You might also like
- DATA MINING and MACHINE LEARNING. PREDICTIVE TECHNIQUES: ENSEMBLE METHODS, BOOSTING, BAGGING, RANDOM FOREST, DECISION TREES and REGRESSION TREES.: Examples with MATLABFrom EverandDATA MINING and MACHINE LEARNING. PREDICTIVE TECHNIQUES: ENSEMBLE METHODS, BOOSTING, BAGGING, RANDOM FOREST, DECISION TREES and REGRESSION TREES.: Examples with MATLABNo ratings yet
- DATA MINING and MACHINE LEARNING. CLASSIFICATION PREDICTIVE TECHNIQUES: SUPPORT VECTOR MACHINE, LOGISTIC REGRESSION, DISCRIMINANT ANALYSIS and DECISION TREES: Examples with MATLABFrom EverandDATA MINING and MACHINE LEARNING. CLASSIFICATION PREDICTIVE TECHNIQUES: SUPPORT VECTOR MACHINE, LOGISTIC REGRESSION, DISCRIMINANT ANALYSIS and DECISION TREES: Examples with MATLABNo ratings yet
- A Review of Supervised Learning Based Classification For Text To Speech SystemDocument8 pagesA Review of Supervised Learning Based Classification For Text To Speech SystemInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Decision TreesDocument5 pagesDecision TreesUchennaNo ratings yet
- PR Assignment 02 - Seemal Ajaz (206979)Document5 pagesPR Assignment 02 - Seemal Ajaz (206979)Azka NawazNo ratings yet
- Kernels, Model Selection and Feature SelectionDocument5 pagesKernels, Model Selection and Feature SelectionGautam VashishtNo ratings yet
- Survey On Feature Selection in High-Dimensional Data Via Constraint, Relevance and RedundancyDocument4 pagesSurvey On Feature Selection in High-Dimensional Data Via Constraint, Relevance and RedundancyInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Feature SelectionDocument18 pagesFeature Selectiongabby209No ratings yet
- Data Science NotesDocument36 pagesData Science Notesmdluffyyy300No ratings yet
- A Survey On Feature SelectionDocument8 pagesA Survey On Feature Selectionkiran munagalaNo ratings yet
- Classification and PredictionDocument41 pagesClassification and Predictionkolluriniteesh111No ratings yet
- Prediction Analysis Techniques of Data Mining: A ReviewDocument7 pagesPrediction Analysis Techniques of Data Mining: A ReviewEdwardNo ratings yet
- PPAI PaperDocument9 pagesPPAI PaperMOHAMMED HANZLA HUSSAINNo ratings yet
- Improved Discretization Based Decision Tree For Continuous AttributesDocument5 pagesImproved Discretization Based Decision Tree For Continuous AttributesseventhsensegroupNo ratings yet
- C45 AlgorithmDocument12 pagesC45 AlgorithmtriisantNo ratings yet
- Clustering Before ClassificationDocument3 pagesClustering Before Classificationmc awartyNo ratings yet
- Literature Review On Feature Subset Selection TechniquesDocument3 pagesLiterature Review On Feature Subset Selection TechniquesInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- DMWH M3Document21 pagesDMWH M3BINESHNo ratings yet
- Feature Subset Selection With Fast Algorithm ImplementationDocument5 pagesFeature Subset Selection With Fast Algorithm ImplementationseventhsensegroupNo ratings yet
- Assignment #1 Intro to Pattern RecognitionDocument8 pagesAssignment #1 Intro to Pattern RecognitionEngr. Sohaib JamalNo ratings yet
- 1-2 The Problem 3-4 Proposed Solution 5-7 The Experiment 8-9 Experimental Results 10-11 Conclusion 12 References 13Document14 pages1-2 The Problem 3-4 Proposed Solution 5-7 The Experiment 8-9 Experimental Results 10-11 Conclusion 12 References 13NikhilLinSaldanhaNo ratings yet
