You might also like
- PLC Programming from Novice to Professional: Learn PLC Programming with Training VideosFrom EverandPLC Programming from Novice to Professional: Learn PLC Programming with Training VideosRating: 5 out of 5 stars5/5 (1)
- Motor Acceleration AnalysisDocument67 pagesMotor Acceleration AnalysisManohar Potnuru100% (2)
- Framing MMT - Modern Money NetworkDocument23 pagesFraming MMT - Modern Money NetworkUmkc Economists86% (7)
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisFrom EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisRating: 4 out of 5 stars4/5 (2)
- Develop Your Leadership SkillsDocument22 pagesDevelop Your Leadership Skillsektasharma123No ratings yet
- Introduction to the simulation of power plants for EBSILON®Professional Version 15From EverandIntroduction to the simulation of power plants for EBSILON®Professional Version 15No ratings yet
- C6.6 Speed Timing Calibration SetupDocument2 pagesC6.6 Speed Timing Calibration Setupharikrishnanpd3327No ratings yet
- Electric Motors and Drives: Fundamentals, Types and ApplicationsFrom EverandElectric Motors and Drives: Fundamentals, Types and ApplicationsRating: 4.5 out of 5 stars4.5/5 (12)
- 160HDocument27 pages160Hmtocbv100% (3)
- Service Manual GT46 MACDocument887 pagesService Manual GT46 MACmadhwan sharma100% (2)
- Motor Starting Calculation NotesDocument3 pagesMotor Starting Calculation NotesrajeshNo ratings yet
- Introduction of PowerCom Genset Controls for 320-625KVA NodesDocument8 pagesIntroduction of PowerCom Genset Controls for 320-625KVA NodesTaz UddinNo ratings yet
- EMT3-C10186 Manual (Rev. 1) W E-Stop and Throttle Pot (71610)Document17 pagesEMT3-C10186 Manual (Rev. 1) W E-Stop and Throttle Pot (71610)Matias Contreras Köbrich100% (2)
- HPV 900 Series 2 Ac PM tm7333 r22 PDFDocument228 pagesHPV 900 Series 2 Ac PM tm7333 r22 PDFFaizNo ratings yet
- ECU Tuning April2010 PDFDocument140 pagesECU Tuning April2010 PDFStefaan PhilipsNo ratings yet
- Create One-Line Diagram in ETAPDocument36 pagesCreate One-Line Diagram in ETAPjopaypagas80% (35)
- 140h 5hm Pruebas y Ajustes de Transmision ElectronicaDocument28 pages140h 5hm Pruebas y Ajustes de Transmision ElectronicaSebastian Bonello100% (1)
- Thomson Electrac HD Linear Actuator Motion Control per CAN BusFrom EverandThomson Electrac HD Linear Actuator Motion Control per CAN BusNo ratings yet
- Motor Starting CasestudyDocument2 pagesMotor Starting Casestudykajale_shrikant2325No ratings yet
- Mushroom Storage and ProcessingDocument5 pagesMushroom Storage and ProcessingKho Siong Thong80% (5)
- Tutorial: Distribution Load FlowDocument9 pagesTutorial: Distribution Load FlowDavid Yungan GonzalezNo ratings yet
- Demethanizer OperationDocument6 pagesDemethanizer OperationHoustonAbducteeNo ratings yet
- 1081 Camid Vs Op DigestDocument2 pages1081 Camid Vs Op DigestLennart Reyes67% (3)
- Etap Star and Transient StabilityDocument61 pagesEtap Star and Transient StabilitySupriyanto SuhonoNo ratings yet
- AC Electric Motors Control: Advanced Design Techniques and ApplicationsFrom EverandAC Electric Motors Control: Advanced Design Techniques and ApplicationsFouad GiriNo ratings yet
- Human Behavior in OrganizationsDocument5 pagesHuman Behavior in OrganizationsJennybabe Peta100% (1)
- Dhi-Ehs-Hsm-028 Work Over Water Rev0Document5 pagesDhi-Ehs-Hsm-028 Work Over Water Rev0Phạm Đình NghĩaNo ratings yet
- ETAP User Guide 7 0Document448 pagesETAP User Guide 7 0mrivero1983No ratings yet
