requirements for obtaining its solution (engineering University
problem solving skills) examinations
An understanding of professional, ethical, legal, security
f and social N --
issues and responsibilities (professional integrity)
An ability to communicate effectively both in writing
g and orally N --
(speaking / writing skills)
The broad education necessary to analyze the local and
global impact of computing and engineering solutions
h N --
on individuals, organizations, and society (engineering
impact assessment skills)
Recognition of the need for, and an ability to engage in
Assignments
continuing
Midterm and
i professional development and life-long learning H
University
(continuing
examinations
education awareness)
A Knowledge of contemporary issues (social
j N --
awareness)
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 191
Dept. of MECH
An ability to use current techniques, skills, and tools
necessary for
k computing and engineering practice (practical N --
engineering analysis
skills)
Assignments
An ability to apply design and development principles
Midterm and
l in the construction of software and hardware systems of S
University
varying complexity (software hardware interface)
examinations
An ability to recognize the importance of professional
development by pursuing postgraduate studies or face
m competitive examinations that offer challenging and N --
rewarding careers in computing (successful career and
immediate employment).
N=None S=Supportive H=Highly Related
13.7 JNTUH SYLLABUS:
UNIT – I
INTRODUCTION. Automation and Robotics. An Over view of Robotics. Classification
by coordinate system and control systems. Components of the Industrial robotics: Degrees
of freedom-end effectors: Mechanical gripper. Magnetic. Vacuum and other types of
grippers. General consideration on gripper selection and design
UNIT –II
Motion Analysis: Basic rotation matrices. Composite rotation matrices. Euler Angles.
Equivalent angle and Axis. Homogeneous transformation. Problems.
UNIT –III
Manipulator Kinematics : D-H notations. Joint coordinates and world coordinates.
Forward and inverse kinematics. Problems.
UNIT –IV
Differential kinematics: Differential kinematics of planar and spherical manipulators.
Jacobians. Problems.
UNIT –V
Robot Dynamics: Lagrange- Euler formulations. Newton-Euler formulations. Problems
on planar two link manipulators.
UNIT – VI
Trajectory Planning: Joint space scheme. Cubic polynomial fit. Avoidance of obstacles.
Types of motion: Slew motion, Joint interpolated motion, Straight line motion
UNIT-VII
Robot actuators and Feed back components : Actuators: Pneumatic and Hydraulic
actuators,Electric Actuators, DC servo motors, stepper motors. Feedback Components:
Position Sensors, Potentiometers. Resolves and encoders
UNIT-VIII
Robot Application in Manufacturing: Material handling. Assembly and Inspection.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 192
Dept. of MECH
TEXT BOOKS:
T1: Industrial Robotics / Groover M P/Pearson Edu.
T2: Introduction to Robotic Mechanics and Control by JJ Craig, Pearson,3rd edition.
REFERENCE BOOKS:
R1: Robotics and Control / Mittal RK & Nagrath I J/TMH
13.8 COURSE PLAN:
At the end of the course, the students are able to achieve the following Course Learning
Outcomes.
Lecture. Course Learning
Topics to be covered Reference
No. Outcomes
What is the main role of Automation and Robotics.
1 ROBOTICS in modern T1&R1
industry?
An ability to understand An Over view of Robotics.
2 the basic knowledge on T1,T2&R1
robotics
Classification of Classification by coordinate system
3 T1&R1
robotics and control systems.
Industrial robotics Components of the Industrial
4 components robotics: Degrees of freedom-end T1,T2&R1
effectors:
An ability to understand Mechanical gripper
5 about mechanical T1,T2&R1
gripper
An ability to understand Magnetic gripper
6 T1,T2&R1
about magnetic gripper
An ability to understand Vacuum and other types of
7 about vaccum and other grippers. T1,T2&R1
types
Design considerations in General consideration on gripper
8 gripper design and selection and design T1,T2&R1
selection
An ability to understand
9 about motion in a Motion Analysis in a robot T1&R1
Industrial robot
To analyze basic Basic rotation matrices:2D,3D
10 rotation about x axis y T1&R1
axis and z axis
An ability to understand Composite rotation matrices
11 about composite rotation T1,T2&R1
matrices
Evaluate a robot by Euler Angles
12 T1&R1
using Euler angles
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 193
Dept. of MECH
An ability to understand Equivalent angle and Axis
13 about Equivalent angle matrices T1T2&R1
and Axis matrices
Equivalent angle and Homogeneous transformation
Axis matrices matrices
14 T1&R1
homogeneous matrices
application
Evaluate a process for Problems on basic rotation
15 solving basic rotation matrices T1&R1
matrices
Evaluate a process for Problems on homogeneous
16 solving homogeneous rotation matrices T1&R1
rotation matrices
Bsic knowledge on
17 Manipulator Kinematics T1&R1
manipulator kinematics
Basic knowledge on Manipulator Kinematics : D-H
18 manipulator kinematics notations. T1&R1
D-H notations.
An ability to understand Joint coordinates and world
about coordinates.
19 T1&R1
Joint coordinates and
world coordinates.
An ability to understand Forward kinematics.
20 about T1&R1
Forward Kinematics.
An ability to understand Inverse kinematics
21 about T1&R1
Inverse kinematics
An ability to understand Difference between forward
about analysis and inverse analysis
22 Difference between T1&R1
forward analysis and
inverse analysis
Evaluate a process for Problems on forward analysis and
solving forward inverse analysis.
23 T1&R1
analysis and inverse
analysis.
Evaluate a process for Problems on manipulator
solving kinematics
24 T1,T2&R1
Problems on
manipulator kinematics
An ability to understand Differential kinematics of planar
about manipulator Advantages
25 T1&R1
Differential kinematics &Applications
of planar manipulator
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 194
Dept. of MECH
Advantages
&Applications
An ability to understand
about
Differential kinematics Differential kinematics of
26 of spherical spherical manipulators T1&R1
manipulators applications and advantages
applications and
advantages
An ability to understand Jacobian matrices in manipulators
about
27 Jacobian matrices in T1&R1
manipulators
An ability to understand
about
28 Advantages &Applications T1,T2&R1
Advantages
&Applications
An ability to understand Newton-Euler formulations.
about
29 Newton-Euler T1&R1
formulations.
Evaluate a process for Problems on planar two link
solving manipulators.
30 T1&R1
Problems on planar two
link manipulators.
Evaluate a process for Problems on spherical
solving manipulators
31 T1&R1
Problems on spherical
manipulators
Evaluate a process for
solving Problems on joint jacobian
32 T1&R1
Problems on joint matrices
jacobian matrices
An ability to understand Robot Dynamics
about
33 T1,T2&R1
Robot Dynamics
An ability to understand
about
34 Lagrange- Euler formulations T1&R1
Lagrange- Euler
formulations
An ability to understand Difference between Lagrange-
35 T1&R1
about Euler formulations & Newton-
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 195
Dept. of MECH
Difference between Euler formulations
Lagrange- Euler
formulations & Newton-
Euler formulations
Evaluate a process for Problems on Lagrange- Euler
solving formulations Newton-Euler
Problems on Lagrange- formulations
36 T1,T2&R1
Euler formulations
Newton-Euler
formulations
Evaluate a process for
solving Problems on Newton-Euler
37 T1,T2&R1
Problems on Newton- formulations
Euler formulations
Evaluate a process for Problems on planar two link
solving manipulators
38 T1&R1
Problems on planar two
link manipulators
Evaluate a process for Problems on Lagrange-newton
solving Problems on Euler formulations on planar two
39 Lagrange-newton Euler link manipulators T1,T2&R1
formulations on planar
two link manipulators
An ability to understand Trajectory planning,point to point
about motion analysis
40 Trajectory T1&R1
planning,point to point
motion analysis
An ability to understand Trajectory Planning: Joint space
41 about scheme. T1&R1
An ability to understand Cubic polynomial fit.
42 about T1&R1
Cubic polynomial fit.
An ability to understand Avoidance of obstacles.
43 about T1&R1
Avoidance of obstacles.
An ability to understand Types of motion: Slew motion
about
44 T1,T&R1
Types of motion: Slew
motion
An ability to understand Joint interpolated motion
about
45 T1&R1
Joint interpolated
motion,
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 196
Dept. of MECH
An ability to understand Straight line motion
46 about T1&R1
Straight line motion
An ability to understand Trajectory Planning: Joint space
about scheme
47 T1&R1
Trajectory Planning:
Joint space scheme
An ability to understand DC servo motors,
48 about T1&R1
DC servo motors,
An ability to understand stepper motors
49 about T1&R1
stepper motors
An ability to understand Feedback components:Types of
about sensors
50 Feedback T1&R1
components:Types of
sensors
An ability to understand Tacticle sensors, position sensors
about
51 T1&R1
Tacticle sensors,
position sensors
An ability to understand Potentiometers
52 about T1&R1
Potentiometers
An ability to understand Resolvers and encoders
53 about T1&R1
Resolvers and encoders
An ability to understand
about Applications of robots in
54 T1&R1
Applications of robots in manufacturing
manufacturing
An ability to understand Robots in spot welding and arc
about welding
55 T1&R1
Robots in spot welding
and arc welding
An ability to understand Robot spray coating and grinding.
about
56 T1&R1
Robot spray coating and
grinding.
An ability to understand Application of robots in machining
about operations
57 T1&R1
Application of robots in
machining operations
58 An ability to understand Robot Application in Material T1&R1
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 197
Dept. of MECH
about handling Assembly and Inspection
Robot Application in
Material handling
Assembly and
Inspection
An ability to understand Robot Application in chemical
about industries
59 T1&R1
Robot Application in
chemical industries
An ability to understand Other Applications of robots
about
60 T1&R1
Other Applications of
robots
T1: Industrial Robotics / Groover M P/Pearson Edu.
T2. Production Technology by H.M.T. (Hindustan ROBOTICS).
R1. ROBOTICS–C.Elanchezhian and M. Vijayan / Anuradha Agencies Publishers.
R2. Principles of ROBOTICS/ Bhattacharya A and Sen.G.C./New central Book Agency.
R3. Fundamentals of Metal Machining and ROBOTICS/ Geofrey Boothroyd/McGraw
Hill.
13.9 MAPPING COURSE OBJECTIVES LEADING TO THE ACHIEVEMENT
OF PROGRAM OUTCOMES:
Program Outcomes
a b c d e f g h i j k l m
I H S
II H
III H S
IV H S
V S S
S= Supportive H=Highly Relative
13.10 MAPPING COURSE OUTCOMES LEADING TO THE ACHIEVEMENT
OF PROGRAM OUTCOMES:
Program Outcomes
a b c d e f g h i j k l m
1 H H
2 H S H
3 H S H
4 S H
5 H H
S= Supportive H=Highly Relative
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 198
Dept. of MECH
13.11 OBJECTIVE QUESTIONS:
UNIT-I
1. Based on finger movement, Mechanical gripper can be classified as __________ [C]
(a) pivoting movement
(b) linear or translational movement
(c) a & b
(d) none
2. A Spherical coordinate robot should have ________ joints [C]
(a) one revolute and two prismatic (b) three prismatic
(c) two revolute and one prismatic (d) a,b& c
3. Based on the coordinate system robots can be classified as_________ robots. [D]
(a) Cartesian (b) Spherical
(c) Cylindrical (d) a,b& c
4).A manipulator with 6 DOF is ______________ [ D]
(a) 1-D Manipulator (b)2-D Manipulator
(c) 3-D Manipulator (d) Spatial Manipulator
5. Technology that is concerned with the use of mechanical, electronic and computer
based systems in the operation and control of production [B]
(a) Mechanization (b)Automation
(c) Industrialization. (d)all the above.
6. Use of machines to do the work of animals/people [D]
(a) Mechanization (b)Automation
(c) Industrialization. (d) all the above.
7.__________ Robot comes under type of automation. [B]
(a) programmable (b) Flexible
(c) Fixed (d). (a) & (b)
8. Following is the work transfer mechanism in an automated flow line [ B]
(a) walking beam transfer bar mechanism (b)Powered roller conveyor system
(c) chain drive conveyor system (d)Any of the above
9. number of buufers in an n – staged line [ C]
(a) n (b) n-1
( c) n+1 (d)1/n 6.
10. Work station continue to operate with no part to work on” is called… …….. [C ]
(a)blocking of stations ( b) idling of stations
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 199
Dept. of MECH
(c)starving of stations (d) any of the above.
11. The following is the performance measure of line efficiency [D]
(a)cost per item (b)Average production rate
(c) proportion of down time (d)All the above
12. Following is the mechanical fastener [D]
( a)threaded fastener (b)Rivet
(c) press fit (d) All the above
13. Following are the constraints in the line balancing problem [A]
(a) Precedence constraints (b) zoning constraints
(c) position constraints (d) All the above
14. Graphical representation of the sequence of work elements as defined by the
precedence constraints [A]
(a) Flow diagram (b) Network diagram
(c) precedence diagram (d)all the above.
15. Following method improves the balance of the line………………. [ D]
(a) dividing work elements (b)Methods analysis
(c) parallel stations (d)All the above.
16. The attractive feature of SCARA robot [C]
(a) more tolerance (b) Selective compliance
(c) Accuracy (d) Repeatability
17. the robot configuration, which is used in high reach applications [B ]
(a) polar (b) jointed arm
(c) Spherical (d) (a) & (b).
18. Interface between the last link of the manipulator and the end effectors is called [ B]
(a) critical joint (b) Gripper
(c) Wrist (d) Tool flange / too mounting plate.
19. The device which is used to interpret the data stored in a memory of a robot. [B]
(a)sensor (b) controller
(c) Sequencer (d) Synchronizer.
20. Number degrees of freedom exhibited by robot wrist [C]
(a) 1 (b) 2
(c)3 (d) 4
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 200
Dept. of MECH
UNIT II
1. If the orientation changes without the change of position then the transformation is ___
[B]
(a) pure translation (b) pure rotation
(c) Combined transformation (d) none
2. If the orientation changes without the change of position then the transformation is ___
[ B]
(a) Pure translation (b) pure rotation
(c) Combined transformation (d)none
3. ____________ can be considered as Differential motions of a frame. [D]
(a) Differential translations (b) differential rotations
(c) Differential transformations (d) a, b, & c
4. The matrix representing the Euler angles orientation change is ________ [A]
(a) Rot(a,)Rot(o,Rot(a,ψθφ (b) Rot(o,θ)
(c)Rot(a,)Rot(a,Rot(o,ψφθ (d) none
5. Following is the robotic like device. [D]
(a) Telecherics ( b) exo-skeleton
(c) locomotive device (d) all the above
6. Number of linear co-ordinates in a cylindrical co-ordinate robot. [A]
(a) 2 (b) 3
(c) 1 (d) 0 45.
7. Work volume of a spherical robot [C]
(a) cylinder (b) paraboloid
(c) sphere (d) cube
8. Wrist motions of the robot among the following. [D]
(a) yaw (b) pitch
( c) roll (d) all the above
9. The attractive feature of SCARA robot [C]
(a) more tolerance (b) Selective compliance
(c) Accuracy (d) Repeatability
10.. Type of control used in Cartesian robot. [A]
(a) servo (b) non-servo
( c)pneumatic (d) hydraulic
11. ……………….type of robot uses feed back from the control system [B]
(a) non-servo (b) servo
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 201
Dept. of MECH
(c)(a) & (b) (d) Pneumatic
12. Type of robot used in spray painting applications [D]
(a) Point to point (b) bang-bang
(c) End point (d) continuous path
13. Jacobian relates the velocities of joints to the velocities of ………………. [B ]
(a)Tool point (b) Manipulator
(c) Joint ( d)None of the above.
14. If A- is a non-singular square matrix, then A -I = ………………. [A ]
(a) adjA X detA (b) adj A + detA
(c) adjA ÷ detA (d)detA ÷ adjA
15.The relation between Lagrangian function (L), total kinetic energy (K) and total
potential energy of a mechanical system is ____________ [ A]
(a) L=K-P (b) L=K+P
(c) L=K/P (d) L=P/K
16. As the complexity of the system increases, the __________ method becomes
relatively simpler to use. [B]
(a) Newtonian- Euler (b) Lagrangian-Euler
(c) a&b (d) none
17. Lagrangian Function L= f( Kinetic Energy, Potential Energy )=………… [ B]
(a) KE + PE (b) KE – PE
(c) KE ÷ PE (d) PE ÷KE
18. Measure of mass distribution…………………….. [D]
(a)Radius of gyration (b)acceleration
(c) moment of inertia (d) any of the above.
19. Newton – Euler formulation is used to analyze the ……behavior of the manipulator.
[A]
(a) Static (b) Dynamic
(c) Kinematic (d) Kinetic.
20. In Lagrange – Euler Equation [ B]
Where L – Lagrangian function = KE – PE , qi – Generalised co-ordinate
(a) Velocity (V i) (b) Acceleration (a i)
(c) Torque (T i) (d) None of the above
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 202
Dept. of MECH
UNIT-III
1. Using ___________kinematic equations, one can calculate where the robot is at any
instant If all the robot joint variables are known [A ]
(a) inverse (b) forward
(c) a & b (d) none
2. The DOF is also equal to the number of ______ in the open kinematic chain [ B]
(a) Links (b) joints
(c) instantaneous centre (d) None
3. In fixed angle representation, ordering of rotation is from [C ]
(a) top to bottom (b) bottom to top
(c) left to right (d) right to left
4. Wrist motions of the robot among the following. [D]
(a) yaw (b) pitch
( c) roll (d) all the above
5. The attractive feature of SCARA robot [C]
(a) more tolerance (b) Selective compliance
(c) Accuracy (d) Repeatability
6. Type of control used in Cartesian robot. [A]
(a) servo (b) non-servo
( c)pneumatic (d) hydraulic
7.__ space trajectories are computationally extensive, and require a faster processing
time. [B]
(a) Joint (b) Cartesian
(c) a & b (d) none
8. Trajectory planning satisfies………… [D]
(a) Only path constraints ( b)Only path specifications
(c)Only dynamic constraints (d) All the above.
9. An N-joint manipulator will have………….number of trajectories. [B]
(a) N (b) (N+1)
(c)(N-1) (d) (N+2).
10. Q and vector V=ai+bj+ck then (S-V) is……… of Q [B]
(a) Normal (b) conjugate
(c) Reciprocal (d) none of the above
11. Path end points can be specified in………….. [C]
(a) Joint co-ordinates (b) Cartesian co-ordinates
(c) (a) and (b) (d) none of the above
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 203
Dept. of MECH
12. An N-joint manipulator will have………….number of trajectory segments [ c]
(a) 3N (b) 5N
(c) (a) and (b) (d) none of the above
13. Mathematical functions used in trajectory planning problems. [ a]
(a) Fourier (b) Laplace
(c) Polynomial (d) all the above.
