You might also like
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsFrom EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsNo ratings yet
- The Prosecutor's HandbookDocument162 pagesThe Prosecutor's HandbooksamuelNo ratings yet
- General Education September 2016Document195 pagesGeneral Education September 2016Ronalyn AndaganNo ratings yet
- DMC Bored Cast in Situ Pile ConcretingDocument38 pagesDMC Bored Cast in Situ Pile Concretingmaansi jakkidi100% (1)
- PID Tuning Classical Methods GuideDocument10 pagesPID Tuning Classical Methods GuideTolga DurudoganNo ratings yet
- Electrical Circuits with Variable Parameters: Including Pulsed-Control SystemsFrom EverandElectrical Circuits with Variable Parameters: Including Pulsed-Control SystemsNo ratings yet
- Zodiac Working Boat MK6HDDocument4 pagesZodiac Working Boat MK6HDdan antonNo ratings yet
- Classical Approach to Constrained and Unconstrained Molecular DynamicsFrom EverandClassical Approach to Constrained and Unconstrained Molecular DynamicsNo ratings yet
- Zieglar Nichols MethodDocument7 pagesZieglar Nichols MethodVinay RajeshNo ratings yet
- Controller DesignDocument253 pagesController DesignymvbnNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Benzoic Acid Production Business-47452 PDFDocument71 pagesBenzoic Acid Production Business-47452 PDFزهراء عادل عبد الزهرة إسماعيلNo ratings yet
- Controller Tuning Methods for PID LoopsDocument5 pagesController Tuning Methods for PID LoopsSubham SikdarNo ratings yet
- List of Dealers in NoidaDocument240 pagesList of Dealers in NoidaAparna Pande67% (3)
- Pid Tuning ClassicalDocument18 pagesPid Tuning ClassicalVo Quang HuyNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Market Segmentation Targeting Strategy and Positioning Strategy Performance Effects To The Tourists Satisfaction Research in Pangandaran Beach Pangandaran DistrictDocument10 pagesMarket Segmentation Targeting Strategy and Positioning Strategy Performance Effects To The Tourists Satisfaction Research in Pangandaran Beach Pangandaran DistrictRizki Kurnia husainNo ratings yet
- Implementation of Matlab-SIMULINK Based Real Time Temperature Control For Set Point ChangesDocument8 pagesImplementation of Matlab-SIMULINK Based Real Time Temperature Control For Set Point ChangesIngole DeepakNo ratings yet
- Self-Tuning of Fuzzy Logic Controllers in Cascade LoopsDocument8 pagesSelf-Tuning of Fuzzy Logic Controllers in Cascade LoopsCarlos BellatinNo ratings yet
- Ziegler Nichol'sDocument9 pagesZiegler Nichol'sLuis Daniel De La GarzaNo ratings yet
- Tuning of PID Controller Using Ziegler-Nichols Method For Speed Control of DC MotorDocument6 pagesTuning of PID Controller Using Ziegler-Nichols Method For Speed Control of DC Motoreubis_machado4370No ratings yet
- Sampled-data Control of Double Integrator Systems Using Bang-Bang FeedbackDocument4 pagesSampled-data Control of Double Integrator Systems Using Bang-Bang FeedbackRick GongNo ratings yet
- ZN Closed Loop MethodDocument7 pagesZN Closed Loop MethodJitesh EmmanuelNo ratings yet
- Matlab Exp 7Document9 pagesMatlab Exp 7Mohd RehanNo ratings yet
- 1993 Fuzzy Gain Scheduling of PID Controllers PDFDocument7 pages1993 Fuzzy Gain Scheduling of PID Controllers PDFChau MaiNo ratings yet
- Chapter 10 PID ControlsDocument35 pagesChapter 10 PID ControlsRiski SepTiadi RasyaNo ratings yet
