You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (843)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5807)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (346)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Evaluating Information Sources (Print vs. Web) : Module in English 10Document24 pagesEvaluating Information Sources (Print vs. Web) : Module in English 10Lilah Blair75% (4)
- MIL-HDBK-756 Manufacture of Projectiles, Projectile Components, and Cartridge Cases For Artillery, Tank Main Armament, and Mortars PDFDocument147 pagesMIL-HDBK-756 Manufacture of Projectiles, Projectile Components, and Cartridge Cases For Artillery, Tank Main Armament, and Mortars PDF劉永賢No ratings yet
- Service Manual: (Snowmobile)Document196 pagesService Manual: (Snowmobile)serg perNo ratings yet
- Finacle 10x - Menu OptionsDocument8 pagesFinacle 10x - Menu OptionsMohit100% (2)
- A7 B7 Locomotive Brake Equipment TestDocument14 pagesA7 B7 Locomotive Brake Equipment TestFrancesca Parrino100% (1)
- TR-8000 Manual TecnicoDocument65 pagesTR-8000 Manual TecnicoRicardo Dutra100% (1)
- Nov. 7 G10Document56 pagesNov. 7 G10Honey Diana MejiaNo ratings yet
- M.Sc. Thesis 57 PDFDocument1 pageM.Sc. Thesis 57 PDFYasser AnisNo ratings yet
- 3.2.4 Equation of Motion of The Plunger: X FX pA-FDocument1 page3.2.4 Equation of Motion of The Plunger: X FX pA-FYasser AnisNo ratings yet
- M.Sc. Thesis 55Document1 pageM.Sc. Thesis 55Yasser AnisNo ratings yet
- M.Sc. Thesis 13Document1 pageM.Sc. Thesis 13Yasser AnisNo ratings yet
- 1.1 Types of Pump ControllersDocument1 page1.1 Types of Pump ControllersYasser AnisNo ratings yet
- B - FROST COMPANY HRM CherrieDocument35 pagesB - FROST COMPANY HRM CherrieMickaela CaldonaNo ratings yet
- The Four Wheels of GrowthDocument2 pagesThe Four Wheels of Growthmattvincent loisaga100% (1)
- Eia Cu PDFDocument77 pagesEia Cu PDFRithika Raju ChallapuramNo ratings yet
- U-5 FamilyDocument10 pagesU-5 FamilyThein Myint SanNo ratings yet
- History of World BankDocument6 pagesHistory of World BankRey Anne DetoperezNo ratings yet
- Comparative Analysis of Accounting Systems in Russia Spain and GermanyDocument3 pagesComparative Analysis of Accounting Systems in Russia Spain and GermanyAna MariaNo ratings yet
- Individual Medical Policy For Dependents - Dmed: Table of BenefitsDocument6 pagesIndividual Medical Policy For Dependents - Dmed: Table of Benefitsrahul sNo ratings yet
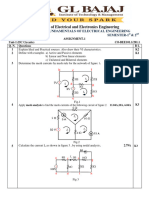
- EE Assignment 23-24 Sem 1Document7 pagesEE Assignment 23-24 Sem 1Triggered CreatorNo ratings yet
- Data Sheet SWA2000 C - 09 2019 - ENDocument2 pagesData Sheet SWA2000 C - 09 2019 - ENsunobinachuksNo ratings yet
- Ssociates, Inc.: Heat Transfer CementDocument2 pagesSsociates, Inc.: Heat Transfer CementRahul LavandNo ratings yet
- BCM Power Analyser: Modbus Address List (For Firmware Version 1.126 or Higher)Document73 pagesBCM Power Analyser: Modbus Address List (For Firmware Version 1.126 or Higher)peer khanNo ratings yet
- FAVORIT 515 (515/00101-99999) 2025 CrankcaseDocument3 pagesFAVORIT 515 (515/00101-99999) 2025 CrankcasePatrick LandinNo ratings yet
- For Electrospray and Electrospinning: Fluidnatek® LE 10Document1 pageFor Electrospray and Electrospinning: Fluidnatek® LE 10djaswar storeNo ratings yet
- Ecommerce Website Mumbai - EditedDocument9 pagesEcommerce Website Mumbai - EditedVikram SinghNo ratings yet
- Throttle Control of An Extinguishable Solid Propellant Thruster SystemDocument2 pagesThrottle Control of An Extinguishable Solid Propellant Thruster Systemh_mahdiNo ratings yet
- Husky HyPET - Features and Options - Booklet - v9.11Document18 pagesHusky HyPET - Features and Options - Booklet - v9.11Dawn UnderNo ratings yet
- Astar TutorialDocument5 pagesAstar Tutorialayesha_khan963No ratings yet
- Prime+h310m-R+r2 0Document1 pagePrime+h310m-R+r2 0Wilkison Ribeiro BarreirosNo ratings yet
- Linetraxx® Ctac Series: Measuring Current TransformersDocument6 pagesLinetraxx® Ctac Series: Measuring Current TransformerschungnvNo ratings yet
- 3rd FloorDocument1 page3rd FloorJopheth RelucioNo ratings yet
- Behrens, R. (2002)Document13 pagesBehrens, R. (2002)Patty LinNo ratings yet
- FL Eng Scatalogo 1 1 0 CARS PDFDocument129 pagesFL Eng Scatalogo 1 1 0 CARS PDFcalogero19824660No ratings yet
- Written Report Substantive Tests of Transactions and BalancesDocument35 pagesWritten Report Substantive Tests of Transactions and BalancesDiether ManaloNo ratings yet