You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Nervurex & Malhasol - Malhas ElectrossoldadasDocument3 pagesNervurex & Malhasol - Malhas ElectrossoldadasAntonio BrasilNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Guide To Concrete Repair European StandardsDocument35 pagesA Guide To Concrete Repair European Standardsmaruthialto100% (1)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Intro To ModlingDocument61 pagesIntro To ModlingTobias NevarezNo ratings yet
- EC (104FC2019-1.5h) - 190905 - AEC + Prosoco - Complete Steel Stud-Masonry Veneer Wall SystemsDocument77 pagesEC (104FC2019-1.5h) - 190905 - AEC + Prosoco - Complete Steel Stud-Masonry Veneer Wall SystemsAntonio BrasilNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- EC (136FC2019-1h) - 190903 - AEC + CS - Expansion Joint Cover SystemsDocument74 pagesEC (136FC2019-1h) - 190903 - AEC + CS - Expansion Joint Cover SystemsAntonio BrasilNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Diamant Gkfi k716f de 2020-09 0 Eng ScreenDocument4 pagesDiamant Gkfi k716f de 2020-09 0 Eng ScreenAntonio BrasilNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- EC (135FC2019-1h) - 190904 - AEC + Clear - Concrete Faced Continuous Insulation SystemsDocument83 pagesEC (135FC2019-1h) - 190904 - AEC + Clear - Concrete Faced Continuous Insulation SystemsAntonio BrasilNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- EC (186FC2018-1.5h) - 190831 - AEC + Unilock - Permeable Interlocking Concrete Pavement For Stormwater ManagementDocument83 pagesEC (186FC2018-1.5h) - 190831 - AEC + Unilock - Permeable Interlocking Concrete Pavement For Stormwater ManagementAntonio BrasilNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- 7F-400 C-FLOOR E400 SL: Multifunctional Self-Levelling Epoxy Coating For FloorsDocument8 pages7F-400 C-FLOOR E400 SL: Multifunctional Self-Levelling Epoxy Coating For FloorsAntonio BrasilNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- EC (118FC2019-1h) - 190905 - AEC + ICPI - Structural Design of Interlocking Concrete Pavers For Municipal Streets and RoadwaysDocument78 pagesEC (118FC2019-1h) - 190905 - AEC + ICPI - Structural Design of Interlocking Concrete Pavers For Municipal Streets and RoadwaysAntonio Brasil100% (2)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Diamant Gkfi k716f de 2020-09 0 Eng ScreenDocument4 pagesDiamant Gkfi k716f de 2020-09 0 Eng ScreenAntonio BrasilNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Ancon - Tapered Thread CouplersDocument12 pagesAncon - Tapered Thread CouplersAntonio BrasilNo ratings yet
- 7F-400 C-FLOOR E400 SL: Multifunctional Self-Levelling Epoxy Coating For FloorsDocument8 pages7F-400 C-FLOOR E400 SL: Multifunctional Self-Levelling Epoxy Coating For FloorsAntonio BrasilNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Guide To Concrete Repair European StandardsDocument35 pagesA Guide To Concrete Repair European Standardsmaruthialto100% (1)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Toc Revit ST 2012Document7 pagesToc Revit ST 2012Minn ThannhtaikNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- #101 - Pilares - ArmadurasDocument25 pages#101 - Pilares - ArmadurasAntonio BrasilNo ratings yet
- EC2 - SAPATA DIMENSIONAMENTODocument1 pageEC2 - SAPATA DIMENSIONAMENTOAntonio BrasilNo ratings yet
- Soil & Rock Anchor Installation MethodsDocument4 pagesSoil & Rock Anchor Installation MethodsAntonio BrasilNo ratings yet
- Nge4 - Rock Anchors: Anchor Materials and Anchorage MethodsDocument12 pagesNge4 - Rock Anchors: Anchor Materials and Anchorage MethodsAntonio BrasilNo ratings yet
- EC (104FC2019-1.5h) - 190905 - AEC + Prosoco - Complete Steel Stud-Masonry Veneer Wall SystemsDocument77 pagesEC (104FC2019-1.5h) - 190905 - AEC + Prosoco - Complete Steel Stud-Masonry Veneer Wall SystemsAntonio BrasilNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Demolition WorksDocument5 pagesDemolition WorksAntonio BrasilNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- GE - Socketed H-PilesDocument1 pageGE - Socketed H-PilesAntonio BrasilNo ratings yet
- Governo Da Raem: Número Doc. Doc. Number Emissão Issue Data Emisão Issue DateDocument48 pagesGoverno Da Raem: Número Doc. Doc. Number Emissão Issue Data Emisão Issue DateAntonio BrasilNo ratings yet
- ISO 15874-1 - 2013 - General PDFDocument18 pagesISO 15874-1 - 2013 - General PDFAntonio BrasilNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- NGE2 - Modulus of Subgrade ReactionDocument1 pageNGE2 - Modulus of Subgrade ReactionAntonio BrasilNo ratings yet
- EC8 Seismic Design for Concrete StructuresDocument4 pagesEC8 Seismic Design for Concrete StructuresAntonio BrasilNo ratings yet
- Ancon - Tapered Thread CouplersDocument12 pagesAncon - Tapered Thread CouplersAntonio BrasilNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- EC (118FC2019-1h) - 190905 - AEC + ICPI - Structural Design of Interlocking Concrete Pavers For Municipal Streets and RoadwaysDocument78 pagesEC (118FC2019-1h) - 190905 - AEC + ICPI - Structural Design of Interlocking Concrete Pavers For Municipal Streets and RoadwaysAntonio Brasil100% (2)