14.________ schemes can be used in joint-space trajectory planning. [ c]
(a) Third- order polynomial (b) fifth- order polynomial
(c) a & b (d) none
15.Third-degree polynomial can be used with __________ number of constraints. [d]
(a) 1 (b) 2
(c) 3 (d) 4
16.__ space trajectories are computationally extensive, and require a faster processing
time. [b]
(a) Joint (b) Cartesian
(c) a & b (d) none
17. As the complexity of the system increases, the __________ method becomes
relatively simpler to use. [b]
(a) Newtonian- Euler (b) Lagrangian-Euler
(c) a&b (d) none
18. Lagrangian Function L= f( Kinetic Energy, Potential Energy )=………… [ b]
(a) KE + PE (b) KE – PE
(c) KE ÷ PE (d) PE ÷KE
19. Measure of mass distribution…………………….. [d ]
(a)Radius of gyration (b)acceleration
(c) moment of inertia (d) any of the above.
20. Newton – Euler formulation is used to analyze the ……behavior of the manipulator.
[a]
(a) Static (b) Dynamic
(c) Kinematic (d) Kinetic.
UNIT-IV
1.The relation between Lagrangian function (L), total kinetic energy (K) and total
potential energy of a mechanical system is ____________ [ a]
(a) L=K-P (b) L=K+P
(c) L=K/P (d) L=P/K
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 204
Dept. of MECH
2. As the complexity of the system increases, the __________ method becomes relatively
simpler to use. [b]
(a) Newtonian- Euler (b) Lagrangian-Euler
(c) a&b (d) none
3. Jacobian relates the velocities of joints to the velocities of ………………. [b]
(a)Tool point (b) Manipulator
(c) Joint ( d)None of the above.
4. If A- is a non-singular square matrix, then A -I = ………………. [ a]
(a) adjA X detA (b) adj A + detA
(c) adjA ÷ detA (d)detA ÷ adjA
5. dynamic model of a robotic arm can be studied by [ c]
(a) Newtonian Laws (b)Lagrangian Laws
(c) Eularian Laws (d) all the above.
6. Lagrangian Function L= f( Kinetic Energy, Potential Energy )=………… [ b]
(a) KE + PE (b) KE – PE
(c) KE ÷ PE (d) PE ÷KE
7. Measure of mass distribution…………………….. [d]
(a)Radius of gyration (b)acceleration
(c) moment of inertia (d) any of the above.
8. Newton – Euler formulation is used to analyze the ……behavior of the manipulator.[ a]
(a) Static (b) Dynamic
(c) Kinematic (d) Kinetic.
9. Dynamic equations of motion of robot arm allows [ d]
(a) Analysis (b) Synthesis
(c) Simulation (d)All the above.
10. In Lagrange – Euler Equation [b]
Where L – Lagrangian function = KE – PE , qi – Generalised co-ordinate
(a) Velocity (V i) (b) Acceleration (a i)
(c) Torque (T i) (d) None of the above
11. Newton’s equation gives the relationship between [b]
(a) Torque, mass, jerk (b) Force, mass, acceleration
(c) Power, force, velocity (d). Energy, mass, velocity
12. Differential change in the manipulator can be computed by………………. [c]
(a) Jacobian (b) Inverse Jacobian
(c) Any of the above (d) None of the above.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 205
Dept. of MECH
13. Using ___________kinematic equations, one can calculate where the robot is at any
instant If all the robot joint variables are known [a ]
(a) inverse (b) forward
(c) a & b (d) none
14. The DOF is also equal to the number of ______ in the open kinematic chain [ b]
(a) Links (b) joints
(c) instantaneous centre (d) None
15. In fixed angle representation, ordering of rotation is from [c ]
(a) top to bottom (b) bottom to top
(c) left to right (d) right to left
16. Wrist motions of the robot among the following. [d]
(a) yaw (b) pitch
( c) roll (d) all the above
17. The attractive feature of SCARA robot [c]
(a) more tolerance (b) Selective compliance
(c) Accuracy (d) Repeatability
18. Type of control used in Cartesian robot. [a]
(a) servo (b) non-servo
( c)pneumatic (d) hydraulic
19.__ space trajectories are computationally extensive, and require a faster processing
time.
[ b]
(a) Joint (b) Cartesian
(c) a & b (d) none
20. An N-joint manipulator will have………….number of trajectories. [b]
(a) N (b) (N+1)
(c)(N-1) (d) (N+2).
Unit V
1. If the orientation changes without the change of position then the transformation is ___
[ b]
(a) Pure translation (b) pure rotation
(c) Combined transformation (d)none
2. ____________ can be considered as Differential motions of a frame. [d]
(a) Differential translations (b) differential rotations
(c) Differential transformations (d) a, b, & c
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 206
Dept. of MECH
3. The matrix representing the Euler angles orientation change is ___________ [a ]
(a) Rot(a,)Rot(o,Rot(a,ψθφ (b) Rot(o,θ)
(c)Rot(a,)Rot(a,Rot(o,ψφθ (d) none
4. Following is the robotic like device. [d]
(a) Telecherics ( b) exo-skeleton
(c) locomotive device (d) all the above
5. Number of linear co-ordinates in a cylindrical co-ordinate robot. [a]
(a) 2 (b) 3
(c) 1 (d) 0 45.
6. Type of robot used in spray painting applications [d]
(a) Point to point (b) bang-bang
(c) End point (d) continuous path
7. Jacobian relates the velocities of joints to the velocities of ………………. [b ]
(a)Tool point (b) Manipulator
(c) Joint ( d)None of the above.
8. If A- is a non-singular square matrix, then A -I = ………………. [a ]
(a) adjA X detA (b) adj A + detA
(c) adjA ÷ detA (d)detA ÷ adjA
9.The relation between Lagrangian function (L), total kinetic energy (K) and total
potential energy of a mechanical system is ____________ [ a]
(a) L=K-P (b) L=K+P
(c) L=K/P (d) L=P/K
10. Lagrangian Function L= f( Kinetic Energy, Potential Energy )=………… [ b]
(a) KE + PE (b) KE – PE
(c) KE ÷ PE (d) PE ÷KE
11. Measure of mass distribution…………………….. [d ]
(a)Radius of gyration (b)acceleration
(c) moment of inertia (d) any of the above.
12. Newton – Euler formulation is used to analyze the ……behavior of the manipulator.
[a]
(a) Static (b) Dynamic
(c) Kinematic (d) Kinetic.
13. In Lagrange – Euler Equation [ b]
Where L – Lagrangian function = KE – PE , qi – Generalised co-ordinate
(a) Velocity (V i) (b) Acceleration (a i)
(c) Torque (T i) (d) None of the above
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 207
Dept. of MECH
14. Wrist motions of the robot among the following. [d]
(a) yaw (b) pitch
( c) roll (d) all the above
15. The attractive feature of SCARA robot [c]
(a) more tolerance (b) Selective compliance
(c) Accuracy (d) Repeatability
16. Type of control used in Cartesian robot. [a]
(a) servo (b) non-servo
( c)pneumatic (d) hydraulic
17.__ space trajectories are computationally extensive, and require a faster processing
time. [ b]
(a) Joint (b) Cartesian
(c) a & b (d) none
18. Path end points can be specified in………….. [ c]
(a) Joint co-ordinates (b) Cartesian co-ordinates
(c) (a) and (b) (d) none of the above
19. An N-joint manipulator will have………….number of trajectory segments [ c]
(a) 3N (b) 5N
(c) (a) and (b) (d) none of the above
20. Mathematical functions used in trajectory planning problems. [ a]
(a) Fourier (b) Laplace
(c) Polynomial (d) all the above.
UNIT VI
1.________ schemes can be used in joint-space trajectory planning. [ c]
(a) Third- order polynomial (b) fifth- order polynomial
(c) a & b (d) none
2.Third-degree polynomial can be used with __________ number of constraints.[d]
(a) 1 (b) 2
(c) 3 (d) 4
3.__ space trajectories are computationally extensive, and require a faster processing
time. [ b]
(a) Joint (b) Cartesian
(c) a & b (d) none
4. Trajectory planning satisfies………… [d]
(a) Only path constraints ( b)Only path specifications
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 208
Dept. of MECH
(c)Only dynamic constraints (d) All the above.
5. An N-joint manipulator will have………….number of trajectories. [b]
(a) N (b) (N+1)
(c)(N-1) (d) (N+2).
6. Q and vector V=ai+bj+ck then (S-V) is……… of Q ` [b]
(a) Normal (b) conjugate
(c) Reciprocal (d) none of the above
7. Path end points can be specified in………….. [ c]
(a) Joint co-ordinates (b) Cartesian co-ordinates
(c) (a) and (b) (d) none of the above
8. An N-joint manipulator will have………….number of trajectory segments [ c]
(a) 3N (b) 5N
(c) (a) and (b) (d) none of the above
9. Mathematical functions used in trajectory planning problems. [ a]
(a) Fourier (b) Laplace
(c) Polynomial (d) all the above.
9. Methods used in straight line trajectory planning. [ a]
(a) Cartesian path control (b) bounded deviation joint path
(c) (a) and (b) (d) none of the above
10. Product of two quaternion is a [ c]
(a) Scalar (b) vector
(c) Quaternion (d) none of the above
UNIT VII
1. Pneumatic actuators have the following characteristic/s _______ [ a]
(a) low compliance (b) high accuracy
(c) high stiffness (d) works at very high pressure
2._______ are the muscles of a robot [ c]
(a) sensor (b) manipulator
(c) actuator (d) Reservoir
3._________ actuating systems have the highest power-to-weight ratio. [ a]
(a) hydraulic (b) pneumatic
(c) electric (d) a, b, & c
4.Type of actuator used in robot to move sizable loads [a ]
(a) hydraulic ( b)pneumatic
(c)electrical (d) mechanical
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 209
Dept. of MECH
5. Type of actuator used in PICK and PLACE robot. [c ]
(a)hydraulic ( b) pneumatic
(c) electrical (d) mechanical hydraulic
6. Stepper motor works based on the principle of [ b]
(a) Minimum reluctance ( b)Maximum reluctance
(c)Minimum resistance (d) Maximum resistance
7. Path end points can be specified in………….. [c]
(a) Joint co-ordinates (b) Cartesian co-ordinates
(c) (a) and (b) (d) none of the above
8. Mathematical functions used in trajectory planning problems. [ c]
(a) Fourier (b) laplace
(c)polynomial (d) all the above.
9. Product of two quaternion is a [c ]
(a) scalar (b)vector
(c) quaternion (d)none of the above
10. Characteristic of Pneumatic actuator [ b]
(a) under damped applications (b)fast movements
(c) accurate movements (d) all the above
11. In Inertia Sensor. all the elements are……………….. [ b]
(a) Zeros (b) Zeros Except diagonal elements
(c) Ones (d) Can’t say
12. The intelligence which is required to control the manipulator will be provided by [b ]
(a) sensor (b) controller
(c) Sequencer (d) Synchronizer.
13. Magnetic gripper is used only for........ materials. [c ]
(a) stainless steel ( b) non-ferrous
(c)ferrous ( d) plastic
14. "Only one surface required to grasp or hold the object" by [ b]
(a) vacuum gripper (b) magnetic gripper
(c) adhesive gripper (d) any of the above.
15. The attractive feature of SCARA robot [c]
(a) more tolerance (b) Selective compliance
(c) Accuracy (d) Repeatability
16. Type of control used in Cartesian robot. [a]
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 210
Dept. of MECH
(a) servo (b) non-servo
( c)pneumatic (d) hydraulic
17. ……………….type of robot uses feed back from the control system [b]
(a) non-servo (b) servo
(c)(a) & (b) (d) Pneumatic
18. Type of robot used in spray painting applications [d]
(a) Point to point (b) bang-bang
(c) End point (d) continuous path
19. SCARA robot is used in ..... applications. [b]
(a)quality control (b)assembly
(c) Defense (d) all the above.
20. Type of robot used in spray painting applications [d]
(a) Point to point (b) bang-bang
(c) End point (d) continuous path
UNIT VIII
1. Robot can be used in the field of _________. [d]
(a)welding (b) painting
(c) Assembly operation (d) a, b, & c
2. Robot can be used in conditions _______ [d ]
(a) Hazardous environment (b) where work is repetitive
(c) Where high accuracy is necessary (d) a, b, & c
3. Type of robot used in spot-welding applications. [ a]
(a) Point to point (b) sequential
(c) End point (d)continuous path
4. Type of drive used for larger robots [d ]
(a) Electrical (b) mechanical
(c) Pneumatic (d) hydraulic
5. Type of power used in robot for precision work applications [a]
(a) Electrical (b) mechanical
(c) Pneumatic (d) hydraulic
6. Smallest increment of the movement into which the robot can divide its work volume
[b]
(a) Control resolution (b) spatial resolution
(c) Repeatability (d) accuracy
7. SCARA robot is used in ..... Applications. [b]
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 211
Dept. of MECH
(a)quality control (b)assembly
(c) Defense (d) all the above.
8. Type of robot used in spray painting applications [d]
(a) Point to point (b) bang-bang
(c) End point (d) continuous path
9. Type of robotic like device used in undersea applications [d]
(a)Telecherics (b) exo-skeleton
(c) Locomotive device (d) prosthesis
10. The shape of work volume of a cylindrical robot is.... [c]
(a) Parabolic ( b) sphere
(c) Cylinder ( d) cube
11. Number of polar co-ordinates in a jointed arm configuration [b]
(a) 2 (b)3
(c) 1 (d) 0
12. Type of robot used in grinding applications. [d]
(a) Point to point (b) bang-bang
(c) End point (d) continuous path
13. The technical name of a hand attached to the wrist of the robot [b]
(a) gripper (b) end effector
(c) Joint (d) any of the above
14. The arm and the body joints of the manipulator are used to .......... the end effectors
[d]
(a) Orient (b) position
(c) Shake (d) any of the above.
15. The robot configuration, which is used in high reach applications [b]
(a) Polar (b) jointed arm
(c)Spherical (d) (a) & (b).
16. High repeatability applications of Cartesian configurations is due to ...[b]
(a) linear joints (b) high stiffness of links
(c) its rigid structure (d) all the above
17. "piston movement inside the engine cylinder" is ......... type of joint. [a]
(a) prismatic (b) rotational
( c) twisting (d) revolving
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 212
Dept. of MECH
18. Interface between the last link of the manipulator and the end effector is called [b]
(a) critical joint (b) Gripper
(c) Wrist (d) Tool flange / too mounting plate.
19. The intelligence which is required to control the manipulator will be provided by [b]
(a) sensor (b) controller
(c) Sequencer (d). Synchronizer
20. The device which is used to hold or grasp the object [c]
(a) end effector ( b) gripper
(c) (a) or (b) ( d) none of the above
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 213
Dept. of MECH
13. 12 TUTORIAL QUESTIONS:
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-I
Short Answer Questions
Tutorials Questions
1 Explain automation Knowledge a
2 Explain robotics Knowledge b
3 Evaluate different types of robot configurations Analysis e
4 Expalin different types of robot drive systems comprehension c
5 Explain different types of robot applications comprehension a
6 Explain different types of robot control system Knowledge a
7 Explain open loop control system Knowledge a
8 Explain closed loop control system Analysis a
9 Design a 2r manipulator Analysis a
10 Explain different types of sensors Knowledge b
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-I
Long Answer Questions
Tutorials Questions
Explain the advantages and disadvantages of
1 magnetic grippers? Explain the two categories of Knowledge a
magnetic grippers
Explain the degrees of freedom of a robot with
2 Knowledge b
sketches.
Explain the difference between hard automation,
3 Analysis e
flexible automation and robotics
Explain the various types of joints used in robotics
4 comprehension c
with sketches.
Distinguish between servo and non – servo grippers.
5 comprehension a
What are the actuators used for such Grippers.
Explain A vacuum gripper is to be designed to handle
flat plate glass in an automobile wind shields Plant.
Each plate weighs 28lb. A single section cup will be
6 used and the diameter of the suction Cup is 60in. Knowledge a
Determine the negative pressure required(compared
to atmospheric pressure of 14.7lb/sq.in) to lift each
plate. Use a safety factor of 1.5 in your computation.
7 Explain the Eagleburger’s factor in gripper selection Knowledge a
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 214
Dept. of MECH
and design
Design magnetic grippers? Evaluate a gripper design
8 Analysis a
process
Sketch any Four of the following robots indicating
the joints and degrees of freedom:
(a) Polar robot
(b) Cylindrical robot
9 Analysis a
(c) Cartesian robot
(d) SCARA robot
(e) Gantry robot
(f) Jointed arm robot.
10 Explain General considerations in gripper design. Knowledge b
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-II
Short Answer Questions
Tutorials Questions
Explain the different types of system for
1 Knowledge a
manipulator kinematics
2 Explain the basic rotation matrix about x axis Knowledge a
3 Explain the basic rotation matrix about Y axis Analysis a
4 Explain the basic rotation matrix about x axis comprehension b
5 Explain the composite rotation matrix about axis comprehension a
6 Explain the composite rotation matrix about Y axis Knowledge b
7 Explain Euler angle Knowledge e
8 Explain Homogeneous transformation matrix Analysis c
Evaluate a 2r manipulator by homogeneous
9 Analysis a
transformaation matrix
10 Explain 2r manipulator by composite rotation matrix Knowledge a
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-II
Long Answer Questions
Tutorials Questions
1 Explain the Eulerian angle system I? Knowledge a
Explain Homogeneous co ordinate system? For the
2 point 2i-3j+7k perform the Knowledge a
Following operations
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 215
Dept. of MECH
i)Rotation 60º about the OY axis
ii) Then translate 10 units along OZ axis .
3 Explain composite rotation matrices. Analysis a
4 Explain the inverse link coordinate transformation comprehension b
Draw and explain with an example the composite
5 comprehension a
rotation algorithm
Determine the Homogeneous transformation matrix
to represent the following sequence of
6 Operations. Knowledge b
(i) Rotation 60º about the OX axis
ii) Then translate 4 units along X- axis
Consider a jointed-arm robot manipulator with its x,
y, and x axes aligned with a reference cartesian
coordinate frame but located at (x, y) = (10 ft, -5 ft).
The end-of-arm of the robot is currently at (x, y, x) =
(12 ft, 2 ft, 2.5 ft) relative to the reference coordinate
frame. An end effector of 10 in. in length is attached
to the end-of-arm and is pointing vertically down.
Relative to the tip of the end effector is a cube, with 6
in. on a side, and with its nearest corner positioned +
7 Knowledge e
1 ft in the x direction, + 2 ft in the y direction, and 0
ft in the x direction from the tip of the end effector.
(a) Make a sketch of the workcell.
(b) Identify all transforms numerically.
(c) Show by means of the transform graph how you
would solve for the transform for the cube relative to
the end effector. That is, determine all transforms
needed to and the transform of the cube relative to
the end effector.
