You might also like
- Nonlinear Functional Analysis and Applications: Proceedings of an Advanced Seminar Conducted by the Mathematics Research Center, the University of Wisconsin, Madison, October 12-14, 1970From EverandNonlinear Functional Analysis and Applications: Proceedings of an Advanced Seminar Conducted by the Mathematics Research Center, the University of Wisconsin, Madison, October 12-14, 1970Louis B. RallNo ratings yet
- Instructions: R A R A A RDocument3 pagesInstructions: R A R A A RanhhaikimdongNo ratings yet
- 2-EE009-3-2-EMTH3-VC1 Tutorial ProblemsDocument4 pages2-EE009-3-2-EMTH3-VC1 Tutorial ProblemsBrian WaithakaNo ratings yet
- Homework 5Document2 pagesHomework 5Arthur DingNo ratings yet
- EML 4507 Spring 2017 HW11 SolutionDocument7 pagesEML 4507 Spring 2017 HW11 SolutionUnmil PatelNo ratings yet
- Exercises Vector AnalysisDocument3 pagesExercises Vector AnalysisTafseer AhmedNo ratings yet
- L /L /L /L: 3. 3A. Double Integrals in Rectangular CoordinatesDocument4 pagesL /L /L /L: 3. 3A. Double Integrals in Rectangular CoordinatesShaip DautiNo ratings yet
- Microsoft Word - MA3004 - Tutorial 6 (FEM) Questions - AY2022-23Document3 pagesMicrosoft Word - MA3004 - Tutorial 6 (FEM) Questions - AY2022-23Luna OpalNo ratings yet
- Exam RT2 2018 WinterDocument16 pagesExam RT2 2018 WinterLuis CarvalhoNo ratings yet
- Practice Set#3Document3 pagesPractice Set#3shreya sriNo ratings yet
- Exercises On Double IntegralsDocument5 pagesExercises On Double IntegralsdyahshalindriNo ratings yet
- Deriving Strain-Displacement Relations for 3-Noded Triangular and Bar ElementsDocument4 pagesDeriving Strain-Displacement Relations for 3-Noded Triangular and Bar ElementsASHIK KSNo ratings yet
- CIE 1 Portions FEM - HKRV - BMSCE 21022020 PDFDocument70 pagesCIE 1 Portions FEM - HKRV - BMSCE 21022020 PDFYakajNo ratings yet
- Vibration of A Free Free Beam Under TensDocument10 pagesVibration of A Free Free Beam Under Tensjean.vasco94No ratings yet
- MIT Computational Geometry Problem Set 2 on Spline CurvesDocument3 pagesMIT Computational Geometry Problem Set 2 on Spline Curvesbaoke renNo ratings yet
- Assignemt 3Document2 pagesAssignemt 3Ashish RanjanNo ratings yet
- Nonlinear Inelastic Analysis of Steel-Concrete Composite Beam-Columns Using The Stability FunctionsDocument23 pagesNonlinear Inelastic Analysis of Steel-Concrete Composite Beam-Columns Using The Stability FunctionsIgnacio TabuadaNo ratings yet
- Bending Of Beam Lab Report AnalysisDocument10 pagesBending Of Beam Lab Report AnalysisEdoardo PeciNo ratings yet
- Double Integrals 1Document22 pagesDouble Integrals 1Aztec MayanNo ratings yet
- Straight Lines & Circles AssignmentDocument14 pagesStraight Lines & Circles AssignmentKaushikNo ratings yet
- Hw5-Vision14 Solution4Document2 pagesHw5-Vision14 Solution4Mohiuddin AhmadNo ratings yet
- Experiment 8: Deflection of beams (Macaulay’s MethodDocument7 pagesExperiment 8: Deflection of beams (Macaulay’s Methodmalicat alwroodNo ratings yet
- FEM 16 MARKS QUESTIONSDocument13 pagesFEM 16 MARKS QUESTIONSmanisekNo ratings yet
- Pertemuan 2Document17 pagesPertemuan 2Syarifah Humaira Al'mudhirNo ratings yet
- MANE 4240 & CIVL 4240 Introduction to Finite ElementsDocument33 pagesMANE 4240 & CIVL 4240 Introduction to Finite ElementsM.Saravana Kumar..M.ENo ratings yet
- MANE 4240 & CIVL 4240 Introduction To Finite Elements: Constant Strain Triangle (CST)Document33 pagesMANE 4240 & CIVL 4240 Introduction To Finite Elements: Constant Strain Triangle (CST)Jason MillerNo ratings yet
- Review 1Document13 pagesReview 1QwilleranNo ratings yet
- ASM AssignmentsDocument10 pagesASM AssignmentsGulshan DewanganNo ratings yet
- Continuum Hw3 (2017)Document2 pagesContinuum Hw3 (2017)luatnvNo ratings yet
- Battiato Gastaldi FEM ReportDocument39 pagesBattiato Gastaldi FEM ReportChiara GastaldiNo ratings yet