- Facilitate Training Session Powerpoint PresentationDocument16 pagesFacilitate Training Session Powerpoint Presentationscribdhie100% (2)
- Opera Swing Service Manual MotorDocument20 pagesOpera Swing Service Manual MotorAndrey100% (1)
- Motor Starting Simulation in PowerFactoryDocument10 pagesMotor Starting Simulation in PowerFactorymohamed faisalNo ratings yet
- Mission-Critical Facility Modeling: Utility, Generators, UPM (Stationary And/or Rotary)Document21 pagesMission-Critical Facility Modeling: Utility, Generators, UPM (Stationary And/or Rotary)gilbertomjcNo ratings yet
- Aimil LTD.,: The Troubleshooting Manual Compression Testing MachineDocument6 pagesAimil LTD.,: The Troubleshooting Manual Compression Testing Machinevasudeva yasasNo ratings yet
- Technical and Vocational Education Faculty: Engineering Education Department (JPK)Document27 pagesTechnical and Vocational Education Faculty: Engineering Education Department (JPK)Farahnasuhaa JamilNo ratings yet
- Experiment 10 Study of Different Excitation Schemes For Emergency Diesel GeneratorDocument13 pagesExperiment 10 Study of Different Excitation Schemes For Emergency Diesel GeneratorAwais KhalidNo ratings yet
- Engrmece3350u Lab Handbook f2014Document52 pagesEngrmece3350u Lab Handbook f2014Bob LeeNo ratings yet
- Adv Trans NuclearDocument33 pagesAdv Trans NuclearJose Alberto RodriguezNo ratings yet
- CG Emotron M20Instruction Manual01-5958-01R0 enDocument56 pagesCG Emotron M20Instruction Manual01-5958-01R0 enTudorache IulianNo ratings yet
- PSCAD Cookbook: Induction Machines StudyDocument27 pagesPSCAD Cookbook: Induction Machines Studypower systemNo ratings yet
- Open Source Rover: Calibration: Authors: Michael Cox, Eric Junkins, Olivia LofaroDocument13 pagesOpen Source Rover: Calibration: Authors: Michael Cox, Eric Junkins, Olivia Lofaroksh.sahNo ratings yet
- Type PST Specification Guide: SoftstartersDocument12 pagesType PST Specification Guide: SoftstartersgarysNo ratings yet
- Grid-Connected Induction Generator - 2021Document8 pagesGrid-Connected Induction Generator - 2021Game PlayNo ratings yet
- C6.4 Engine Timing CalibrationsDocument4 pagesC6.4 Engine Timing CalibrationsKopyuk Kopyuk Kopyuk KopyukNo ratings yet
- Technical and Vocational Education Faculty Engineering Education Department (JPK) Single Phase AC Machines Part 1 Capacitor Motor Connection and StartingDocument25 pagesTechnical and Vocational Education Faculty Engineering Education Department (JPK) Single Phase AC Machines Part 1 Capacitor Motor Connection and StartingFarahnasuhaa JamilNo ratings yet
- Four-Quadrant: Dynamometer/Power Supply MODEL 8960Document16 pagesFour-Quadrant: Dynamometer/Power Supply MODEL 8960Jose Angel Puente PuenteNo ratings yet
- Documentation CFC Templates Motor - Rev.01Document11 pagesDocumentation CFC Templates Motor - Rev.01cuongNo ratings yet
- Dyna DCMC Curriculam ManualDocument203 pagesDyna DCMC Curriculam ManualDevSinghNo ratings yet
- Energy Saving in Induction MotorsDocument11 pagesEnergy Saving in Induction MotorsS Bharadwaj ReddyNo ratings yet
- AltronicDocument89 pagesAltronicMaxiSanchezNo ratings yet
- Troubleshooting Guide for 12V14 TAG Engine Fuel Injection SystemDocument10 pagesTroubleshooting Guide for 12V14 TAG Engine Fuel Injection SystemAadarsh ReddyNo ratings yet
- Simulating Variable Speed Motor Control - Advanced Component..Document7 pagesSimulating Variable Speed Motor Control - Advanced Component..Paulo JerônimoNo ratings yet
