You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5813)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- MR Maina's CCTV EstimateDocument3 pagesMR Maina's CCTV EstimateOdongo SolomonNo ratings yet
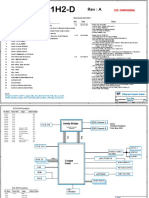
- h61h2 D It8758e (Diagramas - Com.br)Document31 pagesh61h2 D It8758e (Diagramas - Com.br)edsonportosomNo ratings yet
- Java Quiz Solutions-1Document21 pagesJava Quiz Solutions-1Navyasri.O PulasettiNo ratings yet
- Bomb LabDocument19 pagesBomb Labdavid gongNo ratings yet
- VirtualizationDocument60 pagesVirtualizationDatta GhonseNo ratings yet
- 1 - Introduction To Information TechnologyDocument26 pages1 - Introduction To Information Technologylee robert olivarNo ratings yet
- Proceso Reparar Imei Samsung G610MDocument1 pageProceso Reparar Imei Samsung G610MUnlock HtcNo ratings yet
- Manual de Atualização Cuvave Cube BabyDocument11 pagesManual de Atualização Cuvave Cube BabyvagnermonteirorjNo ratings yet
- HPE 3PAR StoreServ 20000 Storage Service and Upgrade Guide Service EditionDocument282 pagesHPE 3PAR StoreServ 20000 Storage Service and Upgrade Guide Service Editionben boltNo ratings yet
- HP Selection GuideDocument33 pagesHP Selection GuideJosé Gerardo BarragánNo ratings yet
- R-Car Starterkit Hardware Manual: R-Car Starter Kit Premier R-Car Starter Kit ProDocument37 pagesR-Car Starterkit Hardware Manual: R-Car Starter Kit Premier R-Car Starter Kit ProbengaltigerNo ratings yet
- Celsius M720 Celsius M730: System Operating ManualDocument78 pagesCelsius M720 Celsius M730: System Operating ManualmrscribdNo ratings yet
- P&H Shovel Option ScreensDocument21 pagesP&H Shovel Option ScreensGilney FreitasNo ratings yet
- Brkarc 3000Document242 pagesBrkarc 3000Thomas NilsenNo ratings yet
- Linux With ARM A9Document65 pagesLinux With ARM A9YasirNo ratings yet
- Raspberry Pi - OpenMP C++ Tutorial IUBDocument16 pagesRaspberry Pi - OpenMP C++ Tutorial IUBSayem ChakladerNo ratings yet
- Introduction To MIDIDocument11 pagesIntroduction To MIDILacksumiy MurthyNo ratings yet
- Entrega Inmediata Gamer LabDocument20 pagesEntrega Inmediata Gamer LabBoris CocaricoNo ratings yet
- 220 701Document283 pages220 701tisham5oooooNo ratings yet
- GA Z77MX D3H Rev.1.0 SchematicDocument34 pagesGA Z77MX D3H Rev.1.0 SchematicLân Sharp0% (1)
- Hitachi EUB-5500 Ultrasound - Service ManualDocument148 pagesHitachi EUB-5500 Ultrasound - Service ManualRef Italia91% (11)
- Every Serious Data Recovery Engineer Uses PC-3000!Document19 pagesEvery Serious Data Recovery Engineer Uses PC-3000!dugi_74100% (1)
- Jaltest CV Catalogo Digital en 1216Document28 pagesJaltest CV Catalogo Digital en 1216GEORGE MIHAINo ratings yet
- Dmt48270T043 - 15Wt: 4.3 Inches, 480Xrgbx272, 65K Colors, Dgus LCMDocument4 pagesDmt48270T043 - 15Wt: 4.3 Inches, 480Xrgbx272, 65K Colors, Dgus LCMGandy Torres TorresNo ratings yet
- Upgrade Instructions: Valid For Sinumerik 840D Software Version 07.04.36.00Document15 pagesUpgrade Instructions: Valid For Sinumerik 840D Software Version 07.04.36.00Sam eagle goodNo ratings yet
- Asus Product Guide: The World's Smallest 14" LaptopsDocument23 pagesAsus Product Guide: The World's Smallest 14" LaptopsAgent of ChangeNo ratings yet
- ps2251-33 Datasheet 700 PDFDocument19 pagesps2251-33 Datasheet 700 PDFgreemaxNo ratings yet
- Proposal For HP Server-2Document3 pagesProposal For HP Server-2Paras MalhotraNo ratings yet
- Esquema Eletrico ECS G41T-R3Document29 pagesEsquema Eletrico ECS G41T-R3bentogil75% (4)
- Ecosys M3040idn M3540idn M3550idn M3560idnenrmr16Document44 pagesEcosys M3040idn M3540idn M3550idn M3560idnenrmr16Alejandro100% (1)