A frame UB was moved along its own n-axis a
distance of 5 units and then rotated about its o-axis an
angle of 600, followed by a rotation of about the z-
axis; it was then translated about it's a-axis 3 units
8 and finally rotated about x-axis 450. Analysis c
(a) Calculate the total transformation performed
(b) What angles and movements would we have to
make if we were to create the same location and
orientation using Cartesian configurations
9 Evaluate a process for basic rotation matrices. Analysis a
10 Explain composite rotation matrices. Knowledge a
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 216
Dept. of MECH
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-III
Short Answer Questions
Tutorials Questions
Explain the geometric interpretation for homogeneous
1 Comprehension b
transformation
Draw any two Euler angle systems and show rotation
2 comprehension a
and angles?
Evaluate the rotation matrices if the end effector is
3 Analysis b
rotated about (i) x-axis by 60°
Evaluate the rotation matrices if the end effector is
4 Analysis e
rotated about (i) Y-axis by 60°
Evaluate the rotation matrices if the end effector is
5 Analysis b
rotated about (i) Z-axis by 60°
Evaluate the kinematic equations for the SCARA
6 robot giving co-ordinate frame diagram and The comprehension a
kinematic parameters?
Derive the kinematic equation for the elbow
7 manipulator with co-ordinate frame Diagram and Analysis b
kinematic parameters?
Explain geometric solution of inverse kinematic with
8 Knowledge e
an example of two-degree system Manipulator?
9 Explain numerical solutions for a 3-DOF manipulator? Knowledge a
Explain Homogeneous transformation for a 3 DOF
10 Knowledge a
manipulator
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-III
Long Answer Questions
Tutorials Questions
Evaluate the geometric interpretation of homogeneous
1 transformations. Analysis b
The coordinates of point Q w.r.to base reference frame
is given by [4, 2√3,5].Determine the Co- ordinates of
2 Q w.r.to mobile rotated frame of the robot. If the angle comprehension a
of rotation with the OX is 60°.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 217
Dept. of MECH
Draw any two Euler angle systems and show rotation
3 comprehension b
and angles?
Evaluate the rotation matrices if the end effector is
rotated about (i) x-axis by 60° (ii) y-axis by 30°
4 Analysis e
(iii) z-axis by 60°
Discuss the DH symbolic notation and explain the DH
5 Knowledge b
method of assignment of co-ordinate Frames.
Assign coordinate frames for an articulated robot arm
6 comprehension a
(3-axis) using D-H convention.
Evaluate the kinematic equations for the SCARA robot
7 giving co-ordinate frame diagram and The kinematic Analysis b
parameters?
Derive the kinematic equation for the elbow
8 manipulator with co-ordinate frame Diagram and Knowledge e
kinematic parameters?
Explain geometric solution of inverse kinematic with
9 Knowledge a
an example of two-degree system Manipulator?
10 Explain numerical solutions for a 3-DOF manipulator? Knowledge a
Blooms
Questions Taxonomy Course
l.No. Level Outcome
UNIT-IV
Short Answer Questions
Tutorials Questions
1 Evaluate a Geometric jacobian Analysis b
Explain the jacobian matrix of a planar two link
2 comprehension a
revolute jointedmanipulator
Explain the Jacobian, Singularities in the revolute
3 comprehension b
joints.
Evaluate how you solve simple inverse kinematic
4 Analysis e
algorithm.
Define the manipulator jacobian matrix J(q) of the
5 Knowledge b
five axis Spherical coordinate robot.
6 Definethe Lagrangian – Euler formulation. comprehension b
Evaluate the expression for joint toques for a planar
7 R-P robotic manipulator using Analysis a
Lagrangian – Euler Formulation.
8 Determine the Jacobian of the 3 DOF Euler wrists? Knowledge b
Define the singularities of a manipulator? How are
9 Knowledge e
they classified and determined? Explain briefly?
10 Explain the Prismatic Joint Jacobian. Knowledge b
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 218
Dept. of MECH
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-IV
Long Answer Questions
Tutorials Questions
Evaluate a Geometric jacobian? Explain.
1 Analysis b
Find the jacobian matrix of a planar two link revolute
2 jointed comprehension a
manipulator
Determine Jacobian, Singularities and Joint velocities
3 for a 3 DOF planar area with comprehension b
the revolute joints.
Evaluate how you solve simple inverse kinematic
4 Analysis e
algorithm.
Find the manipulator jacobian matrix J(q) of the five
5 Knowledge b
axis Spherical coordinate robot.
Establish the dynamic model of a one axis robot
6 (Inverted Pendulum) with comprehension b
Lagrangian – Euler formulation.
Evaluate the expression for joint toques for a planar
7 R-P robotic manipulator using Analysis a
Lagrangian – Euler Formulation.
8 Determine the Jacobian of the 3 DOF Euler wrists? Knowledge b
What are the singularities of a manipulator? How are
9 Knowledge e
they classified and determined? Explain briefly?
Explain (1) Prismatic Joint Jacobian. 2) Rotary Joint
10 Knowledge b
Jacobian.
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-V
Short Answer Questions
Tutorials Questions
1 Define robot dynamics Knowledge b
Explain the expressions for joint torques of a planar R-
2 Knowledge e
R manipulator
Evaluate Using Newton – Euler forward recursive
3 Analysis b
equations.
4 Explain the REACT statement of Robot languages, comprehension a
5 Explain the Newton Euler Formulations. comprehension b
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 219
Dept. of MECH
6 Explain Euler Lagrange manipulator Knowledge e
7 Explain Robot dynamics for a 2r manipulator Knowledge b
8 Evaluate 2r manipulator by using robot dynamics Analysis e
Evaluate a 2 DOF manipulator using Lagrange
9 Analysis b
equations
Explain Newton euler formulations with suitable
10 Knowledge a
example
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-V
Long Answer Questions
Tutorials Questions
Derive the expressions for joint torques of a planar R-R
1 Knowledge b
manipulator by using Lagrange –Euler formulations.
Using Norton Euler forward recursive equations,
determine the motion parameters of the joints
2 Knowledge e
And the centre of mass of links of a planar PR robotics
Manipulator.
Evaluate Using Newton – Euler forward recursive
equations, determine the angular velocities, angular
3 Accelerations, linear accelerations of the joint and the Analysis b
linear acceleration at the center of mass
Of links of a planar RR manipulator.
Explain the REACT statement of Robot languages,
4 which is used to monitor an incoming comprehension a
signal and to respond to a change in the signal.
Discuss the important characteristics of robot –
5 comprehension b
oriented language – motion specification.
Discuss the monitor mode commands of Robot
6 Knowledge e
languages
Derive the dynamic model for the 3-DOF cylinder arm
7 Knowledge b
using Lagrange –Euler formulation
Evaluate a robot dynamics of a manipulator using
8 Analysis e
Newton formulations.
Evaluate a robot dynamics of a manipulator using Euler
9 Analysis b
formulations
10 Explain the Newton Euler Formulations. Knowledge a
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 220
Dept. of MECH
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VI
Short Answer Questions
Tutorials Questions
1 Explain trajectory planing Knowledge b
2 Explain path trajectory Knowledge e
3 Evaluate a 2r manipulator using path trajectory Analysis b
4 Explain continuous path trajectory comprehension a
Differentiate between path trajectory-and continuous
5 comprehension b
path planning
6 Explain the other planning methods for trajectory Knowledge b
Explain Different methods of splitting a joint
7 Knowledge b
trajectory?
8 Evaluate a joint space trajectory planning Analysis e
9 Evaluate Cartesian space trajectory planning Analysis b
10 Knowledge a
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VI
Long Answer Questions
Tutorials Questions
Find expressions for the joint motion parameters by
using cubic polynomial fit in joint space
1 Knowledge b
Scheme.
Use the following data:θ0 = 20, θf = 70, t= 3sec
Determine the time required for each joint of a planar
2 R-R manipulator by using Lagrange-Euler Knowledge e
formulations.
What are the features of joint space trajectory –
3 Analysis b
planning algorithm? Explain
A one – degree of freedom manipulator with rotary
joint is to move from 113º to 210º in 7 sec Find the
4 comprehension a
coefficients of the cubic polynomial to interpolate a
smooth trajectory.
What are the features of joint space trajectory –
5 comprehension b
planning algorithm? Explain.
Explain Different methods of splitting a joint
6 Knowledge b
trajectory?
7 List the types of manipulators employed for travelling Knowledge b
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 221
Dept. of MECH
from point to point motion types?
Define Robot program. What is the purpose of it and
8 what are the various methods used for programming Analysis e
robots?
Explain Joint-Space versus Cartesian space trajectory
9 Analysis b
planning?
Explain the following terms in trajectory planning?
10 1. path 2. Trajectory 3.joint space trajectory planning Knowledge a
4.cartesion space trajectory planning
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VII
Short Answer Questions
TutorialsQuestions
1 Evaluate the working dc electric motors Analysis b
2 Explain the working mechanism of pneumatic actuator comprehension e
3 Explain the working mechanism of hydraulic actuator comprehension b
Evaluate the working mechanism of resolver and
4 Analysis a
encoder
5 Explain the different types of sensors Knowledge b
6 Differentiate the hydraulic and pneumatic actuator comprehension b
7 Evaluate the working of D.C servo motors Analysis e
8 Explain the working of a potentiometer Knowledge b
9 Explain the working of a analog sensors Knowledge a
10 Explain the working of a binary sensors Knowledge b
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VII
Long Answer Questions
TutorialsQuestions
1 Explain the working of DC Servo Motor. Analysis b
2 Discuss the principle of a Resolver. comprehension e
3 Compare the pneumatic and electrical drives. comprehension b
A Hydraulic rotary vane actuator is to be used for a
twist joint. The power source can generate Upto 8Mpa
of pressure for delivery to the cylinder at a rate of 25
4 cm³/sec The outer and inner radii of vane are 62 mm Analysis a
and 19 mm respectively. The thickness of each vane is
5mm. Determine the angular velocity and the torque
that can be generated by the actuator.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 222
Dept. of MECH
5 Discuss about the sensors used in Robotic Arc welding. Knowledge b
Distinguish between servo and non-servo grippers.
6 What are the actuators used of such grippers comprehension b
What is the resolution of an absolute optical encoder
7 Analysis e
that has twelve tracks?
Define Actuators? Classify the actuators briefly?
8 Knowledge b
9 Write the applications of Hydraulic actuators? Knowledge a
Explain 1.binary sensors 2.Analog sensors 3.tactile
10 Knowledge b
sensors 4.Force and torque sensors
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VIII
Short Answer Questions
Tutorials Questions
1 Evaluate the arc welding process in manufacturing Analysis b
Explain the working mechanism of a assembly in
2 comprehension e
manufactring
Explain the application of forging in manufacturing
3 comprehension b
using robots
4 Evaluate continous arc welding with the help of robots Analysis a
Explain the application of industrial Robots in die
5 Knowledge b
casting operation.
Explain the robotic inspection in loading and
6 unloading. comprehension e
Evaluate the robotic inspection in loading and
7 unloading. Analysis b
8 Explain the features of Robots in Arc welding? Knowledge a
9 Explain the benefits of Robot spray painting? Explain. Knowledge b
Explain the considerations of Robots in material
10 handling? Knowledge e
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 223
Dept. of MECH
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VIII
Long Answer Questions
Tutorials Questions
What are the considerations of Robots in material
1 Analysis b
handling?
What are the features of robot in machine loading and
2 comprehension e
unloading Applications?
Explain the application of industrial Robots in Forging
3 comprehension b
operation?
What will artificial skin allow the next generation of
4 Analysis a
robots to do?
Explain the application of industrial Robots in die
5 Knowledge b
casting operation.
What characteristics an arc - welding robotic system
6 comprehension e
must have? Explain.
Discuss the robotic inspection in loading and
7 Analysis b
unloading.
What are the features of Robots in Arc welding?
8 Knowledge a
Explain.
9 What are the benefits of Robot spray painting? Explain. Knowledge b
Explain the application of Industrial robots in die-
10 casting operation. Knowledge e
13. 13 ASSIGNMENT QUESTIONS:
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-I
Short Answer Questions
Assignments Questions
1 Explain automation Knowledge a
2 Explain robotics Knowledge b
3 Evaluate different types of robot configurations Analysis e
4 Expalin different types of robot drive systems comprehension c
5 Explain different types of robot applications comprehension a
6 Explain different types of robot control system Knowledge a
7 Explain open loop control system Knowledge a
8 Explain closed loop control system Analysis a
9 Design a 2r manipulator Analysis a
10 Explain different types of sensors Knowledge b
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 224
Dept. of MECH
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-I
Long Answer Questions
Assignments Questions
1 Explain Automation in Robotics? Understand u
2 Describe Robot architecture? Remember a
3 Write classification of robots by control system? Understand a
Explain degrees of freedom of a robot with different
4 Evaluate e
sketches?
5 Describe different types of Robot configuration? Evaluate e
6 Define end effectors? And classify the end effectors? Remember a
7 Derive the formula for Gripper force analysis? Understand a
Evaluate the four types of actuation mechanisms?
8 Analysis b
Explain with sketches?
9 Explain the co ordinate system of a robot. Understand b
10 Evaluate design process for selecting gripper. Analysis b
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-II
Short Answer Questions
Assignments Questions
Explain the different types of system for
1 Knowledge a
manipulator kinematics
2 Explain the basic rotation matrix about x axis Knowledge a
3 Explain the basic rotation matrix about Y axis Analysis a
4 Explain the basic rotation matrix about x axis comprehension b
5 Explain the composite rotation matrix about axis comprehension a
6 Explain the composite rotation matrix about Y axis Knowledge b
7 Explain Euler angle Knowledge e
8 Explain Homogeneous transformation matrix Analysis c
Evaluate a 2r manipulator by homogeneous
9 Analysis a
transformaation matrix
10 Explain 2r manipulator by composite rotation matrix Knowledge a
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 225
Dept. of MECH
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-II
Long Answer Questions
Assignments Questions
Discuss the operation of rotation about an arbitrary
1 axis represented by a vector and derive. The rotation Evaluate e
matrix and give geometric interpretation?
The co-ordinates of a point qabc is given by (753)T
which is rotated about the OX-axis of the Reference
2 Remember a
frame OXYZ, by angle of 60° .Determine the
coordinates of the point qxyz?
Derive the composite rotation matrix for the
3 rotations about the Cartesian axes. Write the rules Understand a
applied in arriving at composite rotation matrix.
A point pabc = (2, 3, 4)T has to be translated through
distance of +4 units along OX-axis and -2 units along
4 Evaluate e
OZ-axis. Determine the co-ordinates of the new point
pxyz by homogeneous transformation?
Explain the geometric interpretation of homogeneous
5 Analysis b
transformations.
The coordinates of point Q w.r.to base reference
frame is given by [4, 2√3,5].Determine the Co-
6 Understand b
ordinates of Q w.r.to mobile rotated frame of the
robot. If the angle of rotation with the OX is 60°.
Draw any two Euler angle systems and show rotation
7 Evaluate e
and angles?
Find the rotation matrices if the end effector is rotated
about
8 Remember a
(i) x-axis by 60° (ii) y-axis by 30° (iii) z-axis by
60°
9 Expalin the basic rotation matrices on x axis Understand a
Evaluate a design procedure for basic rotation
10 Evaluate e
matrices about y axis.
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-III
Short Answer Questions
AssignmentsQuestions
1 Draw any two Euler angle systems and show rotation Comprehension b
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 226
Dept. of MECH
and angles?
Explain the geometric interpretation for homogeneous
2 comprehension a
transformation
Evaluate the rotation matrices if the end effector is
3 Analysis b
rotated about (i) Y-axis by 60°
Evaluate the rotation matrices if the end effector is
4 Analysis e
rotated about (i) x-axis by 60°
Evaluate the rotation matrices if the end effector is
5 Analysis b
rotated about (i) Z-axis by 60°
Evaluate the kinematic equations for the SCARA
6 robot giving co-ordinate frame diagram and The comprehension a
kinematic parameters?
Derive the kinematic equation for the elbow
7 manipulator with co-ordinate frame Diagram and Analysis b
kinematic parameters?
Explain geometric solution of inverse kinematic with
8 Knowledge e
an example of two-degree system Manipulator?
9 Explain numerical solutions for a 3-DOF manipulator? Knowledge a
Explain Homogeneous transformation for a 3 DOF
10 Knowledge a
manipulator
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-III
Assignments Questions
Derive the kinematic equations for the SCARA robot
1 giving co-ordinate frame diagram and The kinematic Understand a
parameters?
Derive the kinematic equation for the elbow
2 manipulator with co-ordinate frame Analysis b
Diagram and kinematic parameters?
Explain geometric solution of inverse kinematic with
3 an example of two-degree system Understand b
Manipulator?
4 Explain numerical solutions for a 3-DOF manipulator? Evaluate e
5 Discuss about direct and inverse kinematics? Remember a
6 Explain DH convention briefly? Understand a
Define and Illustrate the link and joint parameters
7 Understand a
Explain their uses?
Derive the arm matrices for a cylindrical robot. Hence
8 Analysis b
obtain the kinematic equations for The same?
Explain the numerical solutions for a 3 DOF
9 Understand b
manipulator
10 Evaluate a manipulator using DH conventions Evaluate e
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 227
Dept. of MECH
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-IV
Short Answer Questions
AssignmentsQuestions
1 Evaluate a Geometric jacobian Analysis b
Explain the jacobian matrix of a planar two link
2 comprehension a
revolute jointedmanipulator
Explain the Jacobian, Singularities in the revolute
3 comprehension b
joints.
Evaluate how you solve simple inverse kinematic
4 Analysis e
algorithm.
Define the manipulator jacobian matrix J(q) of the
5 Knowledge b
five axis Spherical coordinate robot.
6 Definethe Lagrangian – Euler formulation. comprehension b
Evaluate the expression for joint toques for a planar
7 R-P robotic manipulator using Analysis a
Lagrangian – Euler Formulation.
8 Determine the Jacobian of the 3 DOF Euler wrists? Knowledge b
Define the singularities of a manipulator? How are
9 Knowledge e
they classified and determined? Explain briefly?
Explain the Prismatic Joint Jacobian.
10 Knowledge b
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-IV
Long Answer Questions
Assignments Questions
1 Explain Jacobian of articulated arm. Remember a
Singularities and Joint velocities of a 2DOF arm.
2 Understand a
Determine
3 Evaluate a Jacobian matrices for a 2 DOF manipulator. Analysis b
Explain Singularities and jacobian matrices for a joint
4 Understand b
manipulator
Evaluate Joint velocities for a 3-DOF planar arm with
5 Evaluate e
the revolute joints.
6 Explain about Prismatic Joint Jacobian. Remember a
7 Explain about Rotary Joint Jacobian. Understand a
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 228
Dept. of MECH
What are the singularities of a manipulator? How are
8 Analysis b
they classified and determined? Explain briefly?
9 Determine the Jacobian of the 3 DOF Euler wrists? Understand b
10 Design a manipulator using jacobian matrices. Analysis b
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-V
Short Answer Questions
AssignmentsQuestions
1 Define robot dynamics Knowledge b
Explain the expressions for joint torques of a planar R-
2 Knowledge e
R manipulator
Evaluate Using Newton – Euler forward recursive
3 Analysis b
equations.