- Feature SelectionDocument18 pagesFeature SelectionJavada JavadaNo ratings yet
- Pattern Recognition Seminar PresentationDocument12 pagesPattern Recognition Seminar PresentationSamuel UdoemaNo ratings yet
- MACHINE LEARNING 1-5 (Ai &DS)Document60 pagesMACHINE LEARNING 1-5 (Ai &DS)Amani yar Khan100% (1)
- Big Data-Classification SurveyDocument11 pagesBig Data-Classification Surveyஷோபனா கோபாலகிருஷ்ணன்No ratings yet
- Machine Learning ToolboxDocument10 pagesMachine Learning ToolboxmlaijNo ratings yet
- Hybrid feature selection improves classifier performanceDocument8 pagesHybrid feature selection improves classifier performanceWibu AsalNo ratings yet
- Strategies and Algorithms For Clustering Large Datasets: A ReviewDocument20 pagesStrategies and Algorithms For Clustering Large Datasets: A ReviewAnkur KumarNo ratings yet
- Asynchronous Claisfication Basic ConcepsDocument2 pagesAsynchronous Claisfication Basic ConcepsLinda AmunyelaNo ratings yet
- Graph Autoencoder-Based Unsupervised Feature Selection With Broad and Local Data Structure PreservationDocument28 pagesGraph Autoencoder-Based Unsupervised Feature Selection With Broad and Local Data Structure PreservationriadelectroNo ratings yet
- Addressing Optimisation Challenges For Datasets With Many Variables, Using Genetic Algorithms To Implement Feature SelectionDocument21 pagesAddressing Optimisation Challenges For Datasets With Many Variables, Using Genetic Algorithms To Implement Feature SelectionRaghvendraNo ratings yet
- A Novel Feature Selection Method For Data Mining TDocument17 pagesA Novel Feature Selection Method For Data Mining TRishi AstasachindraNo ratings yet
- International Journal of Engineering Research and Development (IJERD)Document5 pagesInternational Journal of Engineering Research and Development (IJERD)IJERDNo ratings yet
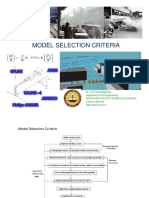
- Model Selection Criteria: T C K T) C U (X T C T C K T) C U (X T CDocument17 pagesModel Selection Criteria: T C K T) C U (X T C T C K T) C U (X T CArjun KumarNo ratings yet
- Unit 3Document41 pagesUnit 3Venkatesh SharmaNo ratings yet
- Pattern Recognition Techniques in AIDocument6 pagesPattern Recognition Techniques in AIksumitkapoorNo ratings yet
- PATTERN RECOGNITION Final NotesDocument40 pagesPATTERN RECOGNITION Final Notesssa83% (6)
- An Overview of Pattern RecognitionDocument7 pagesAn Overview of Pattern RecognitionElie SalibaNo ratings yet
- IOSR JournalsDocument7 pagesIOSR JournalsInternational Organization of Scientific Research (IOSR)No ratings yet
- Literature Review CCSIT205Document9 pagesLiterature Review CCSIT205Indri LisztoNo ratings yet
- Classification Through Machine Learning Technique: C4.5 Algorithm Based On Various EntropiesDocument8 pagesClassification Through Machine Learning Technique: C4.5 Algorithm Based On Various EntropiesMohamed Hechmi JERIDINo ratings yet
- For More Visit WWW - Ktunotes.inDocument21 pagesFor More Visit WWW - Ktunotes.inArcha RajanNo ratings yet
- Applied Sciences: Outlier Detection Based Feature Selection Exploiting Bio-Inspired Optimization AlgorithmsDocument28 pagesApplied Sciences: Outlier Detection Based Feature Selection Exploiting Bio-Inspired Optimization AlgorithmsAyman TaniraNo ratings yet
- Koushal Vichare AssingmentDocument5 pagesKoushal Vichare Assingmentpraful.gangurde23-25No ratings yet