- Nge4 - Rock Anchors: Anchor Materials and Anchorage MethodsDocument12 pagesNge4 - Rock Anchors: Anchor Materials and Anchorage MethodsAntonio BrasilNo ratings yet
- Syllabus of Leader Online Test Series Academic Session: (2020-2021)Document3 pagesSyllabus of Leader Online Test Series Academic Session: (2020-2021)Suhana Singh100% (1)
- Name of The Course: Data Structures (DS) Assignment - 1Document13 pagesName of The Course: Data Structures (DS) Assignment - 1080MeghanaNo ratings yet
- COBOL Quick RefresherDocument39 pagesCOBOL Quick Refresherpeeyush_pce2010No ratings yet
- Cambridge Primary Mathematics Activity Book 2nd EditionDocument14 pagesCambridge Primary Mathematics Activity Book 2nd EditionHihi40% (5)
- Chapter IIIDocument5 pagesChapter IIIFrelen Joy SaldeNo ratings yet
- SMT. SULOCHANADEVI SINGHANIA SCHOOL MATH EXAM REVIEWDocument6 pagesSMT. SULOCHANADEVI SINGHANIA SCHOOL MATH EXAM REVIEWSneh BhalodiaNo ratings yet
- Time Series Forecasting - Sparkling - Buisness ReportDocument70 pagesTime Series Forecasting - Sparkling - Buisness ReportPriyanka PatilNo ratings yet
- Soil Mechanics Laboratory: A Guide For Preparing Laboratory ReportsDocument10 pagesSoil Mechanics Laboratory: A Guide For Preparing Laboratory ReportsohnthaikNo ratings yet
- Stereotypes GendersDocument4 pagesStereotypes Genders4jgzhmyprdNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Rotational Motion MCQsDocument23 pagesRotational Motion MCQsDeepanshu LullaNo ratings yet
- Probability ScaleDocument4 pagesProbability ScaleMichaelKokolakisNo ratings yet
- Relational Comparisons in AliceDocument4 pagesRelational Comparisons in AliceAhmad Abdul HadiNo ratings yet
- SAT Chemistry TextbookDocument112 pagesSAT Chemistry TextbookSai Sagireddy100% (2)
- 28-11-22 JR - Iit Star Co-Sc Model-A Jee Adv 2018 P-II Cat-8 Key & Sol FDocument11 pages28-11-22 JR - Iit Star Co-Sc Model-A Jee Adv 2018 P-II Cat-8 Key & Sol Fzaid khanNo ratings yet
- Rajasthan Technical University B.Tech SyllabusDocument8 pagesRajasthan Technical University B.Tech SyllabusAmit BagrechaNo ratings yet
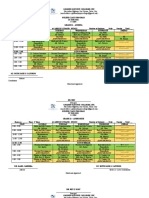
- 7 19 Updated Grade 11 Students Online Schedule 2021 2022 1st SemDocument8 pages7 19 Updated Grade 11 Students Online Schedule 2021 2022 1st SemAngelo MartinezNo ratings yet
- FPP Week 1 2 Lecture SlidesDocument84 pagesFPP Week 1 2 Lecture SlidesestifNo ratings yet
- Geophone and AkselerometerDocument173 pagesGeophone and AkselerometerNajib Arangi PanjahNo ratings yet
- Unsteady Laminar Flow Around A CylinderDocument25 pagesUnsteady Laminar Flow Around A CylinderCantalicioNo ratings yet
- Teaching Case Study: Heat TransferDocument4 pagesTeaching Case Study: Heat TransferJulendra AriatedjaNo ratings yet
- Microsoft Word - Area RelatedDocument1 pageMicrosoft Word - Area Relatedjitender8No ratings yet
- Lie Beck 1978Document15 pagesLie Beck 1978YogendraKumarNo ratings yet
- Formal Methods: Finite State Machine - Regular ExpressionsDocument14 pagesFormal Methods: Finite State Machine - Regular ExpressionsStatus LifeNo ratings yet
- C03-001-Structural Steel CalculationsDocument166 pagesC03-001-Structural Steel CalculationsNguyễnBìnhPhươngNo ratings yet
- Revealed Preference and Compensated Demand in Economics (39Document5 pagesRevealed Preference and Compensated Demand in Economics (39jiosjaNo ratings yet
- Line-It-Up Math WorksheetDocument2 pagesLine-It-Up Math WorksheetI U100% (1)
- Chapter 2 Fundamental Simulation ConceptsDocument50 pagesChapter 2 Fundamental Simulation ConceptsHrishikesh WaghNo ratings yet
- Optimum Design of Reinforced Concrete Rectangular Beams Using Simulated AnnealingDocument10 pagesOptimum Design of Reinforced Concrete Rectangular Beams Using Simulated AnnealingAndripgaNo ratings yet
- Artificial Intelligence: From Medieval Robots to Neural NetworksFrom EverandArtificial Intelligence: From Medieval Robots to Neural NetworksRating: 4 out of 5 stars4/5 (3)
- Artificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureFrom EverandArtificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureRating: 4.5 out of 5 stars4.5/5 (2)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- Collection of Raspberry Pi ProjectsFrom EverandCollection of Raspberry Pi ProjectsRating: 5 out of 5 stars5/5 (1)
- Comprehensive Guide to Robotic Process Automation (RPA): Tips, Recommendations, and Strategies for SuccessFrom EverandComprehensive Guide to Robotic Process Automation (RPA): Tips, Recommendations, and Strategies for SuccessNo ratings yet
- PLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsFrom EverandPLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsNo ratings yet
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.From EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Rating: 4 out of 5 stars4/5 (5)
- Artificial You: AI and the Future of Your MindFrom EverandArtificial You: AI and the Future of Your MindRating: 4 out of 5 stars4/5 (3)