4 Explain the REACT statement of Robot languages, comprehension a
5 Explain the Newton Euler Formulations. comprehension b
6 Explain Euler Lagrange manipulator Knowledge e
7 Explain Robot dynamics for a 2r manipulaotor Knowledge b
8 Evaluate 2r manipulator by using robot dyamics Analysis e
Evaluate a 2 DOF manipulator using Lagrange
9 Analysis b
equations
Explain Newton euler formulations with suitable
10 Knowledge a
example
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-V
Long Answer Questions
Assignments Questions
Describe the advantages and disadvantages of Newton-
1 Analysis b
Euler formulation?
Determine the variation of joint torques from the
dynamic model of 2-DOF manipulator. Take the
following data for the manipulator.
m1 = m2 = 6kg and L1 = L2 = 1m
2 Understand b
The specified motion cycle is:Both joints move from
rest with equal velocity, attain max.Velocity then
decelerate and come to rest, Traversing π/2 radians in 1
sec.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 229
Dept. of MECH
Describe the advantages and disadvantages of
3 Evaluate e
lagrange-Euler formulation?
Explain Recursive Newton-Euler
4 formulation?andWrite the forward Iteration for Newton- Remember a
Euler formulation?
Derive the dynamic model for the 2-DOF RR
5 Understand a
manipulator using Lagrange-Euler formulation?
Write the application of dynamic model to study the
6 Analysis b
torque variations?
Make a comparison of NE and LE formulations and
state the situation(s) when you will prefer NE
7 Understand b
formulation and when you will prefer LE formulation.
Derive the dynamic model for the 2-DOF Planar
8 Analysis b
manipulator using Newton – Euler formulation?
Explain Newton Euler transformations for a 2 DOF
9 Understand b
manipulator.
10 Evaluate a dynamic model for a 2 DOF manipulator. Evaluate e
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VI
Short Answer Questions
Assignments Questions
1 Explain traejectory plannning Knowledge b
2 Explain path trajectory Knowledge e
3 Evaluate a 2r manipulator using path trajectory Analysis b
4 Explain continous path trajectory comprehension a
Differentiate between path trajectoryand continous path
5 comprehension b
planning
6 Explain the other planning methods for trajectory Knowledge b
Explain Defferent methods of splitting a joint
7 Knowledge b
trajectory?
8 Evaluate a joint space trajectory planning Analysis e
9 Evaluate cartesian space trajectory planning Analysis b
10 Explain the cartesian space trajectory planning Knowledge a
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 230
Dept. of MECH
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VI
Long Answer Questions
Assignments Questions
The second joint of a SCARA manipulator is required
to move from =30° to 150° in 5 seconds. Find the cubic
1 polynomial to generate the smooth trajectory for the Evaluate e
joint. What is the max velocity and acceleration for this
trajectory?
Explain Joint-Space versus Cartesian space trajectory
2 Remember a
planning?
Explain the following terms in trajectory planning?
3 1. path 2. Trajectory 3.joint space trajectory planning Understand a
4.cartesion space trajectory planning
4 write the steps in trajectory planning? Understand b
5 What are the joint space techniques? Explain? Evaluate e
Explain the use of a P-Degree polynomial as
6 interpolation function. Understand b
7 Explain Cubic polynomial Trajectories? Evaluate e
What are the Cartesian space techniques, Explain
8 Remember a
Briefly?
Explain the procedure for drawing a trajectory in point
9 Understand a
to point
Explain the trajectory planning for continous co
10 Understand b
ordinate system.
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VII
Short Answer Questions
AssignmentsQuestions
1 Evaluate the working dc electric motors Analysis b
2 Explain the working mechnaism of pneumatic actuator comprehension e
3 Explain the working mechanism of hydraulic actuator comprehension b
Evaluate the working mechanism of resolver and
4 Analysis a
encoder
5 Explain the different types of sensors Knowledge b
6 Differentiate the hydraulic and pneumatic actuator comprehension b
7 Evaluate the working of D.C servo motors Analysis e
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 231
Dept. of MECH
8 Explain the working of a potentiometer Knowledge b
9 Explain the working of a analog sensors Knowledge a
10 Explain the working of a binary sensors Knowledge b
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VII
Long Answer Questions
Assignments Questions
1 Define Actuators? Classify the actuators briefly? Remember a
2 Write the applications of Hydraulic actuators? Understand a
3 Describe electric Actuators briefly? Analysis b
Explain 1.binary sensors 2.Analog sensors 3.tactile
4 Understand b
sensors 4.Force and torque sensors.
5 Write the classification of robotic sensors? Evaluate e
Discuss the industrial and non-industrial applications of
6 Evaluate e
vision –controlled robots?
Explain :Incremental Encoders and Optical Encoders
7 Remember a
Absolute Encoders
8 Explain the pneumatic actuators Understand a
9 Explain the electric motors and their types Understand b
10 Evaluate a motor for precision work Analysis b
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VIII
Short Answer Questions
Tutorials Questions
1 Evaluate the arc welding process in manufacturing Analysis b
Explain the application of forging in manufacturing
2 comprehension e
using robots
Explain the working mechanism of a assembly in
3 comprehension b
manufacturing
4 Evaluate continous arc welding with the help of robots Analysis a
Explain the application of industrial Robots in die
5 Knowledge b
casting operation.
6 Explain the robotic inspection in loading and comprehension e
Evaluate the robotic inspection in loading and
7 Analysis b
unloading.
8 Explain the features of Robots in Arc welding? Knowledge a
9 Explain the benefits of Robot spray painting? Explain. Knowledge b
Explain the considerations of Robots in material
10 Knowledge e
handling?
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 232
Dept. of MECH
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VIII
Long Answer Questions
Assignments Questions
Explain the application of Industrial robots in die-
1 Understand a
casting operation.
Evaluate the use of industrial robots in forging and
2 Analysis b
related operations?
What type of manipulator is generally used in welding
3 Understand b
applications?
4 Why a robot is considered as a 24/7 worker? Understand a
As technology advances the human worker lose jobs to
5 Analysis b
robotic workers? Comment?
6 Why robots are useful in industries? Understand b
7 What do you think of future of robots? Remember a
Write a short note describing the factory of future.
8 Understand a
What will be the role of humans in this factory?
9 Design a manipulator for arc welding application Evaluate e
10 Design a manipulator using Spray painting application Evaluate e
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 233
Dept. of MECH
14.0 UNCONVENTIONAL MACHINING PROCESS (A70359)
14.1 COURSE DESCRIPTION:
Course Title UNCONVENTIONAL MACHINING PROCESS
Course Code A70359
Regulation R13 – JNTUH
Course Structure Lectures Tutorials Practicals Credits
4 1 - 4
J.Ashok , K.Shravan Kumar
Course Coordinator
Team of Instructors
COURSE OVERVIEW:
The objective of this course is to introduce the student to mole advanced topics in
the machining processes. The concept of material removal by an edged tool, involving
plastic deformation and formation of chips, has been known to man for several hundred
years.
In recent years on increasing demand for the machining of components of
complex shape made hard, difficult - to - machine materials with exacting tolerances ad
surface finish has resulted in the development of a number of new machining processes.
The subject includes, the study of modern machining processes like ultrasonic
machining, electro chemical machining, electric discharge machining, electron beam
machining, laser beam machining & plasma for machining. All there machining
processes are used for the machining of complex shapes made hard difficult to machine
materials.
14.2 PREREQUISITES:
Level Credits Periods/Weeks Prerequisites
Engineering Workshop, Production
UG 4 4 Technology, Metallurgy & Materials
Science
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 234
Dept. of MECH
14.3 MARKS DISTRIBUTIONS:
University End Total
Session Marks (25M)
Exam Marks Marks
Continuous Assessment Tests (Midterm tests):
There shall be 2 midterm examinations. Each midterm
examination consists of one objective paper, one
subjective paper and four assignments. The objective
paper is for 10 marks and subjective paper is for 10
marks, with duration of 1 hour 20 minutes (20 minutes for
objective and 60 minutes for subjective paper).
Objective paper is set for 20 bits of – multiple choice
questions, fill-in the blanks, 10 marks. Subjective paper
contains of 4 full questions (one from each unit) of
which, the student has to answer 2 questions, each
75 100
question carrying 5 marks. First midterm examination
shall be conducted for 2.5 units of syllabus and second
midterm examination shall be conducted for another 2.5
units. 5 marks are allocated for Assignments. First two
assignments should be submitted before the
conduct of the first mid, and the second two assignments
should be submitted before the conduct of the second mid.
The total marks secured by the student in each midterm
examination are evaluated for 25 marks, and the average
of the two midterm examinations shall be taken as the
final marks secured by each candidate.
14.4 EVALUATION SCHEME:
S. No Component Duration Marks
1 I Mid Examination 1 hour and 20 min 20
2 I Assignment 5
3 II Mid Examination 1 hour and 20 min 20
4 II Assignment 5
MID Examination marks to be considered as average of above 2 MID’s
5 External Examination 3 hours 75
Total 75
COURSE OBJECTIVES:
1. To teach the modeling technique for machining processes
2. To teach interpretation of data for process selection
3. To teach the mechanics and thermal issues associated with chip formation
4. To teach the effects of tool geometry on machining force components and surface
5. finish
6. To teach the machining surface finish and material removal rate.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 235
Dept. of MECH
14.5 COURSE OUTCOMES:
1. Understand the basic techniques of machining processes modeling
2. Understand the mechanical aspects of orthogonal cutting mechanics
3. Understand the thermal aspects of orthogonal cutting mechanics
4. Ability to extend, through modeling techniques, the single point, multiple point
and abrasive machining processes
5. Estimate the material removal rate and cutting force, in an industrially useful
manner, for practical machining processes
14.6 HOW PROGRAM OUTCOMES ARE ASSESSED:
Program Outcomes Level Proficiency
assessed by
A Graduates will demonstrate the ability to use basic Assignments,
knowledge in mathematics, science and engineering and H Tutorials,
apply them to solve problems specific to mechanical Exams
engineering (Fundamental engineering analysis skills).
B Graduates will demonstrate the ability to design and
conduct experiments, interpret and analyze data, and report S Project work
results (Information retrieval skills).
C Graduates will demonstrate the ability to design any Assignments,
mathematical system or thermal that meets desired S Tutorials,
specifications and requirements (Creative skills). Exams
D Graduates will demonstrate the ability to function as a Project
coherent unit in multidisciplinary design teams, and deliver S work
results through collaborative research (Teamwork).
E Graduates will demonstrate the ability to identify, formulate Assignments,
and solve mechanical engineering problems of a complex H Exams
kind (Engineering problem solving skills).
F Graduates will demonstrate an understanding of their Assignments,
professional and ethical responsibilities, and use technology H Tutorials,
for the benefit of mankind(Professional integrity).
G Graduates will be able to communicate effectively in both S --
verbal and written forms (Speaking / writing skills).
H Graduates will have the confidence to apply engineering Assignments,
solutions in global and national contexts (Engineering H Tutorials,
impact assessment skills).
I Graduates should be capable of self-education and clearly Assignments,
understand the value of life-long learning (Continuing H Tutorials,
education awareness).
J Graduates will develop an open mind and have an
understanding of the impact of engineering on society and S --
demonstrate awareness of contemporary issues (Social
awareness).
K Graduates will be familiar with applying software methods
and modern computer tools to analyze mechanical H --
engineering problems (Software hardware interface).
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 236
Dept. of MECH
L Graduates will have the ability to recognize the importance
of professional development by pursing post graduate Gate exam,
studies or face competitive examinations that offer S Job
challenging and rewarding careers in Mechanical interviews
Engineering (Successful career andimmediate
employment).
M Graduate will be able to design a system to meet desired
needs within environmental, economic, political, ethical Assignments,
health and safety, manufacturability and management H Tutorials,
knowledge and techniques to estimate time, resources to Exams
complete project (Practical engineering analysis skills).
N = N = None S = Supportive H = Highly Related
14.7 JNTUH SYLLABUS:
UNIT – I
INTRODUCTION – Need for non-traditional machining methods-Classification of modern
machining processes – considerations in process selection. Materials. Applications.
UNIT -II
Ultrasonic machining – Elements of the process, mechanics of metal removal process parameters,
economic considerations, applications and limitations, recent development.
UNIT -III
Abrasive jet machining, Water jet machining and abrasive water jet machine : Basic principles,
equipments, process variables, mechanics of metal removal, MRR, application and limitations.
UNIT –IV
ELECTRO – CHEMICAL PROCESSES : Fundamentals of electro chemical machining,
electrochemical grinding, electro chemical honing and deburring process, metal removal rate in
ECM, Tool design, Surface finish and accuracy economic aspects of ECM – Simple problems for
estimation of metal removal rate. Fundamentals of chemical, machining, advantages and
applications.
UNIT -V
THERMAL METAL REMOVAL PROCESSES : General Principle and applications of Electric
Discharge Machining, Electric Discharge Grinding and electric discharge wire cutting processes –
Power circuits for EDM, Mechanics of metal removal in EDM, Process parameters, selection of
tool electrode and dielectric fluids, methods surface finish and machining accuracy,
characteristics of spark eroded surface and machine tool selection. Wire EDM, principle,
applications.
UNIT – VI
Generation and control of electron beam for machining, theory of electron beam machining,
comparison of thermal and non-thermal processes –General Principle and application of laser
beam machining – thermal features, cutting speed and accuracy of cut.
UNIT-VII
Application of plasma for machining, metal removing mechanism, process parameters, accuracy
and surface finish and other applications of plasma in manufacturing industries. Chemical
machining - principle-maskants-applications.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 237
Dept. of MECH
UNIT-VIII
Magnetic abrasive finishing, Abrasive flow finishing, Electro stream drilling, shaped tube
electrolyte machining.
TEXT BOOKS:
T1: Advanced Machining Processes / VK Jain / Allied publishers
T2: Modern MacHining Processes - P. C. Pandey, H. S. Shan
REFERENCE BOOKS:
R1: Manufacturing Engineering And Technology By Serope Kalpakjain,Pearson Publications.2001
14.8 COURSE PLAN:
At the end of the course, the students are able to achieve the following Course Learning
Outcomes.
Lecture
Course Learning Outcomes Topics to be covered Reference
No.
Define non-traditional Introduction non-traditional machining T1
1
machining methods methods
Use of Non Traditional Need for non-traditional machining T1
2
machining methods methods
Classification of modern Classification of modern machining T1
3
machining processes processes
List out the Considerations in T1
4 Considerations in process selection.
process selection.
List out the Considerations in T1
5 Considerations in Materials.
Materials.
Discuss the Applications of non- T1
6 Applications of non-traditional machining
traditional machining
Describe Ultrasonic machining Ultrasonic machining Elements of the T1
7
Elements of the process process
Evaluate Mechanics of metal Mechanics of metal removal process T1
8
removal process parameters parameters
T1
9 Define grain hammering Method 2 (Grain Hammering)
Discuss the Economic T1
10 Economic considerations
considerations in USM
Identify Recent development in T1
11 Recent development.
USM
Discuss the Limitations of USM T1
12 Limitations
Discuss the Applications of T1
13 Applications
USM
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 238
Dept. of MECH
Explain the principle of T1
14 Abrasive jet machining,
Abrasive jet machining,
Explain the principle of Water T1
15 Water jet machining
jet machining
Explain the principle of T1
16 Abrasive water jet machine
Abrasive water jet machine
List out the Basic principles T1
17 Basic principles AWJM,
AWJM,
Describe the Equipment for T1
18 Equipments,
AJM
Discuss the Mechanics of metal T2
19 Mechanics of metal removal,
removal,
Define Metal Removal Rate T2
20 Metal Removal Rate (MRR),
(MRR),
List Out the Application and T2
21 Application and limitations.
limitations of AJM .
Define the Fundamentals of Fundamentals of electro chemical T2
22
electro chemical machining, machining,
Describe Electrochemical T2
23 Electrochemical grinding,
grinding,
Explain the principle of T2
24 Electro chemical honing Electro chemical honing
process
Explain the principle of T2
25 Deburring process,
Deburring process,
Discuss about the Tool Design T2
26 Tool design,
in ECM
Evaluate Surface finish and T2
27 Surface finish and accuracy
accuracy
What are the Economic aspects T2
28 Economic aspects of ECM
of ECM
Evaluate the MRR in ECM Simple problems for estimation of metal T2
29
removal rate.
Discuss the Fundamentals of T2
30 Fundamentals of chemical Machining,,
chemical Machining,,
List out the Advantages T2
31 Advantages &Applications
&Applications of ECM
Explain the Principle Thermal General Principle Thermal Metal Removal T2
32
Metal Removal Processes Processes
Describe the Electric discharge T2
33 Electric discharge wire cutting processes
wire cutting processes
34 Describe the Electric discharge Electric discharge wire cutting processes T2
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 239
Dept. of MECH
wire cutting processes
Explain the Mechanics of metal T2
35 Mechanics of metal removal in EDM,
removal in EDM,
List out the Process parameters T2
36 Process parameters,
in EDM
37 Identify the Selection of tool Selection of tool electrode and dielectric T2
electrode and dielectric fluids fluids,
Discuss the Methods surface Methods surface finish and machining T2
38
finish and machining accuracy accuracy,
Explain the Characteristics of Characteristics of spark eroded surface and T2
39
spark eroded surface machine tool selection.
