You might also like
- BMW IKE E38 E39 E53 Instrument Cluster ElectronicsDocument23 pagesBMW IKE E38 E39 E53 Instrument Cluster ElectronicsBahjat Merhy100% (2)
- P0123-Throttle Position Sensor 1 Circuit High: 2008 Jeep Patriot Limited 2008 Jeep Patriot LimitedDocument10 pagesP0123-Throttle Position Sensor 1 Circuit High: 2008 Jeep Patriot Limited 2008 Jeep Patriot Limitedjoverjover1No ratings yet
- How To Use EASA's Internal Connection Diagrams: 6 PoleDocument1 pageHow To Use EASA's Internal Connection Diagrams: 6 PolesebastianNo ratings yet
- CSI 2130 CSI 2130: Machinery Health™AnalyzerDocument42 pagesCSI 2130 CSI 2130: Machinery Health™Analyzersebastian100% (2)
- Remanufacturing Automotive Mechatronics & ElectronicsDocument122 pagesRemanufacturing Automotive Mechatronics & ElectronicsFranjo PavlovićNo ratings yet
- US6087796 Vel+fluxDocument16 pagesUS6087796 Vel+fluxsebastianNo ratings yet
- DECIMATOR ARCHITECTUREDocument8 pagesDECIMATOR ARCHITECTUREEmer nelsonNo ratings yet
- United States Patent (19) : 11 Patent Number: 5,755,291 45) Date of Patent: May 26, 1998Document21 pagesUnited States Patent (19) : 11 Patent Number: 5,755,291 45) Date of Patent: May 26, 1998Justus VenterNo ratings yet
- Electronic Kanban Worksheet For The Design and Implementation of Virtual or Electronic Kanban SystemsDocument33 pagesElectronic Kanban Worksheet For The Design and Implementation of Virtual or Electronic Kanban SystemsMostafa FawzyNo ratings yet
- Monitor Movement Device Alerts When Person Leaves AreaDocument12 pagesMonitor Movement Device Alerts When Person Leaves AreaMelin Yohana SitioNo ratings yet
- Accoustic Induced VibrationDocument10 pagesAccoustic Induced VibrationcpsankarNo ratings yet
- United States Patent 19: 45 Date of Patent: Jul. 14, 1998Document16 pagesUnited States Patent 19: 45 Date of Patent: Jul. 14, 1998sudeep kumarNo ratings yet
- United States Patent (19) : 11) Patent Number: 4,864,547 (45) Date of Patent: Sep. 5, 1989Document18 pagesUnited States Patent (19) : 11) Patent Number: 4,864,547 (45) Date of Patent: Sep. 5, 1989mohasNo ratings yet
- United States Patent (10) Patent No.: US 7.879,613 B2: Speranza Et Al. (45) Date of Patent: Feb. 1, 2011Document13 pagesUnited States Patent (10) Patent No.: US 7.879,613 B2: Speranza Et Al. (45) Date of Patent: Feb. 1, 2011anwikusumaNo ratings yet
- Patent Application Publication (10) Pub. No.: US 2007/0053466A1Document19 pagesPatent Application Publication (10) Pub. No.: US 2007/0053466A1kernexNo ratings yet
- Automatic Voltage Regulating System for Engine GeneratorDocument8 pagesAutomatic Voltage Regulating System for Engine GeneratorBruno LambertNo ratings yet
- Servomotores DCDocument20 pagesServomotores DCarmando luis rois peñarandaNo ratings yet
- Bn-Ye Nane: N2KkntDocument4 pagesBn-Ye Nane: N2KkntMichael MurphyNo ratings yet
- US8655272Document15 pagesUS8655272Carlos OrtegaNo ratings yet
- Fault Detection in Relay Drive Circuits for Process Control SystemsDocument14 pagesFault Detection in Relay Drive Circuits for Process Control SystemsAlexander Pozo Rosero DHNo ratings yet
