You might also like
- UR10e Product Fact SheetDocument1 pageUR10e Product Fact SheetArmandoPérezValdiviaNo ratings yet
- Agitador Reciproco DaihanDocument1 pageAgitador Reciproco DaihanCristian SamboniNo ratings yet
- PF400 PDFDocument2 pagesPF400 PDFanupNo ratings yet
- Brochure PDFDocument9 pagesBrochure PDFken silkNo ratings yet
- CattronControl Excalibur by Cattron - Industrial Wireless Remote Control PDFDocument2 pagesCattronControl Excalibur by Cattron - Industrial Wireless Remote Control PDFJose Gabriel Aguirre AndradeNo ratings yet
- Universal Mechanical Tester: Innovation With IntegrityDocument4 pagesUniversal Mechanical Tester: Innovation With IntegrityDlair Ramadan0% (1)
- Ur3e RGB Fact Sheet Landscape A4Document1 pageUr3e RGB Fact Sheet Landscape A4nguyen HungNo ratings yet
- 9.5in OntrakDocument2 pages9.5in OntrakPaul Ticona SNo ratings yet
- Guided actuator DFM-16-100-P-A-GF data sheetDocument1 pageGuided actuator DFM-16-100-P-A-GF data sheetgNo ratings yet
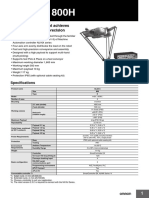
- Parallel Robot Quattro 800H Achieves High Speed PrecisionDocument2 pagesParallel Robot Quattro 800H Achieves High Speed PrecisionjorgemantillaNo ratings yet
- Seatex MRU D PDFDocument2 pagesSeatex MRU D PDFCindyNo ratings yet
- Sieve Shaker OCTAGON 200: General InformationDocument2 pagesSieve Shaker OCTAGON 200: General InformationSupriyo PNo ratings yet
- Autodyn II 300 2513 2514 LQ 96dpi 141017Document8 pagesAutodyn II 300 2513 2514 LQ 96dpi 141017Quynh TrangNo ratings yet
- 8026 TorqueMaster Technical SummaryDocument1 page8026 TorqueMaster Technical SummaryGabriela MotaNo ratings yet
- Flexible Automated Punching Machine: High Productivity - Compact Punching, Nibbling and FormingDocument6 pagesFlexible Automated Punching Machine: High Productivity - Compact Punching, Nibbling and FormingJosko SpehNo ratings yet
- Abb. Version with telescopic columnDocument10 pagesAbb. Version with telescopic columnNguyen AnhNo ratings yet
- Industrial RobotDocument2 pagesIndustrial Robotalejo linaresNo ratings yet
- Presentation IRB 140Document25 pagesPresentation IRB 140Nelson PereiraNo ratings yet
- Guia 11GHz 103468-P360-F090lms3-ExternalDocument2 pagesGuia 11GHz 103468-P360-F090lms3-ExternalGabriel MontenegroNo ratings yet
- Sieve Shaker OCTAGON 200: General InformationDocument2 pagesSieve Shaker OCTAGON 200: General InformationSupriyo PNo ratings yet
- Topcon GLS 2200Document2 pagesTopcon GLS 2200asepali005No ratings yet
- System Flyer PROSLIDE 32 B - V5.0 - 2020-03-09 PDFDocument10 pagesSystem Flyer PROSLIDE 32 B - V5.0 - 2020-03-09 PDFeduardoNo ratings yet
- Hdl5530Thb6365E: Boom Pump-63MDocument2 pagesHdl5530Thb6365E: Boom Pump-63MAkhmad SebehNo ratings yet
- Automatic Film Applicator LDocument1 pageAutomatic Film Applicator Lain kamarudinNo ratings yet
- ES_9380_DS_2021_07_22_EN_LTR (3)Document2 pagesES_9380_DS_2021_07_22_EN_LTR (3)Wasan SuwannahongNo ratings yet
- 5 Mux Model-907-GbeDocument2 pages5 Mux Model-907-GbeDuc LeNo ratings yet
- MULTIBELT® Multi-Idler Belt WeighersDocument4 pagesMULTIBELT® Multi-Idler Belt WeighersDan Hidalgo QuintoNo ratings yet
- Multibelt Multi-Idler PDFDocument4 pagesMultibelt Multi-Idler PDFHoànNo ratings yet
- Husqvarna DXR Demolition Robots DXR 140Document2 pagesHusqvarna DXR Demolition Robots DXR 140Tiago PaivaNo ratings yet
- Hexapod: Six Degrees of Freedom Motion Platform For Advanced ResearchDocument2 pagesHexapod: Six Degrees of Freedom Motion Platform For Advanced ResearchAkua AlderNo ratings yet
- Th-130 Universal Hardness TesterDocument2 pagesTh-130 Universal Hardness TesterJuan CarlosNo ratings yet
- SmartDongle 4GDocument1 pageSmartDongle 4GGlobal NewsNo ratings yet
