You might also like
- DF Af A F Afa Af A FD A Fa D Daf Test EteDocument7 pagesDF Af A F Afa Af A FD A Fa D Daf Test EteMilos RisticNo ratings yet
- English Words For TOEFLDocument60 pagesEnglish Words For TOEFLMilos RisticNo ratings yet
- English Good Words For LearingDocument44 pagesEnglish Good Words For LearingMilos RisticNo ratings yet
- Listening Task 1: XI Всероссийская олимпиада школьников по английскому языку 2010 г. III (региональный) этапDocument27 pagesListening Task 1: XI Всероссийская олимпиада школьников по английскому языку 2010 г. III (региональный) этапMilos RisticNo ratings yet
- Listening Task 1: XI Всероссийская олимпиада школьников по английскому языку 2010 г. III (региональный) этапDocument27 pagesListening Task 1: XI Всероссийская олимпиада школьников по английскому языку 2010 г. III (региональный) этапMilos RisticNo ratings yet
- New Tesdfaz/sdfxt DocumentDocument15 pagesNew Tesdfaz/sdfxt DocumentMilos RisticNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Abb Fox Synchronisation r8 RC 1khw002008Document132 pagesAbb Fox Synchronisation r8 RC 1khw002008Mustafa HasanNo ratings yet
- LEC 06 - 07 Mechatronics Systems and ApplicationsDocument26 pagesLEC 06 - 07 Mechatronics Systems and ApplicationsAakash ParmarNo ratings yet
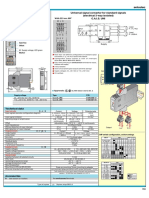
- Entrelec Signal ConverterDocument2 pagesEntrelec Signal ConverterVikaas JainNo ratings yet
- DSD NotesDocument5 pagesDSD NoteshkrohillaNo ratings yet
- Questions Analog & Signal InternDocument3 pagesQuestions Analog & Signal InternArun JagaNo ratings yet
- Computer QuestDocument3 pagesComputer QuestXavier MundattilNo ratings yet
- Diagnostic Trouble Codes (Document11 pagesDiagnostic Trouble Codes (Samuel LamedaNo ratings yet
- cs1&2 Answer KeyDocument18 pagescs1&2 Answer KeyAnitha BhavaniNo ratings yet
- EMC110006E 5 EGSV3 CACR-xx-EExVxx-00 UsersManual PDFDocument64 pagesEMC110006E 5 EGSV3 CACR-xx-EExVxx-00 UsersManual PDFLautaro AyoroaNo ratings yet
- Control Valve Interview QuestionDocument17 pagesControl Valve Interview QuestionQamar Hassan IqbalNo ratings yet
- Astrol AA 10276 001 PDFDocument9 pagesAstrol AA 10276 001 PDFreza yousefiNo ratings yet
- 5.1. Unit V - DSP ProcessorDocument83 pages5.1. Unit V - DSP ProcessorJayaram ThamizhmaniNo ratings yet
- 1 Statistics DataDocument295 pages1 Statistics Dataaslam844No ratings yet
- Itm University Gwalior, (M.P) : Q 1. Define PSK?Document3 pagesItm University Gwalior, (M.P) : Q 1. Define PSK?S M Nafiul HossainNo ratings yet
- Synchronization PanelDocument31 pagesSynchronization PanelHariom ChaurasiyaNo ratings yet
- Experiment No. 3 Image Sampling and QuantizationDocument3 pagesExperiment No. 3 Image Sampling and QuantizationShahidan KirkukyNo ratings yet
- Sel 267 Powerfactory V001 Relay Model Description: Digsilent Technical DocumentationDocument9 pagesSel 267 Powerfactory V001 Relay Model Description: Digsilent Technical DocumentationBra BicabaNo ratings yet
- 1218 Instrument Testing & Calibration Procedure NTGFDPDocument50 pages1218 Instrument Testing & Calibration Procedure NTGFDPTaha Hasan100% (1)
- ECE438 - Laboratory 4a: Sampling and Reconstruction of Continuous-Time SignalsDocument8 pagesECE438 - Laboratory 4a: Sampling and Reconstruction of Continuous-Time Signalsjomer_juan14No ratings yet
- 1 - An Efficient Kalman Noise Canceller For Cardiac Signal AnalysisDocument17 pages1 - An Efficient Kalman Noise Canceller For Cardiac Signal Analysisnajula m nNo ratings yet
- Unit 1Document6 pagesUnit 1Dr. Shaik Vaseem AkramNo ratings yet
- Dokumen - Tips - Cmos Telecom Data Converters PDFDocument610 pagesDokumen - Tips - Cmos Telecom Data Converters PDFaurybNo ratings yet
- SimulinkDocument18 pagesSimulinkhatic33126No ratings yet
- Simulating First Order Dynamical Systems Using Analog ComputerDocument12 pagesSimulating First Order Dynamical Systems Using Analog ComputerRadwan TareefNo ratings yet
- Sensors 966Document6 pagesSensors 966Ahmed RezkNo ratings yet
- 3332 E Automation Technology With Siemens PLCDocument89 pages3332 E Automation Technology With Siemens PLCShamendu Roy RohitNo ratings yet
- 7VE6xxx Manual A1 040005 enDocument304 pages7VE6xxx Manual A1 040005 enFredrikNo ratings yet
- Kuhse: Operating Instructions Control Unit For Gen. Power SetsDocument25 pagesKuhse: Operating Instructions Control Unit For Gen. Power SetsrafatNo ratings yet
- Datasheet: Broadband AmplifierDocument12 pagesDatasheet: Broadband AmplifiercarlosNo ratings yet
- Chapter1s (2) - DéverrouilléDocument57 pagesChapter1s (2) - DéverrouilléVincent GHEROLDNo ratings yet