- 2006 - Us7013991 - Obstacle Detection System For Underground OperationsDocument30 pages2006 - Us7013991 - Obstacle Detection System For Underground OperationsCường Nguyễn QuốcNo ratings yet
- United States Patent 19 11 Patent Number: 5,726,911: Canada Et Al. 45 Date of Patent: Mar. 10, 1998Document14 pagesUnited States Patent 19 11 Patent Number: 5,726,911: Canada Et Al. 45 Date of Patent: Mar. 10, 1998sebastianNo ratings yet
- U.S. Pat. 4,809,336, Semiconductor Amplifier With Tube Amplifier Characteristics, Pritchard, 1989.Document10 pagesU.S. Pat. 4,809,336, Semiconductor Amplifier With Tube Amplifier Characteristics, Pritchard, 1989.Duane BlakeNo ratings yet
- United States Patent: Matsushita Et AlDocument25 pagesUnited States Patent: Matsushita Et AlEl Kanouani ZakariaNo ratings yet
- Us6529169 PDFDocument8 pagesUs6529169 PDFFRANK NIELE DE OLIVEIRANo ratings yet
- United States Patent (10) Patent No.: US 6,725,039 B1: Parmar Et Al. (45) Date of Patent: Apr. 20, 2004Document7 pagesUnited States Patent (10) Patent No.: US 6,725,039 B1: Parmar Et Al. (45) Date of Patent: Apr. 20, 2004aduh haiNo ratings yet
- ( ) Notice: Subject To Any Disclaimer, The Term of This E. "C Issn 0. EDocument23 pages( ) Notice: Subject To Any Disclaimer, The Term of This E. "C Issn 0. EEmmanuel Avalos HuarteNo ratings yet
- Toll Road Toll Paying Method and ApparatusDocument26 pagesToll Road Toll Paying Method and ApparatusrdpalmaNo ratings yet
- United States PatentDocument7 pagesUnited States PatentSyed IzzatNo ratings yet
- US6185288Document36 pagesUS6185288arungarg_itNo ratings yet
- United States Patent: (10) Patent No.: US 6,957,339 B2Document43 pagesUnited States Patent: (10) Patent No.: US 6,957,339 B2Alex MungaiNo ratings yet
- Us 4458356Document8 pagesUs 4458356Kenny Rey GuillenNo ratings yet
- United States Patent: (12) (10) Patent No.: US 7,349,557 B2Document18 pagesUnited States Patent: (12) (10) Patent No.: US 7,349,557 B2Alex MungaiNo ratings yet
- US5103233Document78 pagesUS5103233shubhamNo ratings yet
- US5515029Document15 pagesUS5515029Carlos OrtegaNo ratings yet
- OffsetDocument6 pagesOffsethatimmarsouliNo ratings yet
- Patent for Multi-Level Interrupt Microprocessor SystemDocument33 pagesPatent for Multi-Level Interrupt Microprocessor SystemElectronical_DudeNo ratings yet
- United States Patent: (75) Inventors: Yoshiaki Saito, Hitachinaka (JP)Document9 pagesUnited States Patent: (75) Inventors: Yoshiaki Saito, Hitachinaka (JP)rahmat jalaluddinNo ratings yet
- United States Patent (10) Patent No.: US 6,664,656 B2: Bernier (45) Date of Patent: Dec. 16, 2003Document10 pagesUnited States Patent (10) Patent No.: US 6,664,656 B2: Bernier (45) Date of Patent: Dec. 16, 2003William Jaldin CorralesNo ratings yet
- DeterminantesDocument20 pagesDeterminantesFrancisco Javier AcostaNo ratings yet
- Us6944575Document49 pagesUs6944575Anonymous KiraNo ratings yet
- United States Patent (19) : Q K Rf/Audio 8-36 MHZ AmDocument5 pagesUnited States Patent (19) : Q K Rf/Audio 8-36 MHZ Amjohn ramseyNo ratings yet
- Infrared TransoucertransmitterDocument9 pagesInfrared TransoucertransmitterFava yavarNo ratings yet