- Auto-Tuning of PID Controllers Via Extremum SeekingDocument6 pagesAuto-Tuning of PID Controllers Via Extremum SeekingjuliiojaiimesNo ratings yet
- A Simple Method For On-Line Identification and Controller TuningDocument3 pagesA Simple Method For On-Line Identification and Controller TuningNMDVN100% (2)
- Chapter Three Controller Design and Tuning: UniversityDocument42 pagesChapter Three Controller Design and Tuning: UniversityAbdeta TerfaNo ratings yet
- 8.1. Lab ObjectiveDocument6 pages8.1. Lab ObjectiveJang-Suh Justin LeeNo ratings yet
- Tuning Fuzzy PIDDocument22 pagesTuning Fuzzy PIDGoegoes Dwi NNo ratings yet
- L-13 (SS) (Ia&c) ( (Ee) Nptel)Document8 pagesL-13 (SS) (Ia&c) ( (Ee) Nptel)Darkmatter DarkmatterrNo ratings yet
- Lab 9 - Cylinder Position Control With PID ControllerDocument14 pagesLab 9 - Cylinder Position Control With PID ControllerAlex GrattonNo ratings yet
- Empirical Tuning Rules According To Ziegler and NicholsDocument3 pagesEmpirical Tuning Rules According To Ziegler and NicholskalajamunNo ratings yet
- Servo FundamentalsDocument11 pagesServo Fundamentalsapi-3797895No ratings yet
- Ingeniería Automotriz: Teoria de ControlDocument25 pagesIngeniería Automotriz: Teoria de ControlPablo SandovalNo ratings yet
- Performance Comparison Between LQR and PID Controller For An Inverted Pendulum SystemDocument5 pagesPerformance Comparison Between LQR and PID Controller For An Inverted Pendulum SystemSanjiv CrNo ratings yet
- Real Time Temperature Control of Oven Using Matlab-SIMULINKDocument6 pagesReal Time Temperature Control of Oven Using Matlab-SIMULINKStudio gx contactNo ratings yet
- FUZZY BASED CONTROLLER FOR HEAVY DUTY GAS TURBINEDocument5 pagesFUZZY BASED CONTROLLER FOR HEAVY DUTY GAS TURBINERichard CleeNo ratings yet
- Matlab PaperDocument8 pagesMatlab PapersusmarohiNo ratings yet
- Lecture 11 (42-57)Document16 pagesLecture 11 (42-57)Saif AlabdullahNo ratings yet
- PID ControllerDocument13 pagesPID Controllerdar20092010No ratings yet
- Processcontrol Topic13 PidtuningDocument15 pagesProcesscontrol Topic13 Pidtuningmuthukumartharani100% (1)
- Erciyes University Mechatronics Engineering Control Systems-II PID Control ProjectDocument12 pagesErciyes University Mechatronics Engineering Control Systems-II PID Control Projectsedo1991No ratings yet
- PID Tuning Using Extremum SeekingDocument10 pagesPID Tuning Using Extremum Seekinggautam28461No ratings yet
- Controller TuningDocument7 pagesController TuningsaxenanikitaNo ratings yet
- Workshop#10 Report - Cascade Control of Jacketed Reactor - Roy - StewartDocument14 pagesWorkshop#10 Report - Cascade Control of Jacketed Reactor - Roy - Stewartdevbones18No ratings yet
- Controlling of D.C. Motor Using Fuzzy Logic Controller: Husain AhmedDocument5 pagesControlling of D.C. Motor Using Fuzzy Logic Controller: Husain AhmedCristian SsggNo ratings yet
- bài báo cáo httd cuối kìDocument7 pagesbài báo cáo httd cuối kìHoàng TháiNo ratings yet
- Servo FundamentalsDocument12 pagesServo FundamentalsMohanraj SelvakumarNo ratings yet
- Priprema Za Ispit 2Document8 pagesPriprema Za Ispit 2Aleksandar MicicNo ratings yet
- Relaxed ZN Tuning of PI ControllersDocument15 pagesRelaxed ZN Tuning of PI ControllersAkhilesh Kumar MishraNo ratings yet