Explain the process of Wire T2
40 Wire EDM,
EDM
List out the applications of T2
41 Principle, Applications.
EDM
Describe about Generation and T2
Generation and control of electron beam
42 control of electron beam for
for machining,
machining
Explain the principle of T2
43 Theory of electron beam machining,
electron beam machining
Distinguish between thermal Comparison of thermal and non-thermal T2
44
and non-thermal processes processes
Explain the principle of laser T2
45 General Principle of laser beam machining
beam machining
Evaluate the cutting Speed and T2
46 Cutting speed and accuracy of cut.
accuracy of cut
Write the Thermal features of T2
47 Thermal features,
EBM
List out the applications of T2
48 Application of laser beam machining
EBM and LBM
Define Plasma machining T2
49 Introduction to plasma machining,
process
Explain the process of Metal T2
50 Metal removing mechanism,
removing mechanism
Write the Process parameters T2
51 Process parameters,
for PAM
Define Accuracy and surface T2
52 Accuracy and surface finish
finish
List out the Other applications T2
Other applications of plasma in
53 of plasma in manufacturing
manufacturing industries.
industries.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 240
Dept. of MECH
Define Chemical machining T2
54 Chemical machining
Explain the Principle of T2
55 Principle
chemical machinig
What are Maskants T2
56 Maskants
List out the applications for T2
57 Applications.
Chemical Machining
Describe the process of T2
58 Magnetic abrasive finishing,
Magnetic abrasive finishing,
Explain the principle of T2
59 Abrasive flow finishing,
Abrasive flow finishing,
T2
60 Define Electro stream drilling, Electro stream drilling,
Describe the process of shaped T2
61 shaped tube electrolyte machining.
tube electrolyte machining
List out the applications of Application T2
62
MAF
14.9 MAPPING COURSE OBJECTIVES LEADING TO THE ACHIEVEMENT
OF PROGRAM OUTCOMES:
Course Program Outcomes
Objectives a b c d e f g h i j k l m
1 H S S H H H S H
2 S S S
3 H S S S H S
4 H S H
5 H S H H H H
S = Supportive H = Highly Related
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 241
Dept. of MECH
14.10 MAPPING COURSE OUTCOMES LEADING TO THE ACHIEVEMENT
OF PROGRAM OUTCOMES:
Course Program Outcomes
Outcomes a b c d e f g h i j k l m
1 S H S H H S H H
2 S H H H H S H H
3 S H S H H S H H
4 S S S S S S S S
5 S S S S S S S S
S = Supportive H = Highly Related
14.11 OBJECTIVE QUESTIONS:
UNIT-I
1. Removing metal from work piece is ______ method. [A]
a) Non-conventional b) Conventional c) Modern machining d) ALL
2. Removing metal from work piece by using some advance techniques is called
_______ methods. [ C]
a) Conventional b) Unconventional c) Modern machining d) None
3. Unconventional or Non conventional machining processes are also called
________ machining process. [ B ]
a) Conventional b) Non traditional c) Simple d) None
4. Soft materials are not machined in ________. [B ]
a) AJM b) USM c) WJM d) None
5. In USM, the electrical energy is converted into ________. [B ]
a) Vibrations b) Mechanical vibrations c) Drilling d) None
6. The electrical energy is converted into mechanical vibrations by means of ____
effect.[ B ]
a) Farady’s law b) Magnetostrictive c) Seebeck d) None
7. In USM process ________ are used with water. [B ]
a) Sand b) Abrasive & eroded particles c) Stones d) None
8. For hard & brittle material machining __________ process is used. [B ]
a) AJM b) USM c) WJM d) All
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 242
Dept. of MECH
9. In USM surface finish obtained is ___________. [A ]
a) 0.1μ b) 0.125 μ c) 0.075 μ d) None
10. Soft materials are not machined in ________. [A ]
a) AJM b) USM c) WJM d) None
11. The cutting speed is Maximum while machining -------------with high speed steel tool.
[ D ]
a) Cast Iron
b) Mild steel
c) Brass
d) Aluminium
12. The width of cutting edge of parting tool varies from-------- [ A ]
a) 3 – 12mm
b) 5 – 20mm
c) 8 – 30mm
d) 15 – 40mm
13. Cutting fluids mostly used for machining steel is ----------------- B ]
a) Water
b) Soluble oil
c) Dry
d) Heavy oil
14. When cutting face of tool is 900 to the line of action of tool then it is known as -[ B ]
a) Oblique cutting
b) Orthogonal cutting
c) ASA System
d) ORS System
15. Work done in metal cutting is depends on ---------------------- [ A ]
a) Cutting force & Cutting speed
b) Cutting speed & heat generated
c) Depth of cut & cutting speed
d)Depth of Cut & Cutting Force
16. -------------Gives best finish [ C ]
a) Lower cutting speed & higher feed
b) Higher cutting speed & higher feed
c) Higher cutting speed & fine feed
d) All the above
17. As the cutting speed increases tool cutting forces---------------- [ C ]
a) Remains constant
b) Increases
c) decreases
d)None
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 243
Dept. of MECH
18. Larger end cutting edge angle --------------Tool life [ A ]
a) Increases
b) decreases
c) No effect
d)all the above
19. ------------are most commonly used for measuring force in metal cutting [ A ]
a) Mechanical & Strain gauge dynamometer
b) Calorimeter
c) Wattmeter
d)Ammeter
20. Surface which face the work piece is known as--------------of the tool [ A ]
a) Flank
b) Heel
c) Base
d) Top Angle
UNIT-II
1.The machining rate in ultrasonic machining is high in the case of the following [ B ]
a) Hard b) Brittle c) Ductile d) Malleable
2.In USM, abrasive slurry consists of [ C ]
a) liquid media b) Abrasive particles c) Both a &b d) None
3.The ultrasonic machining uses ___________ for machining [ B ]
a) chemical reactions b) ultrasonic vibrations c) both a & b d) None
4.In ultrasonic machining process, the metal removal will take place during [ C ]
a) Discharging of the capacitor b) Application of high current
c) At the application of abrasive slurry d) All time
5.In USM the metal is removed by [ A ]
a) Using abrasive slurry between the tool and work
b) Direct contact of tool with the work
c) Maintaining an electrolyte between the work and tool in a very small gap between
the two
d) Erosion caused by rapidly recurring spark discharges between the tool and work
6.The abrasive slurryy isused in USM contains fine particles of [ D ]
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 244
Dept. of MECH
a) Aluminium oxide b) Boron Carbide c) Silicon Carbide d) Any one of the Above
7.In USM the frequency of oscillation is [ C ]
a) 10-15 KHz b) Below 10 KHz c) Above 15 KHz d) Above 20 KHz
8.Ultrasonic machining is best suited for [ A ]
a) Tool steels b) Cemented carbides c) Glass-epoxy d) All of the
Above
9.In USM process the surface finish process is also influenced by the parameters
are[D ]
a) Amplitude of Vibration b) Proporties of work material
c) finish of the tool surface d) All of the Above
10.Ultrasonic machining removes material by [ B ]
a)Direct vibration of the tool with work piece b)Using abrasive slurry between tool and work
c)All the above
11. Which of the following material is not generally machined by USM [ A ]
a)Copper b)Glass c)Silicon d)Germanium
12. Tool in USM is generally made of [ D ]
a)Glass b)Ceramic c)Carbides d)Steel
13. Increasing volume concentration of abrasive in slurry would affect MRR in the following
manner
[ A ]
a)increase MRR b)decrease MRR c)would not change MRR
d)initially decrease and then increase MRR
14. USM can be classified as the following type of non-traditional machining process[ C ]
a)electrical b)optical c)mechanical d)chemical
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 245
Dept. of MECH
15. Increasing amplitude, would affect MRR in the following manner
[ A ]
a)increase MRR b)decrease MRR c)would not change MRR
d)initially decrease and then increase MRR
16. Increasing frequency, would affect MRR in the following manner
[ A ]
a)increase MRR b)decrease MRR c)would not change MRR
d)initially decrease and then increase MRR
17. The amplitude of vibration in USM Process is [ B ]
a)7-10 microns a)15-50 microns a)50-70 microns a)70-90 microns
18.The Tool in the USM will depend on the [ D ]
a)Tool material b)Shape c)Frequency of Vibration d)All The above
19. Increasing the concentration of slurry would affect MRR in the following manner
[ D ]
a)increase MRR b)decrease MRR c)would not change MRR
d)initially increase and then decrease MRR
20. The value of MRR depends on [ D ]
a)abrasive b) work material c) tool materials d) all the above
UNIT-III
1. In abrasive machining process the abrasive particles should be[ D ]
a) Perfectly round b) Made of diamond powder c) Around 5mm size d) of irregular
shape
2. Stand off distance of the nozzle in AJM [ A ]
a) Effects accuracy of the component b) Does not effects accuracy of the component
c) Effects density of the component d) partially correct
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 246
Dept. of MECH
3. Water jet machining (WJM) is best suited for the explosive environment[ C ]
a) can not say b) in correct c) correct d) partially correct
4. In AJM abrasive jet consists of [ C ]
a) compressed air b) Abrasive particles c) Both a&b d) None
5. Thin bimetallic materials also can be machined in _________ process.
a) AJM b) USM c) WJM d)
6. Material used for making a nozzle employed in AJM process may by [ B ]
a) Copper b) Tungsten Carbide c) Stainless steel d) Bronze
7. The decrease in abrasive flow velocity causes a ------ in Metal removal rate [ B ]
a) Increases b) Reduction c) Increases and decreses d) Decreses and Increases
8. Air & abrasive mixture is used in _________ process. [ A ]
a) AJM b) WJM c) USM d) None
9. The nozzle is made up of ___________ material. [ B ]
a) Tungsten b) Aluminum c) Iron d) None
10. The gas pressure in AJM is [ C ]
a) 2-8 kg/cm2 b) 1-4 kg/cm2 c) 1-3 kg/cm2 d) None
11. The table in a slotter is a [ B ]
a) Square Table
b) Circular Table
c) Rectangular Table
d) Semi – circular Table
12. Normally shaping machine is used for producing
[ C ]
a) Threads
b) Cylindrical surfaces
c) Surfaces composed of straight line elements
d) Cylindrical holes.
13. In a planer [ D ]
a) The tool is rotated
b) The tool is reciprocated
c) The job is rotated
d) The job is reciprocated
14. Size of a shaper is given by [ A ]
a) stroke length
b) motor power
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 247
Dept. of MECH
c)weight of machine
d)table size
15. In a mechanical shaper the lifting of the tool during idle stroke is ensured by [ D ]
a) tool head
b) ratchet and pow mechanism
c) ram adjustment
d)clamper box mechanism
16. If the speed of Forward Stroke in a shaper is 12 m/min, the speed of Backward Stroke
should be [ C ]
a) 6 or 15 m/min
b) 12 m/min
c) 8 or 18 m/min
d) 6 or 24 m/min
17. Drill bushes are made up of [ D ]
a) High Speed Steel
b) Aluminum
c) Low carbon steels
d) High Carbon Steels, hardened and ground
18. Drill bushes are made up of [ B ]
a) High Speed Steel
b) Aluminum
c) Low carbon steels
d) High Carbon Steels, hardened and ground
19. Drill chucks are used for holding
[ B ]
a) Taper shank drills
b) Straight shank drills
c) Hexagonal shank drills
d) Square shank drills
20. In reaming process [ C ]
a) Metal removal rate is high
b) position of drilled hole is corrected
c) high form accuracy is obtained
d) high dimensional accuracy is obtained
UNIT-IV
1. The metal removal rate is highest in _________ process [ C ]
a) AJM b) WJM c) ECM d) none
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 248
Dept. of MECH
2. Machining in Electro chemical machining process will occur basically due to
_______ reaction [ B ]
a)shearing of metal b) chemical reaction c) ultra sound d) abrasive
3. Desirible properties of electrolytes used in ECM are [A ]
a) High Electrical Conductivity b) High thermal Conductivity
c) Low specific heat d) High specific heat
4. Which of the following work piece properties affect MRR during ECM[ C ]
a) Physical b) Chemical c) Mechanical d) Electrical
5. --------------------- process is a thermo electric machining process [ A ]
a) AJM b) LBM c) CHM d) ECM
6.Following electrolyte is used in electro-Chemical Machining Process [ C ]
a)Brine solution b)Kerosene c)Water d)Transformer oil
7.___________ wire is used as a cutting tool [ B]
a) Brass or molybdenum b) Cu b) Iron d) all
8.The spark occurs in an interval of ___________ sec. in WC EDM.[ A ]
a) 10 – 30 b) 20 – 30 c) 25 – 30 d) all
9.Spark frequency in WC EDM is ____________ KHZ. [ D]
a) 200 – 500 b) 100 – 200 c) 50 – 100 d) none
10.MRR in WC EDM __________ mm3 / sec. [ B]
a) 15 -80 b) 10 – 15 c) 50 – 60 d) all
11. The surface finish obtained in broaching operation is of the order of [ B ]
(a) 8 micron
(b)0.8 micron
(c) 0.08 micron
(d) 0.008 micron
12. The maximum depth of cut which the tooth of a broach cuts is [ B ]
(a) I mm (b) 0.15 nim (c) 0.01 mm
(d) 0.5 mm
13. A broach has
(a) roughing teeth, semifinishing teeth and finishing teeth[ A ]
(b) roughing teeth and finishing teeth
(c) only finishing teeth
(d)Non of above
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 249
Dept. of MECH
14. The pitch for teeth of internal brooches is given by the relation: [ B ]
(a) 0.35 times length of cut in mm.
(b) 1.25 to 1.5 times length of cut in mm
(c) 4 times length of cut in mm
(d) None of the above
15. For proper broaching. at least the following number of teeth should be in the work at a time
[ C ]
(a) 1 (b) 2 (c) 3 (d)0
16. Choose the wrong statement: In broaching [ B ]
(a) the job is completed in one stroke of the machine
(b) the tooling WU is low
(c) the rate of production is high
(d)Non of above
17. The finishing teeth of a broaching tool are provided with [ B ]
(a) large amount of land
(b) smaller amount of land
(c) no land
(d)Non of above
18. The range of hardness of the material which can be broached is [ B ]
(a) 10 to 20 Rockwell C
(b) 25 to 40 Rockwell C
(c) 60 to 80 Rockwell C
(d)Non of above
19. Broaching is primarily done for [ C ]
(a) better finish
(b) cylindrical jobs
(c) mass production
(d) hard materials
20. The broaching operation in which the tool moves past the stationary work is[ D ]
(a) push broaching
(b) pull broaching
(c) continuous broaching
(d) surface broaching I
UNIT-V
1. ________ is/are function/s of dielectric fluid used in EDM [ D ]
(a) It acts as an insulating medium
(b) It cools the spark region and helps in keeping the tool and work piece cool
(c) It maintains a constant resistance across the gap and carries away the eroded metal
particles (d) a, b & c
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 250
Dept. of MECH
2. ________is/are the prime requirement/s of tool material in EDM [ A ]
(a) It should be electrically conductive (b) It should have high erosion
(c) It should have high electrical resistance (d) a, b & c L
3.-----is/are the process parameter/s that affect/s Material removal rate in EDM [ C ]
(a) Energy discharge and Capacitance (b) Size of work piece (c) a & b (d) none
4. In EDM process, cathode electrode is [ B ]
A. Tool B. External Component C. Work piece D. None of the above
5. In wire cut EDM process, the tool is [ B ]
A. Shaped electrode B. Wire C. Shaped wire D. None of the above
6. The following is not the property of dielectric used in EDM process [ C ]
A. Good fluidity B. Good dielectric strength C. Good conductor of current D. None of
the above
7. Which of the following is not a thermoelectric process? [D ]
a) Electric Discharge Machining (EDM) b) Electric Beam Machining (EBM)
c) Plasma Arc Machining (PAM) d) Electrochemical Machining (ECM)
8. The ratio of break down voltage to the supply voltage for maximum power delivery in
EDM is. [ A ]
a) 0.72 b) 1.0 c) 0.75 d) 0.65
9.A good dielectric fluid should posses [D]
a) High dielectric strength b) serve as an effective cooling medium
c) High degree of fluidity d) all of the above
10.Feed to electrode during EDM is given to maintain [B]
a) Constant velocity of dielectric flow b) constant inter electrode gap
c) Constant current density d) none of the above
11. The metal removal rate is highest in _________ process [ C ]
a) AJM b) WJM c) ECM d) none
12. Machining in Electro chemical machining process will occur basically due to
_______ reaction [ B ]
a)shearing of metal b) chemical reaction c) ultra sound d) abrasive
13. Desirible properties of electrolytes used in ECM are [A ]
a) High Electrical Conductivity b) High thermal Conductivity c) Low specific heat
d) High specific heat
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 251
Dept. of MECH
14. Which of the following work piece properties affect MRR during ECM[C]
a) Physical b) Chemical c) Mechanical d) Electrical
15. --------------------- process is a thermo electric machining process [ A]
a) AJM b) LBM c) CHM d) ECM
16.Following electrolyte is used in electro-Chemical Machining Process [C ]
a)Brine solution b)Kerosene c)Water d)Transformer oil
17.___________ wire is used as a cutting tool [ B]
a) Brass or molybdenum b) Cu b) Iron d) all
18.The spark occurs in an interval of ___________ sec. in WC EDM.[A ]
a) 10 – 30 b) 20 – 30 c) 25 – 30 d) all
19.Spark frequency in WC EDM is ____________ KHZ. [C]
a) 200 – 500 b) 100 – 200 c) 50 – 100 d) none
20.MRR in WC EDM __________ mm3 / sec. [A]
a) 15 -80 b) 10 – 15 c) 50 – 60 d) all
UNIT-VI
1. Mechanism of material removal in Electron Beam Machining is due to (d)
a) Mechanical erosion due to impact of high of energy electrons
b) Chemical etching by the high energy electron
c) Sputtering due to high energy electrons
d) Melting and vaporisation due to thermal effect of impingement of high energy
electron
2. Mechanism of material removal in Laser Beam Machining is due to (c)
a) Mechanical erosion due to impact of high of energy photons
b) Electro-chemical etching
c) Melting and vaporisation due to thermal effect of impingement of high energy
laser beam
d) Fatigue failure
3. Generally Electron Beam Gun is operated at (d)
a) Atmospheric pressure
b) At 1.2 bar pressure above atmosphere
c) At 10 – 100 mTorr pressure
d) At 0.01 – 0.001 mTorr pressure
4. Laser Beam is produced due to (D)
a) Spontaneous emission
b) Stimulated emission followed by spontaneous emission
c) Spontaneous emission followed by Spontaneous absorption
d) Spontaneous absorption leading to “population inversion” and followed by
stimulated emission
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 252
Dept. of MECH
5. acts as the main lasing medium(C)
a) Nitrogen b) Helium c) CO2 d) none
6. helps cooling the gases in CO2 laser. (A)
a) Helium b) Nitrogen c) CO2 d) none
7. EBM and LBM are typically used with power density to machine materials.(A)
a)higher b)lower c) moderate d) none
8. Electron beam is generated in an . (B)
a) Light b) electron beam gun c) laser d) none
9. is required to be carried out in vacuum. (A)
a) EBM b) LBM c) Both d) none
10. The kinetic energy of the high velocity electrons is converted to as the electrons
strike the work material. (B)
a)heat energy b) potential energy c) internal energy d) none
11. Holes can be drilled in thin sheets using a (B)
a)multi pulse b) single pulse c) triple pulse d) none
12. vacuum is achieved and maintained using a [C]
a)rotary pump b) diffusion pump c) both d) none
13. The cathode is generally made of [C]
a)tungsten b) tantalum c) tungsten or tantalum d) none
14. Electron Beam Machining process parameters are [D]
a) Power density b) beam current c) Power per pulse d) all
15. Increasing the beam current directly the energy per pulse. [A]
a)increases b) decreases c) not changed d) none
16. Laser stands for [A]
a) light amplification by stimulated emission of radiation
b) light ammeter by stimulated emission of radiation
c) light amplification by stimulated emission of radiator
d) none
17. The working principle of laser was first put forward by [A ]
a) Albert Einstein b) A. P. J.AbdulKalam c)Thomas Alva Edison d) Thomson
18. The generally used gas lasers are [C]
a) Helium – Neon b) Argon c) all d) CO
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 253
Dept. of MECH
19. Lasers can be operated in [A]
a) continuous mode or pulsed mode b) pulsed mode c) continuous mode d) none
20. The power of a CO2 laser is typically around per metre of tube length. [A]
a) 100W b) 100KW c) 10W d)1000W
UNIT-VII
1.Inmachining a continuous arc is generated between a hot tungstencathode and the
water-cooled copper anode. [A ]
a) Plasma b)EDM c) LBM d)USM
2. Gas mixture of 80% nitrogen and 20% oxygenis used, the machining rate of mild steel
is increased by about [B ]
a) 30% b) 25% c)40% d)15%
3. Only ionized gas (plasma) is emitted as a jet causing temperature as high as [A ]
a) 16,600°C b)15,000°C c) 13,000°C d)15,500°C
4. For machining stainless steel, aluminum and other nonferrous metals, is often used as a
shielding gas. [A ]
a) hydrogen b) oxygen c) argon d) none
5. Types of tools are required in CHM are [ D]
a) maskants b) scribing templates c) etchants d) all
6. Synthetic or rubber base materials are frequently used for [A]
a) maskants b) scribing templates c) etchants d)none
7.are the substances used for covering the parts of the workpiece that are not to be
machined. [B]
a) scribing templates b maskants) c) etchants d)none
8. Etchants are used in chemical machining for achieving [ C]
a) good surface finish b) maximum MRR c) both d) none
9. Etchants which are commonly used are [ D]
a) chromic acid b) copper c) caustic and acid solutions d) all
10.The edges of the workpieces cut by PBM are often [ C]
a) flat b) squared c) beveled d) none
11. The cut edge of the material tends to be than the base material. [A ]
a) harder b) smoother c) moderate d) none
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 254
Dept. of MECH
12. PBM needs energy to operate. [A ]
a) lessb) more c) doesn’t require d) none
13. The cooling effect of water is reported to [ C]
a) reducethe width of the cutting zone
b) improve the quality of cut
c)both
d)none
14.does not depend on a chemical reaction between the gas and the work metal. [ C]
a) ECM b)CHM c) plasma arc d) none
15. Velocity of plasma jet [A ]
a) 500 m/s b) 600 m/s c) 700 m/s d) none
16. Maskants should, possess which of the following properties [ D]
a) Be tough enough to withstand handling
b) Adhere well to the workpiece surface
c) Scribe easily
d) all
17.Modes used in PAM are [ D]
a)turbulent mode
b)laminar mode
c)non-trasferred arc mode
d)all
18.Which are the applications of chemical machining [C]
a) production of stepped bars
b) taper sheets and performed shapes
c)Both A and B
d) none
19. While designing the torches, which terms are considered. [D ]
a) size of cathode
b) Convergence of nozzle
c) electrode gap and cooling of electrodes
d) all
20.In PAM, the deepness of heat affected zone is generally depends upon [D ]
a) material of workpiece
b) thickness of workpiece
c) cutting speed
d) all
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 255
Dept. of MECH
UNIT-VIII
1) In Electro Stream Drilling, dilute solution of which are used as electrolyte. ( C )
a)HCl b)H2SO4 c)both d)none
2)The voltage used during ESD is ( A )
a)150-850V b)1000V c)700-900V d)500-1000V
3)The voltage used during Shaped Tube Electrolyte Machining(STEM) is ( A )
a)5-15V b)20-30V c)15-30V d) none
4)In STEM,Servo system is used to maintain a constant gap between (B )
a)workpiece & tank b)workpiece & tool c)wokpiece & heater d) none
5)Surface finish depends upon (C )
a)workpiece material b)machining parameters c) Both a&b d)none
6)Electrolyte normally used in STEM is concentration of H2SO4 or HCl in water.