- 交流电源测试装置和方法Document8 pages交流电源测试装置和方法4671 WenNo ratings yet
- Power Supply Controls Frequency and Voltage for Corona Discharge TreatmentDocument11 pagesPower Supply Controls Frequency and Voltage for Corona Discharge Treatmentaless2056No ratings yet
- Us 5228327Document32 pagesUs 5228327Aziz FassisNo ratings yet
- Machine Fault Detection Using Vibration Signal Peak DetectorDocument31 pagesMachine Fault Detection Using Vibration Signal Peak Detectordavison coyNo ratings yet
- US6029951, Varco, Control System For DrawworksDocument12 pagesUS6029951, Varco, Control System For DrawworksDhrubajyoti BoraNo ratings yet
- RXD7 Service ManualDocument71 pagesRXD7 Service ManualFerreirinha Andrade Luis CarlosNo ratings yet
- Us 4785300Document12 pagesUs 4785300MasoudNo ratings yet
- SEO-optimized title for US patent on microprocessor interrupt processingDocument28 pagesSEO-optimized title for US patent on microprocessor interrupt processingElectronical_DudeNo ratings yet
- Device Detection System Monitoring Removable MediaDocument21 pagesDevice Detection System Monitoring Removable MediaTrường Đăng NguyễnNo ratings yet
- United States Patent: (12) (10) Patent N0.: US 6,868,357 B2Document27 pagesUnited States Patent: (12) (10) Patent N0.: US 6,868,357 B2Bruno Paim TargaNo ratings yet
- Current Sensor DesingDocument10 pagesCurrent Sensor DesingEmer nelsonNo ratings yet
- Transormer For HV X RayDocument24 pagesTransormer For HV X RayArmando LopezNo ratings yet
- patent_Suppressing digital-to-analog converter (DAC) errorDocument9 pagespatent_Suppressing digital-to-analog converter (DAC) errorAnonymous AnonymousNo ratings yet
- A7 PDFDocument11 pagesA7 PDFRouda AldosariNo ratings yet
- 2007 - Us7251567 - Electronically Calibrated Beacon For A Horizontal Directional Drilling MachineDocument14 pages2007 - Us7251567 - Electronically Calibrated Beacon For A Horizontal Directional Drilling MachineCường Nguyễn QuốcNo ratings yet
- Guided Wave Radar Level Transmitter DesignDocument16 pagesGuided Wave Radar Level Transmitter DesignEdda Andrade RosalesNo ratings yet
- Enterprise Elec 1 MW 2017 Test Report OETDocument33 pagesEnterprise Elec 1 MW 2017 Test Report OETJim OConnorNo ratings yet
- United States Patent (10) Patent No.: US 6,238,333 B1: L00S (45) Date of Patent: May 29, 2001Document9 pagesUnited States Patent (10) Patent No.: US 6,238,333 B1: L00S (45) Date of Patent: May 29, 2001danielgoba84No ratings yet
- US9496487Document12 pagesUS9496487George AcostaNo ratings yet
- SDR Vor TXDocument13 pagesSDR Vor TXJohn PurcellNo ratings yet
- US4668941Document7 pagesUS4668941Carlos OrtegaNo ratings yet
- All-Digital Frequency Synthesizer in Deep-Submicron CMOSFrom EverandAll-Digital Frequency Synthesizer in Deep-Submicron CMOSNo ratings yet
- Time Waveform Analysis Choosing Proper SettingsDocument3 pagesTime Waveform Analysis Choosing Proper SettingssebastianNo ratings yet
- Estimation On Reliability Models of Bearing FailurDocument22 pagesEstimation On Reliability Models of Bearing FailursebastianNo ratings yet