- Agilis Parabolic Manpack Satellite Terminal Tripod Spec SheetDocument2 pagesAgilis Parabolic Manpack Satellite Terminal Tripod Spec SheetJhonatan AguileraNo ratings yet
- 05 - RW-N61-1586-000-001 - HR04 - RWA - 17012018-BroDocument1 page05 - RW-N61-1586-000-001 - HR04 - RWA - 17012018-Brofranco.sosaNo ratings yet
- Schilling Titan 4 With Spares KitDocument5 pagesSchilling Titan 4 With Spares KitQ InformaticaNo ratings yet
- PrimeMotion C ENDocument2 pagesPrimeMotion C ENHAPPY KLUBNo ratings yet
- The Smart Cordless Polisher 10,8 V, Rotary and Random Orbital Free-RunningDocument1 pageThe Smart Cordless Polisher 10,8 V, Rotary and Random Orbital Free-RunningDejan PuhalićNo ratings yet
- Ur5e RGB Fact Sheet Landscape A4Document1 pageUr5e RGB Fact Sheet Landscape A4Angel MartínezNo ratings yet
- CJBrochureDocument16 pagesCJBrochurejcvf1No ratings yet
- 6'' VMG-55DVHX2Document1 page6'' VMG-55DVHX2REGHIS HaouesNo ratings yet
- Weld-Overlay - Cladding - Solutions - 2017 - ENDocument36 pagesWeld-Overlay - Cladding - Solutions - 2017 - ENbaladiroyaNo ratings yet
- Lexium Mdrive: LMD - P57 Pulse / Direction InputDocument5 pagesLexium Mdrive: LMD - P57 Pulse / Direction InputTăng TrườngNo ratings yet
- TX2-140/160 Robot Range: Integration Flexibility and Modular ScalabilityDocument2 pagesTX2-140/160 Robot Range: Integration Flexibility and Modular ScalabilityDũng DungNo ratings yet
- Ur 10 Spec Manual RobotDocument1 pageUr 10 Spec Manual RobotAsim PedicNo ratings yet
- Cost Savings Through Intelligent Robotization For The 21 CenturyDocument8 pagesCost Savings Through Intelligent Robotization For The 21 CenturySanta Kim100% (1)
- Multi-Function Rebar Detector ReviewDocument8 pagesMulti-Function Rebar Detector ReviewZarko LazicNo ratings yet
- 174 V816pdg1xa2 Spec SheetDocument1 page174 V816pdg1xa2 Spec SheetMichaelNo ratings yet
- Brochure XL Gamme Complète - V6Document4 pagesBrochure XL Gamme Complète - V6francoemanuelNo ratings yet
- Compact Seal Type 0820Document6 pagesCompact Seal Type 0820scuff08No ratings yet
- Info 116 enDocument87 pagesInfo 116 enZona Educación Especial ZacapaoaxtlaNo ratings yet
- SmokemtrDocument1 pageSmokemtrStefanos DiamantisNo ratings yet
- Gesamt EN WebDocument76 pagesGesamt EN WebmstevkaNo ratings yet
- Portable Shaker TableDocument2 pagesPortable Shaker TablesohailNo ratings yet
- P200(2页)Document2 pagesP200(2页)guwniarzykNo ratings yet
- Belt Conveyo2Document15 pagesBelt Conveyo2Gridbots TechnologiesNo ratings yet
- Gerbercutter Z7: Precision. Productivity. PerformanceDocument2 pagesGerbercutter Z7: Precision. Productivity. PerformanceDat HaNo ratings yet
- 3RT10261BB40 Datasheet enDocument7 pages3RT10261BB40 Datasheet enzhnlsn36522No ratings yet
- PRUEBA SABER GRADO 1 PDF Mayo 20-20 PDFDocument1 pagePRUEBA SABER GRADO 1 PDF Mayo 20-20 PDFzhnlsn36522No ratings yet
- Nelson Zambrano: Listening Section Reading SectionDocument1 pageNelson Zambrano: Listening Section Reading Sectionzhnlsn36522No ratings yet
- Salida Astevu 040218Document1 pageSalida Astevu 040218zhnlsn36522No ratings yet
- Prueba Diagnostic A UMT-UTDocument3 pagesPrueba Diagnostic A UMT-UTzhnlsn36522No ratings yet
- DS1820 1-Wire Digital ThermometerDocument27 pagesDS1820 1-Wire Digital ThermometerIsaias Ortiz ReyesNo ratings yet
- Full Assembily Beta 1.2Document5 pagesFull Assembily Beta 1.2zhnlsn36522No ratings yet
- ULN2003Document7 pagesULN2003Francisco LaudaresNo ratings yet
- C# Fundamentals For Absolute Beginners: Course DescriptionDocument3 pagesC# Fundamentals For Absolute Beginners: Course DescriptiongregNo ratings yet
- EMUI 10 Rollback Guide < 40 charsDocument11 pagesEMUI 10 Rollback Guide < 40 charsjuanqwNo ratings yet