- HW 4 SolutionDocument4 pagesHW 4 Solution万宇恒No ratings yet
- MEMB343 Final Exams 2019-2020-1 PDFDocument8 pagesMEMB343 Final Exams 2019-2020-1 PDFRubanraj RajendrenNo ratings yet
- Example 2.1: A Truss Structure Made of Steel (Modulus of Elasticity, E 200gpa and CrossDocument6 pagesExample 2.1: A Truss Structure Made of Steel (Modulus of Elasticity, E 200gpa and CrossVinaasha BalakrishnanNo ratings yet
- 02 - 5.3 NotesDocument6 pages02 - 5.3 NotesPraharshita MudunuriNo ratings yet
- IIT Kanpur Ph.D Selection Test QuestionsDocument3 pagesIIT Kanpur Ph.D Selection Test QuestionsSamadhan KambleNo ratings yet
- AP Calc Unit 7Document23 pagesAP Calc Unit 7Nolan GecanNo ratings yet
- Final ExamDocument5 pagesFinal Examdothaibinhca2004No ratings yet
- MidexamsDocument1 pageMidexamsz3ft8k8rNo ratings yet
- Problems of Variations and Boundary Value ProblemsDocument8 pagesProblems of Variations and Boundary Value Problemsalvin tehraniNo ratings yet
- Math201 HW4Document4 pagesMath201 HW4javohirnematjonov932No ratings yet
- General Problem SheetDocument10 pagesGeneral Problem SheetshivaNo ratings yet
- AP Calc BC Sem 1 Final ReviewDocument12 pagesAP Calc BC Sem 1 Final ReviewParth PatelNo ratings yet
- AP Calc BC Sem 1 Final ReviewDocument12 pagesAP Calc BC Sem 1 Final ReviewJess PeraltaNo ratings yet
- Slope and Deflection Method For Continuous BeamsDocument18 pagesSlope and Deflection Method For Continuous BeamsLe Xuan HungNo ratings yet
- Capitulo3 Gillat PDFDocument8 pagesCapitulo3 Gillat PDFluis fernando riojas pecheNo ratings yet
- Reading Assignment: Logan 6.2-6.5 + Lecture Notes SummaryDocument32 pagesReading Assignment: Logan 6.2-6.5 + Lecture Notes Summarym_er100No ratings yet
- Exam RT2 2016 WinterDocument11 pagesExam RT2 2016 WinterLuis CarvalhoNo ratings yet
- CI 3 PositionDocument25 pagesCI 3 PositionSayphone HoungbounyuangNo ratings yet
- AMA2112 Assignment 1 2020Document2 pagesAMA2112 Assignment 1 2020Ma Chung WaiNo ratings yet
- MPZ4230-Assignment 01-04Document10 pagesMPZ4230-Assignment 01-04surangabongaNo ratings yet
- USN 1 S I - Concise for Engineering Mathematics Exam PaperDocument2 pagesUSN 1 S I - Concise for Engineering Mathematics Exam PaperMamatha RyavaladNo ratings yet
- Electromagnetic Theory 1 2019 PDFDocument34 pagesElectromagnetic Theory 1 2019 PDFchulaNo ratings yet
- Spline Method of InterpolationDocument7 pagesSpline Method of InterpolationNadineNo ratings yet
- VectorCalculus Test 2020 10 02Document1 pageVectorCalculus Test 2020 10 02Giannis MamalakisNo ratings yet
- Applied Mathematics I (Math 1041) Worksheet IDocument2 pagesApplied Mathematics I (Math 1041) Worksheet IEphrata M MulualemNo ratings yet
- ED5015 Computational Methods Assignment 2 SolutionsDocument5 pagesED5015 Computational Methods Assignment 2 SolutionsNaman JainNo ratings yet
- ES386_2017Document7 pagesES386_2017Luke HoganNo ratings yet
- MAT 350 AssignmentDocument2 pagesMAT 350 AssignmentMahzebin PushpoNo ratings yet
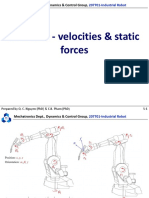
- Industrial Robot - Nguyen, Quoc Chi - C4Document67 pagesIndustrial Robot - Nguyen, Quoc Chi - C4anhhaikimdongNo ratings yet
- Industrial Robot - Nguyen, Quoc Chi - C4Document67 pagesIndustrial Robot - Nguyen, Quoc Chi - C4anhhaikimdongNo ratings yet
- Industrial Robot - Nguyen, Quoc Chi - C5Document53 pagesIndustrial Robot - Nguyen, Quoc Chi - C5anhhaikimdongNo ratings yet
- (Downloadsachmienphi - Com) Sach Giao Khoa Giao Duc Quoc Phong - An Ninh 11Document117 pages(Downloadsachmienphi - Com) Sach Giao Khoa Giao Duc Quoc Phong - An Ninh 11anhhaikimdongNo ratings yet
- Mechatronics System Design Mobile Robot Instructor: Prof. Nguyễn Tấn TiếnDocument46 pagesMechatronics System Design Mobile Robot Instructor: Prof. Nguyễn Tấn TiếnanhhaikimdongNo ratings yet
- KQMT2001 192 inDocument22 pagesKQMT2001 192 inanhhaikimdongNo ratings yet