- Frequency converter sizing: Understanding motor load characteristics and methods for selecting the right FC ratingDocument7 pagesFrequency converter sizing: Understanding motor load characteristics and methods for selecting the right FC ratingAugusto De la CruzNo ratings yet
- Result Paper: (TMS320 F 28027) Microcontroller Based PWM Signal Generation For Speed Control of DC MotorDocument3 pagesResult Paper: (TMS320 F 28027) Microcontroller Based PWM Signal Generation For Speed Control of DC MotorEditor IJRITCCNo ratings yet
- QNET Exp1 Speed StudentDocument18 pagesQNET Exp1 Speed StudentMatheus MaterazziNo ratings yet
- WJ - 00 - 08B - Starting SystemDocument12 pagesWJ - 00 - 08B - Starting SystemCesar BartzNo ratings yet
- Motor Bi-Direction Rotation and Dynamic Braking Control ExperimentDocument3 pagesMotor Bi-Direction Rotation and Dynamic Braking Control ExperimentJayson AlvaNo ratings yet
- 9U-7500 Transmission Analyzer II (3030, 0783)Document23 pages9U-7500 Transmission Analyzer II (3030, 0783)KlechNo ratings yet
- MS Exercise 3Document8 pagesMS Exercise 3Samir AlzekriNo ratings yet
- Pump Manuals - Op-MV600Document6 pagesPump Manuals - Op-MV600kuladeepkatragaddaNo ratings yet
- Moog ServoDrives RMC - T161 - CAN - Interpol Manual enDocument104 pagesMoog ServoDrives RMC - T161 - CAN - Interpol Manual enJorge SarmientoNo ratings yet
- CPU-XL VariSpark IOM 12-13Document97 pagesCPU-XL VariSpark IOM 12-13SaasiNo ratings yet
- 17-4112A - Característica de La Hora Del Motor ESM2Document3 pages17-4112A - Característica de La Hora Del Motor ESM2jonathanNo ratings yet
- Ee433 Lab Appendix: Case Study Using Powerworld Simulator: Basic Menu FunctionsDocument15 pagesEe433 Lab Appendix: Case Study Using Powerworld Simulator: Basic Menu Functionssolo4000No ratings yet
- SMC Flex Parameters1RDocument7 pagesSMC Flex Parameters1RSergio SuarezNo ratings yet
- OMM Starting The Engine Marine Certification Society (MCS) Control PanelDocument4 pagesOMM Starting The Engine Marine Certification Society (MCS) Control Paneljordan navarroNo ratings yet
- Hardware Requirements: Machine Vision Using LabviewDocument26 pagesHardware Requirements: Machine Vision Using LabviewLokesh DnNo ratings yet
- Variador Yanwa AcerosDocument9 pagesVariador Yanwa Acerosjuan Carlos GonzalezNo ratings yet
- Datasheet 98-8960-0 en 120V 60HzDocument36 pagesDatasheet 98-8960-0 en 120V 60HzVanessa OggNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Motor Size 355 - Ie3 Atex - IecexDocument4 pagesMotor Size 355 - Ie3 Atex - IecexFiroz PawaskarNo ratings yet
- Iec Motor Frame Chart: Frame Size A B H D EDocument1 pageIec Motor Frame Chart: Frame Size A B H D ENtalas ThanasisNo ratings yet
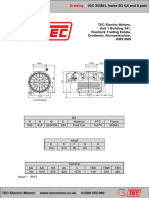
- IEC 355M/L Frame B3 4,6 and 8 Pole: DrawingDocument1 pageIEC 355M/L Frame B3 4,6 and 8 Pole: DrawingDavid Yungan GonzalezNo ratings yet
- User Manual: Power Factor Correction Regulator BLR-CX 6 To 14 StepsDocument8 pagesUser Manual: Power Factor Correction Regulator BLR-CX 6 To 14 StepsWiraka DatiNo ratings yet
- Tutorial: Capacitor PlacementDocument3 pagesTutorial: Capacitor PlacementDavid Yungan GonzalezNo ratings yet
- Tutorial: Using CYMVIEW Plotting ToolsDocument5 pagesTutorial: Using CYMVIEW Plotting ToolsDavid Yungan GonzalezNo ratings yet
- Fast Bluesy Lick - Key DM - Eb TuningDocument1 pageFast Bluesy Lick - Key DM - Eb TuningDavid Yungan GonzalezNo ratings yet
- Tutorial: Display OptionsDocument6 pagesTutorial: Display OptionsDavid Yungan GonzalezNo ratings yet
- Tutorial: Distribution Reliability AssessmentDocument5 pagesTutorial: Distribution Reliability AssessmentDavid Yungan GonzalezNo ratings yet