- Printing - Creating A Macro - HM-8000Document8 pagesPrinting - Creating A Macro - HM-8000api-19817003No ratings yet
- Datasheet: Synchrotech PCMCIA PC Card Type II To CompactFlash AdapterDocument1 pageDatasheet: Synchrotech PCMCIA PC Card Type II To CompactFlash AdapterSynchrotechNo ratings yet
- 7020R-48 Datasheet PDFDocument10 pages7020R-48 Datasheet PDFDonald KasemtanachoteNo ratings yet
- AEM I TestDocument235 pagesAEM I TestReetika JainNo ratings yet
- Visual Programming Module II NotesDocument85 pagesVisual Programming Module II Notesmonica jumaNo ratings yet
- Grade 6 Worksheet 2Document2 pagesGrade 6 Worksheet 2Ramocles FernandoNo ratings yet
- ArcPad 7 UserGuide 1105Document414 pagesArcPad 7 UserGuide 1105Joana NamoraNo ratings yet
- AceableAgent Launches First TREC-Approved Real Estate Continuing Education Course With Native Mobile AppDocument2 pagesAceableAgent Launches First TREC-Approved Real Estate Continuing Education Course With Native Mobile AppPR.comNo ratings yet
- VERIPOS - Technical (1) LD3 PDFDocument25 pagesVERIPOS - Technical (1) LD3 PDFArnoldo López Méndez100% (1)
- Microcontroller Lab Manual for Electronics StudentsDocument54 pagesMicrocontroller Lab Manual for Electronics StudentsParthaSarathyNo ratings yet
- Wi-Fi Jamming Using Raspberry Pi: ISSN: 1314-3395 (On-Line Version) Url: Http://acadpubl - Eu/hub Special IssueDocument8 pagesWi-Fi Jamming Using Raspberry Pi: ISSN: 1314-3395 (On-Line Version) Url: Http://acadpubl - Eu/hub Special IssueSarangNo ratings yet
- HRM (Mr. Nadeem Suleman)Document18 pagesHRM (Mr. Nadeem Suleman)Life at Nust UniversityNo ratings yet
- UC 7112 LX Plus User Guide 2 0 0Document19 pagesUC 7112 LX Plus User Guide 2 0 0markelovfyodorNo ratings yet
- Project ListDocument66 pagesProject Listapi-278127585No ratings yet
- D59999GC30 Sg2.unlocked PDFDocument230 pagesD59999GC30 Sg2.unlocked PDFaeteromNo ratings yet
- Installation-SAPGUI For Windows For V750Document16 pagesInstallation-SAPGUI For Windows For V75027296621No ratings yet
- The Great AwkDocument3 pagesThe Great AwkharijiNo ratings yet
- CCNA2 Chapter 6 ExamDocument9 pagesCCNA2 Chapter 6 ExamjkzhNo ratings yet
- Ruckus Zoneflex 7372Document4 pagesRuckus Zoneflex 7372Alberto SerraNo ratings yet
- Saep 206 PDFDocument7 pagesSaep 206 PDFRami ElloumiNo ratings yet
- Nishi Sharma: AWS Cloud EngineerDocument7 pagesNishi Sharma: AWS Cloud EngineerKritika ShuklaNo ratings yet
- The Ultimate C - E - HANAAW - 17 - SAP Certified Development Specialist - ABAP For SAP HANA 2.0Document2 pagesThe Ultimate C - E - HANAAW - 17 - SAP Certified Development Specialist - ABAP For SAP HANA 2.0KirstingNo ratings yet
- Computer-Aided Dispatch Application SheetDocument2 pagesComputer-Aided Dispatch Application SheetJoe HicksNo ratings yet
- English 7 Q2 Mod 3 Researching Information Using Print and Non-Print Media SourcesDocument19 pagesEnglish 7 Q2 Mod 3 Researching Information Using Print and Non-Print Media SourcesJeneros PartosNo ratings yet
- z/OS Introduction and Workshop: DocumentationDocument16 pagesz/OS Introduction and Workshop: DocumentationDenys HenriqueNo ratings yet
- Design and Implementation of Iot Based Smart Energy Meter: Abstract-Modern Day Smart Grid Technology Relies HeavilyDocument5 pagesDesign and Implementation of Iot Based Smart Energy Meter: Abstract-Modern Day Smart Grid Technology Relies HeavilyHarris BaigNo ratings yet
- Viettel Tanzania NodeB Integration InstructionsDocument19 pagesViettel Tanzania NodeB Integration InstructionsGoodluck D MsongoreNo ratings yet
- The SPY-TLT Universal Investment Strategy (UIS)Document9 pagesThe SPY-TLT Universal Investment Strategy (UIS)beetho1990No ratings yet