- P Is Rotated About: Homework #1Document2 pagesP Is Rotated About: Homework #1anhhaikimdongNo ratings yet
- Chapter 9: PLC Programming Language - STL/SFC InstructionsDocument47 pagesChapter 9: PLC Programming Language - STL/SFC InstructionsanhhaikimdongNo ratings yet
- Making A Difference: - GoalsDocument80 pagesMaking A Difference: - GoalsanhhaikimdongNo ratings yet
- Platelets & Blood Clotting: The Hemostasis ProcessDocument34 pagesPlatelets & Blood Clotting: The Hemostasis ProcesssamayaNo ratings yet
- Friends of Hursley School: Late Summer NewsletterDocument6 pagesFriends of Hursley School: Late Summer Newsletterapi-25947758No ratings yet
- Hyundai-25 30 33L 35LN-9A19.01Rev.6 Eng-D4 PDFDocument20 pagesHyundai-25 30 33L 35LN-9A19.01Rev.6 Eng-D4 PDFVicente Antonio GonzalezNo ratings yet
- 4.2 - Traditional Double-Walled HapaDocument25 pages4.2 - Traditional Double-Walled HapaThakur VeeruNo ratings yet
- Rental Range Powered by YANMAR Diesel GeneratorDocument6 pagesRental Range Powered by YANMAR Diesel GeneratorJonathan CastilloNo ratings yet
- Golden Dawn 2 9 The Moon BreathDocument4 pagesGolden Dawn 2 9 The Moon BreathF_RCNo ratings yet
- Capacitores Electroliticos SMDDocument8 pagesCapacitores Electroliticos SMDalvaro marrugoNo ratings yet
- Part 1Document52 pagesPart 1Jeffry Daud BarrungNo ratings yet
- Subjects Verbs PrepositionsDocument11 pagesSubjects Verbs Prepositionsგუგა ნოსელიძეNo ratings yet
- Oxygen Concentrator SpecificationsDocument3 pagesOxygen Concentrator Specificationsmino pharmNo ratings yet
- Calculation of Carbon Footprint: HouseDocument3 pagesCalculation of Carbon Footprint: HouseUmut ÇağırganNo ratings yet
- C32 MOTOR CAT Electronic Unit Injector - TestDocument2 pagesC32 MOTOR CAT Electronic Unit Injector - TestFreddy Villegas100% (1)
- 2 1 Flash Klasa 6 Mod 1b Test ExtendedDocument4 pages2 1 Flash Klasa 6 Mod 1b Test ExtendedMonika Ciepłuch-Jarema100% (1)
- Shadows On The Moon by Zoe Marriott ExtractDocument20 pagesShadows On The Moon by Zoe Marriott ExtractWalker Books100% (1)
- Growth, Stagnation or Decline? Agfficulturalproductm'Iy in British IndiaDocument290 pagesGrowth, Stagnation or Decline? Agfficulturalproductm'Iy in British IndiaHarshadeep BiswasNo ratings yet
- Slovakia C1 TestDocument7 pagesSlovakia C1 TestĐăng LêNo ratings yet
- Digital control engineering lecture on z-transform and samplingDocument13 pagesDigital control engineering lecture on z-transform and samplingjin kazamaNo ratings yet
- MUSCULAR SYSTEM WORKSHEET Slides 1 To 4Document4 pagesMUSCULAR SYSTEM WORKSHEET Slides 1 To 4kwaiyuen ohnNo ratings yet
- The Practical Welding EngineerDocument154 pagesThe Practical Welding EngineerMohamed Atef0% (1)
- PTC Document Status: (Updated 11 November 2015)Document5 pagesPTC Document Status: (Updated 11 November 2015)AndersonGabriel23No ratings yet
- What Is The Kingdom of GodDocument10 pagesWhat Is The Kingdom of GodSunil ChelladuraiNo ratings yet
- Bronchiolitis A Practical Approach For The General RadiologistDocument42 pagesBronchiolitis A Practical Approach For The General RadiologistTara NareswariNo ratings yet
- Common Carrier RulingDocument4 pagesCommon Carrier RulingChic PabalanNo ratings yet
- Algebra 1 FINAL EXAM REVIEW 2Document2 pagesAlgebra 1 FINAL EXAM REVIEW 2Makala DarwoodNo ratings yet
- Quarter 1-Module 2 Modern ArtDocument20 pagesQuarter 1-Module 2 Modern ArtKimberly Trocio Kim100% (1)
- Labcelldivision ErikagutierrezDocument10 pagesLabcelldivision Erikagutierrezapi-336047220No ratings yet
- CHAPT 12a PDFDocument2 pagesCHAPT 12a PDFindocode100% (1)
- Exercitii AdjectivDocument3 pagesExercitii AdjectivFirma GSCNo ratings yet
- Altivar ATV61HU55N4 CatalogueDocument4 pagesAltivar ATV61HU55N4 CatalogueEugen Marius BadescuNo ratings yet
- Determine PH by PH Indicator and Universal IndicatorDocument3 pagesDetermine PH by PH Indicator and Universal IndicatorhaleelNo ratings yet