- Data Sheet: HCTL-2001-A00, HCTL-2017-A00 / PLC, HCTL-2021-A00 / PLCDocument16 pagesData Sheet: HCTL-2001-A00, HCTL-2017-A00 / PLC, HCTL-2021-A00 / PLCsebastianNo ratings yet
- Exploring The Distribution of Time To Failure of BDocument6 pagesExploring The Distribution of Time To Failure of BsebastianNo ratings yet
- Suprocktech High Speed Strain PDFDocument2 pagesSuprocktech High Speed Strain PDFsebastianNo ratings yet
- SKF BRGDocument22 pagesSKF BRGVijeth99No ratings yet
- Parts List 09 380 04 08: AC Brake Motors DR.100M, L, LC BE2/BE5 HR/HF/FC/C/AL/LN/Z Flange Version, Dimensions in InchDocument3 pagesParts List 09 380 04 08: AC Brake Motors DR.100M, L, LC BE2/BE5 HR/HF/FC/C/AL/LN/Z Flange Version, Dimensions in Inchsebastian50% (2)
- Failure Evaluation of Ball Bearing For Prognostics: SciencedirectDocument8 pagesFailure Evaluation of Ball Bearing For Prognostics: SciencedirectsebastianNo ratings yet
- GGGGGGGGGGGGGGG: FTF Is The Only One Standing OutDocument4 pagesGGGGGGGGGGGGGGG: FTF Is The Only One Standing OutsebastianNo ratings yet
- New Sensor Technology For Measuring Torsional Shaft Vibration in Turbine GeneratorsDocument8 pagesNew Sensor Technology For Measuring Torsional Shaft Vibration in Turbine GeneratorssebastianNo ratings yet
- ASME Paper 2017 PDFDocument7 pagesASME Paper 2017 PDFsebastianNo ratings yet
- 2130 PPT MachineryHealthColDocument8 pages2130 PPT MachineryHealthColsebastianNo ratings yet
- Shaftvoltprobe AppnotesDocument8 pagesShaftvoltprobe AppnotessebastianNo ratings yet
- Gearbox Reliability Collaborative Phase 3 Gearbox 2 Test 1Document46 pagesGearbox Reliability Collaborative Phase 3 Gearbox 2 Test 1sebastianNo ratings yet
- Development of Asynchronous Motor Bearing Fault Diagnosis Method Using TDA and FFNNDocument4 pagesDevelopment of Asynchronous Motor Bearing Fault Diagnosis Method Using TDA and FFNNsebastianNo ratings yet
- TI - PROGNOST-Predictor Slidepool - 01 - ENDocument33 pagesTI - PROGNOST-Predictor Slidepool - 01 - ENsebastian100% (1)
- White Paper Triax Accelerometer For Route Based Vibration Analysis Ams en 39110Document11 pagesWhite Paper Triax Accelerometer For Route Based Vibration Analysis Ams en 39110sebastianNo ratings yet
- Banda Passante MontaggioDocument58 pagesBanda Passante MontaggiosebastianNo ratings yet
- 2130 PPT PeakVueCaseDocument98 pages2130 PPT PeakVueCasesebastian100% (1)
- Enhanced Vibration DetectionDocument19 pagesEnhanced Vibration DetectionsebastianNo ratings yet
- Banda Passante MontaggioDocument58 pagesBanda Passante MontaggiosebastianNo ratings yet
- Why Are Rotors SkewedDocument2 pagesWhy Are Rotors SkewedsebastianNo ratings yet
- Banda Passante MontaggioDocument58 pagesBanda Passante MontaggiosebastianNo ratings yet
- Introduction To PeakvueDocument55 pagesIntroduction To PeakvuesebastianNo ratings yet
- CM Harmoniques V8 PDFDocument10 pagesCM Harmoniques V8 PDFsebastianNo ratings yet
- United States Patent 19 11 Patent Number: 5,726,911: Canada Et Al. 45 Date of Patent: Mar. 10, 1998Document14 pagesUnited States Patent 19 11 Patent Number: 5,726,911: Canada Et Al. 45 Date of Patent: Mar. 10, 1998sebastianNo ratings yet