- The Good Gain Method For Simple Experimental TuninDocument12 pagesThe Good Gain Method For Simple Experimental TuninANVESH DONTULANo ratings yet
- Refinements of The Ziegler Nichols Tuning Formula C.C PDFDocument8 pagesRefinements of The Ziegler Nichols Tuning Formula C.C PDFdautroc13No ratings yet
- Auto Tuning of PID Controller For MIMO Processes: M. J. Lengare, R. H. Chile, L. M. Waghmare and Bhavesh ParmarDocument4 pagesAuto Tuning of PID Controller For MIMO Processes: M. J. Lengare, R. H. Chile, L. M. Waghmare and Bhavesh ParmarDavid DebonoNo ratings yet
- Journal of Electrical Engineering & Technology (JEET) : ©iaemeDocument8 pagesJournal of Electrical Engineering & Technology (JEET) : ©iaemeIAEME PublicationNo ratings yet
- Cascaded PIDDocument14 pagesCascaded PIDTatenda BizureNo ratings yet
- PID Controller Tuning For Integrating and Unstable Processes With Time DelayDocument13 pagesPID Controller Tuning For Integrating and Unstable Processes With Time DelayAnonymous WkbmWCa8MNo ratings yet
- Filehost 6544062 Daniel Goleman Inteligenta EmotinalaDocument11 pagesFilehost 6544062 Daniel Goleman Inteligenta EmotinalaAdrian-Daniel NechitaNo ratings yet
- A Method For The Auto-Calibration of PID ControllersDocument13 pagesA Method For The Auto-Calibration of PID ControllersJuan SantanaNo ratings yet
- Bkf3791 Pci Lab - Group 2 - Experiment 7Document20 pagesBkf3791 Pci Lab - Group 2 - Experiment 7Lee Jian RongNo ratings yet
- New of Nonlinear: Class ControllersDocument7 pagesNew of Nonlinear: Class Controllersanon_102072030No ratings yet
- Closed-Loopautomatic Tuning of PID Controller For Nonlinear SystemsDocument7 pagesClosed-Loopautomatic Tuning of PID Controller For Nonlinear SystemsVictor YuzhaninNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- CamScanner Scanned DocsDocument7 pagesCamScanner Scanned Docsزهراء عادل عبد الزهرة إسماعيلNo ratings yet
- Production of Naphthalene.Document101 pagesProduction of Naphthalene.زهراء عادل عبد الزهرة إسماعيلNo ratings yet
- اسئلة الفاينل كورس ثاني ظواهر الانتقال م ٢٠٢٠٠٦٠٢٠٠٣١٢٢ PDFDocument10 pagesاسئلة الفاينل كورس ثاني ظواهر الانتقال م ٢٠٢٠٠٦٠٢٠٠٣١٢٢ PDFزهراء عادل عبد الزهرة إسماعيلNo ratings yet
- problem 9-6 - ٢٠٢٠٠٥١١١٦١٩٤٧Document3 pagesproblem 9-6 - ٢٠٢٠٠٥١١١٦١٩٤٧زهراء عادل عبد الزهرة إسماعيلNo ratings yet
- اسئلة الفاينل كورس ثاني ظواهر الانتقال م ٢٠٢٠٠٦٠٢٠٠٣١٢٢ PDFDocument10 pagesاسئلة الفاينل كورس ثاني ظواهر الانتقال م ٢٠٢٠٠٦٠٢٠٠٣١٢٢ PDFزهراء عادل عبد الزهرة إسماعيلNo ratings yet
- مشروع انتاج الامونيا الكامل Rrrr1895477265 PDFDocument86 pagesمشروع انتاج الامونيا الكامل Rrrr1895477265 PDFزهراء عادل عبد الزهرة إسماعيلNo ratings yet
- اسئلة الفاينل كورس ثاني ظواهر الانتقال م ٢٠٢٠٠٦٠٢٠٠٣١٢٢ PDFDocument10 pagesاسئلة الفاينل كورس ثاني ظواهر الانتقال م ٢٠٢٠٠٦٠٢٠٠٣١٢٢ PDFزهراء عادل عبد الزهرة إسماعيلNo ratings yet
- اسئلة الفاينل كورس ثاني ظواهر الانتقال م ٢٠٢٠٠٦٠٢٠٠٣١٢٢ PDFDocument10 pagesاسئلة الفاينل كورس ثاني ظواهر الانتقال م ٢٠٢٠٠٦٠٢٠٠٣١٢٢ PDFزهراء عادل عبد الزهرة إسماعيلNo ratings yet
- Production of Sulfuric Acid ReportDocument70 pagesProduction of Sulfuric Acid Reportزهراء عادل عبد الزهرة إسماعيلNo ratings yet
- Production of Sulfuric Acid ReportDocument70 pagesProduction of Sulfuric Acid Reportزهراء عادل عبد الزهرة إسماعيلNo ratings yet
- مجموعة اسئلة وحلول لمادة الادارة الصناعي ٢٠٢٠٠٥٣٠٠٩٥٣٢٦Document12 pagesمجموعة اسئلة وحلول لمادة الادارة الصناعي ٢٠٢٠٠٥٣٠٠٩٥٣٢٦زهراء عادل عبد الزهرة إسماعيلNo ratings yet