- Image Classification Techniques-A SurveyDocument4 pagesImage Classification Techniques-A SurveyInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- A_review_of_feature_selection_methods_with_applicationsDocument6 pagesA_review_of_feature_selection_methods_with_applicationsLorraine OliveiraNo ratings yet
- June 77Document20 pagesJune 77Vinayaga MoorthyNo ratings yet
- Recent Advances in Clustering A Brief SurveyDocument9 pagesRecent Advances in Clustering A Brief SurveyAnwar ShahNo ratings yet
- Gautam A. KudaleDocument6 pagesGautam A. KudaleHellbuster45No ratings yet
- Pattern: RecognitionDocument25 pagesPattern: RecognitionArunima DoluiNo ratings yet
- Assessing SHAP values as an explainable feature selection mechanismDocument8 pagesAssessing SHAP values as an explainable feature selection mechanismasdsafdsNo ratings yet
- Pattern recognition techniques reviewDocument6 pagesPattern recognition techniques reviewLuis GongoraNo ratings yet
- Feature Extraction and Machine Learning for Image ClassificationDocument6 pagesFeature Extraction and Machine Learning for Image Classificationshubhasish70No ratings yet
- Unit 5 - Machine Learning - WWW - Rgpvnotes.in PDFDocument14 pagesUnit 5 - Machine Learning - WWW - Rgpvnotes.in PDFPratik GuptaNo ratings yet
- Abstract: Instance-Aware Semantic Segmentation For Autonomous VehiclesDocument7 pagesAbstract: Instance-Aware Semantic Segmentation For Autonomous Vehiclesnishant ranaNo ratings yet
- Comparative Study Classification Algorit PDFDocument8 pagesComparative Study Classification Algorit PDFGustavo Adolfo GonzalezNo ratings yet
- Local Feature Selection For Data ClassificationDocument11 pagesLocal Feature Selection For Data ClassificationJoão JúniorNo ratings yet
- Ensemble Based Learning With Stacking, Boosting and Bagging For Unimodal Biometric Identification SystemDocument6 pagesEnsemble Based Learning With Stacking, Boosting and Bagging For Unimodal Biometric Identification SystemsuppiNo ratings yet
- 3038-Article Text-5729-1-10-20210418Document6 pages3038-Article Text-5729-1-10-20210418II9I4005I Uni Andriani Sitohang (119140051 Uni A Sitohang)No ratings yet
- Basic Pattern Recognition ConceptDocument5 pagesBasic Pattern Recognition ConceptSekharNaikNo ratings yet
- 01 Assignment PR NUST PNEC PDFDocument1 page01 Assignment PR NUST PNEC PDFAzka NawazNo ratings yet
- Pattern Recognition SPRING 2020 Nust - Pnec: Assignment 03 DUE 04 AUGUST 2020 - 5PMDocument2 pagesPattern Recognition SPRING 2020 Nust - Pnec: Assignment 03 DUE 04 AUGUST 2020 - 5PMAzka NawazNo ratings yet
- "PR Assignment 01 - Name and Roll Number" in Subject Line.: Pattern Recognition Spring 2020 NUST-PNEC Assignment 01Document1 page"PR Assignment 01 - Name and Roll Number" in Subject Line.: Pattern Recognition Spring 2020 NUST-PNEC Assignment 01Azka NawazNo ratings yet
- Tayyeba Rafaqat (Ms-15799) : Assignment 02Document3 pagesTayyeba Rafaqat (Ms-15799) : Assignment 02Azka NawazNo ratings yet
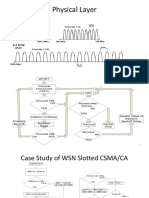
- Physical LayerDocument19 pagesPhysical LayerAzka NawazNo ratings yet
- Solution Map For Mining ppt3952 PDFDocument29 pagesSolution Map For Mining ppt3952 PDFHans AcainNo ratings yet
- Attendance: Umut KurtoğluDocument2 pagesAttendance: Umut KurtoğluHavvaNo ratings yet
- Pe 3 (Module 1) PDFDocument6 pagesPe 3 (Module 1) PDFJoshua Picart100% (1)