( A )
a) 10% b)20% c) 30% d)40%
7) IEG stands for (A )
a) Inter Electrode Gap
b)Inter Electrolyte Gap
c)Inter Emitted Gas
d)none
8)To drill very small holes at steep angles or curved holes by using ( A)
a)Electro Stream Drilling (ESD)
b)USM
c) AJM
d)none
9)Abrasive Flow Machining( AFM) process is used for finishing (D )
a)removing recast layer after EDM
b)finishing of extrusion dies
c)nozzle of flame cutting torch
d)all
10)Finishing operations usually cost approximately of the total machining cost
in a production cycle. ( A )
a)15% b)20% c)30% d)40%
11)Electro Stream Drilling (ESD) has hole entrance. ( A)
a)bell mouth
b)taper mouth
c)solid
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 256
Dept. of MECH
d) none
12)In Electro Stream Drilling (ESD) workpiece has (A )
a)+ve charge b) - be charge c) neutral d) none
13) In Shaped Tube Electrolyte Machining(STEM) process temperature of electrolyte is
(C )
a)10-20 b)20-30 c)37-40 d) none
14)In MAF process Unbonded magnetic abrasives yield ( C )
a)lower removal rates
b) medium removal rates
c)higher removal rates
d) none
15) In MAF process, Machined depth with increase in magnetic flux density
and iron particle size. (A )
a) increases b) decreases c) doesn't change d) none
16)In MAF process, better surface finish is obtained by using ( B )
a)Unbonded magnetic abrasives
b)Bonded magnetic abrasives
c)Unbonded abrasives
d)none
17)Machined depth with increase in working clearance. ( B)
a)increases b)decreases c)doesn't change d)none
18)Abrasive Flow Machining(AFM) process elements are ( D )
a)machine b)tooling c)media d)all
19)Types of abrasives are ( D )
a)Al2O3 b)SiC c)Cubic Boron Nitride(CBN) d)all
20)Abrasive Flow Machining(AFM) process variables are ( D )
a)workpiece material
b)machine and tooling
c)abrasive type,size& concentration
d)all
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 257
Dept. of MECH
14. 12 TUTORIAL QUESTIONS:
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-I
Tutorials
Short Answer Questions
Compare the mechanical and electrical energy
process in terms of physical parameters, shape
1 Knowledge a
capabilities, process capabilities and process
economy.
Discuss the needs for unconventional machining
2 Knowledge b
process.
Compare conventional and unconventional
3 Analysis e
machining processes.
Explain the classification of unconventional
4 comprehension c
machining processes.
What do you understand by chip less machining and
5 what harmful effect may such machining have? comprehension a
Explain.
Compare among various non-traditional machining
processes in terms of the
6 Knowledge a
Cavity-sinking (through) operation
Compare the mechanical and electrical energy
7 processes in terms ofphysical parameters. Shape Knowledge a
capabilities
Explain the reasons for the development of
8 Analysis a
Unconventional Machining Process.
Compare between traditional and unconventional
9 machining processes in Analysis a
terms of cost,
Show different non-conventional processes, present
10 in the form of a table, various process parameters Knowledge b
recommended.
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-I
Tutorials
Long Answer Questions
Describe the technical and economical reasons why
1 Knowledge a
Unconventional machining processes are necessary
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 258
Dept. of MECH
Explain the aspects to be considered before selection
2 the machining process. Knowledge a
Explain the advantages of Non-traditional machining
3 Analysis a
processes.
Describe the characteristic features of modern
comprehen
4 machining processes that distinguishthem from b
sion
conventional machining processes.
Discuss the limitations of Non-traditional machining comprehen
5 a
processes. sion
List the disadvantages of Modern machining
6 Knowledge b
processes over conventional machining process.
7 Describe the need for modern machining process. Knowledge e
List the general disadvantages of traditional
8 Analysis c
machining process.
Explain the reasons why the unconventional
9 machining processes are used. Analysis a
Explain the need for the use of unconventional
10 machining processes compared to the Knowledge a
conventional ones.
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-II
Short Answer Questions
Explain various elements of ultrasonic machining.
1 Analysis b
List the advantages and disadvantages of ultrasonic comprehens
2 a
machine. ion
Explain the process of ultrasonic machining. comprehens
3 b
ion
4 List out applications and limitations of USM. Analysis e
Explain how the grain size of abrasives influence
5 Knowledge b
surface finish in ultrasonic machining.
Describe about the recent developments in ultrasonic comprehens
6 a
machining? ion
Explain various factors erecting the material removal
7 Analysis b
rate in ultrasonic machining process.
Discuss about the various elements of ultrasonic
8 Knowledge e
machining process
Explain the working of an USM machine with the
9 Knowledge a
help of neat sketch.
Explain the applications and limitations of ultrasonic
10 Knowledge a
machining process
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 259
Dept. of MECH
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-II
Tutorials
Long Answer Questions
Explain Ultrasonic vibrations are generated using
1 Analysis b
magnetostriction method?
Discuss the model proposed by Shaw regarding the
2 comprehension a
MRR and obtain an expression for MRR?
3 Illustrate the mechanism of metal removal in USM? comprehension b
Explain different parameters that influence the
4 Analysis e
performance of USM?
Draw the schematic representation of ultrasonic
5 machining process and explain te functional Knowledge b
performance of tool feed mechanism.
Explain the functions of transducer and horns used in
6 comprehension b
USM. List the tools materials used.
Explain the working principle of the USM process with
7 Analysis a
its advantages and disadvantages.
Describe the effect of operating parameters on metal
8 Knowledge b
removal rate. List the applications of USM.
Explain the USM machine setup an discuss various
9 Knowledge e
feed mechanisms.
Discuss the influence process parameters and
10 Knowledge b
applications of USM
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-III
Tutorials
Short Answer Questions
Explain the process of abrasive jet machining? How is
1 Knowledge b
it different from sand blasting.
Explain the designed properties of abrasive materials
2 Knowledge e
used in abrasive jet machining.
Describe the effects of distance of nozzle from work on
3 Analysis b
the diameter of cut in abrasive let machining.
Distinguish between water jet machining and abrasive
4 comprehension a
water jet machining.
Explain the desired properties of abrasive materials
5 comprehension b
used in abrasive set machining ?
6 List out the limitations of Abrasive Jet machining? Knowledge e
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 260
Dept. of MECH
List various applications of AJM.
Explain the working of water jet machining. List its
7 Knowledge b
advantages over abrasive jet machining ?
Explain how material is removed in Abrasive Water Jet
8 Analysis e
Machining
Discuss the effects of the following parameters on
9 Analysis b
working accuracy and rate of metal removal of AJM
Explain the principle of AJM. Mention some of the
10 Knowledge a
specific applications.
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-III
Tutorials
Long Answer Questions
Explain the affect of the following parameters on the
metal removal rate in AJM.
1 Knowledge b
i) Velocity of fluid ii) Design of nozzle and iii)Stand
off distance
List out the practical applications of Water jet
2 Knowledge e
machining ?
Define mixing ratio? Explain the importance of
3 Analysis b
machining an optimum mixing ratio in AJM?
4 Explain the advantages of WJM? comprehension a
Determine operating parameters affect the machining
5 comprehension b
process in abrasive jet machining
Discuss in detail about the AJM process variables that
6 influence the rate of material removal and accuracy in Knowledge b
the machining.
Explain the method of AJM with help of schematic
7 Knowledge b
diagram.
8 List out the advantages and limitations of AJM. Analysis e
9 Explain the process parameters in WJM processs. Analysis b
Draw and explain the process of AJM .List its
10 Knowledge a
application and limitations.
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-IV
Tutorials
Short Answer Questions
Explain the process of electrochemical deburring
1 Analysis b
process.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 261
Dept. of MECH
2 Discuss about the economics of ECM. comprehension e
3 Explain the process of electro chemical grinding. comprehension b
Explain the factors which influence surface finish and
4 Analysis a
accuracy in ECM.
5 Explain the process of electro chemical grinding ? Knowledge b
Explain the process of Electro Chemical Deburring ?
6 comprehension b
why is it preferred over conventional de burring.
7 Explain the process of Electro chemical honing. Analysis e
Explain the principle of ECM with the help of neat
8 Knowledge b
sketch
Describe the factors that should be considered in
9 selecting the tool materials in ECM? Knowledge a
Describe the influence of Electro Chemical Machining
10 on the Mechanical properties of machined Knowledge b
components.?
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-IV
Tutorials
Long Answer Questions
Write short notes on the following:
(a) Electro chemical honing
1 Analysis b
(b) Tool design aspects of electro chemical machining
(c) Advantages and applications of chemical machining.
Describe the quality of machining and accuracies
2 comprehension e
obtainable in chemical machining
Compare the surface finish in Electro Chemical
3 Machining with that obtained by Chemical Machining. comprehension b
What are the reasons for obtaining the variations?
Discuss the basic principles of Electro chemical
4 Analysis a
machining using a neat sketch.
Summarize the functions of the electrolyte used in
5 Knowledge b
Electro chemical machining?
What are the main advantages, disadvantages and
6 comprehension e
applications of ECM process?
List the requirements of tool material for ECM. Write
7 Analysis b
the commonly used tool materials.
8 Describe the chemistry involved in ECM process. Knowledge a
Discuss about the effect of high temp and pressure of
9 Knowledge b
electrolyte onthe ECM process.
10 Discuss about the economics of ECM. Knowledge e
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 262
Dept. of MECH
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-V
Tutorials
Short Answer Questions
What do you understand by the term die-sinking in
1 Knowledge b
EDM
2 What are the tool electrodes used EDM. Knowledge e
Explain how to sink a square blind hole in tungsten
3 work end node using copper as tool electrode using Analysis b
electron discharge machining.
Explain about the hole drilling and surface machining
4 comprehension b
capabilities of electron Beam.
How machining rate is controlled in electron beam
5 comprehension e
machining.
Explain how the machine tool selections influence the
6 Knowledge b
characteristics of spark eroded surface.
7 Explain the principle of wire EDM? Knowledge a
Explain how the properties of electrolyte affect the
8 Analysis b
electro chemical machining.
What factors influence the solution of tool electrode
9 Analysis b
and dielectric fluids in EDM?
Briefly explain the working of an EDM machine
10 Knowledge e
showing important elements.
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-V
Tutorials
Long Answer Questions
Explain the principle of operation of metal removal in
1 Knowledge b
electro discharge machining operation.
List out the advantages and applications of EDM
2 Knowledge e
process?
3 Develop an expression for the MRR in EDM? Analysis b
Compare the various defects obtained in EDM and wire
4 comprehension a
EDM processes and mention the methods of elimination?
5 Classify the tools used in EDM process. comprehension b
Explain the principle of operation of metal removal in
6 Knowledge b
electro discharge machining operation.
7 What are the advantages and applications of EDM process Knowledge e
Explain the effect of Magnitude of current in MRR
8 Analysis b
during EDM
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 263
Dept. of MECH
9 Explain the effect of Capacitance. in MRR during EDM Analysis b
Sketch the Rotary pulse generator used in EDM process
10 Knowledge e
and mention its advantages over relaxation circuit.
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VI
Tutorials
Short Answer Questions
With the aid sketches compare and contrast laserbeam
1 Knowledge b
machining and electron beam machining.
2 What are various applications of laser beam machining. Knowledge e
Explain the working principles of electron beam
3 Analysis b
machining.
4 What are the applications of laser beam machining. comprehension b
On what factors the cutting speed and accuracy of cut
5 comprehension e
depends in EBM ?
Compare the laser beam and electron beam machining
6 processes on the basis of their applications and Knowledge b
limitations
What is laser and how it is used to machine the
7 Knowledge a
materials?
Describe, with the help of neat sketch, the constructional
8 features of an electron gun used for generating an Analysis b
electron beam in electron beam machining.
Explain the thermal features and analysis of laser beam
9 Analysis b
machining.
With the help of neat sketch explain the process of laser
10 Knowledge e
drilling.
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VI
Tutorials
Long Answer Questions
With a neat sketch explain the principle of operation of
EBM (Electron Beam Machining) and what are the
1 Knowledge b
advantages over baser beam machining (LBM)
operation.
Discuss about various forces acting of material in
2 Knowledge e
electron beam machining.
List the advantages, disadvantages limitations and
3 Analysis b
applications of laser beam machining
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 264
Dept. of MECH
Differentiate between EBM and LBM considering at
4 comprehension a
least five aspects?
Describe the suitability of LBM and its machining
5 comprehension b
performance, and industrial applications?
Differentiate between EBM and LBM considering at
6 Knowledge b
least five aspects?
Explain the construction and working of Electron Beam
7 Knowledge e
Machining process with neat sketch.
Describe the suitability of LBM and its machining
8 Analysis b
performance, and industrial applications?
What are the various LASERS used in practice for
9 Analysis b
machining and explain
10 Compare EBM and LBM on Machining rate Knowledge e
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VII
Short Answer Questions
Discuss the main industrial applications of plasma cutting
1 Knowledge b
Sytems.
2 What are the advantages of plasma cutting process. Knowledge e
3 Discuss various industrial applications of plasma cutting systems.
Analysis b
4 What are the advantages of plasma process comprehension b
Explain in detail various industrial applications of plasma
5 comprehension e
machining?
With a mat sketch explain the closed loop hydraulic circuit used
6 Knowledge b
in EDM?
Explain in detail the process parameters which influence plasma
7 Knowledge a
machining?
Distinguish between laser beam machining and electrode beam
8 Analysis b
machining
What are the specific advantages of chemical machining over
9 Analysis b
electrochemical machining?
Discuss the important considerations in the design of a
10 Knowledge e
plasma torch.
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VII
Tutorials
Long Answer Questions
Discuss the metal removal mechanism in plasma
1 Knowledge b
machining.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 265
Dept. of MECH
Explain the principle and operation of chemical
2 Knowledge e
machining using sketches
List the advantages and applications of chemical
3 Analysis b
machining
Describe the quality of machining and accuracies
4 comprehension a
obtainable in chemical Machining?
Compare the various Etchants used in chemical
5 comprehension b
machining? Mention their characteristics?
What are the advantages of water circulation in the torch
6 Knowledge b
of the PAM?
Why the surface finish and tolerance obtained are poor in
7 Knowledge e
plasma Arc machining?
What is Etch factor and how can it be controlled in
8 Analysis b
chemical machining?
9 What are the disadvantages of plasma cutting process Analysis b
What are the various Etchants mention their
10 Knowledge e
characteristics?
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VIII
Tutorials
Short Answer Questions
1 Write short note on the Abrasive flow finishing Knowledge b
Write short note on the Etchants in chemical machining
2 Knowledge b
process
3 Write short note on the Wire EDM Knowledge b
Write short note on the following Magnetic abrasive
4 comprehension b
finishing.
With the help of neat sketch explain the magnetic
5 abrasive finishing process. What are its advantages and comprehension e
limitations.
Describe the abrasive flow finishing process with the
6 help of neat sketch. Explain how it differs from abrasive Knowledge b
jet machining.
Explain the process of electro-stream drilling with the
7 help of neat sketch. Discuss the differences of the Knowledge a
process with electron beam machining.
What is shaped tube electrolyte machining? Describe the
8 process with the help of neat sketch. What are its Analysis b
applications?
With the help of a neat sketch explain the basic principle
9 of working, advantages, disadvantages, limitations and Analysis b
applications of radial extrusion.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 266
Dept. of MECH
10 What the salient features of AFM Knowledge e
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VIII
Tutorials
Long Answer Questions
Derive an Expression for material removal rate in MAF
1 Knowledge b
process?
Define hydraulic forming? With the help of a neat sketch
2 Knowledge e
explain the electro hydraulic forming process.
List the various materials, size of abrasives and magnetic
3 Analysis b
particles used in MAF
Comment on re-use of abrasive particles and their effect
4 comprehension a
on the quality of surfaces?