- 3 6Document22 pages3 6Goutham KSNo ratings yet
- Assignment 1Document2 pagesAssignment 1goyalchirag2222No ratings yet
- EE891 Stochastic Systems: Welcome and IntroductionDocument16 pagesEE891 Stochastic Systems: Welcome and IntroductionMohammad SadiqNo ratings yet
- Ci RT3606 Placa PCDocument72 pagesCi RT3606 Placa PCjackson lopesNo ratings yet
- Adash A4400 VA4 Pro II Data Sheet Vibraciones ProgramaDocument6 pagesAdash A4400 VA4 Pro II Data Sheet Vibraciones ProgramaIgnacio Alfredo Espinoza GonzalezNo ratings yet
- Basics of The 4 - 20ma Current LoopDocument3 pagesBasics of The 4 - 20ma Current LoopNTNo ratings yet
- Evaluation of Shear Wave Velocity Profile Using SPTDocument18 pagesEvaluation of Shear Wave Velocity Profile Using SPTJerry BeardNo ratings yet
- Vlsidsp Chap6Document35 pagesVlsidsp Chap6Anupam DubeyNo ratings yet
- SMT8V4 Technical ManualDocument40 pagesSMT8V4 Technical ManualderekrichnerNo ratings yet
- FF Requirements For Fieldbus DevicesDocument12 pagesFF Requirements For Fieldbus Deviceshamz786No ratings yet
- UNIT 4 MechatronicsDocument21 pagesUNIT 4 MechatronicsMuthuvel M100% (1)
- White LED Drivers With External FETDocument3 pagesWhite LED Drivers With External FETnistoreduardcristianNo ratings yet
- Issue 274 May 2013Document84 pagesIssue 274 May 2013plvg2009No ratings yet
- Signal Engineering Manual Part 1Document171 pagesSignal Engineering Manual Part 1pradeeepgarg67% (3)
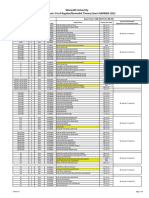
- Marwadi University B.Tech. - Sem 3 To 8 Regular/Remedial Theory Exam SUMMER-2021Document5 pagesMarwadi University B.Tech. - Sem 3 To 8 Regular/Remedial Theory Exam SUMMER-2021mohamad mahmoudNo ratings yet
- Electronic Service Manual: Compressor ModelsDocument116 pagesElectronic Service Manual: Compressor ModelsAtaa AssaadNo ratings yet
- CSE Course From 2012 PDFDocument51 pagesCSE Course From 2012 PDFAPOORV SINGHNo ratings yet
- SDL Data Engineer Manual - InSiteDocument126 pagesSDL Data Engineer Manual - InSiteronelbarafaeldiego0% (1)
- VTU Exam ScheduleDocument46 pagesVTU Exam ScheduleKrisNo ratings yet
- Computer Engineering CurriculumDocument23 pagesComputer Engineering CurriculumPawan PaudelNo ratings yet
- Fuchs1991 - Ten Years of Experience With Leak Detection by Acoustic Signal AnalysisDocument19 pagesFuchs1991 - Ten Years of Experience With Leak Detection by Acoustic Signal AnalysisHenriqueNo ratings yet
- Lecture 2: Modern Communications Systems: John M PaulyDocument19 pagesLecture 2: Modern Communications Systems: John M PaulyDhiraj PrakashNo ratings yet
- S-1566 PowerCommand 1.1Document6 pagesS-1566 PowerCommand 1.1mnezami100% (2)
- EE 321: Communication Systems I: L1 - IntroductionDocument28 pagesEE 321: Communication Systems I: L1 - IntroductionFengxing ZhuNo ratings yet
- Cylinder Combustion SensorDocument4 pagesCylinder Combustion SensorgosoriobNo ratings yet
- 2 Chapter MM Information RepresentationDocument111 pages2 Chapter MM Information RepresentationShreepad Bhat PNo ratings yet
- 1756 IF8H User ManualDocument216 pages1756 IF8H User Manualjrivas31119No ratings yet