- Program Pakan Budidaya Lele: Farm Pond Code AREA (m2) Stocking Date Stocking Amount DensityDocument6 pagesProgram Pakan Budidaya Lele: Farm Pond Code AREA (m2) Stocking Date Stocking Amount DensityChevienrenaldy SamsuNo ratings yet
- KORT RENZO C. BESARIO BS NURSING LESSON REVIEWDocument3 pagesKORT RENZO C. BESARIO BS NURSING LESSON REVIEWDummy AccountNo ratings yet
- Human Resource Reforms in Public Administration: The Importance of The Reward SystemDocument10 pagesHuman Resource Reforms in Public Administration: The Importance of The Reward SystemElena BejanNo ratings yet
- 40 Inventive Principles Applied to Service OperationsDocument16 pages40 Inventive Principles Applied to Service Operationssina yadegariNo ratings yet
- Multiple PDP Contexts User Guide Rev1Document16 pagesMultiple PDP Contexts User Guide Rev1ajit_balyan2003No ratings yet
- Wilkinson 2001Document44 pagesWilkinson 2001Toño Gaspar MuñozNo ratings yet
- Samantha Serpas ResumeDocument1 pageSamantha Serpas Resumeapi-247085580No ratings yet
- Typical Specification of Volvo Truck PDFDocument3 pagesTypical Specification of Volvo Truck PDFKartik BehereNo ratings yet
- Knowledge, Attitudes and Practices of Nursing Students on Dengue FeverDocument9 pagesKnowledge, Attitudes and Practices of Nursing Students on Dengue FeverElinNo ratings yet
- Implementing Cisco Application Centric Infrastructure: (Dcaci)Document2 pagesImplementing Cisco Application Centric Infrastructure: (Dcaci)radsssssNo ratings yet
- DH - Shafira Herowati F - 1102017213Document38 pagesDH - Shafira Herowati F - 1102017213Shafira HfNo ratings yet
- Kma 252 Exam 18 NewstyleDocument19 pagesKma 252 Exam 18 NewstyleSebin GeorgeNo ratings yet
- Op Art PresentationDocument17 pagesOp Art PresentationSilvija PećanacNo ratings yet
- Parenteral Fluid Therapy: Types of Intravenous SolutionDocument18 pagesParenteral Fluid Therapy: Types of Intravenous SolutionKathleen Joy Costales Magtanong100% (1)
- ECF/SSF : 08 : 11: Rotex Double Rack and Pinion Actuator SeriesDocument20 pagesECF/SSF : 08 : 11: Rotex Double Rack and Pinion Actuator SeriesProcess Controls & ServicesNo ratings yet
- Slings CatalogDocument152 pagesSlings CatalogtaNNertaroNo ratings yet
- Macalloy Corporate Brochure September 2018 LR PDFDocument12 pagesMacalloy Corporate Brochure September 2018 LR PDFsampathkumarNo ratings yet
- Slogan Goes Here: Local Store Importing CompanyDocument1 pageSlogan Goes Here: Local Store Importing Company5gt6kdfdqhNo ratings yet
- ACHD 07 The Innsmouth ConspiracyDocument6 pagesACHD 07 The Innsmouth ConspiracyJNo ratings yet
- Section 5: Finite Volume Methods For The Navier Stokes EquationsDocument27 pagesSection 5: Finite Volume Methods For The Navier Stokes EquationsUmutcanNo ratings yet
- Train LapbookDocument34 pagesTrain LapbookSebõk KatalinNo ratings yet
- PAPD Cable glands for hazardous areasDocument2 pagesPAPD Cable glands for hazardous areasGulf Trans PowerNo ratings yet
- Criminal VIIIDocument31 pagesCriminal VIIIAnantHimanshuEkkaNo ratings yet
- Mechanics of Solids by Sadhu Singhpdf Ebook and Ma PDFDocument1 pageMechanics of Solids by Sadhu Singhpdf Ebook and Ma PDFNeeraj Janghu0% (2)
- ATPL theory summary formulas and guidelines (40 charactersDocument60 pagesATPL theory summary formulas and guidelines (40 charactersJonas Norvidas50% (2)
- Chapter 12 1Document15 pagesChapter 12 1Brigitte ReyesNo ratings yet
- Boundary WorkDocument36 pagesBoundary WorkSebastiaan van der LubbenNo ratings yet