- Tutorial: Background MapDocument2 pagesTutorial: Background MapDavid Yungan GonzalezNo ratings yet
- Tutorial: Arc Flash AnalysisDocument7 pagesTutorial: Arc Flash AnalysisDavid Yungan GonzalezNo ratings yet
- Tutorial: Energy Profiles ManagerDocument6 pagesTutorial: Energy Profiles ManagerDavid Yungan GonzalezNo ratings yet
- Tutorial: Distributed GenerationDocument6 pagesTutorial: Distributed GenerationDavid Yungan GonzalezNo ratings yet
- Alstom CDAG Relay ManualDocument5 pagesAlstom CDAG Relay Manualkeith_home100% (1)
- Network Protection & Automation Guide - NPAG 2011 AlstomDocument508 pagesNetwork Protection & Automation Guide - NPAG 2011 Alstomhenry100% (1)
- DNV Casualty Info 2011 #3Document2 pagesDNV Casualty Info 2011 #3Sureen NarangNo ratings yet
- Decolonising The FutureDocument20 pagesDecolonising The Futurebybee7207No ratings yet
- Editable Classroom Officers TemplateDocument6 pagesEditable Classroom Officers TemplateRachelle AbalosNo ratings yet
- Penetron Admix FlyerDocument2 pagesPenetron Admix Flyernght7942No ratings yet
- Absorbance at 405Nm: United States PatentDocument20 pagesAbsorbance at 405Nm: United States Patentfelipe_fismed4429No ratings yet
- Dialogic DSI Signaling Servers: SIU Mode User ManualDocument304 pagesDialogic DSI Signaling Servers: SIU Mode User ManualAdiansyah Rama67% (3)
- SMAI Assignment 7 Report - 20161204 PDFDocument6 pagesSMAI Assignment 7 Report - 20161204 PDFAliNo ratings yet
- AESO ENERGY TRADING SYSTEM TRAINING Course Net Settlement Instructions VersionDocument19 pagesAESO ENERGY TRADING SYSTEM TRAINING Course Net Settlement Instructions VersionJustyna LipskaNo ratings yet
- Hydrogen Plant For The New MillenniumDocument21 pagesHydrogen Plant For The New Millenniumapi-3799861100% (2)
- Pengembangan Lembar Kegiatan Siswa Berbasis Online Berbantuan Geogebra Book Untuk Siswa SMA Kelas X Pada Materi TrigonometriDocument15 pagesPengembangan Lembar Kegiatan Siswa Berbasis Online Berbantuan Geogebra Book Untuk Siswa SMA Kelas X Pada Materi TrigonometriNovita Rizki YustianiNo ratings yet
- Coal Petroleum: Crude OilDocument25 pagesCoal Petroleum: Crude Oiljojo basenNo ratings yet
- MCQ (Trigo)Document10 pagesMCQ (Trigo)RaghavNo ratings yet
- Order From U.S. Disctrict Judge Jesus G. Bernal To Chino Valley UnifiedDocument9 pagesOrder From U.S. Disctrict Judge Jesus G. Bernal To Chino Valley UnifiedBeau YarbroughNo ratings yet
- ANGCOS - The Challenge and The Future For OrganizationsDocument28 pagesANGCOS - The Challenge and The Future For Organizationshoney beeNo ratings yet
- DataSheet ULCAB300Document2 pagesDataSheet ULCAB300Yuri OliveiraNo ratings yet
- The Influence of Culture Subculture On Consumer BehaviorDocument55 pagesThe Influence of Culture Subculture On Consumer Behaviorvijendra chanda100% (12)
- Compound Sentences FANBOYS WorksheetDocument7 pagesCompound Sentences FANBOYS WorksheetVerenice SuarezNo ratings yet
- Materials Storage and BuildingDocument3 pagesMaterials Storage and BuildingAmit GoyalNo ratings yet
- Psychrometrics Drying Problems SEODocument5 pagesPsychrometrics Drying Problems SEOStephanie Torrecampo Delima100% (2)
- Meita Juniar - 41921200002 - Teknik Sipil Reg b2 Uas English For EngineerDocument18 pagesMeita Juniar - 41921200002 - Teknik Sipil Reg b2 Uas English For EngineerREG.B/41921200002/MEITA JUNIARNo ratings yet
- Themed: MathematicsDocument32 pagesThemed: MathematicsMohamed LamihNo ratings yet
- Unit-II Inheritance and PointersDocument140 pagesUnit-II Inheritance and PointersAbhishekNo ratings yet