Explain the internal finishing of surfaces by magnetic
5 comprehension b
abrasive Process with a neat sketch
Derive an expression for the pressure to be applied by the
6 Knowledge b
hydraulic system in hydrostatic extrusion
How the restriction offered bypass way governs MRR
7 Knowledge e
and quality of surface produces in AFM?
What are the various materials, size of abrasives and
8 Analysis b
magnetic particles used in MAF?
Describe with a neat sketch, the effect of the gap filling
9 density and clearance between surfaces on the quality of Analysis b
surfaces produced?
10 Write short note on the following Electro stream drilling Knowledge e
14. 13 ASSIGNMENT QUESTIONS:
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-I
Assignments
Short Answer Questions
Compare among various non-traditional machining
1 processes in terms of the Cavity-sinking (through) Knowledge a
operation
Discuss the needs for unconventional machining
2 Knowledge b
process.
Compare conventional and unconventional machining
3 Analysis e
processes.
Explain the reasons for the development of
4 comprehension c
Unconventional Machining Process.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 267
Dept. of MECH
Show different non-conventional processes, present in
5 the form of a table, various process parameters comprehension a
recommended.
Compare the mechanical and electrical energy process
6 in terms of physical parameters, process economy. Knowledge a
Compare the mechanical and electrical energy
7 processes in terms of physical parameters. Shape Knowledge a
capabilities
Explain the classification of unconventional machining
8 Analysis a
processes.
Compare between traditional and unconventional
9 Analysis a
machining processes in terms of cost,
What do you understand by chip less machining and
10 Knowledge b
what harmful effect may such machining have? Explain
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-I
Long Answer Questions
Discuss the limitations of Non-traditional machining
1 Knowledge a
processes.
Describe the characteristic features of modern
2 machining processes that distinguish them from Knowledge a
conventional machining processes
Explain the advantages of Non-traditional machining
3 Analysis a
processes.
Explain the aspects to be considered before selection the
4 comprehension b
machining process.
Describe the technical and economical reasons why
5 comprehension a
Unconventional machining processes are necessary
Explain the advantages of Non-traditional machining
6 Knowledge b
processes.
Discuss the limitations of Non-traditional machining
7 Knowledge e
processes
Describe the characteristic features of modern
8 Analysis c
machining processes?
Explain the reasons that lead to the development of
9 Analysis a
UCMP?
10 Illustrate the technical and economical reasons why Knowledge a
UCMP are necessary?
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 268
Dept. of MECH
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-II
Short Answer Questions
Describe about the recent developments in ultrasonic
1 Analysis b
machining?
List the advantages and disadvantages of ultrasonic
2 comprehension a
machine.
Explain the working of an USM machine with the help of
3 comprehension b
neat sketch
Discuss about the various elements of ultrasonic
4 Analysis e
machining process
Explain the applications and limitations of ultrasonic
5 Knowledge b
machining process
6 Explain various elements of ultrasonic machining. comprehension a
Explain various factors erecting the material removal rate
7 Analysis b
in ultrasonic machining process.
8 List out applications and limitations of USM. Knowledge e
9 Explain the process of ultrasonic machining.. Knowledge a
Explain how the grain size of abrasives influence surface
10 Knowledge a
finish in ultrasonic machining.
Blooms
Questions Taxonomy Course
Sl.No. Level Outcome
UNIT-II
Assignments
Long Answer Questions
Explain Ultrasonic vibrations are generated using
1 Analysis b
magnetostriction method?
Discuss the model proposed by Shaw regarding the
2 comprehension a
MRR and obtain an expression for MRR?
3 Illustrate the mechanism of metal removal in USM? comprehension b
Explain different parameters that influence the
4 Analysis e
performance of USM?
Draw the schematic representation of ultrasonic
5 machining process and explain te functional performance Knowledge b
of tool feed mechanism.
List out the important applications of USM process with
6 comprehension b
a neat sketch?
Discuss the model proposed by Shaw regarding the MRR
7 Analysis a
and obtain an expression for MRR?
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 269
Dept. of MECH
Explain different parameters that influence the
8 Knowledge b
performance of USM?
Describe any two types of tool feed system used in
9 Knowledge e
USM?
Summarize the design procedure for exponential
10 concentrator of rectangular cross section in USM Knowledge b
system?
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-III
Assignments
Short Answer Questions
Distinguish between water jet machining and abrasive
1 Knowledge b
water jet machining.
Explain the designed properties of abrasive materials
2 Knowledge e
used in abrasive jet machining.
List out the limitations of Abrasive Jet machining? List
3 Analysis b
various applications of AJM.
Explain the process of abrasive jet machining? How is it
4 comprehension a
different from sand blasting.
Explain the desired properties of abrasive materials used
5 comprehension b
in abrasive set machining ?
Describe the effects of distance of nozzle from work on
6 Knowledge e
the diameter of cut in abrasive let machining.
Explain the principle of AJM. Mention some of the
7 Knowledge b
specific applications.
Explain how material is removed in Abrasive Water Jet
8 Analysis e
Machining
Discuss the effects of the following parameters on
9 Analysis b
working accuracy and rate of metal removal of AJM
Explain the working of water jet machining. List its
10 Knowledge a
advantages over abrasive jet machining ?
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-III
Long Answer Questions
Explain the affect of the following parameters on the
metal removal rate in AJM.
1 Knowledge b
i) Velocity of fluid ii) Design of nozzle and iii)Stand
off distance
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 270
Dept. of MECH
List out the practical applications of Water jet machining
2 Knowledge e
?
Define mixing ratio? Explain the importance of
3 Analysis b
machining an optimum mixing ratio in AJM?
4 Explain the advantages of WJM? comprehension a
Determine operating parameters affect the machining
5 comprehension b
process in abrasive jet machining
Explain the affect of the following parameters on the
metal removal rate in AJM.
6 Knowledge b
i) Velocity of fluid ii) Design of nozzle and iii)Stand
off distance
List out the practical applications of Water jet machining
7 Knowledge b
?
Define mixing ratio? Explain the importance of
8 Analysis e
machining an optimum mixing ratio in AJM?
9 Discuss the Principle and operation of AJM Analysis b
Justify the importance of machining an optimum mixing
10 Knowledge a
ratio in AJM?
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-IV
Assignments
Short Answer Questions
1 Explain the process of electro chemical grinding ? Analysis b
2 Discuss about the economics of ECM. comprehension e
3 Explain the process of Electro chemical honing. comprehension b
Explain the factors which influence surface finish and
4 Analysis a
accuracy in ECM.
Explain the process of electrochemical deburring
5 Knowledge b
process.
Describe the factors that should be considered in
6 comprehension b
selecting the tool materials in ECM?
7 Explain the process of electro chemical grinding. Analysis e
Explain the principle of ECM with the help of neat
8 Knowledge b
sketch
Explain the process of Electro Chemical Deburring ?
9 why is it preferred over conventional de burring. Knowledge a
Describe the influence of Electro Chemical Machining
10 Knowledge b
on the Mechanical properties of machined components.?
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 271
Dept. of MECH
Blooms
Course
l.No. Questions Taxonomy
Outcome
Level
UNIT-IV
Assignments
Long Answer Questions
Write short notes on the following:
(a) Electro chemical honing
1 Analysis b
(b) Tool design aspects of electro chemical machining
(c) Advantages and applications of chemical machining.
Describe the quality of machining and accuracies
2 comprehension e
obtainable in chemical machining
Compare the surface finish in Electro Chemical
3 Machining with that obtained by Chemical Machining. comprehension b
What are the reasons for obtaining the variations?
Discuss the basic principles of Electro chemical
4 Analysis a
machining using a neat sketch.
Summarize the functions of the electrolyte used in
5 Knowledge b
Electro chemical machining?
Define ECM? What is its importance in machining
6 comprehension e
process? Discuss its applications in detail.
State Etch factor and how can it be controlled in
7 Analysis b
chemical machining process?
8 Explain the applications of ECG? Knowledge a
Specify the materials commonly used for making a tool
9 Knowledge b
for use in ECM process? Why ?
Compare the quality of surfaces produced is poor in
10 Knowledge e
chemical machining when compared to ECM?
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-V
Short Answer Questions
1 What do you understand by the term die-sinking in EDM Knowledge b
What factors influence the solution of tool electrode and
2 Knowledge e
dielectric fluids in EDM?
3 Explain the principle of wire EDM? Analysis b
Explain about the hole drilling and surface machining
4 comprehension b
capabilities of electron Beam.
Explain how the properties of electrolyte affect the
5 comprehension e
electro chemical machining.
6 Explain how the machine tool selections influence the Knowledge b
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 272
Dept. of MECH
characteristics of spark eroded surface.
Explain how to sink a square blind hole in tungsten
7 work end node using copper as tool electrode using Knowledge a
electron discharge machining.
How machining rate is controlled in electron beam
8 Analysis b
machining.
9 What are the tool electrodes used EDM. Analysis b
Briefly explain the working of an EDM machine
10 Knowledge e
showing important elements.
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-V
Long Answer Questions
Explain the principle of operation of metal removal in
1 Knowledge b
electro discharge machining operation.
List out the advantages and applications of EDM
2 Knowledge e
process?
3 Develop an expression for the MRR in EDM? Analysis b
Compare the various defects obtained in EDM and wire
4 comprehension a
EDM processes and mention the methods of elimination?
5 Classify the tools used in EDM process. comprehension b
Differentiate between electro discharge grinding and
6 Knowledge b
wire EDM process
Discuss the nature of inaccuracies of machined surfaces
7 Knowledge e
obtained by EDM and WEDM processes
Draw the Rotary pulse generator used in EDM process
8 Analysis b
and mention its advantages over Relaxation circuit.
List out the advantages and applications of EDM
9 Analysis b
process?
Describe about the importance of supply voltage, break
10 down voltage, Charging resistance, gap setting and die Knowledge e
electric strength of gap in EDM
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VI
Assignments
Short Answer Questions
Describe, with the help of neat sketch, the constructional
1 features of an electron gun used for generating an Knowledge b
electron beam in electron beam machining.
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 273
Dept. of MECH
With the help of neat sketch explain the process of laser
2 Knowledge e
drilling.
Explain the thermal features and analysis of laser beam
3 Analysis b
machining.
4 What are the applications of laser beam machining. comprehension b
On what factors the cutting speed and accuracy of cut
5 comprehension e
depends in EBM ?
Compare the laser beam and electron beam machining
6 processes on the basis of their applications and Knowledge b
limitations
What is laser and how it is used to machine the
7 Knowledge a
materials?
With the aid sketches compare and contrast laserbeam
8 Analysis b
machining and electron beam machining.
Explain the working principles of electron beam
9 Analysis b
machining.
10 What are various applications of laser beam machining. Knowledge e
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VI
Assignments
Long Answer Questions
With a neat sketch explain the principle of operation of
1 EBM (Electron Beam Machining) and what are the Knowledge b
advantages over baser beam machining (LBM) operation.
Discuss about various forces acting of material in
2 Knowledge e
electron beam machining.
List the advantages, disadvantages limitations and
3 Analysis b
applications of laser beam machining
Differentiate between EBM and LBM considering at
4 comprehension a
least five aspects?
Describe the suitability of LBM and its machining
5 comprehension b
performance, and industrial applications?
Compare EBM and LBM on the following aspects:
6 Knowledge b
i. Machining rate ii. Tool wear rate iii. Accuracy.
Explain the construction and working of Electron Beam
7 Knowledge e
Machining process with neat sketch
Describe the suitability of LBM and its machining
8 Analysis b
performance, and industrial applications?
Summarize How does vacuum and heating of cathode
9 Analysis b
help the performance of electron beam?
Illustrate the thermal features of melting and evaporation
10 Knowledge e
process in LBM?
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 274
Dept. of MECH
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VII
Assignments
Short Answer Questions
What are the specific advantages of chemical machining over
1 Knowledge b
electrochemical machining?
With a mat sketch explain the closed loop hydraulic circuit used
2 Knowledge e
in EDM
Explain in detail the process parameters which influence plasma
3 Analysis b
machining?
4 What are the advantages of plasma process comprehension b
Explain in detail various industrial applications of plasma
5 comprehension e
machining?
6 What are the advantages of plasma cutting process. ? Knowledge b
7 Discuss various industrial applications of plasma cutting systems
Knowledge a
Distinguish between laser beam machining and electrode beam
8 Analysis b
machining
Discuss the main industrial applications of plasma cutting
9 Analysis b
Sytems.
Discuss the important considerations in the design of a
10 Knowledge e
plasma torch.
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VII
Assignments
Long Answer Questions
Explain the advantages of dual gas and water injected
1 Knowledge b
plasma torch
Describe the quality of machining and accuracies
2 Knowledge e
obtainable in chemical Machining?
Analyze the surface finish and tolerance obtained are
3 Analysis b
poor in plasma Arc machining?
Describe the quality of machining and accuracies
4 comprehension a
obtainable in chemical Machining?
Classify the various Etchants used in chemical
5 comprehension b
machining? Mention their characteristics?
Compare the various Etchants used in chemical
6 Knowledge b
machining? Mention their characteristics
Discuss the metal removal mechanism in plasma
7 Knowledge e
machining.
8 Explain the principle and operation of chemical Analysis b
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 275
Dept. of MECH
machining using sketches
List out the advantages of water circulation in the torch
9 Analysis b
of the PAM?
List the advantages and applications of chemical
10 Knowledge e
machining
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VIII
Short Answer Questions
Discuss the differences of the process with electron beam
1 Knowledge b
machining.
With the help of a neat sketch explain the basic principle
2 of working, advantages, disadvantages, limitations and Knowledge b
applications of radial extrusion.
3 What is shaped tube electrolyte machining? Knowledge b
Write short note on the following Magnetic abrasive
4 comprehension b
finishing.
With the help of neat sketch explain the magnetic
5 comprehension e
abrasive
Describe the abrasive flow finishing process with the
6 help of neat sketch. Explain how it differs from abrasive Knowledge b
jet machining.
Explain the process of electro-stream drilling with the
7 Knowledge a
help of neat sketch.
8 Write short note on the Wire EDM? Analysis b
Write short note on the Etchants in chemical machining
9 Analysis b
process
10 What the salient features of AFM Knowledge e
Blooms
Course
Sl.No. Questions Taxonomy
Outcome
Level
UNIT-VIII
Long Answer Questions
Derive an Expression for material removal rate in MAF
1 Knowledge b
process?
Define hydraulic forming? With the help of a neat sketch
2 Knowledge e
explain the electro hydraulic forming process.
List the various materials, size of abrasives and magnetic
3 Analysis b
particles used in MAF
Comment on re-use of abrasive particles and their effect
4 comprehension a
on the quality of surfaces?
5 Explain the internal finishing of surfaces by magnetic comprehension b
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 276
Dept. of MECH
abrasive Process with a neat sketch
Describe the salient features of AFM and mention the
6 Knowledge b
process variables which Control MRR
Comment on re-use of abrasive particles and their effect
7 Knowledge e
on the quality of surfaces?
Explain the internal finishing of surfaces by magnetic
8 Analysis b
abrasive Process with a neat sketch
Describe the effect of bonded and unbounded magnetic
9 abrasive particles on the surface finish and material Analysis b
removal rate in MAF process?
Compare the various materials, size of abrasives and
10 Knowledge e
magnetic particles used in MAF?
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 277
Dept. of MECH
15.0 COMPUTER AIDED DESIGN & MANUFACTURING LAB
15.1.Syllabus
1.Drafting : Development of part drawings for various components in the form of
orthographic and
isometric. Representation of Dimensioning and tolerances scanning and plotting. Study of
script,
DXE AND IGES FILES.
2. Part Modeling : Generation of various 3D Models through Protrusion, revolve, shell
sweep.
Creation of various features. Study of parent child relation. Feature based and Boolean
based
modeling surface and Assembly Modeling. Study of various standard Translators. Design
simple
components.
3. a). Determination of deflection and stresses in 2D and 3D trusses and beams.
b). Determination of deflections component
and principal and Von-mises stresses in plane
stress, plane strain and Axisymmetric components.
c). Determination of stresses in 3D and shell structures (at least one example in each
case)
d). Estimation of natural frequencies and mode shapes, Harmonic response of 2D beam.
e). Steady state heat transfer Analysis of plane and Axisymmetric components.
4. a). Development of process sheets for various components based on tooling Machines.
b). Development of manufacturing and tool management systems.
c). Study of various post processors used in NC Machines.
d). Development of NC code for free form and sculptured surfaces using CAM packages.
e). Machining of simple components on NC lathe and Mill by transferring NC Code /
from a
CAM package. Through RS 232.
f) Quality Control and inspection
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 278
Dept. of MECH
16.0 PRODUCTION DRAWING PRACTICE & INSTRUMENTATION LAB
a.Production Drawing Practice
UNIT-1
Convential representation of materials – Convential representation of parts- screw joints,
Welded joints, Springs, gears, electrical, hydraulic and pneumatic circuits – methods of
indicating notes on drawings.
UNIT-II
Limits and Fits : Types of Fits, exercises involving selection / interpretation of fits and
estimation of limits from tables.
UNIT-III
Form and positional Tolerences : Introduction and Induction of the tolerance of from
and position on drawings, deformation of runout and total runout and their indication.
UNIT-IV
Surface roughness and its indication: Definitions - finishes obtainable from various
manufacturing processes, recommended surface roughness on mechanical components.
UNIT-V
Heat treatment and surface treatment symbols used on drawings.
UNIT-VI
Detailed and part drawings: Drawing of parts from assembly drawings with
indications of size, tolerance, roughness, form and position errors etc.