- Production of Sulfure-FreeDocument90 pagesProduction of Sulfure-Freeزهراء عادل عبد الزهرة إسماعيلNo ratings yet
- Engine Tune-UpDocument43 pagesEngine Tune-UpЮра ПетренкоNo ratings yet
- California Evaluation Procedures For New Aftermarket Catalytic ConvertersDocument27 pagesCalifornia Evaluation Procedures For New Aftermarket Catalytic Convertersferio252No ratings yet
- ) (Significant Digits Are Bounded To 1 Due To 500m. However I Will Use 2SD To Make More Sense of The Answers)Document4 pages) (Significant Digits Are Bounded To 1 Due To 500m. However I Will Use 2SD To Make More Sense of The Answers)JeevikaGoyalNo ratings yet
- Wiz107sr User Manual en v1.0Document29 pagesWiz107sr User Manual en v1.0Pauli Correa ArriagadaNo ratings yet
- DES-3611.prepaway - Premium.exam.65q: Number: DES-3611 Passing Score: 800 Time Limit: 120 Min File Version: 1.1Document22 pagesDES-3611.prepaway - Premium.exam.65q: Number: DES-3611 Passing Score: 800 Time Limit: 120 Min File Version: 1.1Emre Halit POLATNo ratings yet
- Theory of Planned Behaviour (TPB)Document18 pagesTheory of Planned Behaviour (TPB)Afiq Wahyu AjiNo ratings yet
- Kalokal Barangay Highway HillsDocument35 pagesKalokal Barangay Highway HillsDixie MirandaNo ratings yet
- Technical Data About The Production of Steel StructuresDocument2 pagesTechnical Data About The Production of Steel StructuresPress EscapeNo ratings yet
- Nursing Grand Rounds Reviewer PDFDocument17 pagesNursing Grand Rounds Reviewer PDFAlyssa Jade GolezNo ratings yet
- Nikita Rajput: Anchor/Host/Master of CeremoniesDocument21 pagesNikita Rajput: Anchor/Host/Master of CeremoniesnamanNo ratings yet
- Subhasis Patra CV V3Document5 pagesSubhasis Patra CV V3Shubh SahooNo ratings yet
- Template Research ProjectDocument13 pagesTemplate Research ProjectTuấn Anh Đoàn CôngNo ratings yet
- SatconDocument18 pagesSatconBADRI VENKATESHNo ratings yet
- Khor Al Maqta Project Near AFOCH HotelDocument2 pagesKhor Al Maqta Project Near AFOCH HotelDennis Michael P. EscobarNo ratings yet
- International Journal of Plasticity: Dong Phill Jang, Piemaan Fazily, Jeong Whan YoonDocument17 pagesInternational Journal of Plasticity: Dong Phill Jang, Piemaan Fazily, Jeong Whan YoonGURUDAS KARNo ratings yet
- 11 Core CompetenciesDocument11 pages11 Core CompetenciesrlinaoNo ratings yet
- How To Install Blue PrismDocument2 pagesHow To Install Blue PrismRanjith NarayanNo ratings yet
- Jasmine Nagata Smart GoalsDocument5 pagesJasmine Nagata Smart Goalsapi-319625868No ratings yet
- KEDIT User's GuideDocument294 pagesKEDIT User's GuidezamNo ratings yet
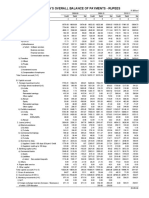
- Table 141: India'S Overall Balance of Payments - RupeesDocument2 pagesTable 141: India'S Overall Balance of Payments - Rupeesmahbobullah rahmaniNo ratings yet
- Elite Physics G10 T2 SLA1Document7 pagesElite Physics G10 T2 SLA1thecubeg0No ratings yet
- Petitioner Vs Vs Respondents Marcial Esposo Eulogio F. Lerum M. A. FerrerDocument4 pagesPetitioner Vs Vs Respondents Marcial Esposo Eulogio F. Lerum M. A. Ferrerclarisse lyka hattonNo ratings yet
- Etextbook 978 0078025884 Accounting Information Systems 4th EditionDocument61 pagesEtextbook 978 0078025884 Accounting Information Systems 4th Editionmark.dame383100% (49)
- UmehDocument2 pagesUmehAdeleke AyobamiNo ratings yet