UNIT-VII
Part drawing using computer aided drafting by CAD software
TEXT BOOKS:
Production and Drawing – K.L. Narayana & P. Kannaiah/ New Age
Machine Drawing With Auto CAD Pohit and Ghosh, PE
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 279
Dept. of MECH
17. INSTRUMENTATION LAB
1. calibration of pressure gauges
2. calibration of resistance temperature detector for temperature measurement
3. calibration of thermister and rtd
4. calibration of thermocouple for temperature measurement
5. calibration of vibration setup
6. study and calibration of photo and magnetic speed pickups for the measurement
of speed
7. measurement of angular displacement using capacitive transducer
8. measurment of strain gauge
9. study and calibration of lvdt tranducer for displacement measurement
10. study and calibration of mcleod gauge for low pressure
MLR Institute of Technology,Dundigal,Hyderabad-500 043 Page 280
You might also like
- Module III - Sentence Correction 101Document94 pagesModule III - Sentence Correction 101Sreenesh BhatNo ratings yet
- Critical Reasoning - Professor's GuideDocument263 pagesCritical Reasoning - Professor's GuideDamián MeléndezNo ratings yet
- Sentence Correction 1.1Document48 pagesSentence Correction 1.1Abhishek2009GWUNo ratings yet
- SentancecorrectionDocument92 pagesSentancecorrectionAbhishek BhutoriaNo ratings yet
- Sentence CorrectionDocument19 pagesSentence CorrectionVinay SinghNo ratings yet
- GMAT Essential GrammarDocument47 pagesGMAT Essential GrammarSabuj MitraNo ratings yet
- GMAT Collection of Every SentenceDocument147 pagesGMAT Collection of Every SentencepontathesmithjapanNo ratings yet
- Sentence Correction AnswersDocument32 pagesSentence Correction Answersapi-3707411No ratings yet
- Maximizing Revenue at the JavaJointDocument59 pagesMaximizing Revenue at the JavaJointPrasant GoelNo ratings yet
- English QuestionsDocument156 pagesEnglish QuestionsGauriNo ratings yet
- Crack U ConceptsDocument72 pagesCrack U Conceptsrajkumarw93No ratings yet
- Introduction To Critical ReasoningDocument28 pagesIntroduction To Critical Reasoninganithaf0% (1)
- Ims Gqquest MaterialDocument240 pagesIms Gqquest MaterialkfreakNo ratings yet
- IIM Calcutta PGPEX 2015 Placement BrochureDocument56 pagesIIM Calcutta PGPEX 2015 Placement BrochureAnandSubbiahNo ratings yet
- Sentence Correction & Error Spotting: - Introduction - Rules To RememberDocument46 pagesSentence Correction & Error Spotting: - Introduction - Rules To RememberAnonymous St1j35DR05No ratings yet
- Engineering: Kidzsearch Safe Wikipedia For KidsDocument4 pagesEngineering: Kidzsearch Safe Wikipedia For KidsAriel SpallettiNo ratings yet
- Apptitute Reasoning BookDocument110 pagesApptitute Reasoning BookAditya RajanNo ratings yet
- 2016 General Awareness QuizDocument178 pages2016 General Awareness Quiz101010121212No ratings yet
- ReadingDocument165 pagesReadingapi-3705112100% (1)
- Format of The CRE ExaminationDocument24 pagesFormat of The CRE ExaminationRaistlin Chan Ching KitNo ratings yet
- Critical Reasoning Remaining TypesDocument8 pagesCritical Reasoning Remaining TypesNimish SinghNo ratings yet
- English GrammarDocument178 pagesEnglish GrammarPhätthÿnä HëngNo ratings yet
- Confusing Phrases: Agree: 1. Agree With: YouDocument38 pagesConfusing Phrases: Agree: 1. Agree With: Yousantosh_mnrNo ratings yet
- Oliveboard SSC English Language Ebook Part 2Document12 pagesOliveboard SSC English Language Ebook Part 2ponchy149435No ratings yet
- Reading Comprehension StrategiesDocument67 pagesReading Comprehension StrategiesKumar ChetanNo ratings yet
- GMAT SC GuideDocument86 pagesGMAT SC GuideJackNo ratings yet
- Demystified GMAT Quant CapsuleDocument14 pagesDemystified GMAT Quant CapsulePankaj DebnathNo ratings yet
- Le 5Document36 pagesLe 5HIRE100% (1)
- Behavioural Science Journal-For StudentsDocument8 pagesBehavioural Science Journal-For Studentskatarirajesh87No ratings yet
- Summative Math AssignmentDocument25 pagesSummative Math Assignmentapi-280269552No ratings yet
- Latest RC 2015Document117 pagesLatest RC 2015John DoeNo ratings yet
- NDA GK Questions SolvedDocument162 pagesNDA GK Questions Solvedamit34521No ratings yet
- 1540381429reading Comprehension OneDocument145 pages1540381429reading Comprehension OneSarvagya GuptaNo ratings yet
- Critical Reasoning QuestionsDocument12 pagesCritical Reasoning QuestionsRehan RathoreNo ratings yet
- Ielts Mock TestDocument59 pagesIelts Mock TestIelts Guru ReviewNo ratings yet
- Week 1 Introduction To Strategy Lecture SlidesDocument45 pagesWeek 1 Introduction To Strategy Lecture SlidesHamada BakheetNo ratings yet
- PM Exercise Solutions Session 1-6 CH 2-10Document47 pagesPM Exercise Solutions Session 1-6 CH 2-10sxywangNo ratings yet
- 5 Strategies That GMAT Uses To Distort Meaning - V3.0Document25 pages5 Strategies That GMAT Uses To Distort Meaning - V3.0newuser1234No ratings yet
- III. Performing Technical StudiesDocument18 pagesIII. Performing Technical StudiesMaris Putra PratamaNo ratings yet
- GK CapsuleDocument118 pagesGK CapsuleJai100% (1)
- Seema Brain Openers Kuruskhetra: Sure Shot Questions With Clear Answers To Crack Spoken Round of IeltsDocument56 pagesSeema Brain Openers Kuruskhetra: Sure Shot Questions With Clear Answers To Crack Spoken Round of IeltsSej PatelNo ratings yet
- Approximation For Ibps Po - Bsc4successDocument3 pagesApproximation For Ibps Po - Bsc4successAshutoshNo ratings yet
- Non ConventionalDocument5 pagesNon ConventionalSandeep JaglanNo ratings yet
- GRE Argu GRE Argu: James Jiang James JiangDocument35 pagesGRE Argu GRE Argu: James Jiang James JiangJames JiangNo ratings yet
- GMAT Demo Session Handout Jan 12 For Video Sessions 2 2Document1 pageGMAT Demo Session Handout Jan 12 For Video Sessions 2 2raviNo ratings yet
- ESC FAMILY (We Are Your Right ChoiceDocument25 pagesESC FAMILY (We Are Your Right ChoiceVlado PetricNo ratings yet
- 20 Practice Sets For IBPS Bank (WWW - Sarkaripost.in) PDFDocument208 pages20 Practice Sets For IBPS Bank (WWW - Sarkaripost.in) PDFNikita SabaleNo ratings yet
- GMAT QUANT PRACTICE PAPERDocument7 pagesGMAT QUANT PRACTICE PAPERSurya RNo ratings yet
- Engineering Computing Exam PaperDocument3 pagesEngineering Computing Exam Paperjogi_rmNo ratings yet
- The Cultural Influences of LanguageDocument6 pagesThe Cultural Influences of Languagemiy500_542116704No ratings yet
- Ron's Examples by RakibDocument136 pagesRon's Examples by RakibEd S Andy KrNo ratings yet
- 60 Rules of GrammarDocument211 pages60 Rules of GrammarPurwa DidmutheNo ratings yet
- Index: S.No Content Page NoDocument47 pagesIndex: S.No Content Page NoKrishna AgrawalNo ratings yet
- MSRIT Information Science CurriculumDocument45 pagesMSRIT Information Science CurriculumRishabh SinghNo ratings yet
- Msrit 3 YearDocument58 pagesMsrit 3 YearRishabh SinghNo ratings yet
- Final Ece-Sar (30.05.2013)Document200 pagesFinal Ece-Sar (30.05.2013)pragatinareshNo ratings yet
- MBA Placement Brochure 2009 - 10Document24 pagesMBA Placement Brochure 2009 - 10ramnikg100% (1)
- Msrit 4 YearDocument42 pagesMsrit 4 YearRishabh SinghNo ratings yet
- MBA Brochure DraftDocument24 pagesMBA Brochure DraftramnikgNo ratings yet
- Maulana Azad National Institute of TechnologyDocument4 pagesMaulana Azad National Institute of TechnologyNupur PalNo ratings yet
- 1-Robot Is Derived From Czech WordDocument10 pages1-Robot Is Derived From Czech WordprabhaNo ratings yet
- 50 MCQDocument10 pages50 MCQprabhaNo ratings yet
- MCQDocument5 pagesMCQprabhaNo ratings yet
- Hooks and Scoops: "A Suitable Suction Cup Is Available For Any JobDocument4 pagesHooks and Scoops: "A Suitable Suction Cup Is Available For Any JobprabhaNo ratings yet
- Basics of Robotics 24.06.2020Document25 pagesBasics of Robotics 24.06.2020prabhaNo ratings yet
- 50 MCQDocument10 pages50 MCQprabhaNo ratings yet
- Hooks and Scoops: "A Suitable Suction Cup Is Available For Any JobDocument4 pagesHooks and Scoops: "A Suitable Suction Cup Is Available For Any JobprabhaNo ratings yet
- Google Forms - MCQ PDFDocument18 pagesGoogle Forms - MCQ PDFprabhaNo ratings yet
- Google Forms - MCQ PDFDocument18 pagesGoogle Forms - MCQ PDFprabhaNo ratings yet
- Department of Mechanical EngineeringDocument23 pagesDepartment of Mechanical EngineeringprabhaNo ratings yet
- Sciencedirect: Fuel 279 (2020) 118520Document10 pagesSciencedirect: Fuel 279 (2020) 118520prabhaNo ratings yet
- PH D-RegulationDocument48 pagesPH D-Regulationkarthik sNo ratings yet
- Special Purpose GrippersDocument2 pagesSpecial Purpose GrippersprabhaNo ratings yet
- RecitDocument7 pagesRecitMARIABEVIELEN SUAVERDEZNo ratings yet
- Main Philosophical Trends in Early 19 CenturyDocument59 pagesMain Philosophical Trends in Early 19 CenturyGunjan JoshiNo ratings yet
- Module 3 Wed-Thurs.-Espolon, Joseph Paulo B.Document7 pagesModule 3 Wed-Thurs.-Espolon, Joseph Paulo B.IvAn ClavoNo ratings yet
- Aji - Webinar On Career in Armed Forces and Image ManagementDocument9 pagesAji - Webinar On Career in Armed Forces and Image ManagementruchiNo ratings yet
- Daily Report For-N-14673-0317Document1 pageDaily Report For-N-14673-0317jyothis_joy8315No ratings yet
- Your Adv Plus Banking: Account SummaryDocument7 pagesYour Adv Plus Banking: Account SummaryRafaelNo ratings yet
- Chapter 2 Quality Management SystemDocument38 pagesChapter 2 Quality Management SystemMARK CASANOVANo ratings yet
- Freight TerminologyDocument2 pagesFreight Terminologymoon_mohiNo ratings yet
- Air DeccanDocument46 pagesAir DeccanAnkit KhandelwalNo ratings yet
- Narrative & Accomplishment ReportDocument2 pagesNarrative & Accomplishment ReportJhayzen Villanueva100% (1)
- Générale of The Swiss Linguist Ferdinand de Saussure (1857-1913) - The Book Was Edited andDocument3 pagesGénérale of The Swiss Linguist Ferdinand de Saussure (1857-1913) - The Book Was Edited andOussamaNo ratings yet
- Rule 7 Type of OccupancyDocument3 pagesRule 7 Type of OccupancyabercrombieNo ratings yet
- FR Sky Taranis ManualDocument2 pagesFR Sky Taranis ManualtomislavNo ratings yet
- Jonathan Elias ResumeDocument2 pagesJonathan Elias Resumeapi-518262657No ratings yet
- Automatic Web Spreadsheet Data ExtractionDocument8 pagesAutomatic Web Spreadsheet Data ExtractionfinnNo ratings yet
- Odisha's First Sports Literature FestivalDocument58 pagesOdisha's First Sports Literature FestivalTathagat MohantyNo ratings yet
- Sierra Leone-Lomé Peace Agreement Ratification Act (1999) (E)Document39 pagesSierra Leone-Lomé Peace Agreement Ratification Act (1999) (E)Shalom AlexNo ratings yet
- Ookla Speedtest Methodology 2020Document19 pagesOokla Speedtest Methodology 2020saijayramNo ratings yet
- Master Time Table Wef 17-08-2018Document3 pagesMaster Time Table Wef 17-08-2018Hareesha N GNo ratings yet
- Socioeconomic, Political and Security HazardsDocument17 pagesSocioeconomic, Political and Security HazardsJulianne CentenoNo ratings yet
- Plate Tectonics Concept MapsDocument3 pagesPlate Tectonics Concept MapsCresty Lyn Caminos FormenteraNo ratings yet
- 2019Document164 pages2019Nguyễn Sơn CaNo ratings yet
- VerbatimDocument38 pagesVerbatimJonas CabusbusanNo ratings yet
- CSC Job Portal: Manila, NCR - NCRDocument1 pageCSC Job Portal: Manila, NCR - NCRAndroNo ratings yet
- SIM BrochureDocument2 pagesSIM BrochureschecmNo ratings yet
- АНГЛ МОВАDocument25 pagesАНГЛ МОВАИра РоманченкоNo ratings yet
- Statement of PurposeDocument2 pagesStatement of PurposePreeti KaurNo ratings yet
- National Cooperative Union of IndiaDocument148 pagesNational Cooperative Union of IndiaShweta AgrawalNo ratings yet
- SHRM Carrefour Group 12 B1Document43 pagesSHRM Carrefour Group 12 B1Faria AlamNo ratings yet
- Spot Report On Reckless Imprudence Resulting To Physical Injuries and Damage of PropertyDocument1 pageSpot Report On Reckless Imprudence Resulting To Physical Injuries and Damage of PropertyReynan Poculan82% (22)
- How to Talk to Anyone: Learn the Secrets of Good Communication and the Little Tricks for Big Success in RelationshipFrom EverandHow to Talk to Anyone: Learn the Secrets of Good Communication and the Little Tricks for Big Success in RelationshipRating: 4.5 out of 5 stars4.5/5 (1135)
- Summary: The 5AM Club: Own Your Morning. Elevate Your Life. by Robin Sharma: Key Takeaways, Summary & AnalysisFrom EverandSummary: The 5AM Club: Own Your Morning. Elevate Your Life. by Robin Sharma: Key Takeaways, Summary & AnalysisRating: 4.5 out of 5 stars4.5/5 (22)
- Learn Spanish While SleepingFrom EverandLearn Spanish While SleepingRating: 4 out of 5 stars4/5 (20)
- The 16 Undeniable Laws of Communication: Apply Them and Make the Most of Your MessageFrom EverandThe 16 Undeniable Laws of Communication: Apply Them and Make the Most of Your MessageRating: 5 out of 5 stars5/5 (72)
- Weapons of Mass Instruction: A Schoolteacher's Journey Through the Dark World of Compulsory SchoolingFrom EverandWeapons of Mass Instruction: A Schoolteacher's Journey Through the Dark World of Compulsory SchoolingRating: 4.5 out of 5 stars4.5/5 (149)
- Dumbing Us Down: The Hidden Curriculum of Compulsory SchoolingFrom EverandDumbing Us Down: The Hidden Curriculum of Compulsory SchoolingRating: 4.5 out of 5 stars4.5/5 (495)
- Summary: It Didn't Start with You: How Inherited Family Trauma Shapes Who We Are and How to End the Cycle By Mark Wolynn: Key Takeaways, Summary & AnalysisFrom EverandSummary: It Didn't Start with You: How Inherited Family Trauma Shapes Who We Are and How to End the Cycle By Mark Wolynn: Key Takeaways, Summary & AnalysisRating: 5 out of 5 stars5/5 (3)
- How to Improve English Speaking: How to Become a Confident and Fluent English SpeakerFrom EverandHow to Improve English Speaking: How to Become a Confident and Fluent English SpeakerRating: 4.5 out of 5 stars4.5/5 (56)
- Make It Stick by Peter C. Brown, Henry L. Roediger III, Mark A. McDaniel - Book Summary: The Science of Successful LearningFrom EverandMake It Stick by Peter C. Brown, Henry L. Roediger III, Mark A. McDaniel - Book Summary: The Science of Successful LearningRating: 4.5 out of 5 stars4.5/5 (55)
- Functional Training and Beyond: Building the Ultimate Superfunctional Body and MindFrom EverandFunctional Training and Beyond: Building the Ultimate Superfunctional Body and MindRating: 4.5 out of 5 stars4.5/5 (1)
- Summary: I'm Glad My Mom Died: by Jennette McCurdy: Key Takeaways, Summary & AnalysisFrom EverandSummary: I'm Glad My Mom Died: by Jennette McCurdy: Key Takeaways, Summary & AnalysisRating: 4.5 out of 5 stars4.5/5 (2)
- Summary: Greenlights: by Matthew McConaughey: Key Takeaways, Summary & AnalysisFrom EverandSummary: Greenlights: by Matthew McConaughey: Key Takeaways, Summary & AnalysisRating: 4 out of 5 stars4/5 (6)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4.5 out of 5 stars4.5/5 (1872)
- Summary: The Laws of Human Nature: by Robert Greene: Key Takeaways, Summary & AnalysisFrom EverandSummary: The Laws of Human Nature: by Robert Greene: Key Takeaways, Summary & AnalysisRating: 4.5 out of 5 stars4.5/5 (30)
- Summary: Trading in the Zone: Trading in the Zone: Master the Market with Confidence, Discipline, and a Winning Attitude by Mark Douglas: Key Takeaways, Summary & AnalysisFrom EverandSummary: Trading in the Zone: Trading in the Zone: Master the Market with Confidence, Discipline, and a Winning Attitude by Mark Douglas: Key Takeaways, Summary & AnalysisRating: 5 out of 5 stars5/5 (15)
- Financial Feminist: Overcome the Patriarchy's Bullsh*t to Master Your Money and Build a Life You LoveFrom EverandFinancial Feminist: Overcome the Patriarchy's Bullsh*t to Master Your Money and Build a Life You LoveRating: 5 out of 5 stars5/5 (1)
- Summary of The Power of Habit: Why We Do What We Do in Life and Business by Charles DuhiggFrom EverandSummary of The Power of Habit: Why We Do What We Do in Life and Business by Charles DuhiggRating: 4.5 out of 5 stars4.5/5 (261)
- Learn French: The Essentials You Need to Go From an Absolute Beginner to Intermediate and AdvancedFrom EverandLearn French: The Essentials You Need to Go From an Absolute Beginner to Intermediate and AdvancedNo ratings yet
- The Inequality Machine: How College Divides UsFrom EverandThe Inequality Machine: How College Divides UsRating: 4.5 out of 5 stars4.5/5 (17)
- Whatever It Takes: Geoffrey Canada's Quest to Change Harlem and AmericaFrom EverandWhatever It Takes: Geoffrey Canada's Quest to Change Harlem and AmericaRating: 4 out of 5 stars4/5 (79)
- Little Soldiers: An American Boy, a Chinese School, and the Global Race to AchieveFrom EverandLittle Soldiers: An American Boy, a Chinese School, and the Global Race to AchieveRating: 4 out of 5 stars4/5 (25)
- Follow The Leader: A Collection Of The Best Lectures On LeadershipFrom EverandFollow The Leader: A Collection Of The Best Lectures On LeadershipRating: 5 out of 5 stars5/5 (122)
- You Are Not Special: And Other EncouragementsFrom EverandYou Are Not Special: And Other EncouragementsRating: 4.5 out of 5 stars4.5/5 (6)
- Weapons of Mass Instruction: A Schoolteacher's Journey Through the Dark World of Compulsory SchoolingFrom EverandWeapons of Mass Instruction: A Schoolteacher's Journey Through the Dark World of Compulsory SchoolingRating: 4 out of 5 stars4/5 (59)